无人机遥感影像在油菜品种识别中的应用
2022-07-16李婕李毅张瑞杰李俐俐李礼姚剑乔江伟
李婕 李毅 张瑞杰 李俐俐 李礼 姚剑 乔江伟













摘要: 采用無人机遥感技术进行油菜品种识别,是产量预测及灾害评估的重要前提和基础。本研究利用无人机作为数据采集设备,以基地24个品种油菜苗期育种材料为识别数据,将无人机获取的影像进行拼接、裁剪、旋转等预处理,按照4∶ 1划分训练集和测试集,构建注意力机制引导的卷积神经网络搭建油菜影像识别网络模型,并采用总体准确率、Kappa系数等评价参数对识别结果进行评价。结果表明,本研究的网络模型识别准确率和Kappa系数分别达到了89.60%和0.889 4,高于5个经典网络模型。说明,注意力机制能够更加充分地提取无人机遥感影像的油菜特征,有效地提高卷积神经网络对不同品种油菜的识别精度。本研究网络模型弥补了传统油菜细分需要人力统计及现有方法设备成本高的缺陷,为采用无人机遥感技术进行作物品种识别提供技术支撑。
关键词: 油菜; 无人机遥感技术; 品种识别; 卷积神经网络; 注意力机制
中图分类号: TP75 文献标识码: A 文章编号: 1000-4440(2022)03-0675-10
Application of UAV remote sensing image in rape variety identification
LI Jie 1 , LI Yi 1 , ZHANG Rui-jie 2 , LI Li-li 2 , LI Li 2 , YAO Jian 2 , QIAO Jiang-wei 3
(1.School of Electrical and Electronic Engineering, Hubei University of Technology, Wuhan 430068, China; 2.School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430070, China; 3.Oil Crops Research Institute, Chinese Academy of Agricultural Sciences, Wuhan 430062, China)
Abstract: Using unmanned aerial vehicle (UAV) remote sensing technology to identify rape varieties is an important prerequisite and basis for yield prediction and disaster assessment. In this study, UAV was used as data acquisition equipment, and the breeding materials of 24 rape varieties at seedling stage in the base were used as identification data. The images obtained by the UAV were preprocessed such as splicing, clipping and rotation. The training set and test set were divided according to the ratio of 4∶ 1, and the convolutional neural network guided by attention mechanism was constructed to build the recognition model. The overall accuracy, Kappa coefficient and other evaluation parameters were used to evaluate the recognition results. The results showed that the recognition accuracy and Kappa coefficient of the network model constructed in this study reached 89.60% and 