一种视障人群安全监护系统的设计*
2022-06-24曾旭晨车琴琴卢莉蓉
曾旭晨,车琴琴,卢莉蓉
(长治医学院生物医学工程系,山西 长治 046000)
0 引言
我国每年会出现盲人约45万,低视力患者约135万,到2022年我国视障人数即将达到7000余万,视障人群的安全出行成为社会各界普遍关注的问题。
视障人群监护设备对于一个视力障碍人士来说至关重要,而现如今我国的视障人群监护设备还处于待开发领域。目前的监护设备有盲道、导盲犬和传统导盲杖[1]。盲道由于周遭的环境因素盲人无法完全依靠盲道获取信息;导盲犬虽然更为安全但是饲养成本高、尚未得到大众广泛认可,部分场所仍无法进入;传统导盲杖功能单一,无法获得准确信息。国外购置的监护设备价格昂贵[2-3],大部分人不具备购买能力。
针对这样的社会现状,本文设计并制作了一款视障人群安全监护系统。该系统包含光线检测模块、显示模块、语音播报模块、超声波测距模块,具有探测前方障碍物的距离、语音播报、在弱光环境下开启 LED 灯等功能。通过大量的实验测试,该设计在很大程度上保障了视障人群出行安全,达到了无忧出行的目的。
1 项目系统设计方案
本设计的硬件控制系统主要包括STC89C51单片机[4-5]、光线检测模块、语音播报模块、超声波测距模块[6]。采用STC89C51单片机作为监护系统的核心控制单元,控制以上几种模块正常运行。光线检测模块利用光敏电阻[7-8]采集光线信号,当光照强度低于设定阈值时,开启LED灯,提醒来往行人避让盲人。语音播报模块采用NY3P035语音芯片[9],可实时播报盲人与障碍物之间的距离。超声波测距模块利用超声波传感器测出人与障碍物距离,当距离小于人为设定的安全距离及时报警并报出当前与障碍物的距离,提醒盲人注意安全。本设计的系统总体设计方框图如图1所示。

图1 系统总体设计方框图
1.1 单片机模块
主控制器采用STC89C51单片机,该单片机所具有的优点是:高速、低功耗、超强抗干扰、接口多、指令代码兼容传统的8051、速度快、成本低,可以满足本设计的全部要求。
1.2 显示模块
本设计采用数码管进行显示。数码管具有显示速度快,使用简单,显示效果简洁明了,造价低,鉴于此系统不需要显示丰富的内容,因而本设计应用数码管便可以满足需求。
1.3 语音播报模块
本设计采用的语音芯片为NY3P035。方案成本极低,且此语音芯片内置电阻,没有外围元件,外围电路只需外接一个电容,测量时较为稳定。
1.4 超声波测距传感器
本设计采用HC-SR04超声波传感器[10-11],该传感器性能稳定、测量距离精确、模块精度高、盲区小且易于使用。
2 系统硬件设计
本设计的系统总体电路如图2所示。
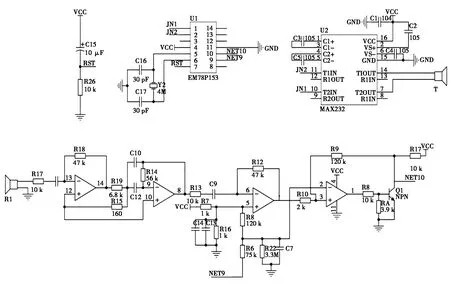
图2 系统总体电路图
本设计最大的特色是比传统的导盲工具更智能、方便,技术关键是在超声波的传播速度准确的前提下,测量距离的传播时间差值精度只要达到微秒级,就能保证测距误差小于1 mm的误差。使用的12 MHz晶体作时钟基准的89C51单片机定时器能方便的计数到1 μs的精度[12],因此系统采用89C51定时器能保证时间误差在1 mm的测量范围内。
3 系统软件设计
3.1 程序功能描述
1)按键实现功能:开关,复位,开启语音播报。
2)数码管显示:显示超声波测得的距离。
3)蜂鸣器报警:根据超声波测得的距离判断是否报警,以及报警强弱。
4)语音播报:按键按下后,播报当前所测得的距离。
5)光线检测:根据光线强弱,选择是否开启LED。
3.2 程序设计思路
1)数码管:采用三位共阳数码管,使用discode[]实现数码管段选,使用positon[]实现数码管位选,使用disbuff,显示小数点;
2)超声波测距:超声波的速度按340 m/s计算,由于往返路程需要x2,超出测距范围显示“—”。当距离<3 m时,蜂鸣器报警,且距离被测物体越近报警程度越高,语音播报时停止蜂鸣器报警。T0中断用来计数器溢出,超出定时时间未接收到超声波,显示“—”。T1中断用来扫描数码管和启动模块,2 s进入一次中断[7]。
4)光线检测:检测到弱光,开启LED灯;检测到强光,关闭LED灯。
5)语音播报:使用music();while(!BUSY);播报内容“当前距离几点几米”。
3.3 程序流程图

图3 系统主程序流程图
4 测试与结果
按照设计图将电路连接完毕,然后进行此次设计的硬件测试,先观察电路焊接是否有粘连,线路是否连通。接通电源后,先让系统处于不开机状态,检查各个模块有无异样,按下开关,观察黄灯是否亮起,若亮则说明硬件电路正常。紧接着进行硬件软件联调,先用装置靠近物体,一是测试显示距离与实际距离的误差,判断超声波测距是否准确。二是检测复位键和语音播报键功能是否实现。三是检测弱光条件下LED灯是否亮。四是检测蜂鸣器报警距离与程序设定是否一致。
通过以上测试过程及数据,可以得出以下结论:
1)当距离障碍物大于7 m时,数码管无法显示数据。距离在0~7 m均可显示:当距离小于3 m时,蜂鸣器开始报警,当距离小于0.3 m时,蜂鸣器持续报警。
2)语音播报可以实时播报当前离障碍物的距离。
3)光线检测系统可以准确检测光线强弱,设置白天黑夜模式。
本设计具有误差较小,稳定性强,灵敏度高的特点。并且在通电状态下,此装置可连续工作数小时以上,达到了可长时间携带并且对视障人士实施监护的目的,从而达到保障出行安全的目的。
5 结论
本文基于STC89C51单片机,设计并制作了一款视障人群安全监护系统。本设计可以事先由家人设定报警阈值,当盲人与障碍物之间的距离小于该阈值时,蜂鸣器报警,同时播报人与障碍物间的距离;光线条件较弱时,该装置可以自动检测环境并发出亮光,提示此处有人。该设计的创新性在于它是一款多功能的视障人群出行安全监护系统,兼具了以下几种功能:一是危险距离报警功能:由家人事先设定报警阈值,当与障碍物之间的距离小于该阈值时,装置开始报警;随着与障碍物之间的距离越近,报警频率越高,小于30 cm后持续报警;二是语音播报功能:可以实时播报与障碍物之间的距离,同时可以自主选择是否需要播报;三是光线检测功能:光线检测系统可以准确检测光线强弱,设置白天黑夜模式;该装置可以在光线较弱的条件下发出亮光,提示此处有人,行人可主动避让。上述功能的结合皆来源于当下的视障人群出行难题的社会现实,旨在为帮助到更多有出行问题的视障人士,期望可以达到为视障人群解决出行难题,无忧出行的目的,并且能多方位保证视障人群安全,让其安全便携出行。这样可以为其出行带来更多保障,为社会带来温暖,增进社会和谐。
