智能仿生假手结构设计与研究
2022-07-07范虓杰邹任玲李成浩覃冬雲胡秀枋
范虓杰,邹任玲,李成浩,覃冬雲,胡秀枋
上海理工大学 健康科学与工程学院(上海, 200093)
0 引言
仿生假手能帮助肢体障碍患者完成日常生活和工作的基本动作要求,具有重要的临床意义[1]。当前国内外仿生假手研究的热点是在紧凑的结构中实现高自由度、灵巧的动作[2]。2016 年,诺维萨德大学设计了一款拇指具有侧摆功能的仿生手,展现出较好的灵活性[3]。2017 年,意大利Controzzi 研发的SSSA-MyHand[4]仅用3 个电机实现了仿生手,具有较好的抓取能力,但无法实现指关节的小范围旋转,限制了抓握空间。2020 年,意大利团队制作的一款包含手部和腕部的仿生手”The Hannes Hand”[5],传动机构采用复杂的欠驱动结构,可以实现90% 的人手功能。我国仿生手起步较晚,比较典型的是东南大学与丹阳假肢厂合作设计的肌电假手,可以通过识别肌电信号完成8 种手势动作,完成动作又快又准[6]。
上述设计在实现仿生手抓握功能时都展现出了较好的性能,但未能实现四指侧摆功能,在进行如手指的夹持和大型物体抓握等功能上受到限制。因此,本研究基于欠驱动结构设计了一款智能仿生假手,在掌指关节处采用连杆传动来实现四指的侧摆运动,在拇指关节处设计了转向机构,增加抓取空间。并通过仿真实验,验证了设计的科学性和合理性。
1 机械结构设计
人类的手由5 块掌骨、14 块指骨和16 个关节构成[7],复杂的结构使其具有高自由度,可以满足日常生活中大多数的功能和手势需求。本研究基于解剖学[8]中的人手指骨尺寸和手指各个关节的运动范围,建立了包括四个手指屈伸机构、拇指机构、四指侧摆机构的仿生手模型(见图1)。

图1 仿生手模型Fig.1 Bionic hand model
1.1 单指屈伸结构设计
拇指外的四根手指(以下简称四指)包括掌指关节、近端指间关节和远端指间关节,通过和韧带与相应肌肉协同配合完成屈曲、伸展等动作[9]。设计其近指尖关节和远指尖关节做耦合运动,通过蜗轮蜗杆的配合传递、齿轮组的传动、连杆机构的运动实现手指机构的屈曲伸展运动,其结构见图2。

图2 食指结构图Fig.2 Structure of the index finger
1.2 四指侧摆结构设计
为实现手指夹持功能,设计四指在掌指关节处耦合,通过四个指根异形连杆机构,实现四指的侧摆功能,其结构见图3。
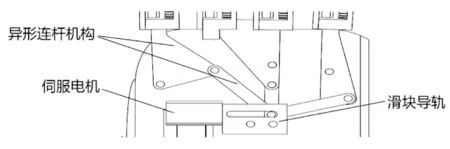
图3 四指侧摆运动结构Fig.3 Structure of swing movement of four fingers
1.3 拇指结构设计
拇指包括第一腕掌关节、掌指关节和拇指之间关节,通过和韧带关联与相应肌肉配合完成屈曲、伸展、外展和内收等动作,使拇指具有很大的活动范围[10]。为实现这一特点,设计了拇指转向机构(见图4),通过滚动轴承的底座与手掌相连,在电机的驱动下,通过滚动轴承内圈的转动实现绕指掌关节处的旋动,通过锥齿轮间的配合带动相连的拇指机构实现拇指的转向,使仿生手具备更好的抓握能力。

