基于变论域的无人艇航向模糊控制策略
2022-07-05刘志强钱同惠
刘志强,叶 曦,钱同惠
(江汉大学 智能制造学院,湖北 武汉 430056)
0 引言
无人水面艇(unmanned surface vehicle,USV)被广泛应用于军事侦察、国土安全、水质检测、海域探索等方面,近年来越来越受到研究人员的关注[1-5]。然而,USV 具有非线性、不确定性和时变等特点[6],受环境扰动影响较大[7-8],不可避免地会导致航向角误差和方向舵的频繁调节。因此,对USV 航向控制策略的研究有重要的价值和意义。
国内外学者已对USV 航向控制策略做了大量研究,诸如经典PID、Backstepping、滑模控制、神经网络控制、模糊控制等,其中,PID 控制最常应用于船舶,而该方法存在参数整定困难的问题,诸多学者采用了智能控制策略。文献[9]考虑船舶系统的不确定性和非线性,提出了模糊控制策略,引入增益调度和遗传算法改进常规PID;文献[10]利用PSO 算法对常规PID 进行优化,提高了USV 航向的稳定性;文献[11]将模糊PID 控制策略应用于USV 航向控制,验证了该策略的自适应能力和鲁棒性;文献[12]结合自适应变论域理论,利用伸缩因子规则库对量化因子进行自适应调整(未考虑比例因子),仿真结果表明变论域模糊控制能够有效提高系统的自适应能力和工作效率。
上述研究所采用的智能控制策略中,模糊控制表现出较好的控制效果,然而常规模糊控制的论域固定,模糊规则依赖于专家经验。当航向角误差过小时,容易浪费大部分模糊规则;当受到外部干扰、航向角误差过大、误差变化过快时,模糊控制器的调整有限,可能达不到控制系统要求。因此,本文在文献[12]的基础上基于变论域理论改进常规模糊控制。该方法在无人艇航向控制中少有应用,其优点是能够动态调整模糊控制基本论域,从而提高了USV 航向控制系统的自适应能力。
