混凝土结构缺陷的无损检测方法的试验研究
2022-07-04刘志豪
刘志豪
(安徽维尼检测科技有限公司,安徽 合肥 230088)
0 引言
裂缝和空隙是影响混凝土耐久性的缺陷。为了不仅检测这些缺陷,而且检测混凝土厚度,UE 和IE 方法被广泛使用。这两种方法都是基于波源产生的弹性波,在测试介质中传播。在UE 中,可以通过使用两个传感器确定传播时间来识别缺陷位置和深度,其中一个用作波源,另一个用作记录器。合成孔径聚焦技术(SAFT)在混凝土缺陷和嵌入物体的超声成像方面具有巨大潜力,在IE 中,瞬态应力脉冲通过表面上某点的机械冲击引入结构。此外,为了改进IE 技术,本文开发了一种扫描程序,即基于IE(SIBIE)的光谱振幅叠加成像。需要确定嵌入混凝土中的材料类型,如钢筋或空隙。除此之外,还应考虑反射超声信号的相位角,本文通过确定超声波信号的相位角识别管道内的材料属性。
1 冲击回波和超声波回波法
1.1 IE 和UE 原理
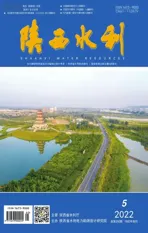
在IE 方法中,通过机械冲击引入瞬态应力脉冲,例如将一个小钢球落在混凝土表面上,并将其作为P、S 和R 波传播到结构中。这些波传播到结构中被元件的内部缺陷和边界反射。在这种方法中,P 波是最重要的,因为P 波引起的位移比S 波引起的位移大得多。在此过程中,通过靠近撞击点的传感器,监测反射波到达引起的表面位移,并使用快速傅里叶变换(FFT)技术将记录的时域信号转换为频域(图1),与大振幅峰值相关的频率代表波形中的主要振动频率[1-2]。因此,传感器处的P 波接收频率已确定,且P 波的速度(Cp)已知,可根据方程式(1)计算缺陷深度:
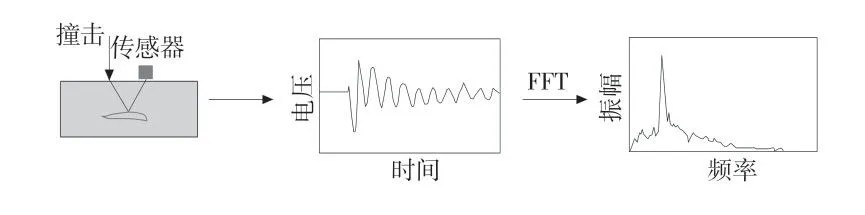
图1 冲击波成像法

式中:D 为缺陷深度,m;Cp为P 波的速度,m/s;f 为频率。
在UE 方法中,从超声传感器传输的弹性波传播到结构中,当波路径中存在不连续(如裂纹)时,部分能量从缺陷表面反射回来。这些反射波由超声波传感器收集并记录。传统的UE 技术见图2。超声波检测可用于缺陷检测、尺寸测量、材料表征等。
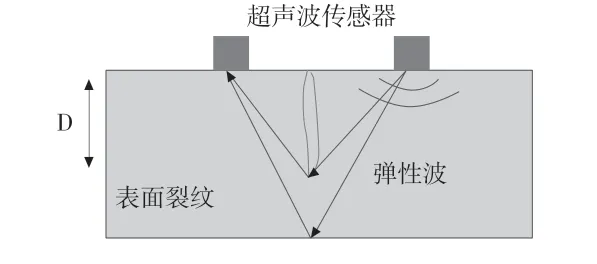
图2 超声波检测法