图4 拇指转向机构结构图Fig.4 Structure of the thumb stcering mechanism
2 运动学建模及分析
为了验证仿生手的运动效果和设计的合理性,对所设计的仿生手进行运动学建模,求解机械手指的末端位置和姿态,确定其运动轨迹[11]。
2.1 手指屈伸运动学分析
以单个手指为例建立其几何模型,求解手指末端位置P与掌指关节运动角度θ1之间的关系,进一步建立电机位置和手指末端运动的关系,建立单指关节坐标系简图,见图5。以A 点为原点,设AB=L1,BE=L2,DE=L3,PF=L4,FP=L5,FG=L6,PG=L7,CG=L8,B=(L1cosθ1,L1sinθ1),E(L3cosθ2-a,L3sinθ2+b),D=(-a,b)。
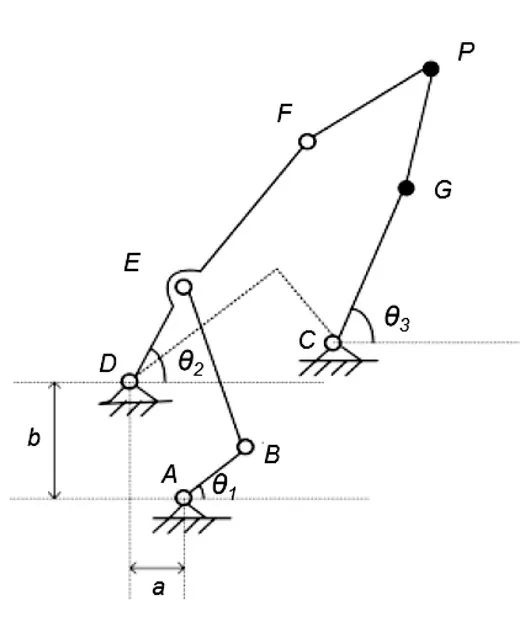
图5 单指关节坐标系简图Fig.5 Coordinate system of single finger joint
首先求解θ2与θ1之间的关系,由|BE|=L2,可得θ1与θ2之间存在:

经计算可求得θ2与θ1之间的关系。接下来求解θ2与θ3之间的关系,设C点坐标为(c,d),G点 坐 标 为(L8cosθ3+c,L8sinθ3+d),F 点 坐 标 为(L4cosθ2-a,L4sinθ2+b),可得θ2与θ3之间存在:

经计算可求得θ2与θ3之间的关系,且进一步可得G点和F点坐标。
接下来求解P点的坐标与θ3的关系,由G点和F点坐标得到

代入各参数,可得到P点的坐标与θ3的关系,再通过联立前式可得P点的坐标与θ1的关系。
2.2 四指侧摆结构运动学分析
本研究中的四指侧摆结构为连杆传动,其中中指设定为固定不动,其余三根手指在异形杆的带动下各自绕支点进行转动。通过建立其几何模型,求解各杆件的转动角度α1,α2,α3,见图6。

图6 四指侧摆运动机构简图Fig.6 Coordinate system of swing movement of four fingers
对食指侧摆运动建立模型。B、C、D点坐标固定,杆件中β1、β2大小为定值,设E(XE,YE),AF=L1,FE=L2,F=(L1cosθ1,L1sinθ1),食指侧摆角度α1满足关系式α1=θ1=Π/2-β1,由|FE|=L2可得

经计算可得θ1,即食指展开角度α1的大小。
对无名指侧摆运动建立模型,异形杆的DG边和无名指所在的EG边垂直,α2为无名指 侧 摆 运 动 角 度。 设G(XD,YG)=(XD+L3cosα2,YDL3sinα2),|DG|=L3,|EG|=L4,可得