1 无人艇数学模型
本文主要使用浪涌、横漂、偏航运动建立三自由度运动学模型,如图1 所示。
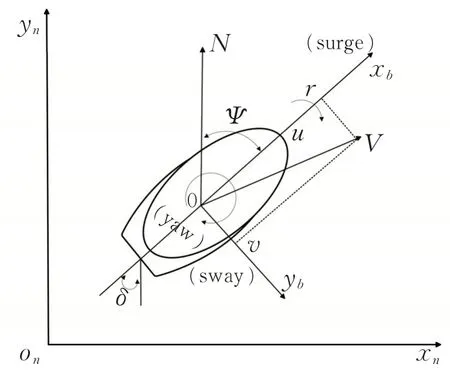
图1 无人艇运动学模型Fig.1 USV kinematic model
坐标系{n}和坐标系{b}的转化关系定义为

式中,x、y、r分别为坐标系{n}下的x轴位置、y轴位置和z轴旋转速度;Ψ为航向角;u和v分别为坐标系{b}下x轴速度和y轴速度。
响应模型作为无人艇运动学模型的一种,它描述了系统输出(航向角)与系统输入(舵角)的动态响应关系,在无人艇航向控制器的设计中响应模型的应用较为广泛。为更好地分析USV 在环境干扰下的操纵特性,设计非线性航向控制器,本文采用二阶非线性Nomoto 响应模型[13],

式中,δ为舵角;K为回转性指数;T、T1、T2、T3为无人艇操纵性指数;τ为非线性项系数。
USV 实际的转向过程主要通过舵机响应来实现,响应过程可用下列二阶欠阻尼模型[14]来描述:

式中,δr为指令舵角;ξ为阻尼比;ωn为无阻尼自然振荡频率;Kδ为放大系数。
由于无人艇在航行过程中不可避免地会受到干扰,且模型存在建模误差,故本文使用参数d0来描述干扰和建模误差[15],得到干扰下的无人艇响应模型为

无人艇在航行时的环境干扰主要包括风和波浪,因此在仿真实验中,使用连续的扰动来模拟环境干扰,可用二阶振荡环节[16]来表示,

式中,Kω为增益系数;ξ0为海浪阻尼系数;ω0为主导海浪频率;ω(s)为高斯白噪声。
2 无人艇航向控制策略
2.1 模糊PID 控制器设计
