纵向静稳定度可调的鸭式气动布局设计与分析
2022-06-13刘荣健
刘荣健, 白 鹏
(中国航天空气动力技术研究院, 北京 100074)
引 言
在飞行器研制中, 质心和焦点的位置关系, 即静稳定度是一个至关重要的参数, 关系到飞行器的升阻比、 机动性等核心性能, 决定了飞行器能否稳定飞行, 直接影响到飞行控制系统的设计.
传统的工程实践中, 通常采用保证绝对静稳定性的设计, 即飞行过程中, 焦点始终位于质心后方, 由此保证飞行器受扰动后自动恢复到平衡状态. 随着计算机及自动控制技术的发展, 自20世纪70年代出现了主动控制技术, 即采用放宽静稳定性设计, 通过计算机实时控制舵面产生人工恢复力矩, 实现飞行器的闭环稳定飞行[1-4].
上述两种设计方法各自具有相应的优缺点. 静稳定设计相对风险较低, 飞控系统较简单, 易于实现, 甚至大量兵器型号采用无控设计, 但保持静稳定性的设计往往会造成飞行器的性能损失. 放宽静稳定性设计相对风险较高, 飞控系统复杂, 对传感器、 飞控计算机、 控制算法、 执行机构等控制元素要求很高, 但往往能带来飞行器性能上较明显的提升.
当前, 无论采用上述何种设计思想, 基本都是通过权衡部件安排被动适应实际飞行中焦点和质心的位置变化. 实际飞行中, 焦点的位置改变主要由于速度变化, 而质心位置的改变主要源自燃料消耗或载荷投放. 对于飞行速域较窄的飞行器而言, 导致静稳定度变化的主要因素是质心移动; 对于较宽速域的飞行器, 静稳定度的变化主要是焦点移动导致的, 或者焦点与质心同时改变导致的.
静稳定度的大幅改变可能会导致飞行状态的剧烈变化, 增加飞控系统的设计难度和复杂程度. 因此, 从降低飞控系统研发复杂度和成本的角度出发, 本文提出3种部件可变形方式以调整焦点的位置, 以期实现飞行器在飞行过程中保持较合理的静稳定度, 通过数值模拟的手段对3种方案进行了对比.

1 可变形鸭翼方案
传统设计中, 通过气动手段调节静稳定度一般通过鸭式布局实现, 但鸭翼往往为面积不变的固定式或全动式, 且位置固定, 因此调整焦点位置的能力相对有限. 针对上述不足, 基于一种面对称基础构型, 本文提出3种鸭翼方案以实现焦点位置的调整.
基础构型如图1所示, 采用旋成体机身、 三角翼、 梯形垂尾的翼身组合体面对称布局. 飞行器长3 m, 翼展1.524 m, 高0.575 m. 主翼前缘后掠角60°, 展弦比2.03. 垂尾前缘后掠角50°, 梢根比0.33.

图1 基础构型Fig. 1 Basic configuration
在基础构型基础上增加鸭翼形成鸭式布局. 由文献[5]可知, 在小攻角下, 鸭翼导致气动焦点的移动量近似与鸭翼容量成正比. 鸭翼容量VCe的定义如下
(1)
式中,SCe为鸭翼外露面积,SW为主翼面积, 也为参考面积,Lc为鸭翼焦点到飞行器质心的距离, 即鸭翼力臂,cA为平均气动力弦长.
由鸭翼容量的定义及其与焦点的关系可知, 若通过鸭翼调整焦点位置, 可改变鸭翼外露面积SCe或鸭翼焦点到质心的距离Lc.因此, 本文提出3种可变鸭翼形式: 分别为主要改变外露面积SCe的可变后掠鸭翼和伸缩鸭翼, 以及可变鸭翼力臂的滑动鸭翼.
1.1 可变后掠鸭翼
航空发展史上, 为了协调高低速气动特性的矛盾, 曾经出现了可变后掠机翼[6-9], 其典型型号有美国的F-111, F-14, B-1B; 苏联/俄罗斯的米格-23, 米格-27, 苏-22, 苏-24,图-22M,图-160; 欧洲的狂风等. 时至今日, 采用可变后掠翼技术的飞机仍处于大量服役状态. 此外, 大量的兵器型号采用了类似可变后掠翼的折叠机翼, 从发射筒或载机发射后展开弹翼飞行. 该技术相对比较成熟, 结构上较易实现. 因此, 本文提出可变后掠鸭翼以改变焦点位置.