经计算可得无名指展开角度α2的大小。
最后对小指侧摆运动建立模型,由机构知小指连接杆上H点固定,α3即小指侧摆运动角度。分别设出各点坐标,设|EQ|=L5,可得

经计算可得小指展开角度α3,再联立各式可求得各手指侧摆运动角度之间的关系。
3 运动仿真
设定仿生手的食指完全展开为初始状态,掌心所对方向为X方向,指尖所指方向为Y方向,将模型导入Adams 软件中,仿真分析手指在做屈伸运动时手指指尖即P点的运动情况。P点在X方向、Y方向上各自的位移曲线及角速度曲线见图7。
由图7 可知,位移曲线表现圆滑基本没有波折,角速度曲线没有出现突变及尖点,结果说明其在运动过程中十分稳定,能够较好完成屈伸运动。
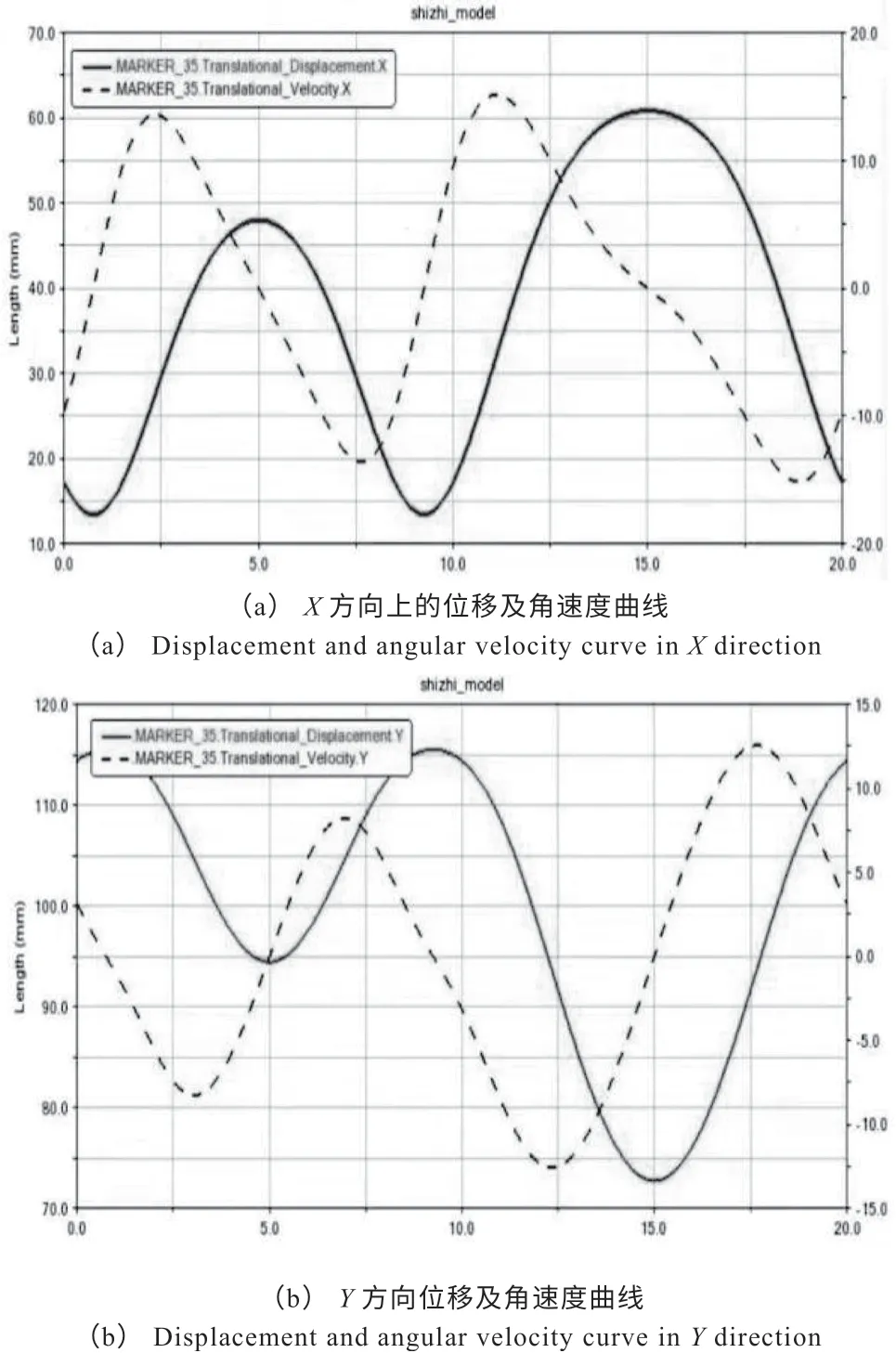
图7 单指屈伸运动分析Fig.7 Analysis of single finger flexion and extension movement
根据前面推导的四指侧摆结构的数学模型,代入各连杆的长度,在Matlab 软件中进行计算,得到各手指的单次侧摆角随时间变化的曲线,其结果见图8。其中,食指侧摆角0~10°,无名指侧摆角0~15°,小指侧摆角0~43°,基本符合手指抓握时的状态。

图8 各手指侧摆角度仿真Fig.8 Simulation of angle of swing movement of each finger
4 结语
本研究主要设计了一款可以实现更多抓握功能和更大抓握空间的智能仿生手。通过运动学分析,仿真结果表明手指机构在运动过程中十分稳定,能够很好地完成屈伸运动;仿生手各手指做侧摆运动随时间变化能达到的角度范围符合人手结构特征及工况。仿真结果证明了本研究所设计结构的合理性,更为后续的相关研究及应用提供参考。
