虹鳟(Oncorhynchus mykiss)鱼体水动力学特性研究
2022-07-07闫文彦黄六一李玉岩邬骞力尤鑫星
闫文彦,黄六一,李玉岩,王 刚,邬骞力,尤鑫星
(中国海洋大学水产学院,青岛 266003)
鱼类在游动过程中与流体产生非常复杂的相互作用[1]。鱼类会借助侧线等器官感觉周围流体的变化,通过身体的自主摆动克服水流作用,以保持合适的鱼体姿态和游泳速度[2-7]。在此过程中鱼会消耗大量的能量,从而对其生存和生长产生重要影响[8-9]。研究鱼体的水动力学特性,对了解鱼类与水域环境的适应性、个体行为和集群特性、养殖技术和装备开发以及仿生学具有重要的意义。
目前国内外学者对于鱼体自身的肌肉运动、推进机理、游泳能力等方面开展较为丰富研究。Walters等[10]探究了鲭科鱼类的身体形态和游泳性能;周仕杰等[11]对几种幼鱼曲线游泳能力进行了比较研究;Altringham等[12]研究了在模拟游泳条件下肌肉力量的体外输出模式;Liao等[13]比较了虹鳟在不同直径圆柱体后方的游泳状态和在自由水流中的游泳状态,发现鱼类可以从环境产生的漩涡中获取能量,以维持其原有的位置;Liao等[14]从能量的角度解释了采用卡门步态游泳的鳟鱼的神经肌肉控制;Lauder等[15-16]分析了鱼类游泳的几种波动推进的经典模式;乔晓冬等[17]分析了鱼类游动时反卡门涡街的形成和鱼体推力的产生机理,结果表明,反卡门涡街的形成是鱼体游动时产生推力的根本原因;周澍欣等[18]针对鲤鱼的三维模型进行了数值模拟计算,对其水阻力情况、流场流速分布和压力分布情况进行分析;Michele等[19]通过模拟肌肉功能来重现鱼体游泳的主要特征,比较了不同游泳步态的性能,得到了频率、波长、尾振幅等关键参数与所达到的游泳速度或产生的推力之间的关系,从而获得其游泳性能;田晓洁等[20]针对仿金枪鱼三维模型的流场受力进行对比研究,得到仿生机器鱼可有效减少其水阻力,从而提高推进效率;王猛等[21]从亚科层面对中国鲤科鱼类游泳能力进行了分析和总结;李明昊等[22]构建了仿生虎鲸直行和转弯运动负载可靠性分析的状态函数,分析了仿生虎鲸的尾鳍设计变量对载荷的影响。之前大多数研究重点关注的是不同鱼类的游泳模式与推进效率关系,为相关仿生学装备设计提供服务。随着野生渔业资源的衰退,人类通过养殖鱼类,获取高质量蛋白质,已成为渔业的重要产业模式。养殖鱼类自身的水动力特性与养殖水域的流速、能量消耗和养殖效率以及养殖技术和装备设计密切相关,而目前针对鱼体自身的水动力学特性的研究较少。