0.889 4 , respectively, which were higher than those of the five classical network models. The attention mechanism can extract the rape features of UAV remote sensing images more fully, and effectively improve the recognition accuracy of convolutional neural network for different varieties of rape. The network model constructed in this study makes up for the shortcomings of human statistics and high cost of existing methods and equipment, and provides technical support for crop variety identification using UAV remote sensing technology.
Key words: rape; unmamed aerial vehicle (UAV) remote sensing technology; variety identification; convolutional neural network; attention mechanism
油菜是中国主要的油料作物,占世界产量的20%,在国民经济发展中占据着举足轻重的地位 [1-2] 。长江中下游作为油菜高产区,油菜品种繁多,不同品种的产量、抗性等有所差异,因此,及时、准确地获取油菜品种种植信息是产量预测及灾害评估的重要前提和基础,对油菜种植规划及生产管理措施制定具有重要意义。
长期以来,中国油菜品种种植信息等重要农业统计数据,主要通过人工统计等传统方法获得,普遍存在调查工作量庞大、财力和物力耗费高、调查周期长等诸多缺陷。如今,遥感技术发展迅速,利用高分辨率的卫星并以地面采样调查为辅助,可实现油菜种植品种信息的精细提取 [3] ,但是由于卫星重返周期长,指定区域的实时性数据无法保证,所以单一利用遥感进行油菜品种识别,监测精度无法满足实时性要求。因此,采用无人机遥感技术进行油菜品种细分成为必要。
目前,无人机遥感结合深度学习技术在大面积、快速、不破坏作物结构的同时能够获取不同时空的多尺度作物冠层信息 [4] ,为作物表型研究 [5-6] 、产量及品质监控评估 [7-8] 、作物长势动态 [9] 、精细农业 [10] 等提供了可视化的分析依据。无人机根据载荷、监测目的的不同能够搭载不同类型的遥感传感器。虽然无人机搭载多光谱成像传感器的应用较多 [11-12] ,但多光谱传感器存在波段数有限、光谱信息量小、样本标记代价高的问题,使其大面积推广应用受到限制;而无人机搭载高光谱传感器在农作物精细识别方面得到广泛应用 [13-16] ,由于其获取的影像包含数百个波段,光谱分辨率能够达到2~ 4 nm,因此高光谱成像传感器能够准确地反映大田中农作物的光谱特征和不同农作物之间的光谱差异 [17] ,但也存在样本标记代价高,实施成本昂贵的问题 [18] 。
无人机搭载RGB相机,具有成本低且受天气影响较小等优点,能够获取占用内存较小的数码照片,使大面積农田信息快速采集、简单处理成为可能 [19] 。近年来国内外学者运用无人机搭载RGB相机的数码照片对农作物信息进行提取取得了不错的效果,Bendig等 [20] 利用数码相机估算大麦的株高、叶面积指数、倒伏状况等信息,牛庆林等 [21] 采用无人机 RGB 影像提取各个时期、各个田块玉米的株高信息。目前应用低空无人机遥感手段估测油菜成长参数的研究尚处在初级阶段,已有的基于RGB相机对油菜品种的细分研究主要以近距离拍摄的图像作为输入 [22-23] ,鲜少仅以高空农作物影像作为输入。因此,本研究基于深度学习理论,以无人机获取的影像为数据,利用不同油菜品种的高空视觉表型特征,提出一种基于普通消费级无人机遥感影像的油菜品种的识别方法。该方法采用多尺度特征的提取方式,结合通道注意力机制,利用高维空间的最优分类函数,对模型进行优化,使之与高空拍摄农作物影像的识别与处理吻合。最后,通过构建多组数据、多种模型的对比试验,验证该方法的有效性,为油菜的品种识别及农作物智慧决策提供有益补充。
