基于新型犬牙式离合器的电动汽车脱困算法仿真
2022-06-25余慨鲁统利严旎伟
余慨 鲁统利 严旎伟
(上海交通大学机械与动力工程学院,上海 200240)
1 引言
近年来,受政策收紧和国际竞争加剧的影响,汽车行业正经历重大转型升级[1]。能源供需关系的紧张,使得低碳、节能的新能源汽车成为行业发展的重点[2-3]。电子断开式差速器(Electric Disconnect Differential,简称EDD),是一种可应用于前后独立驱动的纯电动汽车或混合动力汽车的新型传动装置。EDD在传统差速器的内部增加了离合器,可实现电机到车轮半轴的动力传递与中断。若在前后独立驱动汽车的驱动桥中都安装EDD,则可灵活实现前驱/后驱/四驱的模式切换,对于提高汽车的经济性、动力性、操纵稳定性具有重要的意义。
EDD的控制包含两个方面:犬牙离合器的接合与断开控制,以及EDD应用于整车时与电机的协同控制。接合控制比较复杂,离合器两端的转速差过大或过小均可能导致接合失败,只有在最佳转速差的范围内才有较高的成功率[4-5]。对于EDD控制器而言,其整车控制策略需在合适的时机决断二轮/四轮驱动模式的切换,在切换完成之后需合理分配前、后轴的扭矩。
2 建模
2.1 EDD构型方案
EDD设计为差速器壳体内犬牙离合器的构型,在差速器壳体内部通过犬牙离合器进行断开和接合操作从而实现动力的断开和传递。接合过程中,在电磁力的推动下犬牙离合器与差速器支架啮合,构型如图1所示。
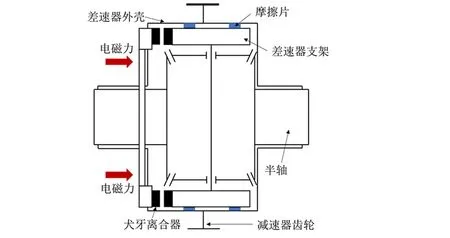
图1 犬牙式离合器构型Fig.1 Differential housing canine clutch
2.2 犬牙式离合器模型
本节建立简化的犬牙式离合器模型,既能基本反映犬牙离合器的动力学特性,又能提高EDD控制策略开发和仿真的效率。离合器模型的主动端为犬牙离合器的啮合齿,被动端为差速器支架的啮合齿。本节将接触情况分为6类,齿间接触力Fcont在不同接触情况下有不同的轴向分力Fcont,s和切向分力Fcont,t,图2所为最复杂的Case3、Case4两种接触情况。由于离合器浸润在润滑油中,接触面的摩擦系数很小,所以摩擦力在此忽略不计。
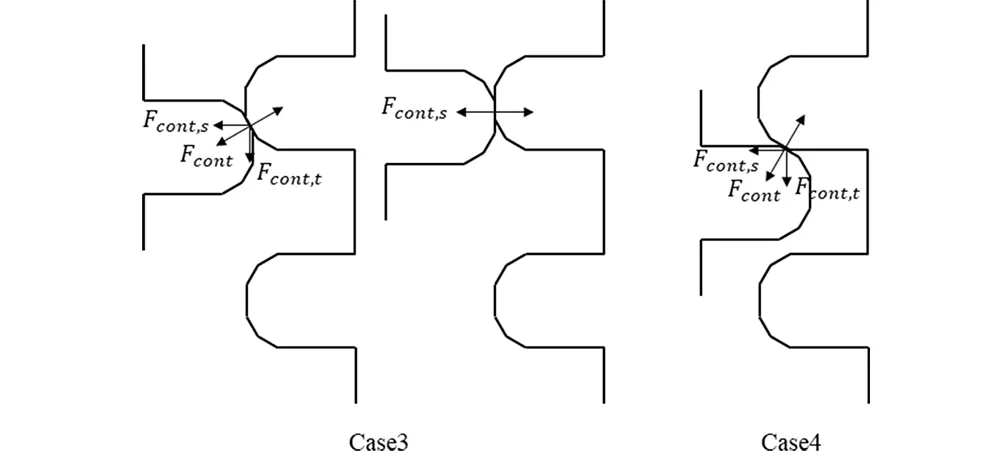
图2 犬牙离合器接触力模型Fig.2 Dogclutch contact force model