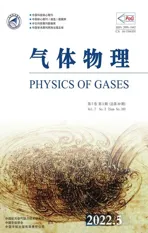
如图2所示, 弦长0.15 m, 展长为0.45 m的矩形鸭翼(单边)位于机身x=0.4 m站位处,鸭翼后掠角Λ从0°到60°变化. 鸭翼改变后掠角时, 外露面积改变, 由此改变飞行器的静稳定度.
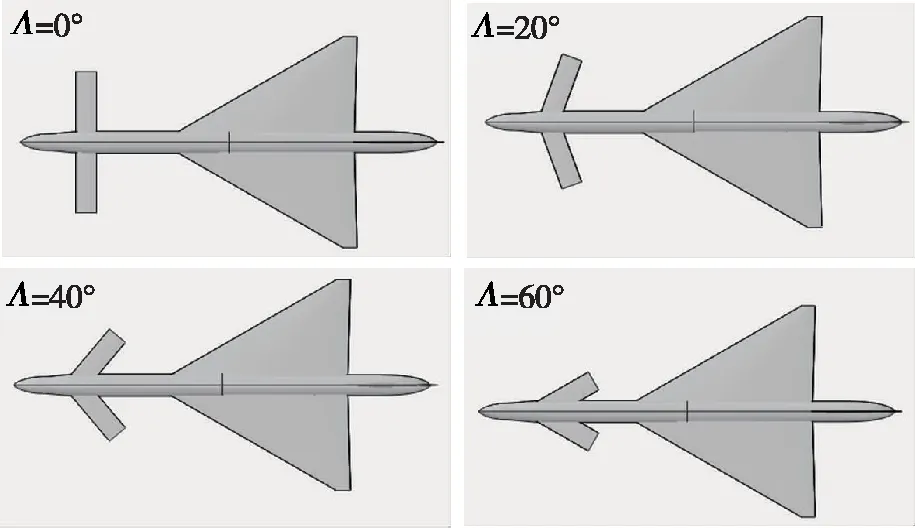
图2 可变后掠鸭翼构型Fig. 2 Variable sweep canard configurations
1.2 伸缩鸭翼
为了在不同飞行阶段获得合适的机翼平面形状, 研究者提出了伸缩式机翼概念, 即将机翼设计成类似拉杆天线的伸缩结构, 以改变机翼面积、 展长等参数. 相关研究可见文献[10-16].
本文将矩形鸭翼设计成伸缩结构, 沿前后缘平行方向伸展或收缩. 为方便对比, 采用 1.1节中后掠角Λ=40°, 弦长为0.15 m的矩形机翼, 位于机身x=0.4 m站位处, 沿前后缘平行方向进行伸缩, 伸缩量在0.3~0.6 m区间内变化, 为了便于描述, 将该量定义为伸出量s, 略去伸缩过程中弦长的细微改变量, 如图3所示.

图3 伸缩鸭翼构型Fig. 3 Stretch canard configurations
1.3 滑动鸭翼
上两节所述鸭翼变形方案均为以改变鸭翼外露面积为主要形式, 虽然其变形过程中鸭翼焦点距离飞行器质心的距离Lc也有改变, 但改变量较小. 从式(1)出发, 本文提出一种外露面积近似不变, 改变鸭翼力臂Lc的滑动鸭翼方案. 为便于对比, 选取 1.1节中后掠角为40°的矩形鸭翼方案, 沿机身轴线x前后移动, 移动范围为0.2~0.8 m, 忽略滑动机构可能对机身表面造成的外形改变, 如图4所示.

图4 滑动鸭翼构型Fig. 4 Slide canard configurations
2 数值模拟方法
为了对不同构型及参数组合下的飞行器气动特性进行评估, 采用商业软件Fluent开展数值模拟. 选用密度基求解器, 以提高高Mach数下的收敛性. 无黏通量采用AUSM格式离散, 并结合2阶迎风重构提高离散精度. 采用隐式时间推进法. 湍流模型采用气动特性分析中较为常用的Spalart-Allmaras模型. 为获得较好的网格质量及较少的网格总量, 采用多面体单元构筑全场网格, 为了更好地捕获边界层的流动, 在物面附近生成棱柱层网格, 并对机体前缘和翼前缘进行了局部加密, 网格单元总量约2.5×106, 如图5所示.