模糊控制是一种基于模糊集理论的智能控制方法[17-19]。本文根据航向角误差e和误差变化ec在不同时刻的大小,使用模糊规则确定PID 参数的调整量,调整过程如下:

式中,Kpg、Kig、Kdg表示由遗传算法寻优获取的PID 初始参数;Kpf、Kif、Kdf表示由模糊规则确定的调整量。
结合舵角限幅以及实际仿真效果,设置模糊PID 控制器参数误差e基本论域为[-0.6,0.6],模糊论域为[-0.1,0.1];误差变化ec的基本论域为[-0.2,0.2],模糊论域为[-0.1,0.1]。同时,Kpf、Kif、Kdf的基本论域分别为[-0.2,0.2]、[-0.1,0.1]、[-1,1],模糊论域分别为[-0.1,0.1]、[-0.1,0.1]、[-0.6,0.6]。因此,参考文献[20]计算量化因子和比例因子分别为Ke0=0.167,Kec0= 0.5,Kup0= 0.5,Kui0= 1,Kud0= 0.6,并统一定义7 个模糊子集记为{NB,NM,NS,ZO,PS,PM,PB},即{负大,负中,负小,零,正小,正中,正大}。隶属函数为三角型,去模糊化过程使用重心法。表1 分别给出了Kpf、Kif和Kdf的推理规则。
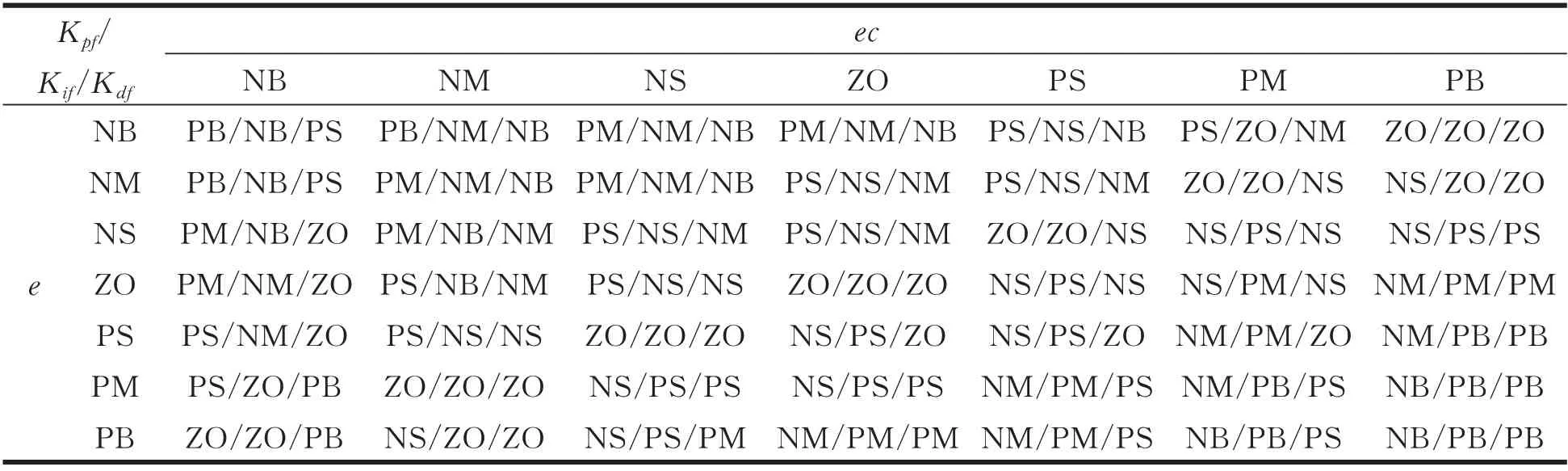
表1 Kpf、Kif 和Kdf 的推理规则Tab.1 Inference rules for Kpf, Kif, and Kdf
2.2 基于变论域理论的模糊PID 控制策略
由于模糊PID 控制器的模糊规则是在固定论域内执行,当输入航向角误差的基本论域较大而实际误差值很小时,大部分模糊规则会失去作用;而当输入航向角误差的基本论域较小而实际误差值很大时,输出的调整量将无法满足系统要求,使得系统控制精度下降。故本文引入变论域理论,该思想是随着误差的变化实时改变基本论域的范围,进一步提高模糊规则的适用范围。论域变化如图2 所示。
