基于神经网络的多四旋翼保性能编队控制
2022-07-09曹志斌邵星灵杨卫康新晨
曹志斌, 邵星灵, 杨卫, 康新晨
(1.桂林航天工业学院电子信息与自动化学院, 桂林 541004; 2.中北大学仪器科学与动态测试教育部重点实验室, 太原 030051)
四旋翼无人机以其灵活的运动性能、简单的硬件结构和较低的维护成本等特点受到了国内外诸多研究机构的青睐[1-2]。在单四旋翼性能优势的基础上,多四旋翼无人机协同编队飞行执行任务可通过整合各四旋翼的性能特点,达到优势互补协同性能超越的效果,因此被广泛应用于军事和民用领域,如航空摄影[3]、目标搜索[4]和灾害救援[5]等。多四旋翼协同编队控制是多智能体系统协同控制理论的重要应用实例之一。然而,四旋翼无人机动力学系统具有高不确定性、欠驱动、强耦合和多输入多输出等特点[6-7],在实际应用中四旋翼的空气动力学参数受限于测量仪器的测量精度而无法精确获得,给模型带来了一定的参数不确定性[8];此外,作为四旋翼无人机控制的基础环节,姿态控制在四旋翼飞行过程中不可避免地遭受外界扰动的影响[9-10],都给四旋翼编队控制器的设计带来很大挑战。
目前,多无人机编队控制方法主要有领航-跟随法[11]、行为控制法[12]和虚拟结构法[13]等,其中领航跟随法以其良好的控制性能被广泛采用[14-18]。针对具有非线性不确定干扰的多四旋翼无人机编队控制问题,文献[14]提出了基于神经网络的有限时间双层领航-跟随编队控制方法。文献[15]利用积分反步的设计方法构造了多无人机分布式领航跟随编队滑模编队控制器。文献[16]考虑四旋翼无人机位置、姿态环受外界干扰问题,结合反步控制方法和鲁棒补偿原理设计了四旋翼无人机鲁棒编队控制器。基于领航跟随编队控制框架,文献[17]在二维平面下设计了多四旋翼无人机内外环鲁棒自适应编队控制器,可实现多无人机在干扰环境下的稳定编队飞行,同时降低了编队控制系统时间延迟。针对具有模型不确定非线性干扰的多四旋翼无人机分布式编队控制问题,文献[18]结合反步控制和动态面技术设计了基于神经网络干扰观测器的分布式编队控制协议,避免了控制器的微分爆炸和代数环问题。
针对多四旋翼编队飞行过程中存在的外部环境干扰和参数不确定导致编队系统稳定性不足、暂稳态性能不佳的问题,设计可实现快速平滑干扰估计与补偿的多四旋翼无人机分布式神经网络协同编队控制方法。解决多四旋翼在干扰环境下编队的位置保持控制和姿态跟踪控制问题,确保一致性编队同步误差能够按照预先设定的收敛速度、超调量及稳态精度收敛至期望的区域,同时满足系统预先设定的瞬态性能和稳态精度;构造最小参数学习神经网络干扰观测器实现对未知非线性干扰的光滑快速估计与补偿,同时消除控制回路与神经学习回路的耦合影响,提高多四旋翼系统编队控制的实时性和快速响应能力。
1 四旋翼编队控制问题建模
1.1 四旋翼无人机模型
针对编队飞行过程中存在参数不确定性和环境干扰的多四旋翼无人机协同编队控制问题,建立第i架四旋翼无人机的轨迹回路与姿态回路模型为

(1)
式(1)中:mi为第i架四旋翼无人机的质量;t为编队飞行时间;Gi=[0,0,mig]T;g为重力加速度;Ji=diag{Ji,1,Ji,2,Ji,3}∈R3×3表示一个正定的对角惯性矩阵,Ji,1、Ji,2、Ji,3分别为第i架四旋翼在惯性坐标系下沿x、y、z轴的转动惯量;pi=[xi,yi,zi]T,Θi=[φi,θi,ψi]T分别为第i架四旋翼在惯性坐标系下的位置矢量和在机体坐标系下的姿态角;Πi,1=diag{ki,x,ki,y,ki,z},Πi,2=diag{ki,φ,ki,θ,ki,ψ},为第i架四旋翼的空气阻尼矩阵,ki,r∈R(r=x,y,z,φ,θ,ψ)为第i架四旋翼的空气阻力系数;控制输入ui∈R为第i架四旋翼的拉力;τi=[τi,xτi,yτi,z]T为绕机体x,y,z轴的三个控制力矩;gi,1=[c(ψi)s(θi)c(φi)+s(ψi)s(φi),s(ψi)s(θi)c(φi)-c(ψi)s(φi),c(θi)c(φi)]T表示与姿态相关的位置回路输入矩阵,s(·)与c(·)分别表示正弦函数和余弦函数;矩阵gi,2=diag{li,li,ci}∈R3×3,其中,li是螺旋桨到四旋翼质心的几何距离,ci是力矩系数;di,p(t)=[di,x,di,y,di,z]T表示位置回路中的有界外部干扰;di,Θ(t)=[di,φ,di,θ,di,ψ]T表示姿态回路中的有界外部干扰。
为便于位置控制器和姿态控制器的构造,引入符号定义:
(2)