虹鳟呈纺锤状,体略侧扁,因其肉质蛋白含量高、胆固醇含量极低,具有很高的食用价值、保健价值及可期的市场前景[23-25],已成为中国水产养殖的重要品种之一,是黄海冷水团深远海大型钢结构网箱主要冷水鱼养殖品种之一。
本研究以虹鳟为研究对象,依据其鱼体特征参数构建虹鳟三维模型,使用数值模拟方法探究虹鳟在不同流速和冲角下的水动力特性、流场流速分布以及鱼体表面压力分布,并通过水槽试验验证。研究结果可为虹鳟的个体和群体行为、养殖水域的选择、养殖技术和装备开发以及仿生学研究提供参考。
1 材料与方法
1.1 虹鳟模型
预试验发现小体长单个虹鳟模型在水流作用下的受力很小,仪器测量误差对结果会产生较大影响。本研究选取大规格虹鳟(全长为84.22 cm,标准体长78.00 cm,体质量6.80 kg),全长和体质量参考《中国鲑鳟鱼养殖》[26];体长、体高、头长、体宽之间的关系参考李思忠等[27]对虹鳟的研究结果进行换算;除尾鳍外,其他部位鱼鳍厚度较小,3D打印较难实现,参照相关研究[20],忽略其他鱼鳍。模型基本参数见表1。
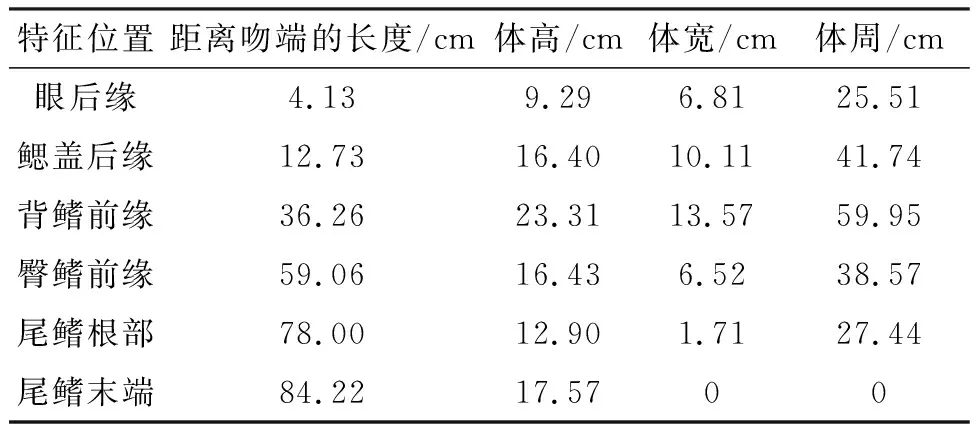
表1 虹鳟鱼模型基本参数Tab.1 Basic parameters of rainbow trout model
使用SolidWorks软件构建1∶1的虹鳟鱼体数值模型(图1a),利用3D打印制作物理模型(图1b)。3D打印材料选择1.75 mm的聚乳酸(PLA),打印精度为层高0.1 mm,壁厚1.0 mm。

图1 虹鳟模型示意图Fig.1 Schematic of rainbow trout model
1.2 模型试验
1.2.1 仪器设备
模型试验在中国海洋大学循环动力水槽中进行,水槽观察段尺寸为4.0 m × 1.0 m × 1.2 m;利用小威龙vectrino点式流速仪测定试验流速,量程0~2 m/s,精度± 0.5%;稳定流速范围0.2~0.7 m/s;通过六分力仪传感器测量试验过程中鱼体受到的水动力,量程0~50 kg,精度± 0.3%。
1.2.2 试验布设
试验布设如图2所示,X方向沿水流方向,Y方向与水槽侧壁垂直,Z轴垂直向上;通过两根细螺纹杆(直径d=10 mm)将虹鳟模型固定在六分力仪上,六分力仪处于观察段中部,鱼体中心线(吻端A尾鳍中心B的连线)距水面28 cm。鱼体头部的朝向-X方向。试验水温为20℃。鱼体中心线所在的水平面为鱼体中心平面,作为后续研究流场分布的参考面。
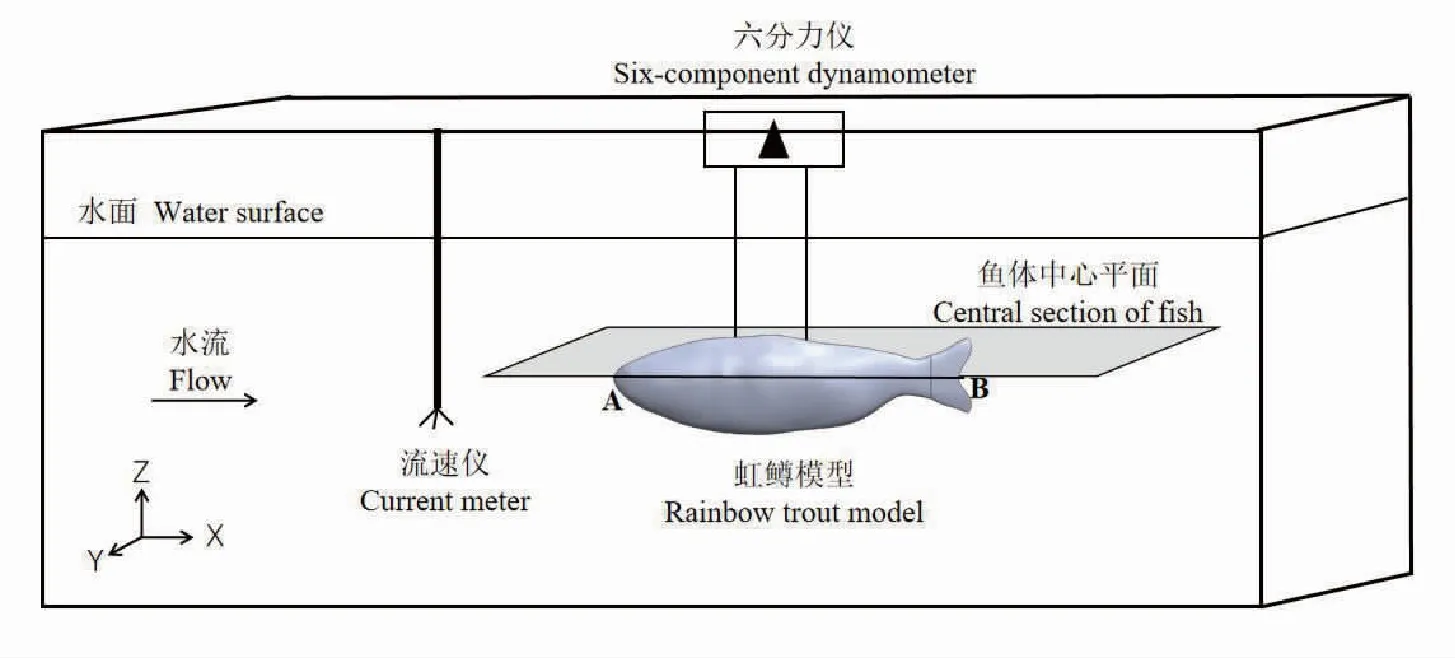