1 材料与方法
1.1 试验布置与数据采集
油菜种植分为冬油菜(9底种植,次年5月收获)和春油菜(4月底种植,9月收获)。其中,冬油菜的种植面积和产量均占全国的90% 以上,占世界的1/4。本研究选取湖北省武汉市新洲区中国农业科学院油料作物研究所阳逻基地(30°42′E,14°30′N)作为研究区域(图1),该区域海拔约24 m,气候类型为亚热带季风气候。试验田共分252个小区,小区面积分为8 m2(2 m× 4 m)和6 m2(2 m× 3 m) 2种。试验选择24个不同品种的油菜材料,以p1~p24依次命名,其中,p1~ p6每个品种重复种植24个小区,p7~ p24每个油菜品种重复种植6个小区。试验时间在冬油菜的幼苗期,即2020年10月至次年1月。
数据采集使用的无人机型号为大疆精灵Phantom 4 Pro V2.0,搭载相机为2× 10 7 像素,拍摄单张图像尺寸为5 472× 3 648 ,具体采集环境如表1所示。采用自动规划航拍模式,航向重叠率和旁向重叠率设定为75%,飞行高度10 m,以等距间隔方式进行拍照,飞行速度为1.9 m/s ,约10 min完成研究区域数据采集。大田24个不同品种的油菜苗期影像数据输入,按照从左至右,自上而下顺序分别放置了第1种至第24种不同油菜品种材料影像(图2)。由图2可以发现,部分品种视觉效果差异很小。
1.2 数据预处理
为了获取识别网络模型的训练样本,无人机分别拍摄了油菜在六叶期、八叶期以及十叶期的影像数据,每期包含p1~ p24共24个油菜品种数据集,将获取的无人机遥感影像数据进行预处理,每期油菜数据集进行4∶ 1划分训练集和测试集。具体步骤如图3所示。首先将研究区域的无人机航拍影像进行拼接,获取大田的正射影像,然后利用图像处理软件将正射影像按照实际地面尺寸进行裁剪,同时综合大田种植时的数据,为对应的影像打上标签。因为试验田和油菜品种有限,所以获取的影像数据较少,可能不满足模型训练的特征提取,为了解决这个问题,本研究对标记好的原始图片进行裁剪,并考虑到数据采集过程中天气情况对图像亮度的影响不同,对剪裁图像的亮度进行了操作。首先将图像从RGB色彩空间转变到HSV色彩空间,然后对亮度进行调整,以10%的比例增加亮度,使网络模型对不同天气造成的亮度变化具有更强的适应性。为了增加训练样本以防止图像数据过度拟合,需要对裁剪得到的中图影像进行数据扩展。将获取的单张品种p1~ p6油菜中图影像裁剪成18张小图,品种p7~ p24油菜中图影像裁剪成15张小图,得到最终的网络模型训练和测试所需要的剪裁后的数据集(图3)。
1.3 油菜品种识别网络模型
本研究采用的网络模型结构图如图4所示,其中主干网络模型共分为3个尺度模块,每个尺度模块由2个连续的3× 3卷积层( stride =1)及ReLU非线性激活函数组成,为了扩展到下一个尺度模块,采用2× 2最大池化层并保留输出块中的最大像素使输出分辨率减半。虽然每个卷积步骤中都存在2个像素的损失,但由于本研究目标不是精确的特征定位,因此在不影响整体性能的情况下提高了训练和推理速度。
考虑到网络模型的全局表现以及提升运行速度,在每一次非线性激活函数之后,实行批量归一化。识别部分采用参数较少的卷积操作来完成,通过特征提取得到图像的特征后,首先经过1× 1的卷积将特征图维度调整成1,然后用全局平均池化层得到输入图像的24类识别结果,最终用Softmax将结果转化为各品种的概率。
为了让网络模型在通道之间筛选提取出更加有用的特征信息,本研究考虑在主干网络模型的基础上添加注意力模块。具体的结构框图如图5所示。首先,通过对卷积得到的特征图进行处理,得到一个和通道数相同的一维向量作为每个通道的评价分数,然后将该分数分别施加到对应的通道上。假设特征图维度为 h× w× c ,在此基础上做全局池化,池化窗口为 h× w ,通道数不变,那么经过池化操作得到 1× 1× c 的特征图;然后,连接2个全连接层,其中,第一个全连接层神经元个数为 c/r ,相当于对 c 进行了降维;输入 c 个特征,第二个全连接层神经元个数为 c ,相当于维度回到了 c 个特征,与直接用1个全连接层相比,这种链接方式具备更多的非线性,可以更好地拟合通道间复杂的相关性,因此极大地减少了参数量和计算量;最后,考虑到通道之间的相关性,连接1个sigmod层,得到 1× 1× c 的特征图输出。