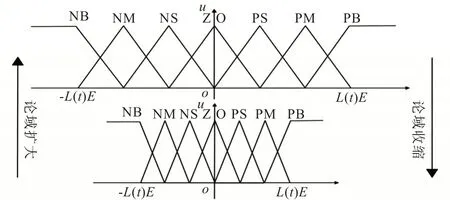
图2 论域伸缩变化图Fig.2 Graph of universe expansion and contraction changes
将变论域模糊控制策略应用于无人艇的航向控制中,可以在航向角误差不断变化时提高模糊规则的适用范围,应对复杂多变的环境,其控制结构如图3 所示。特别的,当出现外部扰动时,论域可根据航向误差剧烈的变化及时作出反应,误差变小,论域收缩,误差变大,论域扩张,进而有效减小系统波动,提高抗干扰性能。变论域原理如图4 所示。
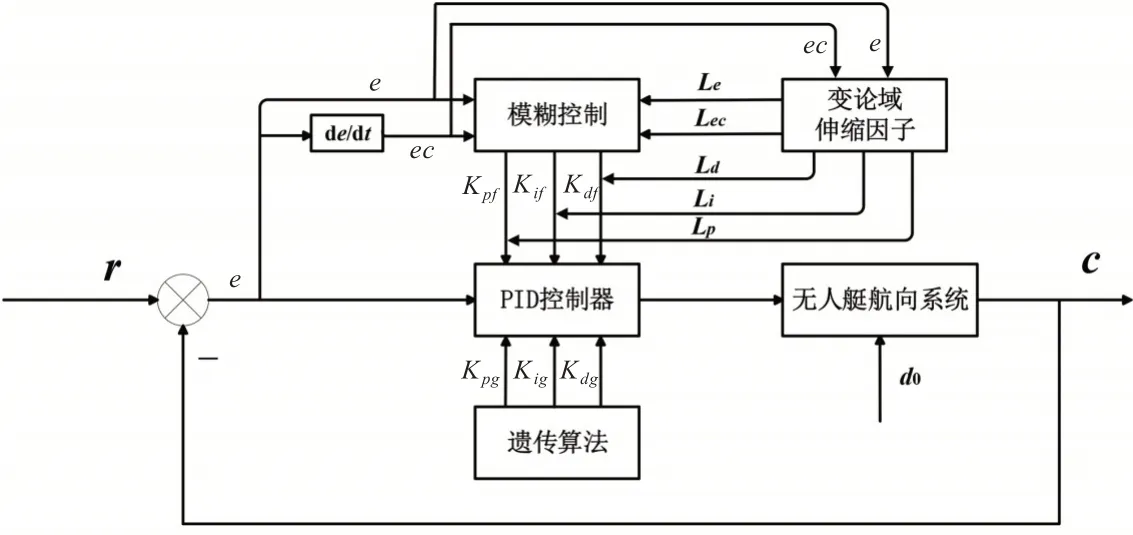
图3 变论域模糊PID 控制结构Fig.3 Variable universe fuzzy PID control structure
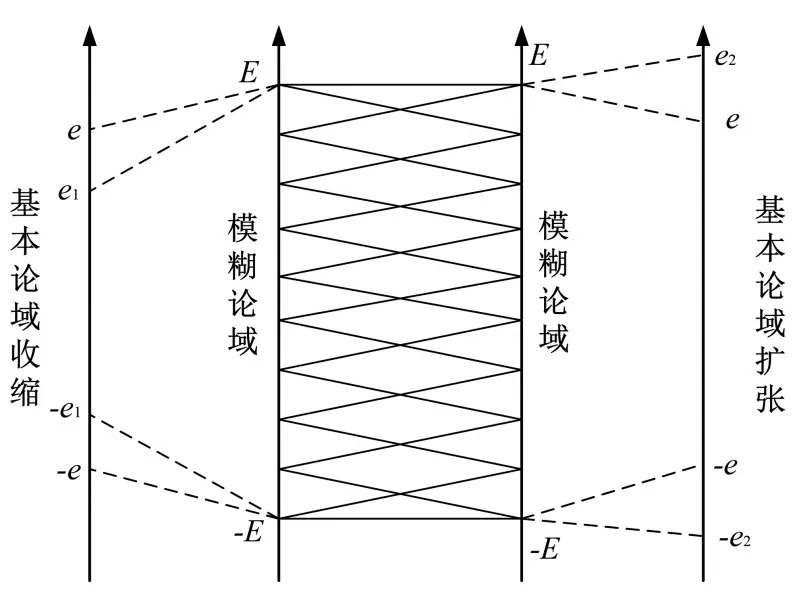
图4 变论域原理图Fig.4 Schematic diagram of the variable universe
由图4 可知,基本论域[-e,e]经收缩后转换为[-e1,e1],且收缩因子L1=e1e;同理,基本论域[-e,e]经扩张后转换为[-e2,e2],且扩张因子L2=e e2。基本论域变换关系如下:

将变论域理论应用于无人艇航向模糊控制系统,主要是通过增加一个伸缩因子,分别作用于量化因子Ke0、Kec0和比例因子Kup0、Kui0、Kud0,