Case 1:离合器碰到限位,只有轴向分力。
Fcont=-Fcont,s
(1)
Case 2:离合器无接触。
Fcont=0
(2)
Case 3~4:轴向力和切向力,如图2所示。
(3)
Case 5:离合器牙侧碰撞,产生切向分力。
Fcont=Fcont,t
(4)
Case 6:离合器牙底碰撞,产生轴向分力。
Fcont=Fcont,s
(5)
2.3 传动系统模型
包含EDD的传动系统动力学模型,如图3所示。动力从电机端经过减速器、离合器、差速器、半轴传递到车轮端,该模型可以反映离合器接合与断开过程的动力学特性,也可以用于整车动力性和操纵稳定性仿真。
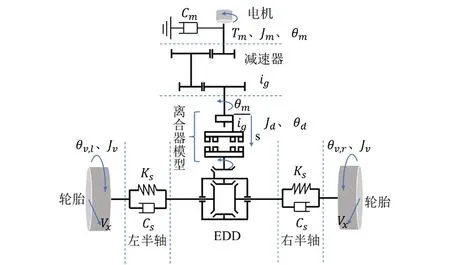
图3 传动系模型Fig.3 Driveline model
图中参数符号,Cm、Tm、Jm、θm分别为:电机阻尼、电机转矩、电机转动惯量、电机转角;ig为减速器的总减速比;EDD包括犬牙离合器和差速器,其中:s为离合器轴向位移;Jd、θd分别为差速器支架的等效转动惯量、转角;Ks、Cs分别为半轴的扭转刚度和阻尼;θv,l、θv,r、Jv分为左、右轮胎的转角和转动惯量;
传动系统动力学方程组如下:
(6)
式中,Rw为车轮半径;θv,i、Ts,i分别为左、右车轮的转角和转矩。
3 控制算法
前后独立驱动的纯电动汽车(IDEV)处于前驱模式在泥泞坑洼的道路上行驶时,假如前轮陷入泥潭中容易丧失驱动力,导致前轮空转受困。装备有EDD的车辆通过采集车辆状态信息检测到车辆处于受困工况,自动接合后桥EDD使后轮获得驱动力,充分利用后轮的地面附着条件使车辆摆脱受困工况。
VCU根据车辆参数信息识别出车辆处于受困工况后,EDD控制器随即控制电机控制器MCU进行调速接合,后桥EDD接合完成后电机进入扭矩控制模式,以扭矩梯度βload加载扭矩,在此过程中可能出现两种情况:
(1)在电机扭矩加载至超过后轮最大附着力前摆脱受困工况,此时可按照扭矩梯度βunload卸载后桥电机扭矩,扭矩清零之后断开后桥EDD,使车辆由四驱模式切换回前驱模式;
(2)在扭矩加载至超过后轮最大附着力后仍未摆脱受困工况,此时继续增大电机扭矩并不能增加地面对车轮的切向反作用力,需将后轮滑移率控制在最大附着系数对应的范围内,最大限度利用后轮的路面附着条件。
后桥电机扭矩从EDD接合成功后开始加载,t时刻扭矩大小为:
Tr(t)=βloadt
(7)
若后轮滑移率超过目标滑移率,则使用PID算法将其稳定在目标值附近,控制输入为目标滑移率和实际滑移率的偏差:
e(t)=λc-λr(t)
(8)
式中,λc为目标滑移率;λr(t)为实际滑移率。
PID反馈控制的表达式如下:
(9)
卸载过程中扭矩梯度为βunload,经过t时刻后桥电机扭矩大小为:
Tr=Ttarget-βunloadt
(10)
4 仿真
CarSim仿真模块中设置高低附着系数的对接路面,路面附着系数分为三段:0.85、0、0.85,车辆初始位置前轮处在附着系数为0的低附着路面模拟驱动轮受困工况,后轮处在附着系数为0.85的良好路面,如图4所示。
半轴扭矩方面:0 s~1.3 s车辆为前驱模式,左后、右后半轴扭矩为0 N·m;1.3 s~2.5 s内后桥EDD接合,后电机提供扭矩,前电机停机,左前、右前半轴扭矩为0 N·m,左后、右后半轴扭矩增大,特别在1.3 s左右出现脉冲,原因是EDD接合时犬牙式离合器产生的冲击力矩传递到半轴;2.5 s~6.0 s后桥EDD断开,车辆切换为前驱模式。
EDD控制信号方面:控制信号趋势与离合器位移一致,1表示接合信号,0表示断开信号,在1.3 s和2.5 s分别有接合与断开动作。
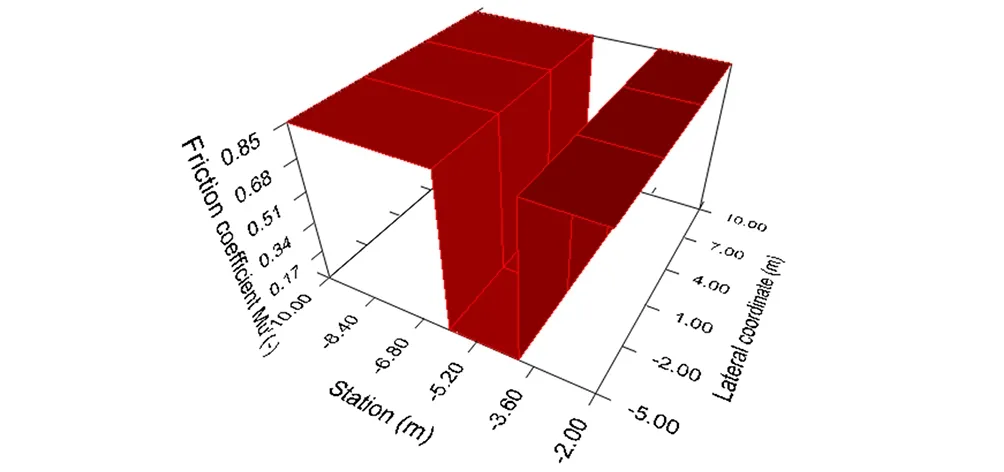
a.对接路面附着系数

b.车辆初始位置图4 仿真路面工况设置Fig.4 Simulation of road conditions setting
车辆初始为前驱模式,速度为0 m/s,驾驶员从0 s踩下油门,双电机协同控制脱困策略根据车轮滑移率、油门开度和踩踏速率等信息识别车辆受困情况,控制后桥EDD接合,利用后轮的附着条件使车辆脱困,仿真结果如图5所示。
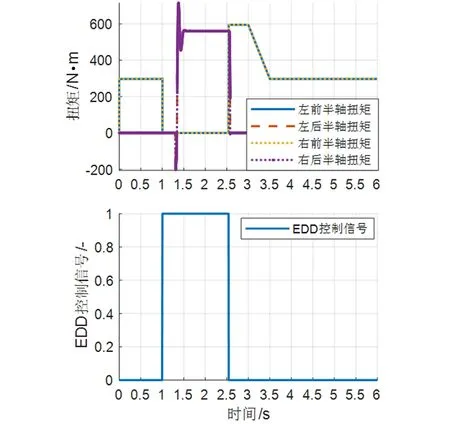
图5 脱困工况仿真结果Fig.5 Simulation results of escape conditions
5 结论
建立了差速器壳体内犬牙离合器的电子断开式差速器的模型,并针对驱动轮受困工况设计了脱困算法。仿真结果验证了该算法在驱动轮受困的情况下,可以有效地切换车辆驱动模式,当前轮因受困无法提供足够纵向力时,控制器及时接合后桥EDD使得后轮输出更多的纵向驱动力,车辆摆脱受困状态后又可以快速恢复前驱模式,满足经济性要求。