主干网络模型的特征图维度 h× w× c ,输入到注意力模块,得到通道的权值,维度为 1× 1× c ,将主干网络模型特征图与权重特征图相乘,得到的特征图对应的每个通道的重要性不同,权重大的特征值更大。
在训练过程中,采用Loss函数为交叉熵函数,损失函数表达式如公式1所示:
L=1N∑(-∑M c=1 y ic lg p ic ) (1)
其中, M 表示类别数, y ic 为指示变量,如果该类别与样本 i 的类别相同则为1,否则为0; p ic 表示观测样本 i 为类别 c 的预测概率; N 为样本的数量。而本研究所对应的任务,需要用多分类的交叉熵函数对24类的交叉熵函数进行扩展。
1.4 评价指标
本研究深度学习运行硬件环境为Ubuntu 16.04,硬件内存为128 G,2张NVIDIA GTX 1080Ti显卡。为了检验模型的稳定性,本研究利用交叉验证的方法,将样本集分成5份,按照4∶ 1划分训练集和测试集,最终计算 n 次训练下的评价指标。本研究采用公式(2)~公式(7)所示的评价指标来评估网络模型整体性能Top3和Top5准确率,即在概率向量最大的前3/前5中,只要出现了正确概率即为预测正确。
A(Accuracy)=TP+TNTP+TN+FP+FN (2)
P(Precision)=TPTP+FP (3)
R(Recall)=TPTP+FN (4)
F1 = 2×P×RP+R (5)
MacroF1 =∑ F1 i n (6)
MicroF1 = 2×all_p×all_rall_p+all_r (7)
其中,准确率 (Accuracy) :识别正确样本数除以总样本数;查准率 (Precision) :识别正确的正样本个数占分类器分成的所有正样本个数的比例;召回率 (Recall) :识别正确的正样本个数占实际正样本个数的比例; MacroF1 和 MicroF1 值:兼顾识别模型的查准率和召回率,是两者的调和均值; TP ( True Positive )表示正类样本被模型分为正类样本, FP ( False Positive )表示负类样本被模型分为正类样本。 TN ( True Negetive )表示负类样本被模型分为负类样本, FN ( False Negetive )表示正类样本被模型分为负类样本。
2 结果与分析
2.1 本研究网络模型的验证
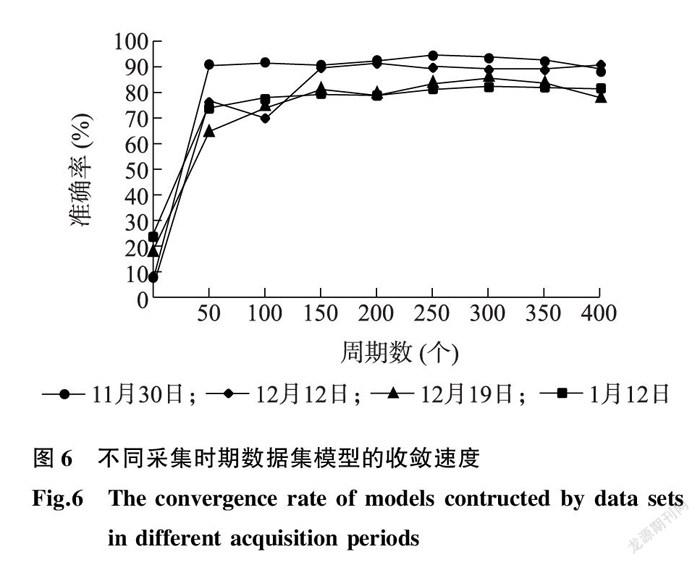
为了验证本研究网络模型的有效性,本研究分别用4个单独时期的油菜数据集进行试验。每期数据按照4∶ 1的比例划分训练小区和测试小区,然后将对应小区增强后的数据作为训练数据集和测试数据集,得到参与训练和测试的样本数量分别为6 510 张和1 914 张,如表2和表3所示。经过迭代后训练效果如图6所示,从图6可以看出,随着迭代次数的增加,精度提升,误差降低,大约训练150个周期后,误差和精度趋于平稳,说明网络模型的偏差、方差和精度接近完全收敛。
在试验中基本参数设置,学习率为0.01,batch_size为32,epoch为300。试验得到6个性能指标在4个数据集里的整体性能如表4所示。对比不同油菜苗期数据集上的识别结果,总体上前期识别精度更高,各项性能指标更好,油菜在六叶期更加适合品种识别。
为了评价本研究网络模型识别不同品种油菜的效果,对24个油菜品种p1~ p24进行归类分析,每个品种识别精确度如图7所示。对4个采集时期的每个油菜品种识别精度求平均,将平均识别精度效果分为4个层次,高于95.0%为识别效果最好, 85.1%~ 95.0%为较好, 75.1%~ 85.0%为一般,低于75%为较差,具体识别效果如表5所示。结果表明,本研究模型对p3、p5、p11、p12、p19、p22、p23、p24这8个油菜品种识别效果最好,平均精度都是95%以上,尤其是品种p12和p22,其识别精度分别达到了99.45%和99.19%;但是對品种p1和p7识别效果较差,其识别精度只有68.62%和72.73%,分析原因可能是品种p1和p7整体表型差异性较小,叶片密集且极度相似,视觉上难以区分(图8),网络模型对其误判严重,所以导致识别精度不高。
2.2 本研究网络模型在不同时期采集数据上的识别精度分析
