旋翼尾流时空发展二维速度场的实验研究
2022-06-13齐中阳张卫国
齐中阳, 张卫国, 潘 翀
(1. 旋翼空气动力学重点实验室, 四川绵阳 621000; 2. 北京航空航天大学宁波创新研究院, 浙江宁波 315800; 3. 北京航空航天大学航空科学与工程学院, 北京 100191)
引 言
直升机因为其特殊的飞行性能, 在军事和民事领域得到了广泛的应用[1]. 旋翼作为直升机的主要气动力部件, 对直升机的飞行性能和可靠性等有直接的影响[2]. 但旋翼的尾流结构和气动力特性十分复杂, 具有非定常性、桨-涡干扰(blade-vortex interaction, BVI)特性以及桨尖涡流动等, 针对其流场的实验测量十分困难, 尤其现代直升机正朝着整体布局更紧凑、桨盘载荷更大、更灵活、机动性更高的趋势发展[3], 机身和旋翼之间的气动干扰问题也随之更加严重, 准确获知干扰下流场的信息也就变得更具难度和挑战性. 然而直升机流场分析是研究直升机空气动力学的重要方法和关键问题之一, 既是研究直升机气动特性的桥梁, 又是进一步研究直升机各种气动干扰现象的基础. 其中旋翼流动作为影响直升机流场和气动力特性的主要流动, 定量刻画旋翼流场、特别是尾流中旋涡运动的时空演化特性, 不仅是研究直升机的飞行性能、旋翼载荷、振动及噪声、操纵性及稳定性的基础, 也是深入分析直升机气动干扰特性的重要手段[4].
在旋翼流动研究中, 桨尖涡作为流动的主要特征之一, 是旋翼尾流中需要刻画的主要流动结构, 其形成机制以单片桨叶悬停状态的尾迹模型为例(见图 1), 在滑流假设下, 流动被旋翼加速, 增加了轴向的诱导速度, 导致滑流边界随着轴向距离的增加向旋翼轴方向收缩[5]. 另外, 桨叶旋转导致翼型上下表面附面层从桨叶后缘分离后形成了一个黏性层, 被称为涡面(vortex sheet), 而桨尖处由于翼展方向静压梯度和弦向逆压梯度的共同作用, 卷起并拖出一个很强的涡, 即为桨尖涡(tip vortex). 因为桨尖涡是旋翼尾迹三维非定常流动十分重要的现象, 显示、测量旋翼尾迹流场的桨尖涡就成为非常重要的研究内容. 目前研究者已经针对旋翼尾流中桨尖涡的研究总结了大量的定性和定量的流动显示及测量实验方法. 例如: 烟线显示及阴影摄像等方法测定旋翼滑流边界的收缩和桨尖涡的运动轨迹[6]; Pitot管、热线[7]、激光Doppler测速[8-9]和PIV[10]随着实验技术的发展依次用于旋翼尾迹速度分布的测量.

图1 桨尖涡和涡面模型[5]Fig. 1 Models of blade tip vortex and vortex sheet[5]
在流场显示方面, 20世纪50年代Dingeldein等[11]最先通过木屑进行旋翼尾迹的流动显示实验. Berenger等[12]进行了旋翼尾流的数值模拟和实验的对比研究, 并以此研究了旋翼尾流的形状. Sullivan等[13]通过在旋翼的桨尖部分设置喷烟孔进行了流显实验, 研究了直升机在悬停和前飞状态下的桨尖涡形状. Hilton等[14]首先成功地将阴影法应用到了旋翼桨尖涡的显示实验上, Tangler[15]通过纹影法也实现了桨尖涡结构显示. 之后, 纹影法被Parthasarathy等[16], Norman等[17], Leishman等[18]广泛应用于旋翼的尾迹测量, 取得了丰富的成果. Leishman等[18]的研究结果揭示了旋翼尾迹边界在经历从悬停到前飞状态过程中的变化, 并指出当前方桨叶的尾迹逐渐接近桨尖平面时会发生桨-涡干扰现象.