图2 试验布设图Fig.2 Experimental layout diagram
1.3 数值模拟
1.3.1 湍流模型
对于复杂几何的外部流动的问题,常采用基于雷诺平均N-S(RANS)方程组的k-ε模型。其控制方程为:
(1)
(2)
式中:Ui表示i方向的滤波速度;uj表示j方向的滤波速度;P表示滤波压力;ρ表示流体密度。
本研究使用Realizablek-ε模型,可以在雷诺应力上保持与真实湍流的一致[28,29]。Realizablek-ε模型优化了湍流粘度公式,从涡量扰动量均方根的精确输运方程推导出ε方程。
Realizablek-ε模型的湍动能及其耗散率输运方程为:
(3)
(4)

在上述方程中,Gk表示由于平均速度梯度引起的湍动能产生,Gb是由浮力产生的紊流动能;ym可压速湍流脉动膨胀对总的耗散率的影响。C2和C1ε是常数,σk,σε分别是湍动能及其耗散率的湍流普朗特数,在 Fluent中,作为默认值常数,C1ε=1.44,C2=1.9,σk=1.0,σε=1.2。
1.3.2 计算域和边界条件
本研究使用的计算软件为ANSYS 2021版中的Fluent模块。计算域与试验水槽观察段尺度一致,设置为长度L=4.0 m、宽度W=1.2 m、高度H=1.0 m。虹鳟鱼模型在计算域中的布设位置与模型试验的布设相同。
流体选为20℃下等温不可压缩水流,利用压力-速度分离求解器(Semi-Implicit Method for Pressure Linked Equations-Consistent,SIMPLEC)开展稳态计算。重力加速度为9.8 m/s2。计算域左侧为速度入口边界条件,右侧为压力出口边界条件,其余为对称壁面边界条件(图3),确保计算域侧面边界不会对鱼体水动力分布产生无关干扰。N-S方程(式2)的对流项和扩散项在空间上的离散利用二阶迎风格式。收敛标准设置为1×10-4,迭代计算步数为1 000步。
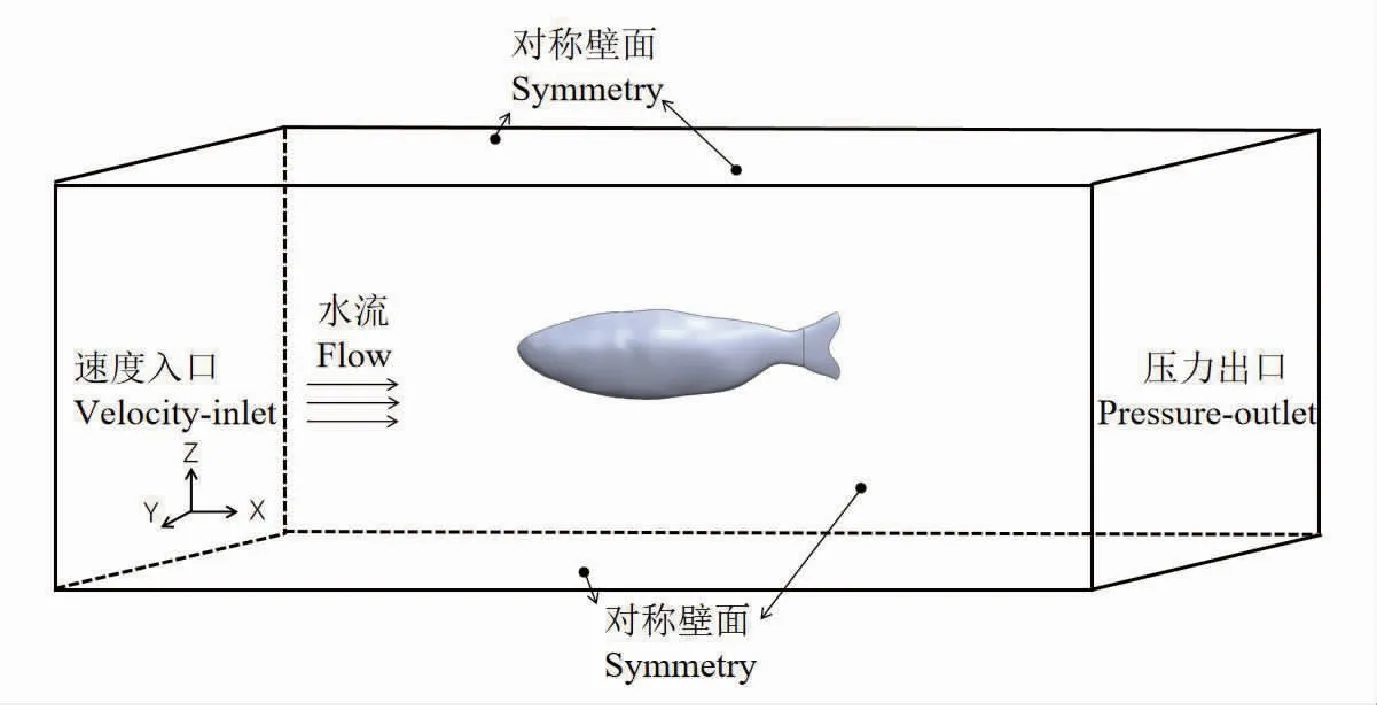
图3 计算域及边界条件Fig.3 Calculation domain and boundary condition