在4个采集时期中,本研究网络模型随着油菜成长期的推进对其识别的准确率呈下降趋势, F1、Top3、Top5 指标也相应下降。因为进入八叶期、十叶期,叶片逐渐茂盛,随着生长发育进程的推进,油菜叶形不断发生变化,而气温长时间在零下的越冬期,叶形最复杂,因为油菜叶片会出现受冻症状。图9展示了油菜品种p1在同一位置的4个采集时期的影像,从图9中可以发现,第4次采集的数据与前面3次采集的数据相比,差异较大。因为第4次采集的数据采集时间正处于冬油菜的越冬期,由于气温较低,油菜叶片呈现卷曲现象,甚至有的叶片发紫变黄,出现不同程度的冻伤现象,从而导致准确率及识别精度与前面3次相比有所降低。
图10为本研究模型在4个采集时期形成的混淆矩阵,其中混淆矩阵的行表示真实值的样本,每一行之和表示真实样本数量;混淆矩阵的列表示预测样本类别,每一列之和表示预测为该类别的样本数量。通过混淆矩阵可以看出,基于当前的样本集合,有一些类别具有较强相似性。
2.3 识别结果的可视化
本研究在试验田的测试区展示了第2次采集数据的识别结果。这种显示方式一定程度上可以帮助管理者快速获得识别结果。如图11所示,黑色实线矩形框区域为本次分类实验田,黑色虚线内的白色矩形框区域为测试区的47个小区,种有24个品种。放大的测试区中颜色越深表明小区的分类错误率越高,从试验结果可以看出,测试区1主要为品种p1至p6,结果显示无错分类别;测试区2为品种p7至p24,其中,颜色最深的2块小区对应的品种p16容易被错分为品种p4,剩下的较浅的错分区域主要为品种p13和p15分类混淆。
本研究将错分的类别影像进行了对比,分类错误的样本与真实的样本视觉上具有极高的相似度,导致本研究模型误判,从而降低了不同油菜品种识别的区分精度,这几个品种在幼苗期具有极强的相似性,油菜生长周期长,不同时期不同环境生长的油菜特征差异可能会更加明显,因此可能需要在不同时期不同种植位置采集这几个相似性强的品种,获取更多数据,增加差异性,得到更强的特征,从而更好地加以细分。由于本研究网络模型属于轻量化设计,所以网络模型训练参数量少,速度快,网络模型结构简单,因此对极相似油菜品种不易区分,后续考虑改进算法增加网络模型复杂度和采集不同环境下的数据,提高差异性较小的不同油菜品种的识别能力,增加网络模型的鲁棒性。
2.4 本研究网络模型与传统识别网络模型的对比
为了验证本研究提出的网络模型的客观性,本研究将其分别与Resnet [24] 、Densenet [25] 、Resnext [26] 、Efficientnet [27] 、Shufflenet [28] 5种经典的网络模型进行对比,试验过程中采用相同的基本参数,由于不同品种油菜生长不同步,有的油菜品种早期叶片极度稀少,晚期油菜叶片有大量冻伤,这些数据会影响数据集的质量,所以本研究选择在生长状况较好的八叶期采集的数据。
不同网络模型在同一个数据集的相同基本参数下的各项性能指标如表6所示。从表6可以看出,本研究提出的网络模型在各项指标上的精度都高于其他5个经典网络模型,准确率达到89.60%。 Densenet网络模型是通过每层直接相连的相邻设置,对上一层学习到的特征进行重用,极大地减少网络的参数量,加强了特征传播,缓解了梯度消失的问题,便于更好训练,提升了识别准确率,因此在5种经典网络模型中拥有最高的准确率。Resnext、Efficientnet、Resnext网络模型的准确率相近,相比于Resnet网络模型,准确率提升了4个百分点左右,而Resnet网络模型卷积层层数多,参数量大,训练时间长,在本研究构造的小数据集中的准确率最低。Resnext网络模型利用分组卷积控制基数减少了超参数,简化了网络模型结构。Efficientnet和Shufflenet网络模型也通过建立轻量级网络模型减少网络模型复杂度和减少训练时间来提升准确率,这2种网络模型准确率、 Macro_F1和Top3以及Top5 的数值相近。
总体而言,由于经典网络模型常具有较多的参数 [29-30] ,因此容易发生过拟合,而本研究设计的网络模型,结构简单,参数量较少,并且能够更精确地识别不同品种的油菜。
3 讨 论
针对传统油菜品种细分需要人力统计及现有方法设备成本高的问题,本研究提出了一种基于普通消费级无人机遥感影像的油菜品种识别方法,采用无人机遥感进行了数据采集、数据预处理等研究工作,结合本研究提出的网络模型结构,首先对4次采集的油菜数据进行了试验以寻找最适合分类的油菜时期,再用油菜八叶期的2个时间段合并的数据集与传统网络模型进行对比,并对识别结果进行分析,结果表明:
(1)基于SE注意力模块的卷积神经网络能够从油菜作物无人机遥感影像中学习到表达力更强的语义特征,提取特征更加充分。且本研究网络模型架构简单,参数量较少,在增加SE注意力模块后,网络模型学习的特征信息丰富,从而能够达到对油菜生长时期关键节点的影像快速分类的目的。与Resnet、Densenet 、Resnext 、Efficient 、Shufflenet等传统网络模型相比,本研究网络模型识别准确率和Kappa系数最高,达到了89.60%和0.889 4 ,为利用无人机遥感影像识别油菜品种提供了一种新的技术参考。
(2)通过对24个油菜品种进行归类分析,发现在品种p1~ p24中,本研究网络模型最容易识别出品种p12和p22,其识别精度接近100%,对品种p3、p5、p11、p19、p23、p24這6个品种识别效果也很好,平均精度都在95%以上,但是对p1和p7识别效果较差,其精度只有70%左右,余下14个品种识别效果都处于较好级别,整体识别效果较好,表明无人机遥感影像结合增加注意力模块的卷积神经网络能够很好地对油菜品种进行识别。
(3)冬油菜进入八叶期、十叶期,叶片逐渐茂盛,随着生长发育进程的推进,油菜叶形不断的发生变化,而当油菜长时间处于气温零下的越冬期时,叶形最复杂,温度降低导致部分油菜品种叶片出现受冻症状,视觉效果呈现为叶片卷曲和颜色变深,具体表现为叶片发黄或发紫、皱缩、僵化、叶柄呈水渍状;而当温度回升、土壤解冻后,叶片逐渐萎蔫、变黄、脱落,导致同一品种的无人机遥感影像差异大,从而使网络模型学习特征较难,致使网络模型识别精度下降。因此,识别时期应选择在幼苗期前期。
结合无人机遥感影像与深度学习在油菜品种识别中展现出的较好效果,增加SE注意力模块后的网络模型与传统网络模型相比,在准确率上也有较大优势,各项性能指标均有提高。但由于试验小区及品种的局限性,后续将考虑增加试验田和油菜品种,用以验证网络模型结构的鲁棒性;另外,考虑到在幼苗期部分品种的相似性,本研究考虑添加不同物候期的油菜数据用于后续精细化的识别研究。
参考文献:
[1] QIONG H, WEI H, YAN Y, et al. Rapeseed research and production in China[J]. The Crop Journal, 2017, 5(2): 127-135.
[2] 刘 成,冯中朝,肖唐华,等. 我国油菜产业发展现状、潜力及对策[J].中国油料作物学报, 2019, 41(4): 485-489.
[3] 王晨宇,张亚民,吴伯彪,等. 基于无人机遥感的农作物自动分类研究[J]. 农业与技术, 2021, 41(1): 52-57.
[4] 尹 凡,刘 燕,董晶晶,等. 基于冠层实测光谱的油菜品种识别[J]. 湖北农业科学, 2013, 52(23): 5866-5870.
[5] 袁培森,李润隆,任守纲,等. 表示学习技术研究进展及其在植物表型中应用分析[J]. 农业机械学报, 2020, 51(6):1-14.
[6] JIANG Y, LI C. Convolutional neural networks for image-based high-throughput plant phenotyping: a review[J]. Plant Phenomics, 2020, 2(1): 1-22.
[7] MASJEDI A, CARPENTER N R, CRAWFORD M M, et al. Prediction of sorghum biomass using UAV time series data and recurrent neural networks[C]. Long Beach, America: IEEE/CVF, 2019.
[8] MASJEDI A, ZHAO J, ZHAO J, et al. Sorghum biomass prediction using UAV-Based remote sensing data and crop model simulation[C]. Valencia, Spain: IEEE, 2018.