在流场测量方面, Boatwright[19]首先利用Pitot管测量了旋翼的流场. 到20世纪80年代, Caradonna等[20]、陈仁良等[21]和Tung等[22]都分别利用热线法对旋翼流场信息进行了测量. 之后, 激光Doppler测速仪(laser Doppler velocimeter, LDV)测量技术以非介入测量特点在旋翼流场的测量中得到了广泛应用. Maryland大学和Ames研究中心[23]都做了十分深入的研究, 通过LDV技术测量了桨尖涡沿直径方向的速度分布. Mahalingam等[24]利用LDV技术测量了小速度前飞状态下旋翼桨尖涡的结构和发展过程. 随着测试技术的发展, PIV技术开始运用到直升机空气动力学领域. 2000年, Maryland大学的Martin等[25]首次利用PIV技术测量了模型直升机旋翼的桨尖涡. NASA[26]开展了在悬停状态下旋翼尾迹的三维PIV测速实验, 研究了桨尖涡位置不稳定的现象, 并对桨尖涡的位置和涡量强度做了测量, 同时对比了单个测量结果的瞬时速度场与多次测量结果的平均速度场的不同. 此外, 上海交通大学的刘应征和中国空气动力研究与发展中心的张卫国等通过在旋转桨叶表面涂快反应压敏漆进行了旋翼前飞和悬停状态下的桨叶表面压力非定常测量[27]. 中国空气动力研究与发展中心的杨永东等[5]利用热线风速仪对悬停和前飞状态下某旋翼模型的尾流场进行了测量. 唐正飞等[28]利用三维激光测速仪对共轴式双旋翼悬停流场做了测量, 解释了旋翼之间的干扰作用和机理. 中国空气动力研究与发展中心的杨永东等[29-30]也对悬停及前飞状态下的旋翼尾迹做了LDV和PIV流场测量.
综上所述, 旋翼尾流流场被大量研究, 但桨尖涡的时空发展还存在欠缺, 而尾流流场的时空演化特性是深入理解旋翼噪声产生机理和控制机理的基础. 因此本文针对旋翼尾流中的桨尖涡结构, 开展二维PIV测量研究, 通过锁相测量, 获得旋翼在典型工况下二维速度场的时空演化信息, 为分析气动噪声提供基础性的流场数据.

1 模型与实验
1.1 模型和实验装置
实验模型为常规直升机桨叶的等比缩小模型, 其结构如图2(a)所示, 展长为70 mm, 弦长为20~30 mm, 旋转桨盘直径为150 mm, 实验绕旋转轴等距布置4个相同桨叶. 桨盘直接安装在一个直流电机上, 见图2(b), 通过电机转动带动桨叶旋转. 电机的额定电压为12 V, 最大转速为 4 000 r/m. 本研究使用的PIV设备采样频率较低, 限制了测量结果的时间解析能力, 因此本文在测量转速能力范围内, 选取最大的研究旋翼转速为250 r/m. 为了避免周围流动干扰, 整个模型装置安装在如图2(b)所示的观察箱中, 观察箱的框架由40 mm铝型材搭建而成, 四周和上表面用亚克力板封装, 下表面与地面之间留有缝隙, 保证流动出口. 观察箱的横截面为边长1 200 mm的正方形, 尺寸远大于桨盘直径, 减小观察箱四周壁面对桨尖涡流动的干扰. 观察箱高度为2 000 mm, 桨盘安装位置距离观察箱上壁面300 mm, 距离地面大于1 700 mm, 保证桨尖涡流动充分发展.

(a) Blade (b)Blade installation 图2 实验模型与安装Fig. 2 Experimental model and installation
1.2 PIV实验技术
图3所示为PIV实验布置示意图, 激光器为LABest公司生产的PIV-350双脉冲 Nd:YAG 激光器系统, 其光波的波长为532 nm, 脉冲能量5档可调, 两个脉冲的时间间隔及频率均可调节, 能量最高可调至350 mJ, 最高频率为15 Hz. 此外, 一根长1.8 m的导光臂用于光路引导, 一个可调节片光厚度的片光头使片光束腰处厚度在1~6 mm范围内可调, 保证激光片与旋翼转轴平行. CCD相机为B29M2高分辨率相机, 分辨率为6 600 mm×4 400 mm. 实验过程中, 相机焦距为105 cm. PIV实验时, 相机距离激光片70 cm, 观测区域尺寸为210 mm×140 mm. 拍摄区间的激光厚度为5 mm, 两束激光时间间隔为70 μs, 曝光时间为135 μs. 实验过程中, 采集频率为1 Hz, 针对锁定相位流场重复采集1 000次.

