带负载扰动前馈补偿的PMSM模型预测控制
2022-06-20潘鑫磊张兴华
潘鑫磊,张兴华
(南京工业大学 电气工程与控制科学学院,南京 211816)
0 引 言
PMSM以其体积小、效率高、功率密度大等诸多优点,在电动汽车、船舶推进、轨道交通等领域应用广泛[1]。高性能的PMSM驱动系统一般采用矢量控制,其中转速环主要采用PI控制,算法简单、调节方便,但易受到电机参数变换和负载扰动等因素的影响[2-3]。因此采用有效的控制方法,提高PMSM驱动系统的动态性能与抗干扰能力,成为电机控制领域研究的热点。
模型预测控制是一种在线寻优闭环控制算法,广泛应用于过程控制系统[4]。近年来,该方法也被用于交流电机的控制[5-7]。文献[5]提出了一种基于无差拍电流预测控制和扰动观测器的复合控制方法,提高了永磁同步电机的电流响应速度,减小了稳态转矩波动。文献[6]提出了三矢量低开关频率模型预测控制策略,在永磁同步电机三矢量模型预测控制的基础上,把开关频率作为一项性能指标加入到代价函数中,有效降低变换器开关频率的同时,保持了驱动系统原有的动态性能。文献[7]在模型预测转速控制的基础上,引入了扩展卡尔曼滤波器对对负载转矩等未知参数进行估计来增强观测器的鲁棒性,提高了驱动系统的转速动态性能。
