煤矿井下信号灯自动控制系统的设计
2022-06-24孙泽明
孙泽明
(山西省电子工业科学研究所有限公司,山西 太原 030006)
0 引言
随着煤矿开采时间的延长,巷道也变得越来越长,越来越复杂,和路面的交通越来越相似;这就对井下车辆的管理提出了新的更高的要求。井下车辆的使用日益频繁,主要用于材料、物资、设备、人员的运输,如何便捷、有效的管理车辆,减少车辆间、车辆与矿工之间事故的发生,提高生产效率,并在某些特殊情况下实现车辆对红绿灯的自动控制,或者红绿灯对车辆的识别后进行红绿灯控制,这是智慧矿山的一部分。例如矿难发生时,紧急运送物资的车辆需要无障碍通行,这就使得在经过有红绿灯的卡口时对红绿灯实行自动控制。
本文主要介绍一种运输车辆在经过红绿灯卡口时如何对红绿灯实现自动控制,使红绿灯按照运输车辆发出的指示进行“通行/禁止”间的切换。
1 系统介绍
本系统主要分为两部分,移动目标(运输车辆)部分和静态(红绿灯卡口)部分。
移动目标在一定距离范围内发出改变静态目标状态请求,静态目标获取移动目标发出的指令请求,执行相关指令,并发送成功指令给移动目标。
在设计时可以分为简单设计和复杂设计,复杂设计包含静态目标发送执行成功与否信息给移动目标,而简单设计可以省去该部分。如图1。

图1 系统示意图
2 技术选型
本系统主要涉及的技术为无线通信技术和信号传输技术。井下车辆的最大行驶速度不超过40 km/H,大约11 m/s。将静态目标接收信号时间、处理信号时间、将接收信号传输到卡口各控制模块时间等综合考虑,移动目标与静态目标的距离至少应该为5s左右的时间差;所以信号传输范围必须大于55 m,100 m以上传输距离更佳。
静态目标接收到动态目标的信号后,将控制指令传输到卡口的红绿灯控制盒。一般按卡口最多4个红绿灯计算,信号需要传输的距离大约为100 m。
根据以上分析,无线传输模块采用CC1310F128无线数传模块,信号传输采用CAN接口协议进行。
CC1310是德州仪器(TI)系列器件中的经济、高效、超低功耗1 GHz以下的SOC射频器件。它既具有Cortex®-M0的射频性能,又具有强大的48 MHz Cortex®-M3微控制器,具有极低功耗和极小体积,适用于由小型纽扣电池供电的远距离操作。
CC1310-TC-005模块提供了多个频道的选择,可在线修改串口速率、发射功率、射频速率等各种参数。该模块能够透明传输用户数据,而用户无须编写复杂的驱动程序,同时小体积宽电压运行,视距下的传输距离可达1500 m,使之能够应用在非常广泛的领域。该模块是新一代的多通道嵌入式无线数传模块,同时该模块提供标准的TTL接口,提供800/9、600/19、200/38、400/115、200 bps五种速率和三种接口校验方式。该模块外部接口采用透明数据传输方式,能适应标准或非标准的用户协议,所收的数据就是所发的数据。

表1 CC1310F128射频参数
MCU选择STM32F40X系列芯片。STM32F40X系列是ST公司具有Cortex-M4内核,具有32位处理能力,并具有FPU(Floating Point Unit)能力的高性能微处理器,具有最高1 MB Flash和192 K RAM。该MCU具有8080/6800模式下的LCD并行接口,2路12位AD转换接口,最多17个定时器,最多140个I/O接口,最多15个通讯接口,包括3个I2C接口,4分UART接口,2个CAN接口等,此外还包括视频、语音等接口,能高效实现本系统功能外,还能为以后的性能、功能扩展起到很好的支撑作用。
控制端向卡口信号灯发送信号使用CAN总线方式。CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线。CAN属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。基于CAN总线的分布式控制系统在以下方面具有明显的优越性:网络各节点之间的数据通信实时性强,开发周期短,可靠性强等。不过CAN总线的传输距离与传输速率有着明显的对应关系。通信速率5 kbps以下,传输距离可达10 kM;通信速率最高可达1 Mbps,但是此时通信距离在40 m以下,设计时应加以考虑。
3 硬件实现
移动目标在行驶过程中不断发出433 MHz射频信号,在卡口接收器可接收范围内收到信号后,接收器端的CC1310-TC-005模块将接收到的信号通过TX/RX管脚传输到微控制器(MCU)的RX/TX管脚(如图2),MCU再将接收到的信号,处理后发送到CAN传输接口芯片(如图3),通过接口芯片发送到卡口信号灯控制器。
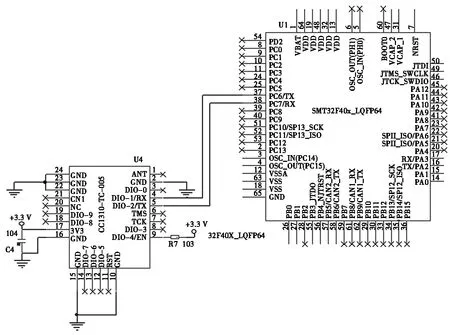
图2 信号接收

图3 信号发送
4 软件流程
流程图如图4所示。首先启动设备后,该设备一直处于监听状态,监听移动目标发送来的射频信号;433模块接收到射频信号后,进行数据转换,传输到MCU,MCU根据拟定好的通信协议生成CAN数据包,最后将数据包发送到特定卡口的信号灯控制盒。
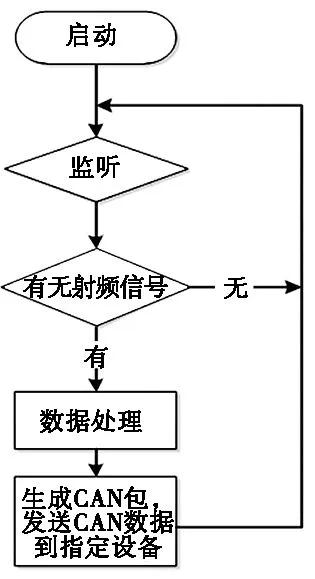
图4 流程图
5 结束语
本系统设计时需要考虑射频信号的发送距离、CAN数据的传输距离、和原系统的通信协议、井下的复杂环境等关键因素等,实验室试验成功后还需要井下的实地试验,综合考虑因素较多,对研发设计人员的能力要求比较全面。