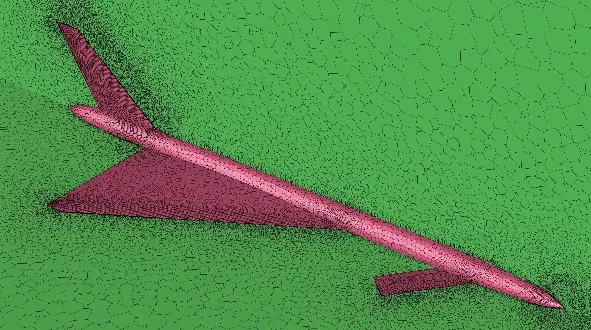
图5 计算网格Fig. 5 Computational meshes
3 结果及分析
应用Fluent软件, 对3种可变鸭翼构型进行数值模拟研究, 模拟Mach数为0.7, 1.2, 2.5, 5.0, 涵盖了从亚声速、 跨声速、 超声速到高超声速的典型状态. 由于焦点的概念只存在于小攻角线性范围内, 因此模拟的攻角范围为-2°~10°. 参考长度取飞行器平均气动力弦长0.938 m, 参考面积取主翼面积1.14 m2. 选取各状态下4°攻角对应的焦点位置进行对比.
如图6所示, 为可变后掠鸭翼构型不同Ma下焦点位置的对比. 为了直观展示位置关系, 这里给出的是焦点位置占飞行器全长的比例. 由图可知, 随着鸭翼后掠角增加, 飞行器的焦点位置向后移动. 后掠角越小, 随Ma变化焦点位置移动范围越大. 从焦点位置调节能力的角度来看, 随Ma增大, 可变后掠鸭翼的焦点调节能力逐渐减弱.
在本文研究的Ma范围内, 同样的飞行状态下, 全机升力系数和阻力系数随鸭翼后掠角增加均略微减小, 变化量均在5%以内. 相应的升阻比改变量近似可忽略不计.
图7为伸缩鸭翼构型不同Ma下的焦点位置. 可见焦点前移量与鸭翼伸出量成正比. 从亚声速到高超声速, 伸缩鸭翼的焦点调节能力呈先增大后减小的趋势, 即从亚声速到跨声速焦点调节能力增强, 从跨声速到超声速及高超声速焦点调节能力逐渐减弱. 值得注意的是, 在超声速和高超声速段, 鸭翼伸缩量s越大, 随Ma增加时焦点的移动量越小,s=0.6 m 时,Ma从2.5到5.0, 焦点位置近似不变.

图6 可变后掠鸭翼构型的焦点位置Fig. 6 Aerodynamic center of variable sweep canard configurations
图7 伸缩鸭翼构型的焦点位置Fig. 7 Aerodynamic center of stretch canard configurations
在本文研究的参数范围内, 随鸭翼伸出量s增大, 全机升力系数和阻力系数均有增长, 改变量均在8%以内, 升阻比改变量在4%以内.
图8为滑动鸭翼不同站位时焦点位置与Ma的关系曲线. 可知随鸭翼向后滑动, 焦点也向后移动, 反之亦然. 由曲线可知, 从亚声速到跨声速, 滑动式鸭翼焦点调节能力略微增强. 从跨声速到超声速, 焦点调节能力略微减弱. 从超声速到高超声速, 焦点调节能力近似不变.
在本文研究的攻角范围内, 跨声速到高超声速范围内, 滑动鸭翼导致的升力系数和阻力系数改变量均在1%以内. 在亚声速范围内, 滑动鸭翼导致的升力系数和阻力系数改变量在2%以内. 所有Ma下升阻比改变量为小量, 可忽略不计.
固定质心时, 考察采用上述3种手段时不同速域下静稳定度的最大改变量, 即采用不同调节手段时各自端点静稳定度值之差, 如表1所示, 此处的参考长度为平均气动力弦长.