作为数值计算中的重要环节,网格的质量直接影响模拟结果的准确性。一般在数值仿真计算中采用的网格包括结构化网格和非结构化网格,非结构化网格具有网格生成速度快、质量好、数据结构简单等优点。本研究采用的非结构化网格以六面体单元为主,利用Poly-Hexcore网格划分方法(图4),在鱼体边缘使用多面体网格与六面体网格实现共节点连接,以达到提升求解效率与精度的目的[30-33]。考虑到计算精度和计算资源的平衡,本研究划分了5种网格进行网格无关性检验[34-36]。图5表示0°冲角下0.4 m/s时鱼体阻力系数随着网格数的变化。由图5可知,当网格数量达到314万后,随着网格数量的增加,阻力系数基本保持不变。综合考虑目前计算机能力和计算精度要求,计算中保证网格数量大于314万,根据不同的计算工况,实际使用的网格数量均处于400~500万之间。
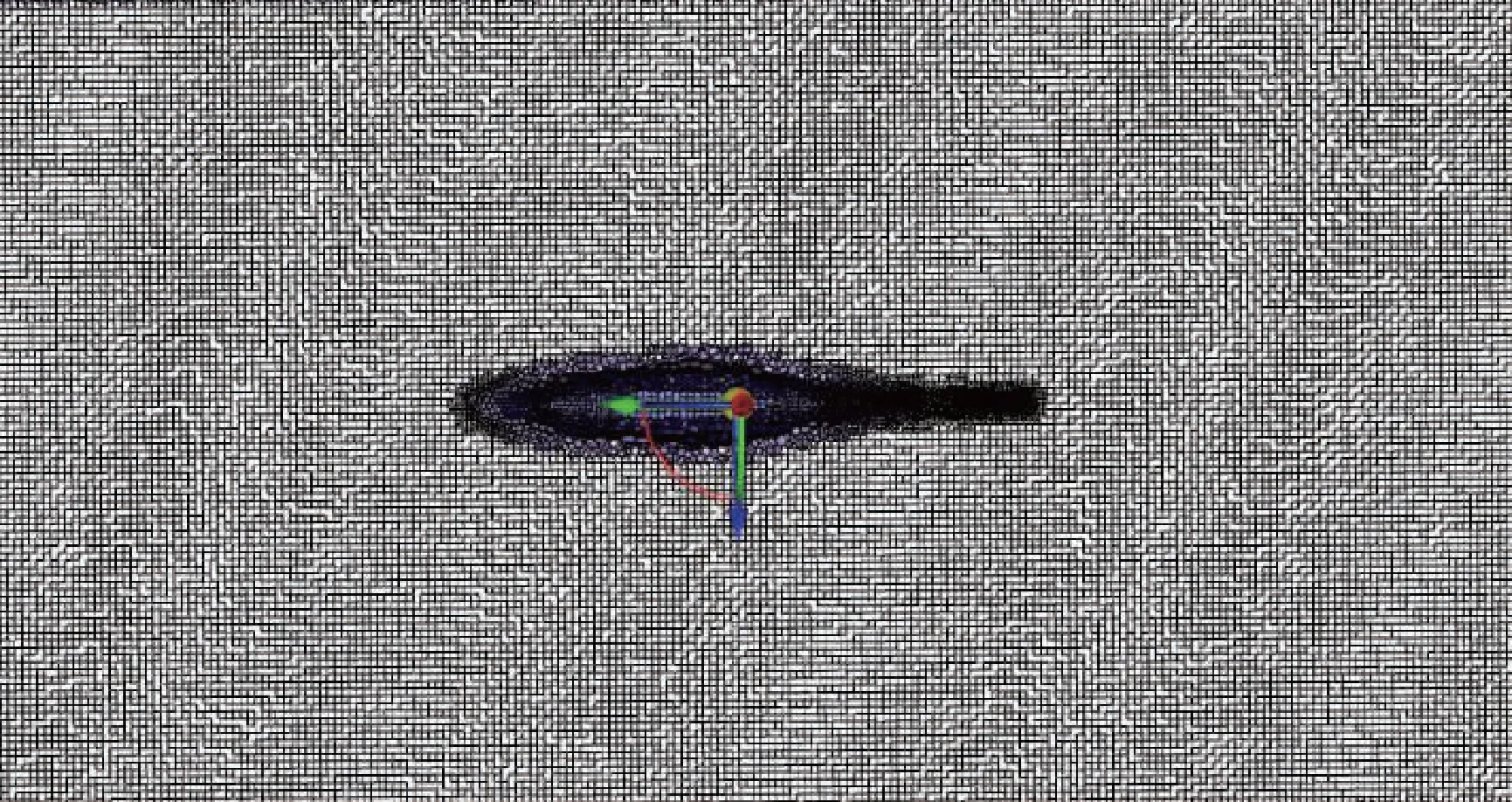
图4 网格示意图Fig.4 Overview of the grids
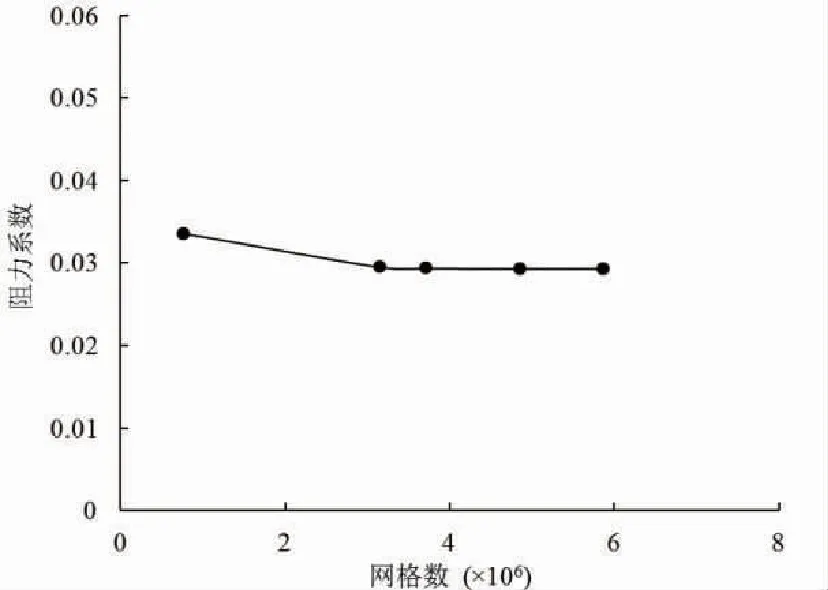
图5 网格无关性验证Fig.5 Mesh independence verification
1.4 工况设置
根据虹鳟的游泳速度、黄海冷水团常规流速以及水槽稳定流速范围,选取试验流速为0.2~0.7 m/s,以0.1 m/s为间隔。冲角设定为来流方向与鱼体中心线所在的纵向中剖面的水平夹角。将5条体长约19 cm的虹鳟放在水槽中试验,从水槽顶部拍摄的图像,获取虹鳟在水流中投影线与来流方向的最大夹角为41.8°(图6)。数值模拟时的冲角范围据此设置为0°~45°范围,以5°为间隔。

图6 虹鳟游动过程中鱼体与水流的冲角Fig.6 The attack angle between the fish body andthe current during the swimming of therainbow trout
在水槽中保持鱼体冲角15°,测定不同来流速度下的鱼体所受水阻力,与数值模拟结果进行对比验证。在数值模拟验证时,为方便对照,将水槽试验固定模型的2根螺纹细杆一并设置在数值模型中,以减少误差。在数值方法得到验证基础上,利用数值模拟方法开展所有工况的计算。
1.5 数据处理方法
鱼体的阻力系数、侧向力系数和雷诺数计算公式如下:
(5)
(6)
(7)
式中:Fx—水阻力,N;Fy—侧向力,N;Cx—阻力系数;Cy—侧向力系数;Re—雷诺数;ρ—水介质密度,取998.3 kg/m3;S—受流面积(鱼体沿体长方向的中心截面),m2;U—入流速度,m/s;d—特征长度(体长),m;v—水的运动黏性系数(20℃水的运动黏性系数为1.006×10-6m2/s)。
对监测点速度无量纲处理,计算公式如下:
(8)
式中:K—速度比;Ui—速度场中任意点的速度;U—来流速度。