在误差e和误差变化ec的不同范围内,论域调整部分生成调整变量Le、Lec、Lp、Li和Ld,以此来及时进行参数调整,从而改变输入e、ec和输出Kpf、Kif、Kdf的基本论域尺度,增加模糊规则的适用范围,进而获取精确的推理结果。
伸缩因子是变论域理论的关键,目前确定伸缩因子常采用函数或者模糊控制两种方法。基于函数的方法易于设计,结构简单,但不够灵活;基于模糊控制会使论域伸缩具有协调性,然而规则库过大,不易确定。故本文结合两种方法,利用模糊控制对量化因子进行伸缩,增加协调性;设计函数对比例因子进行调整,降低实现难度。结合文献[21],通过反复实验调试确定比例因子的调整变量Lp、Li、和Ld,

量化因子的调整变量Le、Lec由模糊控制器给出,输入变量e、ec论域设置不变,定义ec的模糊子集同上文,e的模糊子集定义为{NB,NM,NS,NZ,ZO,PZ,PS,PM,PB},即{负大,负中,负小,零负,零,零正,正小,正中,正大}。输出变量Le的论域为[0.6,1.5],Lec的论域为[0.4,2],输出论域定义7 个模糊子集记为{CB,CM,CS,ZO,AS,AM,AB},即{大缩,中缩,小缩,不变,小扩,中扩,大扩}。隶属函数均设置为三角型,去模糊化采用重心法,推理规则如表2 所示。
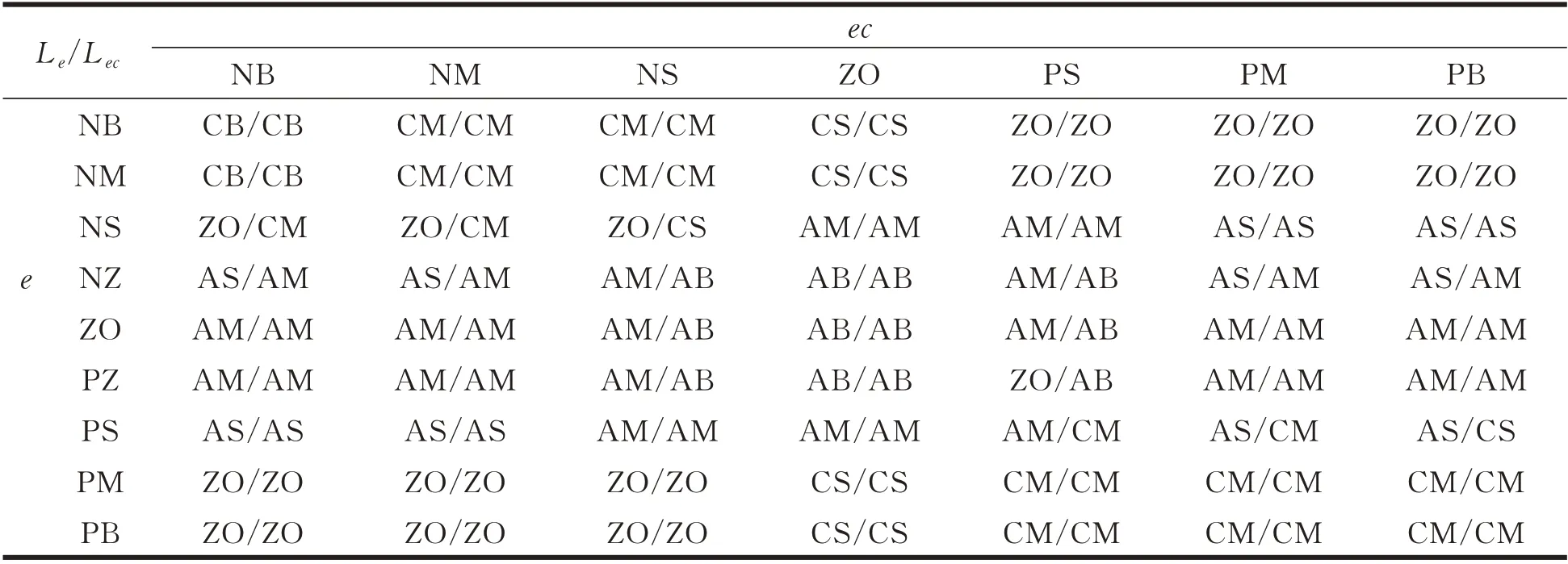
表2 Le、Lec 的模糊规则Tab.2 Fuzzy rules for Le and Lec
本文在常规模糊控制基础上引入变论域理论,随着航向角误差变化实时调整基本论域。其优化过程分为两步,第一步利用模糊推理规则和函数表达式动态优化伸缩因子,即找出一组合适的论域范围,输出粗略调整量;第二步,在模糊控制器中运用模糊推理规则进行参数细调,输出准确调整量。无人艇航向模糊控制系统流程如图5 所示。