图3 PIV测量实验布置示意图Fig. 3 PIV layout diagram
1.3 相位锁定技术
本研究通过PIV技术对旋翼尾流, 尤其是桨尖涡结构进行刻画, 但旋翼转速快, PIV时间解析能力受到限制, 无法准确刻画旋翼尾流特性. 因此将PIV技术融合相位锁定功能, 发展锁相PIV技术, 保证在旋翼尾流测量过程中, 准确捕捉到特定相位下的瞬时流场结构. 本文定义旋翼转动过程中, 所拍摄桨尖涡的发生桨叶与激光片重合相位为0相位, 即为本文测量相位.图4为相位锁定系统示意图, 确定旋翼拍摄相位角, 在该相位角状态下, 固定位置设置触发开关, 通过Hall传感器对触发开关进行捕捉, 在旋翼旋转过程中, 每次Hall传感器捕捉到触发开关, 即刻发出信号, 通过示波器记录传感器发出的信号, 同时同步器发出指令, 触发激光和CCD相机, 进行PIV测量采集. 保证对旋翼运动过程中固定相位状态下的瞬时流动结构进行相位准确的多次采集. 实现了伪时间解析的二维速度场测量并抑制了瞬态PIV测量的较高误差问题.
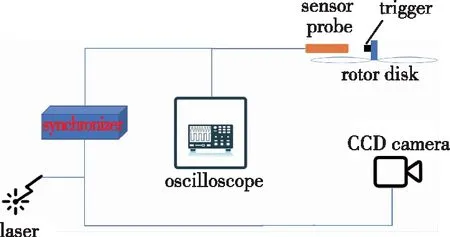
图4 相位锁定系统示意图Fig. 4 Schematic of phase lock system
2 结果与讨论
2.1 旋翼尾流速度场
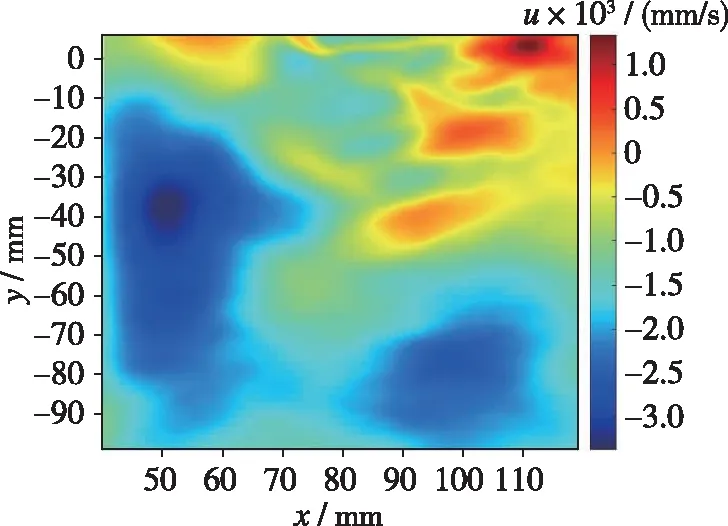
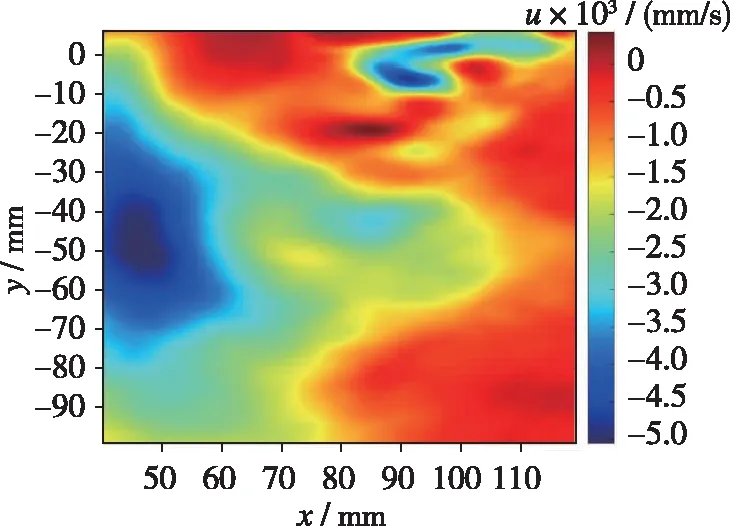
图5为旋翼尾流x和y方向的速度矢量分布云图, 定义旋翼的展向为x方向, 轴向为y方向. 通过旋翼桨盘直径D=150 mm, 对模型坐标进行无量纲化处理.图5(a)为0相位下, 通过相位平均得到的x方向速度矢量分布云图. 从图中可以看出, 对称桨叶桨尖位置x方向速度的方向相反, 速度接近200 mm/s. 随着桨尖涡的发展, 发展到(0.1, 0.05)和(0.5, 0.05)位置的第1层涡面结构的x方向速度变为100 mm/s, 随着桨尖涡向下发展, 速度呈现递减趋势, 且涡面结构向轴心移动, 且轴向被拉长, 主要因为桨盘下出现真空区域, 诱导涡向中间发展.图5(b)所示为相同条件下y方向速度矢量分布云图.最大y方向速度400 mm/s 发生在桨盘下方(0, 0.2)和(0.6, 0.2)位置. 云图呈现射流结构, 且随着轴向距离增大, 两个射流结构向对称轴发展并相互耦合. 因为旋翼旋转过程中, 气流向下, 产生升力, 因此y方向速度主要表现为旋翼旋转的下洗流动.