2 结果分析
2.1数值模拟与水槽试验结果验证
图7为15°冲角时虹鳟鱼体水阻力实验值与数值模拟结果的对比。由图7可以看出,模型试验和数值模拟得到的阻力曲线趋势一致,均呈幂函数关系。在流速0.2~0.6 m/s时较为接近,流速0.4 m/s时相对误差为2.56%,0.7 m/s时,相对误差为14.02%。由此表明,本文采用的数值模拟方法具有较高的计算精度,能够满足后续的研究要求。
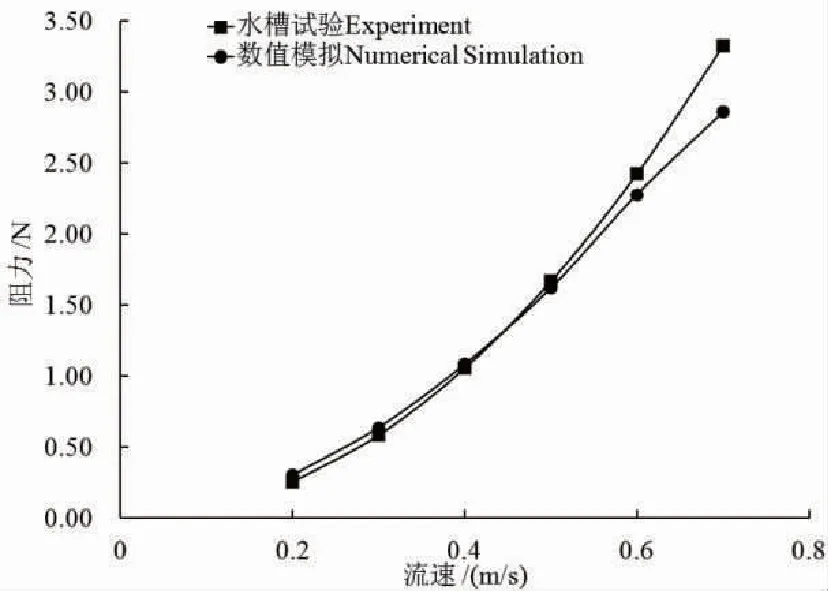
图7 15°冲角时虹鳟鱼体水阻力实验值 与数值模拟结果的对比Fig.7 Comparison of experimental and numerical resultson drag of rainbow trout at 15°
2.2 鱼体水动力特性
2.2.1 水动力系数
鱼体的阻力系数、侧向力系数与雷诺数关系如图8和图9所示。不同冲角条件下,阻力系数Cx和侧向力系数Cy随着雷诺数增大基本保持不变。表明雷诺数在1.6×105~5.8×105区间时,同一冲角条件下,水动力系数处于“自动模型区”。
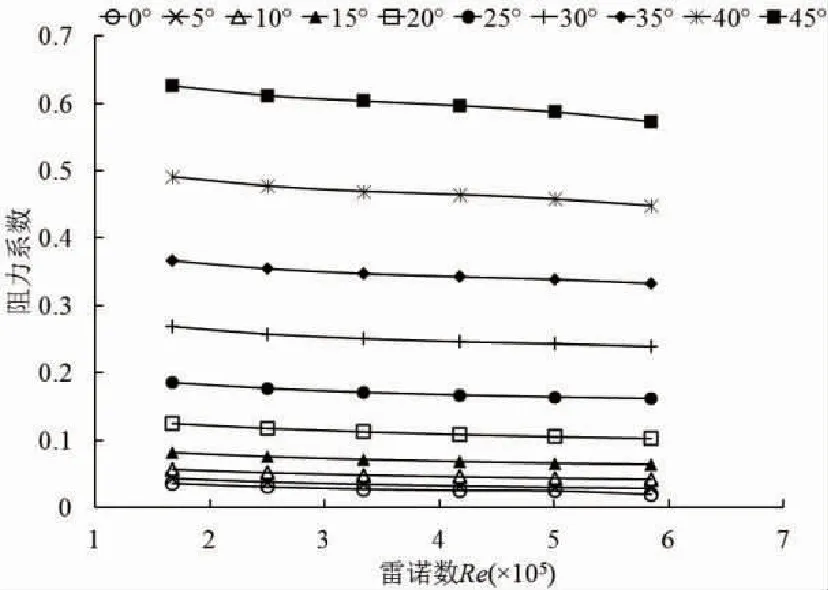
图8 阻力系数Cx与雷诺数Re的变化关系Fig.8 Relationship between drag coefficient and Reynolds number
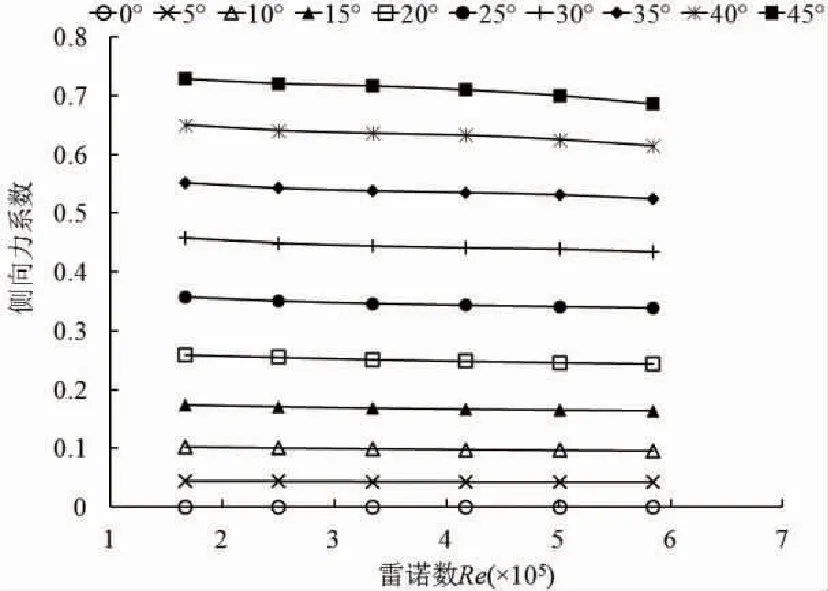
图9 侧向力系数Cy与雷诺数Re的变化关系Fig.9 Relationship between side force coefficientand Reynolds number
由于在试验范围内,在同一冲角条件下,阻力系数和侧向力系数基本不变,采用阻力系数和侧向力系数平均值得到图10为阻力系数和侧向力系数与冲角关系曲线。由图可知,在0°~45°冲角范围内,阻力系数Cx随着冲角(α)增大呈现指数增长趋势,其关系式为Cx=0.025 2 e0.073 1α(R2=0.994 6);侧向力系数Cy随着冲角(α)的增大而呈现线性增长,其关系式为Cy=0.015α(R2=0.977 8)。
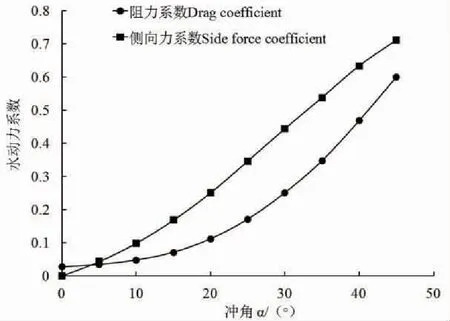
图10 水动力系数与冲角的关系Fig.10 Relationship between hydrodynamic coefficientand inclinations