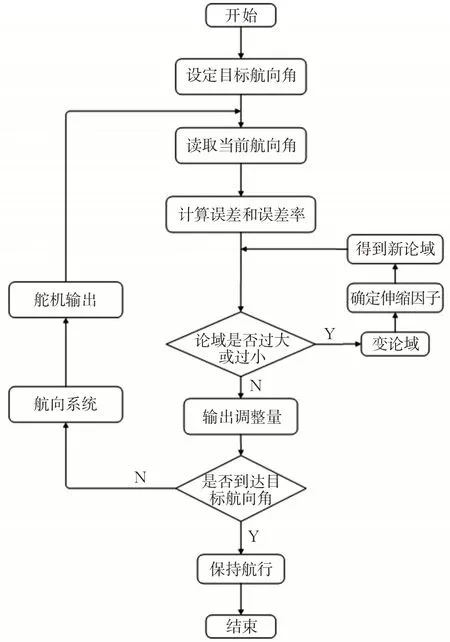
图5 无人艇航向模糊控制系统流程图Fig.5 Flow chart of USV heading fuzzy control system
3 仿真实验分析
本文无人艇模型来源于江汉大学智能制造学院全自主无人艇开放实验平台项目“江豚—16”无人艇实验平台,如图6 所示。该无人艇长1.6 m,配备有电控一体化喷水推进器,搭配多种传感器,利用北斗定位系统和RTK 技术可实时获取USV 航向角及航行经纬度坐标。

图6 “江豚—16”无人艇Fig.6 ″Porpoise-16″USV
在MATLAB/Simulink 平台搭建USV 航向系统模型,变论域模糊PID 子系统仿真模型如图7 所示。仿真设置非线性项系数τ= 0.1,期望航向角为30°,仿真时长为60 s,利用遗传算法得到一组初始PID 参数,Kpg= 0.653,Kig= 0.001,Kdg= 1.125。实验分别采用PID 控制策略、模糊PID(FUZZYPID)控制策略、变论域模糊PID(VUFPID)控制策略进行对比,并设置有干扰和无干扰两组实验环境。
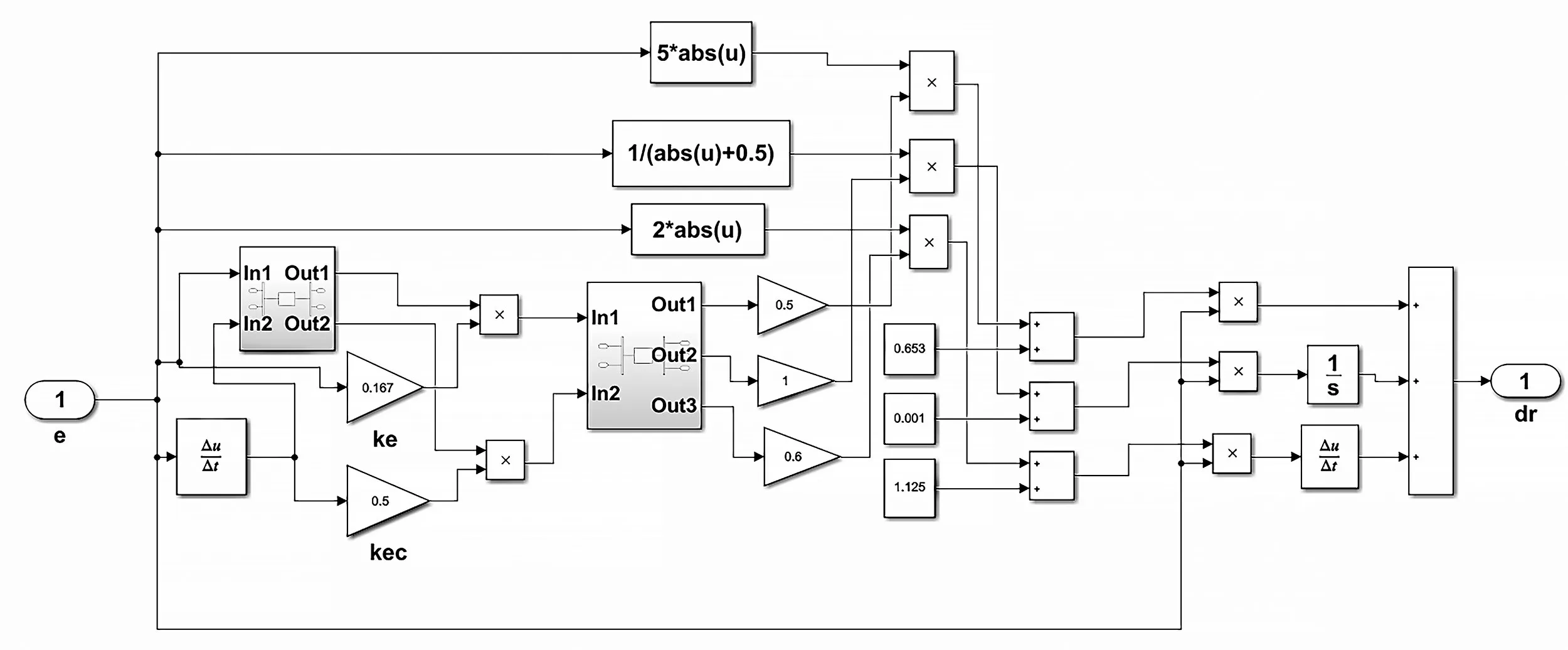
图7 变论域模糊PID 子系统仿真模型Fig.7 The simulation model of variable universe fuzzy PID subsystem
3.1 无干扰环境
在不施加干扰的情况下,分别采用3 种控制策略进行仿真实验,得到航向角响应曲线如图8所示,舵角响应曲线如图9 所示,航向角动态响应指标如表3 所示。