典型的UE 系统由多个功能单元组成,如脉冲发生器、接收器、传感器和显示设备。反射波信号由传感器转换为电信号,并显示在屏幕上。超声波检测法与冲击波成像法不同,不需要将时域转换为频域。信号传输时间与信号传输距离直接相关。因此,从该信号可以获得关于反射器位置、尺寸和其他特征的信息。
1.2 SIBIE 和SAFT 成像算法
SIBIE程序是解释撞击回波数据的一种改进的替代方法。在IE 方法中,通过识别频谱中的峰值频率来估计混凝土中缺陷的深度。然而,由于冲击波的多次反射和衍射,频谱中经常观察到许多峰值,因此不能很好地解释频谱。为了解释撞击回波数据并改进方法,将成像技术SIBIE 应用于频域数据。该方法已应用于混凝土裂缝评估,相关研究结果表明该方法可用于识别混凝土中的缺陷[3-4]。
在该程序中,首先,将混凝土横截面划分为方形构件,见图3。然后,计算每个元件处反射引起的共振频率。通过元件从输入位置到输出位置的行程距离进行计算:
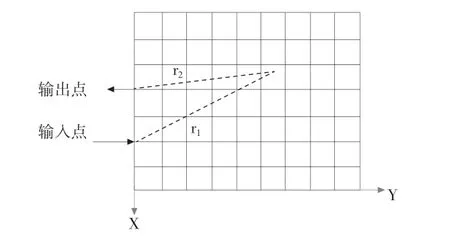
图3 光谱成像模型

式中:R 为行程距离,m;r1为输入距离,m;r2为输出距离,m。
由每个元件处的反射引起的共振频率计算如下:

将频谱中这两个共振频率对应的谱幅值归结在每个网格上。因此,反射强度估计为每个元素的堆栈图像。SIBIE 分析的最小二乘网格尺寸∆应近似等于Cp∆t/ 2,其中Cp为纵波速度m/s,∆t 为记录波的采样时间,s。
在UE 分析中,可以对A、B、C 扫描等不同状态进行评估。然而,在对非均质材料进行截面分析时,由于非均质结构阻止了获得预期的信号形式,从而使超声扫描的真实感和效率产生了诸如信号衰减和散射等问题。因此,为了消除这些问题,开发了SAFT。
一般来说,当超声波源远离检测点时,信号到达时间值相对高于接近检测点时的值。这些合成的时间延迟会造成扫描区域几何形状的错觉。因此,点散射体将产生双曲线模式。在这种情况下,必须评估和纠正时间延迟。如图4 所示,(xi,yi)和(xn,yn)分别是检查点和传感器的坐标。反射距离“Zi”和时间“ti”可分别由式(4)和式(5)确定。
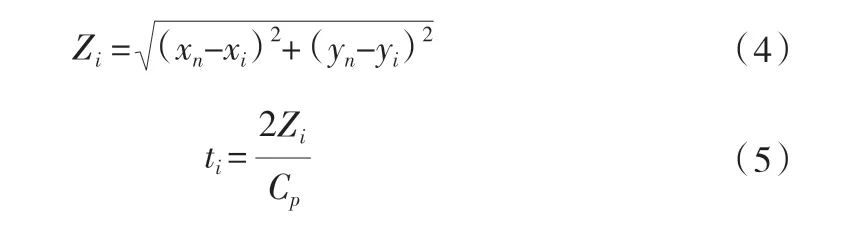
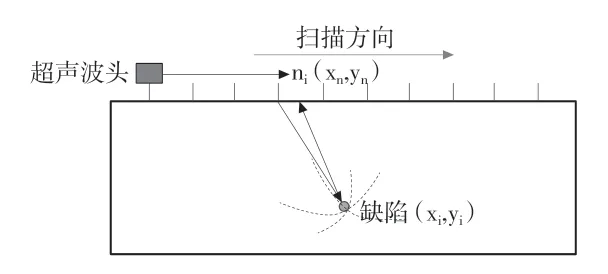
图4 SAFT 算法在节中的应用