借助上述中间变量,可将第i架四旋翼无人机轨迹环与姿态环模型[式(1)]改写为严格反馈形式为

(3)
式(3)中:Ui,w表示姿态环各分量的虚拟控制输入。
1.2 多四旋翼无人机通信拓扑与队形
四旋翼编队采用领航-跟随结构,定义领航者是编号为0的节点。四旋翼之间的通信拓扑用无向图G={V,E,A}表示,其中V代表节点集,E代表边集,A[aij]∈Rn×n代表邻接权重矩阵。如果四旋翼i与四旋翼j之间有信息交互,则aij=aji>0,否则aij=aji=0。领航者和从机i之间的连通权重用bi表示,如果第i架从机可以直接获取领航者信息,则bi>0,否则bi=0。
在相对位置坐标系下,第i架四旋翼相对于领航者的位置矢量可以表示为Δi,k,k=1,2,3分别表示x、y、z方向。第i架四旋翼与第j架四旋翼之间的相对位置偏差可以用Δij,k=Δi,k-Δj,k表示。
2 控制器设计
2.1 位置回路跟踪控制器
定义第i架四旋翼的一致性编队同步误差为

(4)
为确保各四旋翼无人机的一致性编队同步误差能够按照预先设定的收敛速度、超调量和稳态误差收敛至期望的性能边界(prescribed performance bounds,PPB)中,设计性能函数


(5)
式(5)中:Zi,pk为转化误差。
根据E(Zi,pk)的性质,有
ei,pk=ρi,pk(t)E(Zi,pk)
(6)
由式(5)可将原受约束的编队误差控制问题转化为无约束系统的误差镇定问题,得到转换误差Zi,pk为

(7)
基于转化后的编队同步误差构造位置环轨迹跟踪控制器为

(8)
为避免控制器设计过程中对虚拟控制量αi,v重复微分导致的“复杂性爆炸”问题,引入动态面控制技术。使αi,v通过如下低通滤波器,得到αi,v的估计量,定义为

(9)
式(9)中:τi,v=diag(τi,v1,τi,v2,τi,v3)为低通滤波器可调参数。
2.2 速度回路神经网络控制器


(10)

基于隐含层的权值估计值构造轨迹回路状态观测器,即
(11)
式(11)中:状态观测器带宽ηi,v=diag{ηi,v1,ηi,v2,ηi,v3}。
基于最小参数学习神经网络和位置回路状态观测器,根据式(10)和式(11),构造位置回路预测神经网络观测器,即
(12)

(13)
由式(13)定义李雅普诺夫函数,即

(14)

(15)
结合神经网络提供的干扰估计以及位置控制律,得到速度跟踪控制律为

(16)
2.3 姿态回路跟踪控制器
结合所建立的第i架四旋翼轨迹回路模型
(17)
对式(17)进行逆动力学解算,可得到期望姿态角指令为

(18)



(19)
设计如下李雅普诺夫函数:

(20)

(21)
结合式(3)四旋翼姿态环模型,设计姿态控制律为

(22)
式(22)中:ki,Ω为姿态回路控制器参数。
定义误差ei,w=Xi,w-αi,w,则有

(23)
构造李雅普诺夫函数:

(24)

(25)
结合神经网络姿态回路干扰估计,得到角速率控制器为

(26)
式(26)中:ki,w为角速率控制器参数。
3 仿真实验
3.1 仿真参数设置
为验证本文控制算法的有效性,在存在参数和外界扰动不确定性的情况下,采用本文设计方法进行多四旋翼无人机编队控制仿真实验。实验过程中四旋翼无人机模型参数选择如表1所示。
为验证多四旋翼协同编队系统的鲁棒性,设置如下外部扰动,即
(27)
(28)
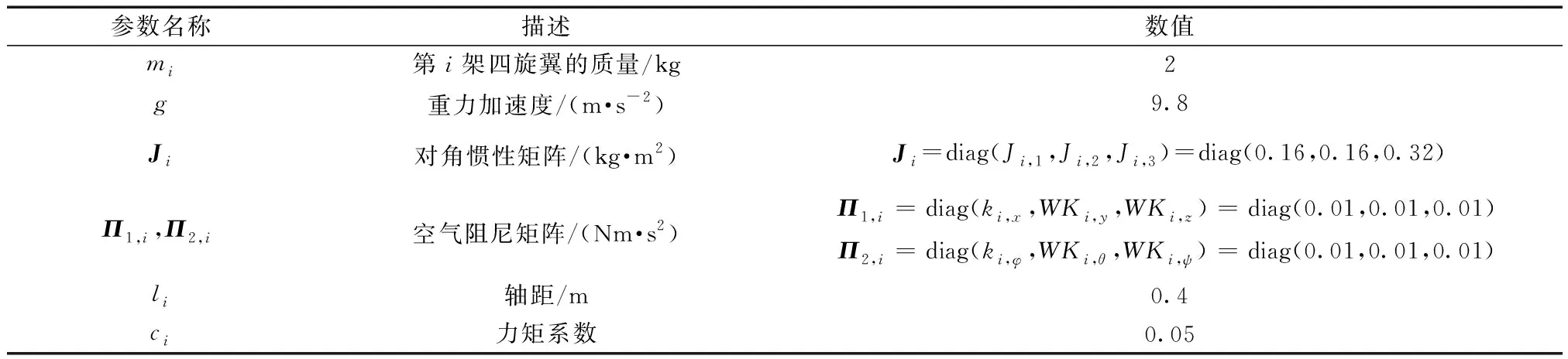
表1 四旋翼无人机运动/动力学模型参数Table 1 Model parameters of quadrotors