2.2.2 鱼体周围速度场特性
本研究取吻端与尾叉最深点连线所在的水平面为参考面(见图2,鱼体中心平面),探究该平面上的速度分布。将鱼体周围流速大于来流速度(无量纲流速大于1)的区域定义为高流速区,低于来流流速(无量纲流速小于1)的区域定义为低流速区。图11显示了20°冲角时不同流速下鱼体中心平面周围无量纲流速分布。
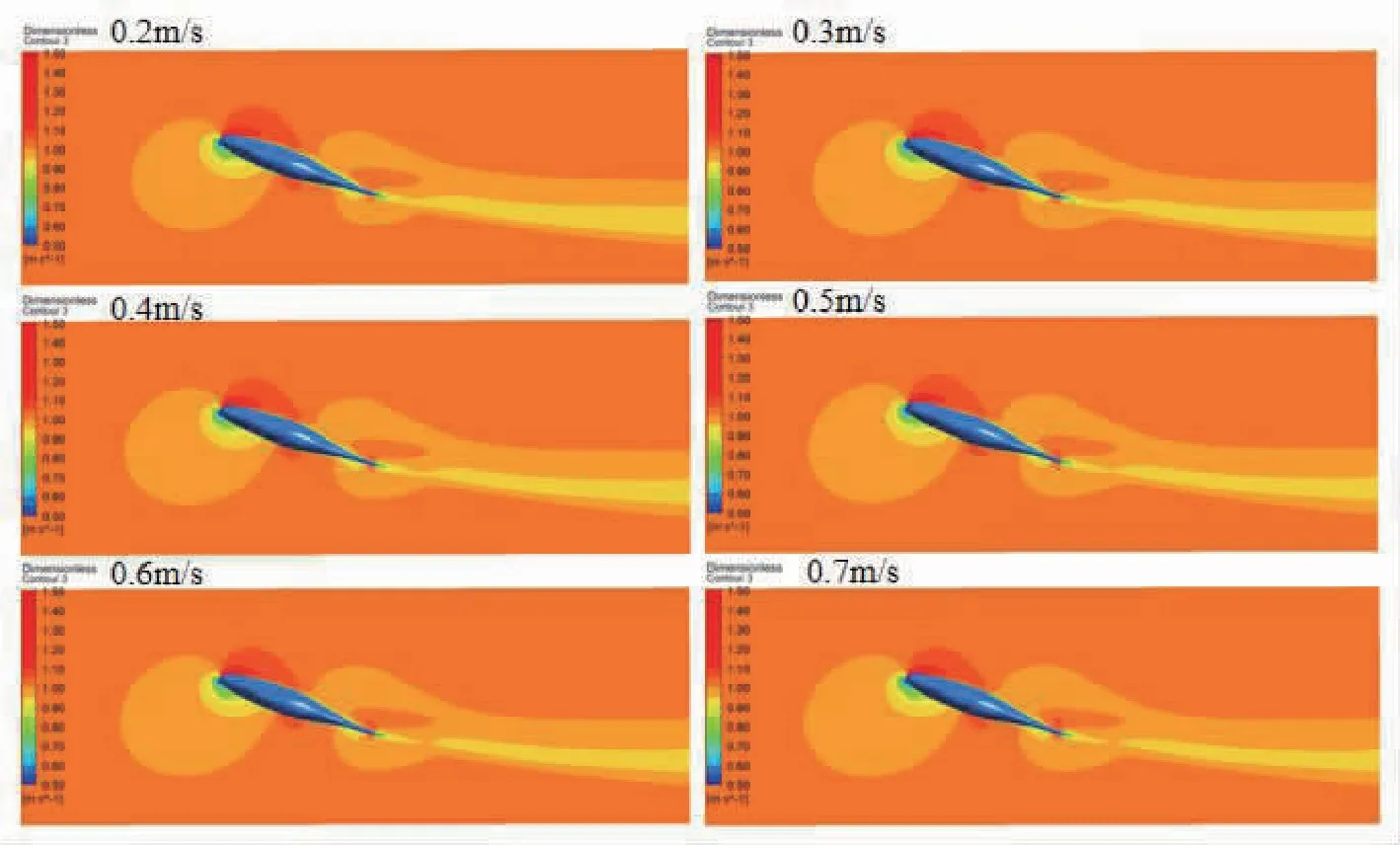
图11 20°冲角时不同流速下鱼体中心平面周围流场图Fig.11 Velocity fields around the fish center plane at different velocities at 20°
由图可知,当冲角固定时,不同流速下高流速区和低流速区分布趋势基本一致,因此,下文以0.6 m/s为例说明由于冲角的变化而引起的速度场变化情况。
不同冲角、流速0.6 m/s时,鱼体中心平面周围流场分布如图12所示。由图12可知,在0°冲角时,鱼体左右两侧流速对称分布,在鱼体最宽处流速最大,形成两侧的高流速区;头部吻端和尾部附近流场流速较小,在头部前端形成圆形的低流速区,沿尾柄形成长条形低流速区。在冲角0°~15°时,迎流面高流速区出现于鱼体最宽处到鱼尾之间,说明冲角和鱼体结构曲率对表面的流速分布具有协同影响。随着冲角的逐渐增大,鱼体背流面的高流速区逐渐向头部前端移动,迎流面高流速区呈现逐渐缩小的趋势,在0°冲角时,迎流面高流速区占鱼体中心平面面积的2.30%,当冲角达到15°时,迎流面高流速区面积比例下降至1.14%。当冲角大于15°时,背流面高流速区形态在鱼体头部稳定后,鱼体尾鳍两侧开始逐渐形成影响范围较小的高流速区,随着冲角的增大而增大,并沿着背流面逐渐从尾鳍尖端向躯干移动。这可能是由于边界层在鱼体头部的背流面附近产生分离之后,鱼体最宽处到鱼尾之间曲率的变化导致了局部高流速区的产生。当冲角达30°时,迎流面高流速区消失。在冲角0°~45°时,迎流面低流速区随着冲角增大而逐渐扩大,并由鱼体前部吻端位置向后扩散,尾部迎流面低流速区随着冲角增大而前移,最终低流速区覆盖整个迎流面。周澍欣等[18]对鲤鱼的三维模型进行了数值模拟探究,其流场结果与本研究一致,符合纺锤形鱼体周围流场的实际情况。

图12 不同冲角下鱼体中心平面周围流场分布图Fig.12 Velocity fields around the fish center plane with varying inclinations
2.2.3 鱼体表面压力分布