目前在PMSM的模型预测控制设计时一般不考虑负载转矩变化以及未建模动态的影响。而实际电机驱动系统中总是存在各种类型的扰动,为提高驱动系统的抗负载扰动能力,采用观测器估计负载扰动,通过在转速环引入负载转矩的前馈补偿是一个可行的解决方案。常用的负载转矩的观测方法包括模型参考自适应法[8]、全阶及降阶Luenberger观测器[9]和Kalman滤波器[10]等。
本文提出了一种带负载扰动前馈补偿的模型预测控制方法。采用模型预测转速控制器取代转速PI控制器,以提高PMSM驱动系统的动态响应性能。采用改进Luenberger观测器估计负载扰动,根据转矩估计值,对转矩电流进行前馈补偿,以减小负载转矩变化对转速控制的影响,增强电机驱动系统的鲁棒性。实验结果表明本文提出的控制方法有效可行。
1 永磁同步电机模型预测控制
模型预测控制方法根据当前时刻的系统输入、输出及状态来预测系统下一时刻的输出,根据预设的性能指标函数,在每一个控制周期内计算出最优控制量,通过滚动优化,实现精确的目标跟踪控制。
图1为永磁同步电机模型预测转速控制结构,其中外环转速采用模型预测控制(Model Predictive Control, MPC),模型预测控制器输出为q轴电流给定。内环电流控制采用典型的PI控制器,输出分别为定子电压的dq分量,经逆旋转变换后得到定子电压的αβ分量,后经空间矢量脉宽调制(SVPWM)生成逆变器开关信号。
2 模型预测转速控制器
PMSM的模型预测转速控制器主要由预测模型、反馈校正、滚动优化3个部分构成,图2为模型预测控制器的结构。
2.1 预测模型
对于面贴式永磁同步电机,为获得最大的转矩电流比,一般采用id=0控制策略,此时永磁同步电动机电磁转矩为
(1)
运动方程为
(2)
式中,ωm为电机转速,Te、T1分别为电磁转矩和负载转矩,B为粘滞摩擦系数,J为转动惯量,p为极对数,令T1为0,并对等式两边同时取拉普拉斯变换得频域模型为
(3)
根据传递函数的Z域离散化法,由上式经零阶采样保持后,得到永磁同步电机的离散Z传递函数:
(4)
由式(4)得差分方程为
(5)
两式相减得到永磁同步电机的转速预测模型为
ωp(k+1)=aΔiq(k)+(1-b)ωm(k)+bωm(k-1)
(6)
2.2 反馈校正
永磁同步电机运行时,电机参数(如电阻、电感以及磁链等)随着温升而变化,电机参数的变化会影响模型的预测精度,此外负载扰动和其他非线性等因素也会影响预测模型的准确性。预测转速与实际转速之间通常存在偏差,可采用反馈的方式对预测偏差进行校正。以kTs时刻实际转速与预测转速的误差e(k)作为补偿量:
e(k)=ωm(k)-ωp(k)
(7)
校正后的(k+1)Ts时刻的闭环预测转速为
ωpe(k+1)=ωp(k+1)+e(k)
(8)
2.3 滚动优化
本文设计的模型预测控制采用预测转速ωpe与期望转速输出ym误差平方和q轴电流增量Δiq平方的加权值作为性能指标函数。目的是用最小的电流控制增量,使电机转速跟踪由参考轨迹确定的期望转速输出。定义的性能指标函数F(k)为
F(k)=k1[ωpe(k+1)-ym(k+1)]2+k2[Δiq(k)]2
(9)
式中,k1,k2为加权系数,期望转速输出是从当前转速值向给定转速值过度的一条光滑曲线,其参考轨迹采用如下的一阶指数函数的形式:
ym(k+1)=αωm(k+1)+(1-α)ωref(k)
(10)
式中,α=e-Ts/,为期望转速参考轨迹时间常数,ωref(k)为系统的转速给定值。
为使F(k)极小,可令:
(11)
得:

(12)
则kTs在时刻的实际控制量表达式为
(13)
3 负载扰动观测器设计
当电机负载变化时,电机的转速输出将受到影响。为了减少负载转矩突变时对系统的影响,提高电机驱动系统的动态性能和抗负载扰动的能力,需要实时获取负载变化的信息。由于负载转矩难以直接测量,一般采用间接观测法,根据测量的电流值和转速等信息估计负载转矩。
3.1 观测器的结构
由电机运动方程,构造如下的一种改进的Luenberger负载扰动观测器:
(14)
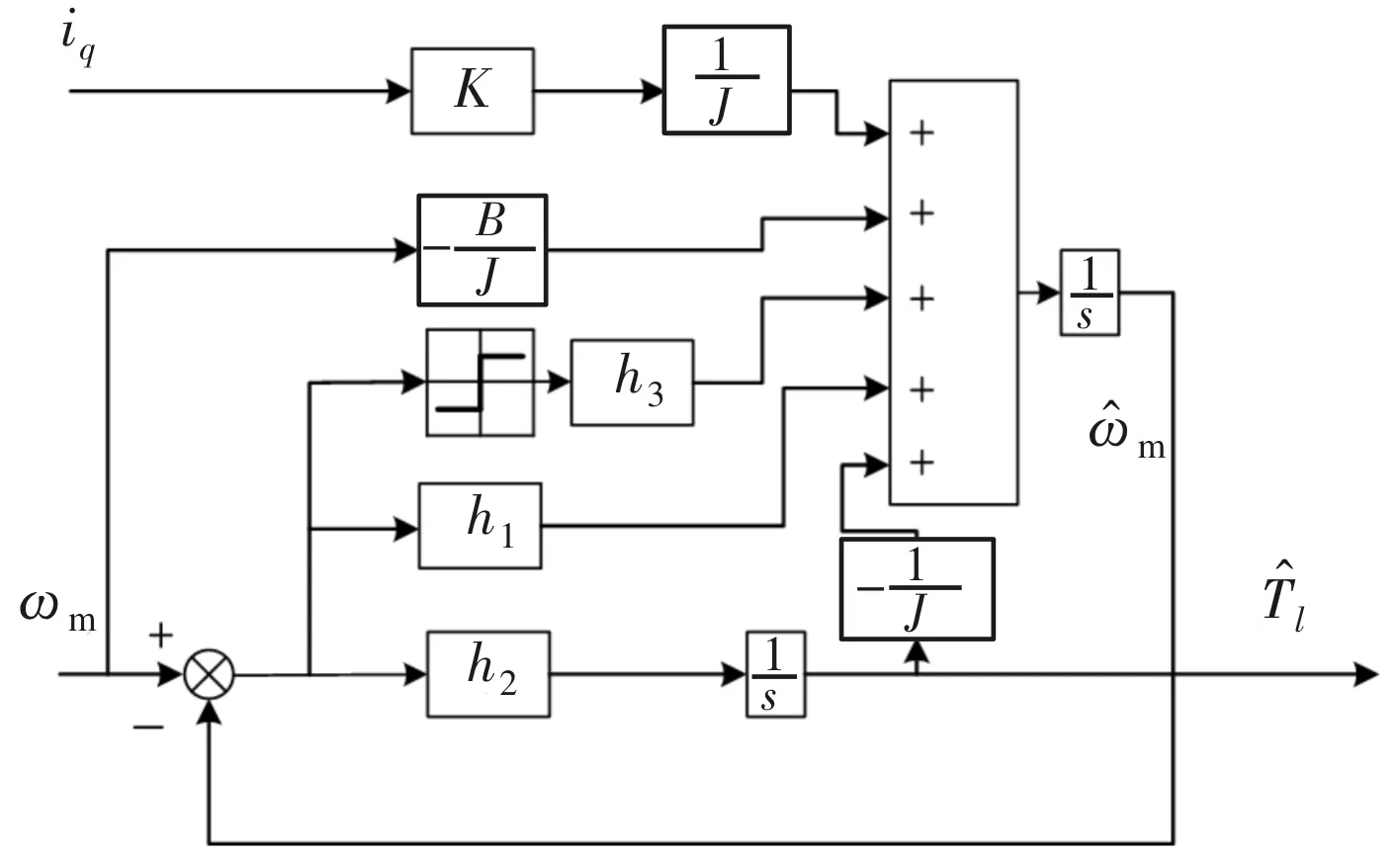
图3 负载扰动观测器结构
3.2 稳定性分析
定义如下的Lyapunov函数:
(15)

(16)
为满足电机的数字化控制实现的要求,需要对式(14)的观测器方程进行离散化,得负载观测器递推公式为
(17)
(18)
引入负载扰动前馈补偿后的永磁同步电机模型预测控制结构如图4所示。
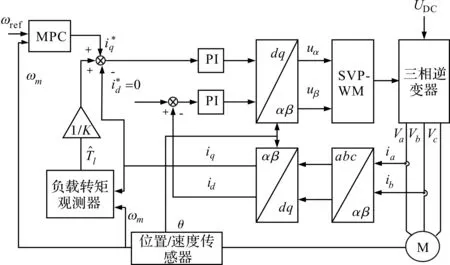
图4 带负载扰动前馈补偿的永磁同步电机模型预测转速控制系统结构
4 实验结果与分析
为了评估带负载扰动前馈补偿的PMSM模型预测控制方法的性能,在基于DSP(TMS320F28379D)的电机驱动控制平台进行了实验,图5是实验平台实物照片。实验中采用的电机参数如表1所示。

图5 电机实验平台