仿真实验中,3架四旋翼形成三角形稳固编队,跟踪如下期望轨迹,即
(29)

图1 多四旋翼通讯拓扑和期望编队构型Fig.1 Communication topology and desired formation configuration of multi-quadrotors
3.2 仿真结果及分析
四旋翼无人机自适应神经网络编队控制算法仿真结果如图2~图6所示。图2为3维空间中多四旋翼无人机8字形编队飞行位置响应曲线图,图3为x-y平面下多四旋翼编队飞行轨迹。从仿真结果可以看出,在本文所设计编队控制器作用下,各四旋翼从不同位置起飞形成三角形编队构型后能精确跟踪虚拟领航者的机动轨迹。
为充分展示该四旋翼无人机编队飞行控制器的良好抗干扰能力,图4、图5分别给出了编号为1的四旋翼无人机位置环、姿态环参数和外界扰动不确定性的神经网络干扰观测效果。本文的最小参数学习神经网络观测器可以快速平滑地估计非线性扰动,使多四旋翼无人机可以在干扰环境下持续稳定地遂行编队飞行任务。
图6为各四旋翼无人机一致性编队同步误差响应曲线。在预设性能控制律的作用下,各四旋翼无人机的位置环一致性同步误差可以按照预先设定的收敛速度、超调量和稳态误差收敛到期望的性能边界内,从而确保了多四旋翼无人机编队的快速性和协同飞行的安全性。

图2 四旋翼无人机3维空间运动轨迹Fig.2 Trajectory of quadrotors in 3D space
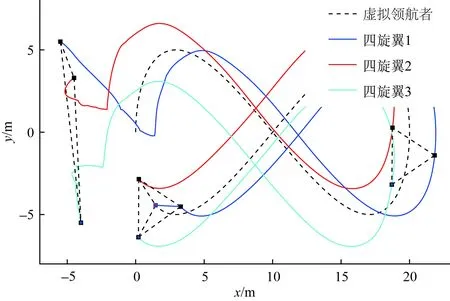
图3 x-y平面下四旋翼无人机运动轨迹Fig.3 Trajectory of quadrotors in x-y plane

图4 四旋翼1位置回路神经网络干扰估计Fig.4 Disturbance estimation of position loop of No.1 quadrotor based on neural network

图5 四旋翼1姿态回路神经网络干扰估计Fig.5 Disturbance estimation of attitude loop of No.1 quadrotor based on neural network
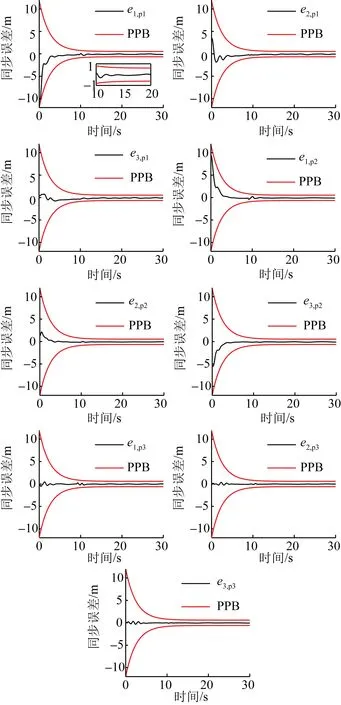
图6 各架四旋翼无人机的编队同步误差Fig.6 Formation synchronization error of each quadrotor
4 结论
针对干扰环境下的多四旋翼无人机稳固编队飞行问题,设计了最小参数学习神经网络观测器,实现对于未知非线性干扰的光滑快速在线估计与补偿。该控制器设计方法消除了控制回路与神经学习回路的耦合影响,借鉴最小参数学习方法仅需对神经网络权值的范数进行更新,降低了神经网络在线学习负担,提高了多四旋翼无人机编队控制的实时性和快响应能力。此外,采用预设性能一致性编队控制协议,可进一步确保编队构型的稳固性。未来工作将进一步考虑对多四旋翼无人机编队飞行通信拓扑变换和通信延迟问题的研究。