超声波源在表面上以“d”间隔移动。因此,时间延迟值“∆ti”可由式(6)计算得到:

因此,通过移位的时间延迟,可以找到振幅。为了识别材料的性能,使用信号相位变化。确定信号的相位角,并从这一角度出发,根据信号波形的反射原理对截面进行分层。当层厚增加时,相角变化上升到180°。
由于峰值频率值较为复杂且彼此接近,因此波传播采用傅里叶变换。经过变换后,可以从脉冲的真实部分和成像部分之间的角度确定所获得信号的相位角。若比较声阻抗和相位角,可以很容易地找到该层的材料特性。此外,影响层间通过的主要因素之一是层厚度。当厚度增加到一定程度时,信号的峰值频率和相位角也会增加。但是,如果厚度达到较高值,则无法明显观察到反射。因此,为了确定理想厚度,必须控制材料的声阻抗和波反射系数。
2 实验研究
2.1 样本
在研究范围内,制作了两个尺寸为0.5 m ×0.4 m×1 m的混凝土试样(C30)(图5)。每个试样都有20 cm 深的后张管道。一半的管道用砂浆填充,分别由0.2 mm 和2 mm 厚的金属制成。
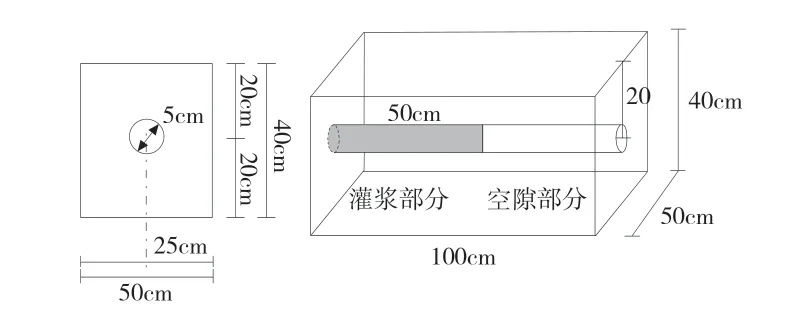
图5 试样
2.2 IE 和UE 测试
在实验研究中,使用具有24 个传感器和记录器的超声波进行UE 测量。所有传感器同时作为超声波信号接收器和发射器工作。最合适的频率间隔为50 kHz,并在此范围内进行试验。对于所有点,接收信号取自4 个信号的平均值,因此测量误差最小化。将试块的顶面划分为间隔3 cm 的方形单元,并通过移动超声波进行测量。所得数据在时域内进行分析。上述SAFT 算法对两个样本重复了13 次,并指出涉及浓度的区域提供了有关肌腱导管位置和几何形状的信息。为确定钢筋束管道中的孔隙比,采用相移原理。为应用IE 方法,使用几个球体来产生弹性波。直径为4 mm 的球体在以足够的能量和波长驱动冲击方面提供最佳结果。加速度计用于检测弹性波反射引起的表面位移。加速度计系统的频率范围为直流至50 kHz。用快速傅里叶变换(FFT)分析加速度的傅里叶谱。采样时间为4 s,每个波形的数字化数据数为2048。将被测混凝土试样的横截面划分为方形单元,以进行SIBIE分析。通过超声波脉冲速度测试,混凝土砌块的P 波速度为4200 m/s。
3 结果和讨论