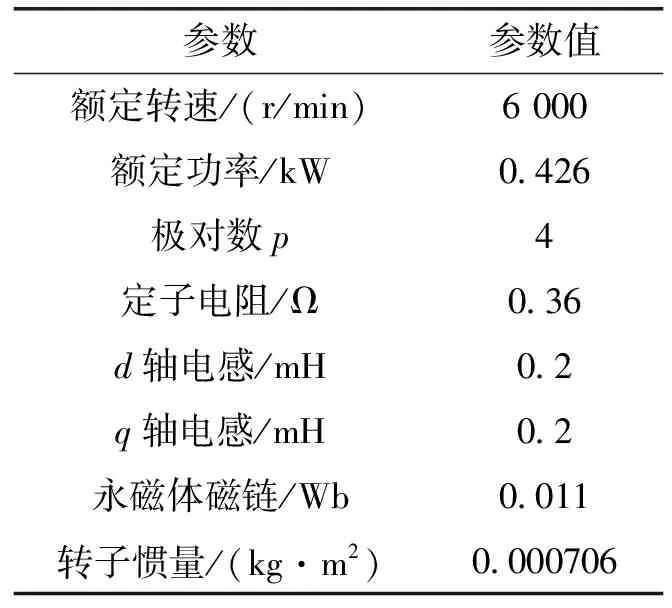
表1 电机参数
分别对传统PMSM模型预测转速控制(策略1)和带有负载扰动前馈补偿的PMSM模型预测转速控制(策略2)进行了驱动控制实验,对两种控制方法的控制性能进行了对比分析。
图6为本文提出的带有负载扰动前馈补偿的PMSM模型预测转速控制方法在空载起动上升到给定转速(600 r/min)并且突加 0.14 Nm负载时的实际转速实验波形。
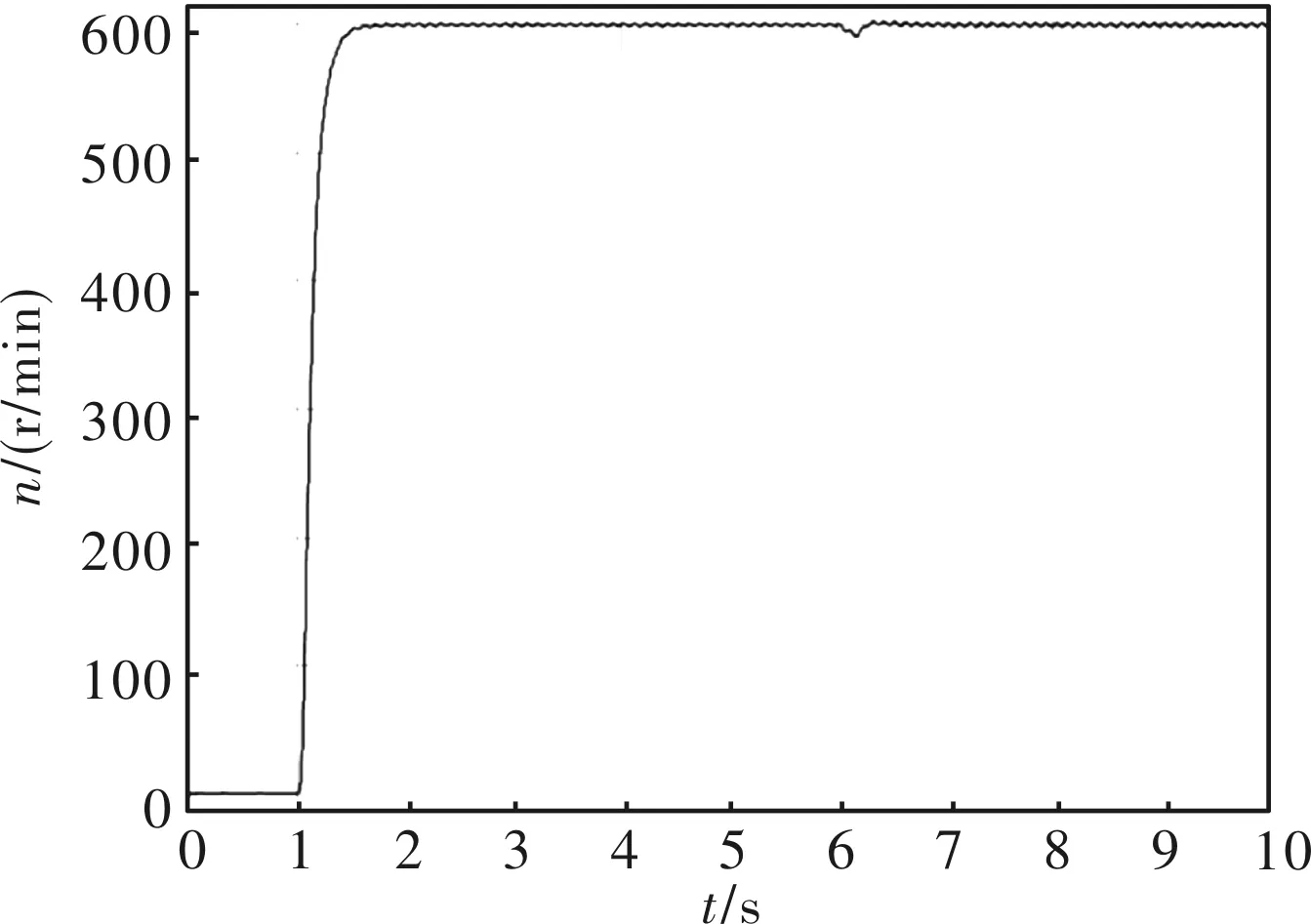
图6 带有负载扰动观测器的PMSM模型预测转速控制
由图6可见达到给定转速的时间约为0.5 s,且突加0.14 Nm负载时转速波动较小,具有良好的鲁棒性。

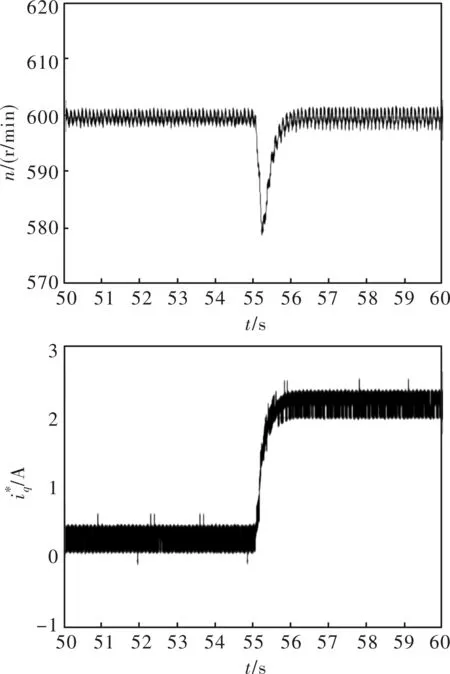
图7 传统PMSM模型预测转速控制(600 r/min)
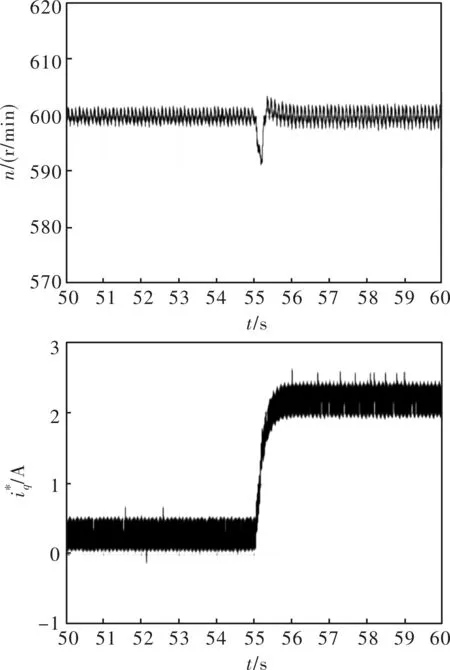
图8 带有负载扰动前馈补偿的PMSM模型预测转速控制(600 r/min)
由图7和图8可见两种控制策略在突加0.14 Nm负载时,策略1转速大约跌落20 r/min,转速恢复时间大约为0.8 s,策略2转速大约跌落9 r/min,转速恢复时间大约为0.5 s。