图8 滑动鸭翼构型的焦点位置Fig. 8 Aerodynamic center of slide canard configurations
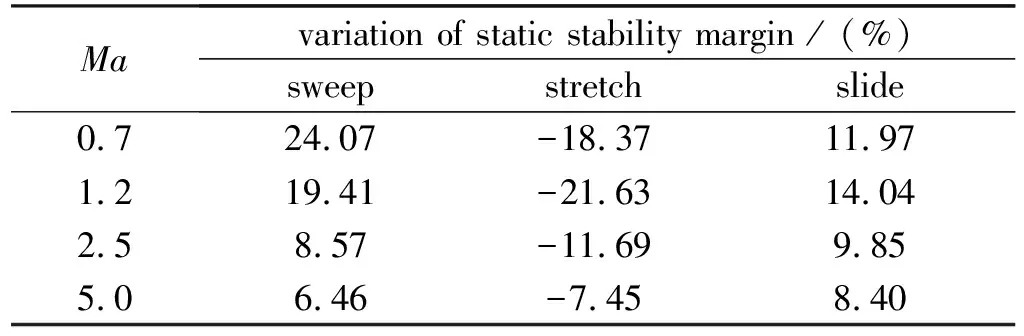
表1 静稳定度改变量
由表1可知, 3种调节方式在宽速域范围内均具备较强的纵向静稳定度调节能力. 在亚声速段可变后掠鸭翼具有最强的静稳定度调节能力; 跨声速段和超声速段伸缩鸭翼静稳定度调节能力相对最强; 高超声速段滑动鸭翼具有相对最强的静稳定度调节能力.
考虑如下情况, 选取飞行器的鸭翼构型为上文所述可变鸭翼构型的后掠角Λ=40°状态, 此时对应伸缩鸭翼构型的s=0.45 m状态; 以及滑动鸭翼的x=0.4 m状态. 假设在Ma=2.5的飞行状态下, 由于燃料消耗, 飞行器的质心前移, 使得飞行器的静稳定度由4%cA增加到了7%cA, 由此带来较大的配平阻力增加和机动能力的下降.
为了消除质心前移对飞行性能的影响, 可以通过上述3种鸭翼变形形式调整焦点的位置以适应质心的变化, 使飞行器保持合理的静稳定度4%cA. 通过焦点位置与鸭翼参数的关系建模及计算可知, 为了保持静稳定度4%cA, 需要将可变后掠鸭翼在40°后掠角基础上前掠37.5°, 即鸭翼后掠角改变为2.5°. 对于伸缩鸭翼, 需要在s=0.45 m的基础上将鸭翼伸出0.077 m, 即调整至s=0.527 m. 对于滑动鸭翼, 需要将鸭翼从x=0.4 m站位前移0.183 m, 即鸭翼站位调整为x=0.217 m. 计算结果表明通过3种鸭翼变形的方式均能将飞行器静稳定度调整至合理范围.
综上所述, 本文提出的3种可变鸭翼构型均可以实现在较宽的速域范围内通过改变焦点位置的形式调节飞行器的纵向静稳定度. 从结构、 机构实现的角度考量, 可变后掠鸭翼可借鉴较成熟的可变后掠机翼技术, 因此较易实现; 伸缩鸭翼可能会面对较严峻的结构强度以及热防护的问题, 工程实现难度较大; 滑动鸭翼不适合大尺寸的飞行器, 如宽速域飞机, 较适合小尺寸的兵器类飞行器, 如巡飞弹.
通过主动调节焦点位置, 可以在飞行控制系统较简易, 甚至无飞行控制系统的情况下保持飞行器在较宽的速域内焦点和质心位置的匹配, 使飞行器具有合理的静稳定度, 减小配平损失, 以提升飞行器的整体性能. 在飞行控制系统较完备、 功能较强的情况下也可以通过上述方式主动减小静稳定度, 使飞行器放宽静稳定度限制, 实现正升力配平.
4 结论
本文提出了3种可能的可变形鸭翼构型, 以期通过焦点位置的调整实现全机静稳定度的调节. 分别为可变后掠鸭翼、 伸缩鸭翼和滑动鸭翼. 通过计算流体力学的手段在Ma=0.7~5.0的宽速域范围内对3种可变鸭翼构型进行了气动特性的数值仿真研究. 结论如下:
(1)可变后掠鸭翼构型、 伸缩鸭翼构型、 滑动鸭翼构型均能在宽速域范围内进行有效的焦点位置调节.
(2)在本文研究的参数范围内, 亚声速段, 可变后掠鸭翼焦点调节能力最强; 跨声速和超声速段, 伸缩鸭翼焦点调节能力最强; 高超声速段, 滑动鸭翼焦点调节能力最强.
(3)从工程实现的角度, 可变后掠鸭翼较另两种方案更具备可行性.