在试验中,主要调查了钢筋束导管的位置。通过SAFT,用交叉阴影线监控截面的几何结构。检查每个网格组的A和B 扫描。将实验结果和对应于点坐标的振幅值进行比较,并评估具有高浓度的区域。在目标框架内解释B 和C 扫描。在x=0.25 m 的y-z 剖面中获得的D 扫描显示了图6 中的安全和相位分析结果。根据安全原则,对管道灌浆和缺陷部分的位置进行监测。灌浆部分获得高集中振幅值,而缺陷部分获得较低振幅值。类似地,底部表面的反射可以在图7 中看到。
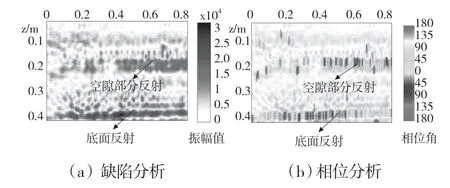
图6 y-z 截面扫描x=0.25 m
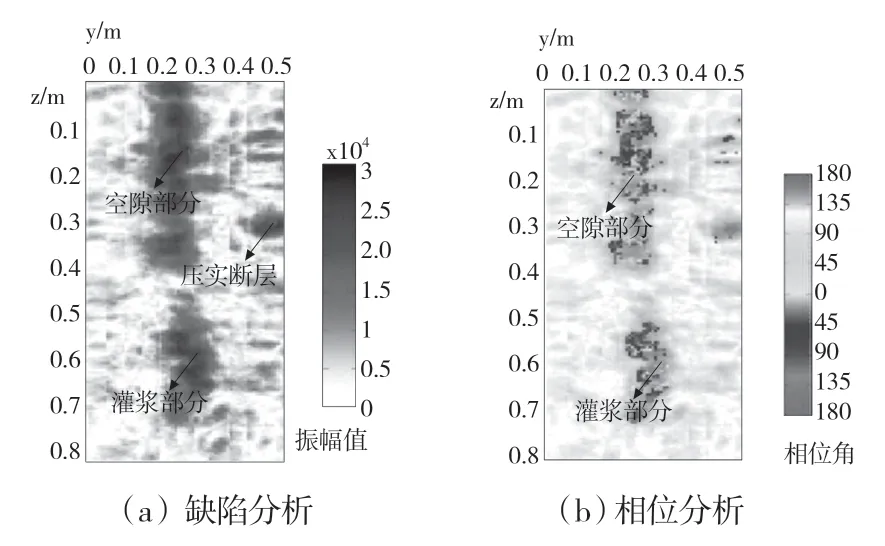
图7 x-y 截面扫描z=0.198 m、t=0.2 mm
在图7 和图8 中,分别给出了在19.8 cm 深度处具有0.2 mm和2 mm 金属导管的试样的SAFT 分析C 扫描结果。该深度约为钢筋束管道的中心。成功监测钢筋束导管,并对其进行灌浆,识别出空部分。导管上方区域的振幅值更高,图像更清晰。因此,通过相分析对相同试样进行评估,并清楚地接收到相移。此外,在灌浆部分观察到一些相移,认为这可能是注入故障造成的。图9 显示了应用于试样顶部记录的冲击试验数据的SIBIE 分析结果。这些数字分别对应于有缺陷零件和满灌浆零件。图9(a)表示风管内的空隙。在这里,较暗的色调表示高强度振幅区。对比两个图,可以说,通过应用SIBIE 可以区分管道的空部分和灌浆部分。
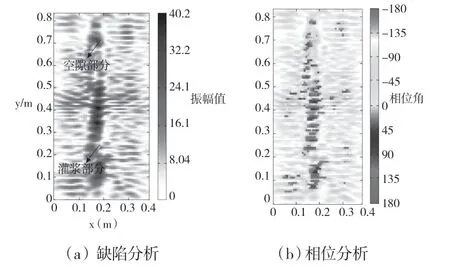
图8 x-y 截面扫描z=0.198 m、t=2 mm
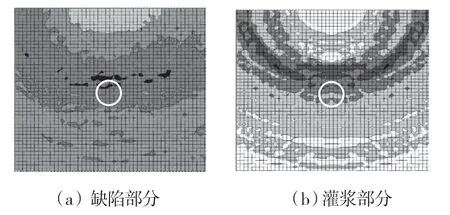
图9 冲击试验数据SIBIE 分析结果
4 结论
在后张法施工结构构件中,钢筋由于从空隙中渗出的水而腐蚀,结构失去稳定性。导管的位置可以用UE 方法进行识别,然而并不总是可以确定导管内的空隙。为此,将UE 和IE 方法应用于试件,应用SAFT 和SIBIE 技术进行可视化,利用信号的相位信息确定导管位置,并对结果进行比较。在所有检测情况下,获得的结果误差为1 mm~3 mm。使用具有高频率的传感器可以很容易地确定缺陷。然而,由于试样尺寸较小且压实不好,信号不容易解读,因此在图像中可以看到压实缺陷,观察导管和空隙的位置。