流速0.6 m/s,不同冲角条件下,鱼体表面压力分布如图13所示。0°冲角时,由于对称于来流方向,鱼体迎流面和背流面的压力分布一致,负压集中在体宽最大处。负压是由于鱼体的特定体型造成的结果,这与上节中流体流经鱼体体宽最大处时,两侧区域形成高流速区的结果相吻合,也与田晓洁等[20]对仿金枪鱼的研究结果一致。
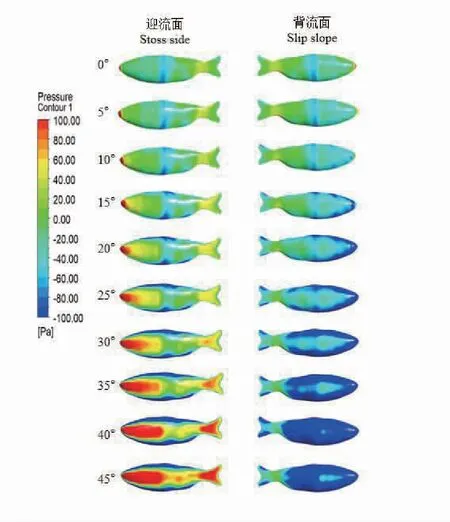
图13 不同冲角条件下鱼体表面压力分布云图Fig.13 Surface pressure distribution nephogram offish with varying inclinations
鱼体迎流面正压区在冲角小于20°时,主要集中在头部和尾部,当冲角大于20°时,迎流面正压区逐渐贯穿至整个躯干侧面。随着冲角的增大,迎流面上的负压区域逐渐减少,负压区逐渐向背、腹方向偏移。迎流面上的正压区随着冲角的增大逐渐增大,冲角0°时,正压区占迎流面的23.90%,当冲角达到45°时,迎流面的71.66%均为正压区。在冲角0°~20°时,鱼体最宽处到鱼尾之间由于其曲率的变化,压力幅值逐渐减小,而上文中迎流面高流速区同样出现于鱼体最宽处到鱼尾之间,这说明鱼体表面的速度分布和压力分布息息相关,符合伯努利原理。
鱼体背流面正压区在冲角小于10°时,只存在于鱼体头部和尾柄部位,正压区在鱼体背流面的占比大于16.89%,当冲角大于10°时,头部正压区消失,尾柄部位正压区随着冲角的增大而减小,但在任意冲角条件下均为正压,这也可以通过对照尾端速度的分布得到印证,当冲角达到45°时,背流面上正压区仅有1.35%。鱼体背流面负压区在0°到15°冲角范围内,随着冲角的增加从最大体周处开始向头部扩散,当冲角大于15°时,鱼从鱼体头部开始,以鱼体标准体长(L)为基准,提取鱼体中心平面上的体表不同位置(0.1 L、0.25 L、0.5 L、0.75 L和0.9 L)的压力数据(图14和图15),分析迎流面和背流面上鱼体表面的压力变化规律。由图可知,随着冲角的增大,迎流面表面压力整体上均呈上升趋势;从鱼体位置角度分析,0.25 L之前(鱼体头部)以及0.9 L位置(尾柄),在所有冲角条件下,表面压力整体上处于正压力作用,其中,0.1 L处表面压力均为最大,说明鱼体头部受到的表面压力最大,最大压力出现在冲角30°时,最大值约为194.22 Pa;从冲角的角度分析,冲角25°~45°,各个部位压力均为正压,除尾柄位置外,各位置压力基本上随着冲角的增加而增加,与图13中的压力分布云图相一致。背流面表面压力整体上随着冲角的增加呈线性下降趋势;冲角30°之后,各个部位表面压力均为负压,其中,头部的压力变化最大,由0°冲角的正压102.31 Pa,下降至负压-345.91 Pa。所有冲角条件下,0.9 L位置(尾柄)的压力在0 Pa附近,变化不大,与图13的压力云图相吻合。