表3 航向角动态响应指标Tab.3 Dynamic response index of heading angle
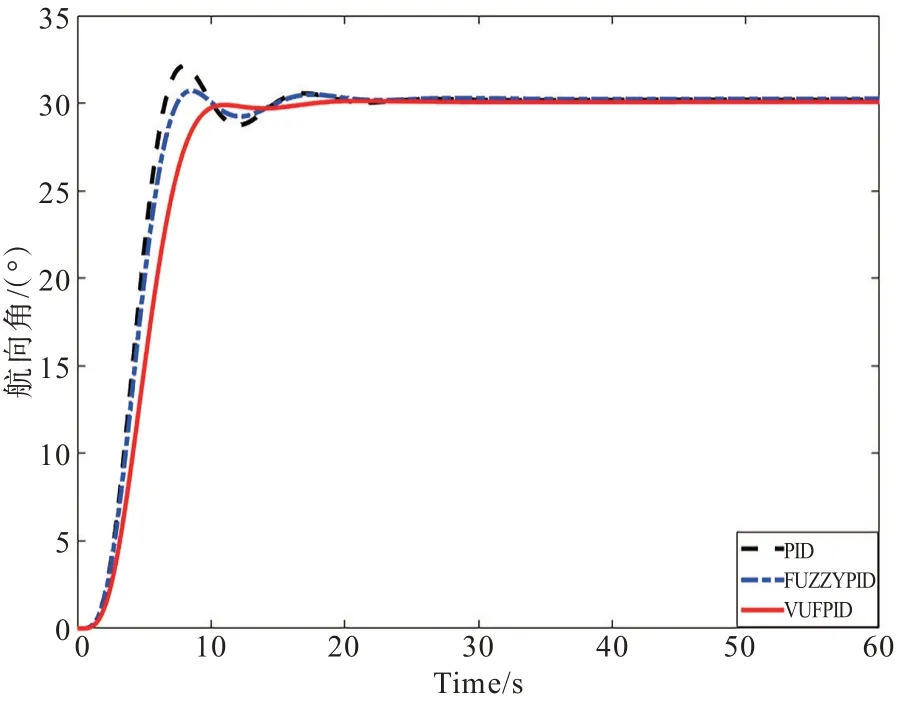
图8 航向角响应曲线Fig.8 Heading angle response curve
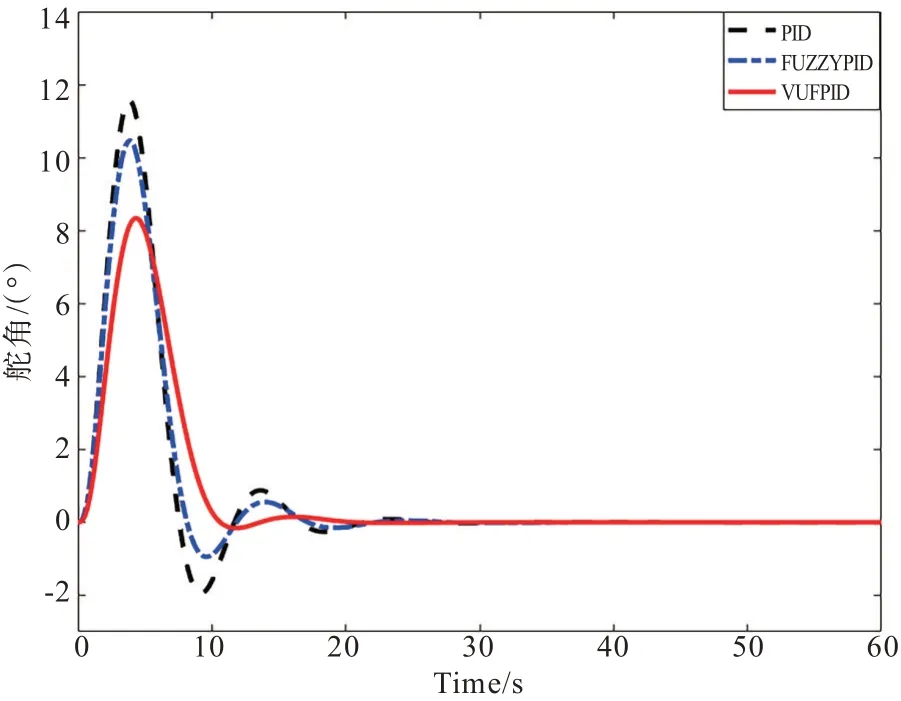
图9 舵角响应曲线Fig.9 Rudder angle response curve
根据表3 可知,在无干扰的情况下,变论域模糊PID 对比常规PID 和模糊PID 显示出更好的控制效果,消除了系统超调,调节时间更短。这是由于系统误差较小时,变论域模糊控制器能够及时调整基本论域,充分发挥模糊规则的作用,得到更准确的调整量,使得USV 航向跟踪精度更高。
3.2 有干扰环境
本文设置的高斯白噪声功率谱密度为0.001,公式(6)的参数ξ0= 0.3,ω0= 0.602 5,且Kω在四级海况和六级海况下的取值分别为0.197 9 和0.419 8,干扰时间为40 s。仿真得到四级海况下航向角响应曲线如图10 所示,舵角响应曲线如图11 所示;六级海况下航向角响应曲线如图12所示,舵角响应曲线如图13 所示。
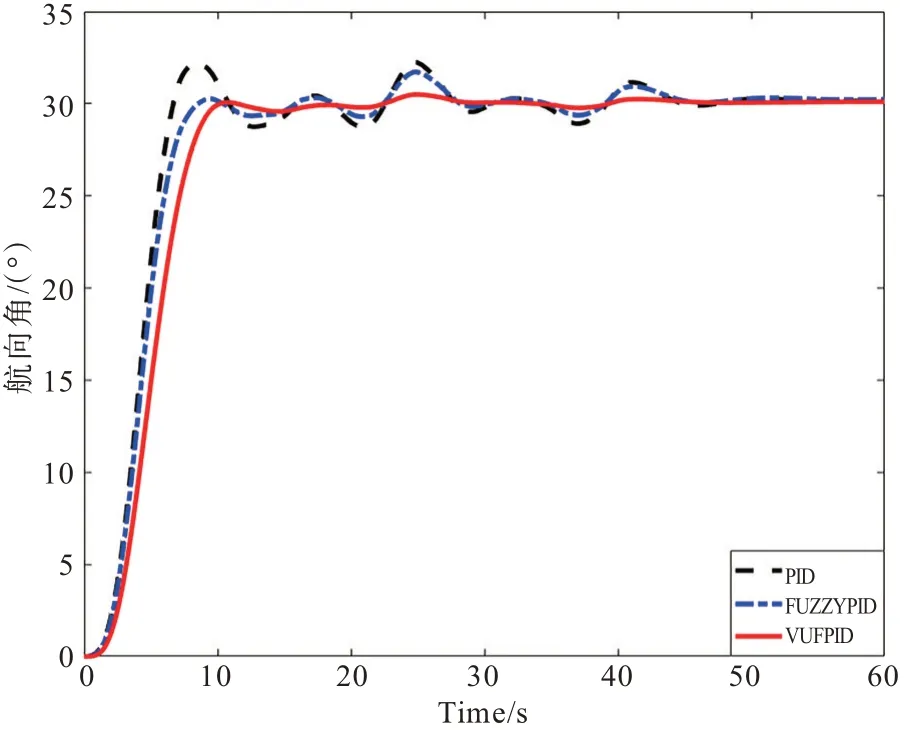
图10 航向角响应曲线(四级海况)Fig.10 Heading angle response curve under level 4 sea state
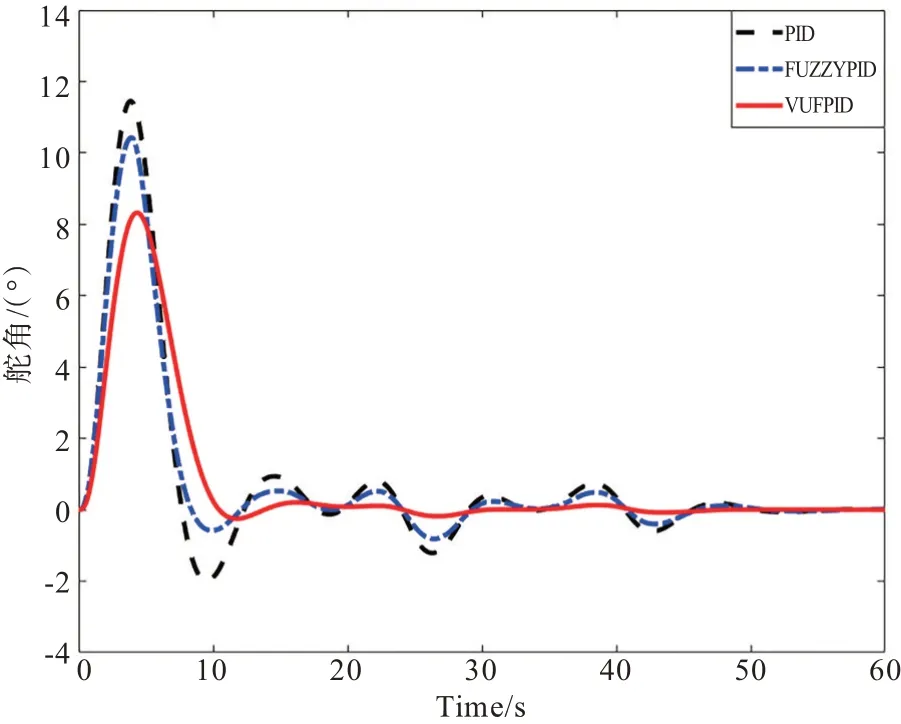