[9] KOH J C O, HAYDEN M, DAETWYLER H, et al. Estimation of crop plant density at early mixed growth stages using UAV imagery[J]. Plant Methods, 2019, 15(1):1-9.
[10] BAUER A, BOSTROM A G, BALL J, et al. Combining computer vision and deep learning to enable ultra-scale aerial phenotyping and precision agriculture: a case study of lettuce production[J]. Horticulture Research, 2019, 6(1): 1-12.
[11] CANDIAGO S, REMONDINO F, GIGLIO M D, et al. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images[J]. Remote Sensing, 2015, 7(4): 4026-4047.
[12] VERGER A, VIGNEAU N, CHRON C, et al. Green area index from an unmanned aerial system over wheat and rapeseed crops[J]. Remote Sensing of Environment, 2014, 152: 654-664.
[13] 張 丰,熊 桢,寇 宁. 高光谱遥感数据用于水稻精细分类研究[J]. 武汉理工大学学报, 2002, 24(10): 36-39.
[14] 刘 亮,姜小光,李显彬,等. 利用高光谱遥感数据进行农作物分类方法研究[J]. 中国科学院研究生院学报, 2006, 23(4):484-488.
[15] 孙 婷,田建平,胡新军,等. 基于高光谱成像技术的酿酒高粱品种分类[J]. 食品与发酵工业, 2021, 47(5):186-192.
[16] 王林江,吴炳方,张 淼,等. 关键生育期冬小麦和油菜遥感分类方法[J]. 地球信息科学学报, 2019, 21(7): 1121-1131.
[17] COLOMINA I, MOLINA P. Unmanned aerial systems for photogrammetry and remote sensing: a review[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 92: 79-97.
[18] 陈小帮,左亚尧,王铭锋,等. 面向深度学习识别高空农作物的方法[J]. 计算机工程与设计, 2020, 41(2): 580-586.
[19] 戴建国,张国顺,郭 鹏,等. 基于无人机遥感可见光影像的北疆主要农作物分类方法[J]. 农业工程学报, 2018, 34(18): 122-128.
[20] BENDIG J, BOLTEN A, BENNERTZ S, et al. Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging[J]. Remote Sensing, 2014, 6(11): 10395-10412.
[21] 牛庆林,冯海宽,杨贵军,等. 基于无人机数码影像的玉米育种材料株高和 LAI 监测[J]. 农业工程学报, 2018, 34(5): 73-82.
[22] 杨寿勇,张海阳,李 成,等. 基于卷积神经网络模型的微藻种类识别[J]. 环境科学与技术, 2020, 43(S2):158-164.
[23] 傅隆生,冯亚利,TOLA E,等. 基于卷积神经网络的田间多簇猕猴桃图像识别方法[J]. 农业工程学报, 2018, 34(2): 205-211.
[24] HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]. Las Vegas, America: IEEE,2016: 770-778.
[25] HUANG G, LIU Z, MAATEN L V D, et al. Densely connected convolutional networks[C]. Honolulu, America: IEEE, 2017.
[26] XIE S, GIRSHICK R, DOLLAR P, et al. Aggregated residual transformations for deep neural networks[C]. Honolulu, America: IEEE, 2017.
[27] TAN M, LE Q V. EfficientNet: Rethinking model scaling for convolutional neural networks[C]. Long Beach, America: ICML, 2019.
[28] ZHANG X, ZHOU X, LIN M, et al. Shufflenet: an extremely efficient convolutional neural network for mobile devices[C]. Salt Lake City, America: IEEE/CVF, 2018.
[29] 謝 军,江朝晖,李 博,等. 基于二次迁移模型的小样本茶树病害识别[J].江苏农业科学,2021,49(6):176-182.
[30] 刘翱宇,吴云志,朱小宁,等. 基于深度残差网络的玉米病害识别[J].江苏农业学报,2021,37(1):67-74.
(责任编辑:陈海霞)
收稿日期:2021-09-09
基金项目:国家重点研发计划项目(2017YFB1302401);湖北省教育厅中青年人才项目(Q20201409)
作者简介:李 婕(1984-),女,湖北宜昌人,博士,主要从事计算机视觉研究。 (E-mail)jielonline@163.com。李毅为共同第一作者。
通讯作者:乔江伟,(E-mail)qiaojiangwei@caas.cn