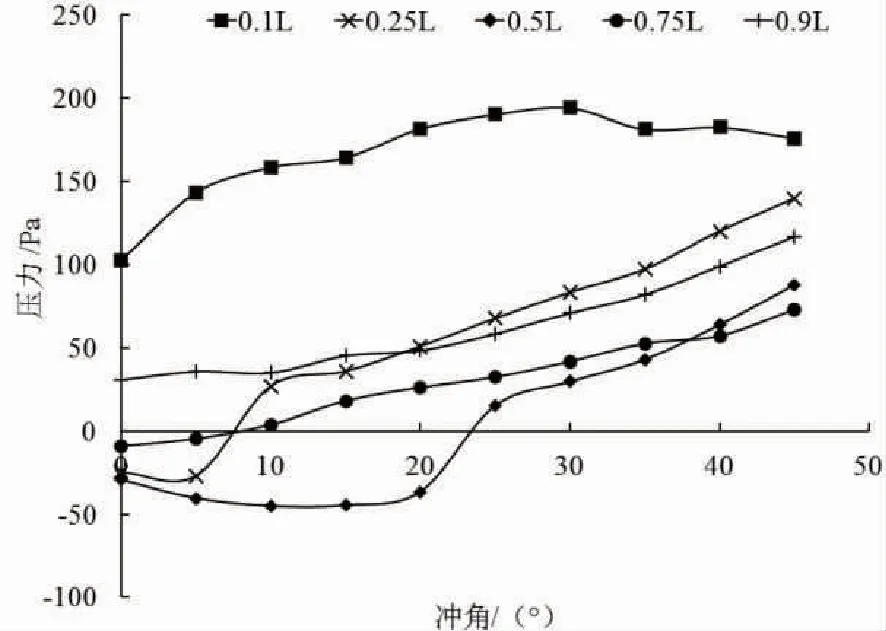
图14 迎流面鱼体不同部位的压力变化Fig.14 The pressure in different parts of the fish bodychanges with varying inclinations in stoss side

图15 背流面鱼体不同部位的压力变化Fig.15 The pressure in different parts of the fish bodychanges with varying inclinations in slip slope
3 结论
本研究依据虹鳟鱼体特征参数,构建虹鳟鱼三维模型,在数值模拟和水槽试验验证的基础上,利用数值模拟方法探究了虹鳟个体在不同流况下的水动力特性、鱼体中心平面周围速度场分布以及鱼体表面压力分布情况。在试验流速(0.2~0.7 m/s)范围内,处于同一冲角条件下时,鱼体水动力系数均处于自动模型区范围内;在0°~45°冲角范围内阻力系数Cx随着冲角增大从0.027增大至0.599,呈现指数增长趋势,侧向力系数Cy随着冲角的增大而呈现线性增长,最大达到了0.71;由于虹鳟鱼体本身的体型特征,随着冲角的增大,速度场中高流速区和低流速区呈现一定的移动规律,随着冲角的增大,鱼体迎流面高流速区呈现逐渐后移并缩小的趋势,背流面的高流速区逐渐向头部前端移动,背流面高流速区形态在鱼体头部稳定后,鱼体尾鳍两侧开始逐渐形成影响范围较小的高流速区,随着冲角的增大而增大,并沿着背流面逐渐从尾鳍尖端向躯干移动,说明冲角和鱼体结构曲率对鱼体周围的流速分布具有协同影响;鱼体结构与表面的压力分布密切相关,对于鱼体的迎流面而言,表面压力在不同位置上整体呈上升趋势,其中鱼体头部受压最大(最大值可达194.22 Pa);对于背流面而言,背流面表面压力整体上随着冲角的增加呈线性下降趋势,其中,头部的压力变化最大(102.31~-345.91 Pa)。以冲角的变化替代鱼体的摆动,忽略鱼鳍对鱼体水动力学特性可能带来的影响,此外鱼体表面不同位置压力分布和变化规律与鱼体形状密切相关,需要在今后开展更为深入的研究。
□