图11 舵角响应曲线(四级海况)Fig.11 Rudder angle response curve under level 4 sea state
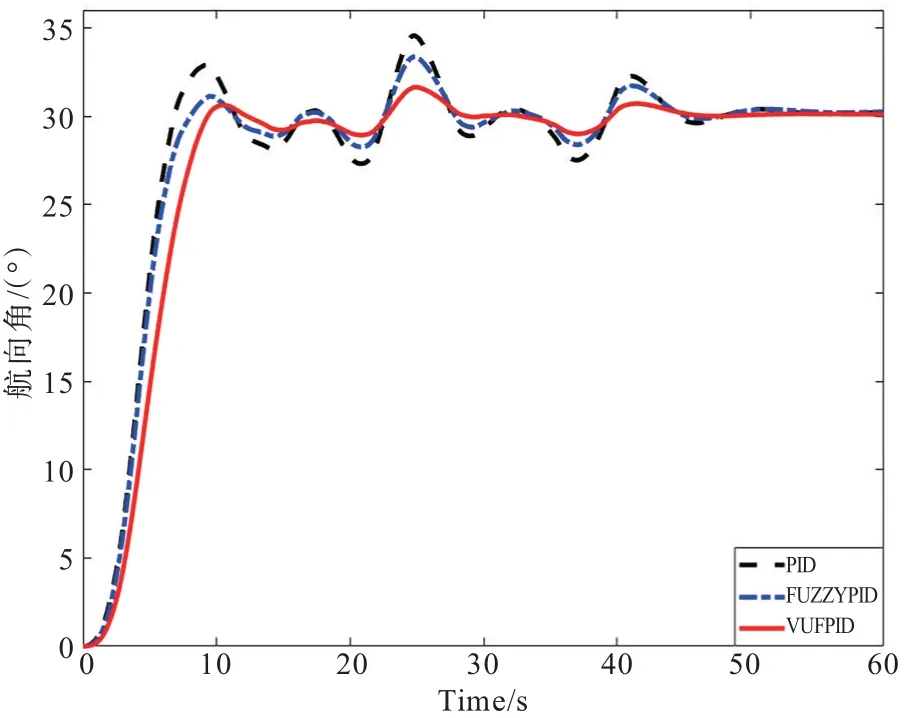
图12 航向角响应曲线(六级海况)Fig.12 Heading angle response curve under level 6 sea state

图13 舵角响应曲线(六级海况)Fig.13 Rudder angle response curve under level 6 sea state
由图10 ~图13 可知,在有干扰的情况下,常规PID 和模糊PID 所产生的振荡幅度较大,在40 s 干扰结束后调整时间较长。相比之下,变论域模糊PID 表现出更好的自适应性,航向角和舵角波动较小,且在干扰结束后能够快速稳定。加入外部干扰会使航向角误差变大,误差变化速度更快,常规模糊控制器容易出现基本论域过小的情况,导致航向控制系统精度下降;而变论域模糊控制器会及时扩大基本论域,使得输出调整量能够满足系统要求,表现出更好的动态响应性能和抗干扰能力。
4 结语
针对USV 非线性、不确定性和时变的特点,考虑到常规模糊控制规则和论域固定不变,达不到USV 航向控制系统精度要求的问题,本文引入了变论域理论,提出了变论域模糊PID 航向控制策略。该策略结合函数和模糊控制的优点,确定了协调性好且易实现的伸缩因子,加入伸缩因子可以随着航向角误差变化灵活地改变基本论域,进一步提高了USV 航向控制系统应对复杂多变环境的能力。仿真实验中,在无干扰和有干扰环境下,通过对比3 种控制策略的航向跟踪效果,验证了本文所提出的控制策略效果更好,能够有效提高USV 航向控制系统性能,对于USV的智能航向控制具有一定的参考价值。