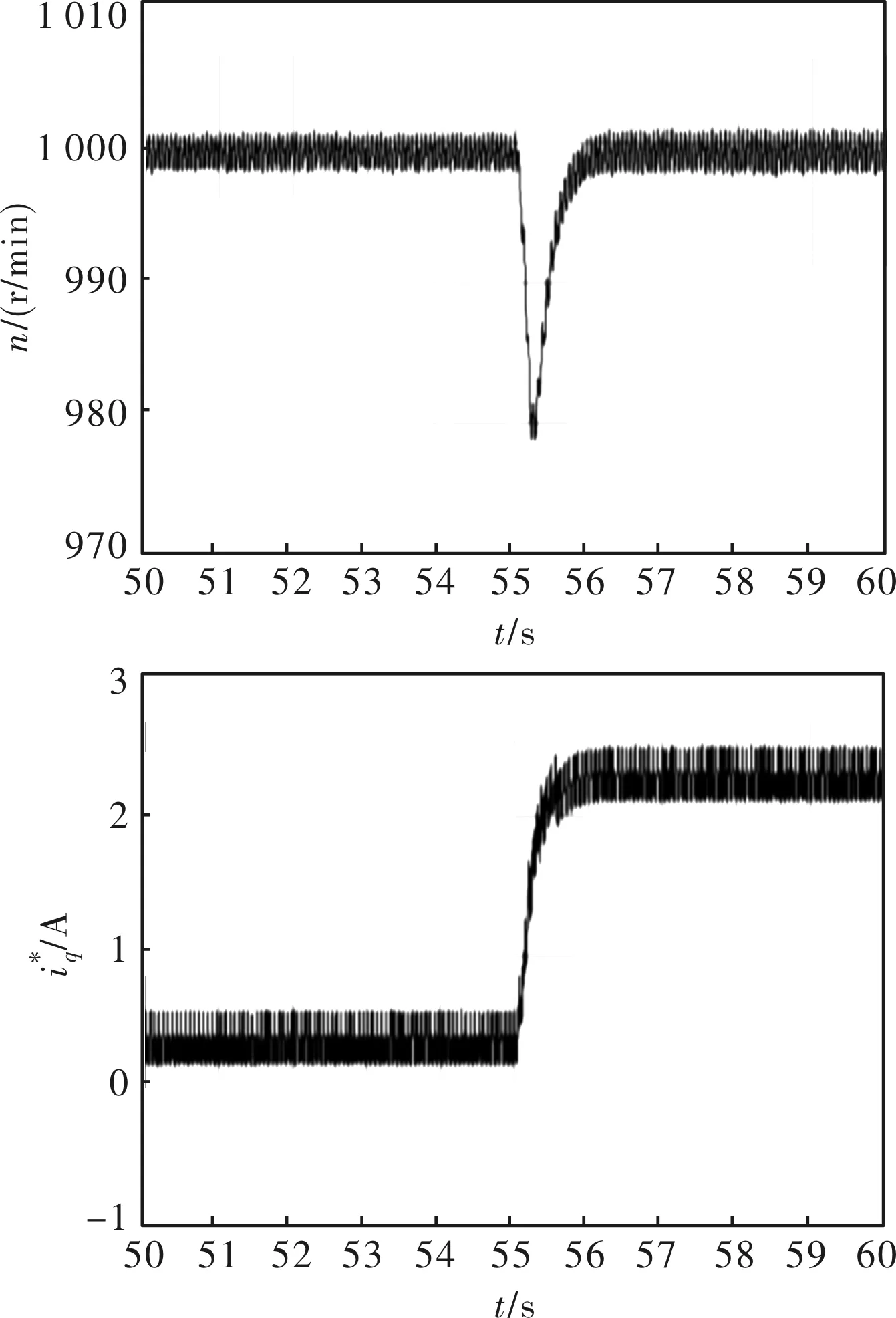
图9 传统PMSM模型预测转速控制(1000 r/min)
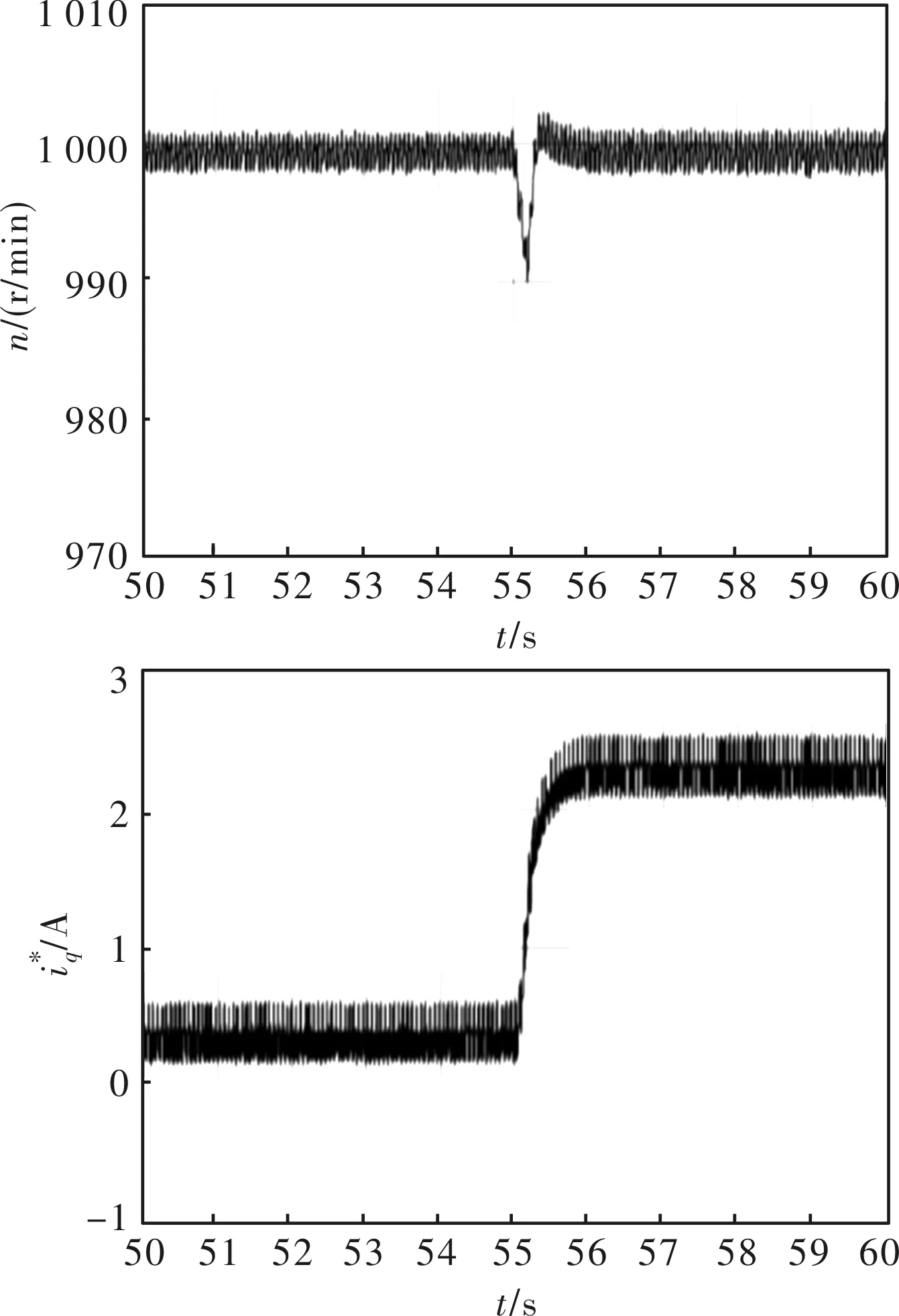
图10 带有负载扰动前馈补偿的PMSM模型预测转速控制(1000 r/min)
由图9和图10可见两种控制策略在突加0.14 Nm负载时,策略1转速大约跌落22 r/min,转速恢复时间大约为0.8 s,策略2转速大约跌落10 r/min,转速恢复时间大约为0.4 s。这表明两种控制策略在电机中低速运行时突加相同负载后,转速在轻微波动之后均能快速回到给定值,但策略2相比策略1转速跌落和转速恢复时间明显减小,表明所提控制策略具有更好的抗负载扰动性能,能有效抑制负载扰动对电机转速的影响。


图11 突加负载时及的波形
5 结 论
提出了一种带负载扰动前馈补偿的PMSM模型预测控制方法。采用一种改进的Luenberger观测器估计负载转矩,并进行电流前馈补偿。实验结果表明所提方法在保持PMSM模型预测控制快速动态响应特性的同时,有效地提高了系统的抗干扰能力。