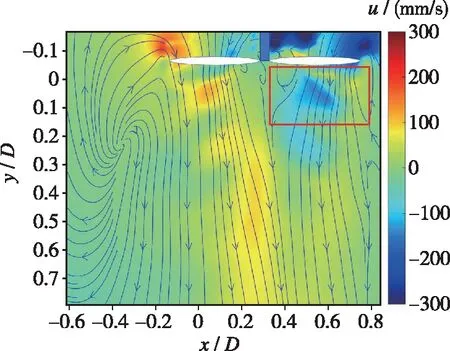
(a) Velocity vector in x-direction
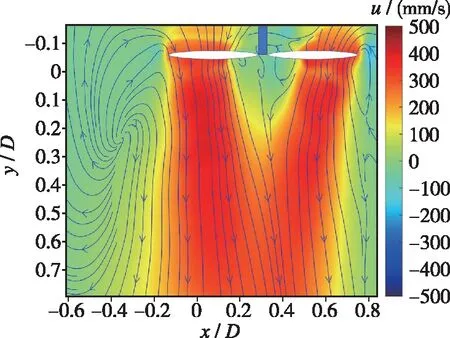
(b) Velocity vector in y-direction图5 速度矢量分布Fig. 5 Distribution of velocity vector
2.2 旋翼尾流速度场分析
根据Wang等[31]通过本征正交分解(proper orthogonal decomposition, POD)对PIV数据进行分析的方法, 同时为了进一步分析流场结构, 提取流场主要含能模态, 本文选取包含第1层涡面结构的区域进行POD分析, 区域位置在图5(a)框出, 其尺寸为400 mm×300 mm(2.7D×2D).
图6所示为选定区域经POD分解得到的模态能量分布曲线, 共分解出436阶模态.图6(a)为相关能量累积曲线, 随着模态阶数的增加, 累积曲线上升至100%.图6(b)为各阶模态的相对能量变化曲线, 选取1~10阶进行能量展示. 从图中可以看出, 第1阶模态的相对能量为18%, 随着阶数增加, 模态相对能量迅速下降, 在第4阶处便已下降至6%, 且前4阶模态的含能总量达到了42%, 因此, 本文选取前4阶模态进行流场刻画与分析.
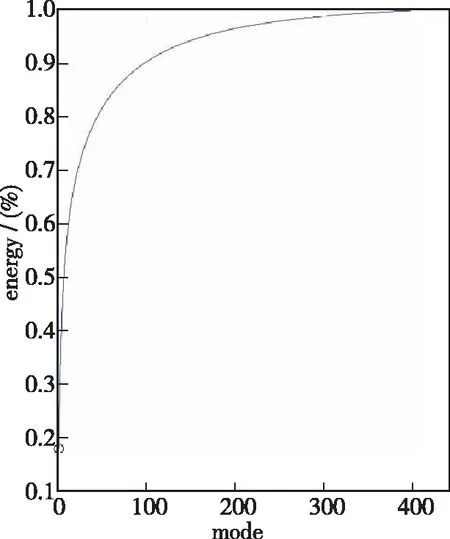
(a) Relative energy accumulation
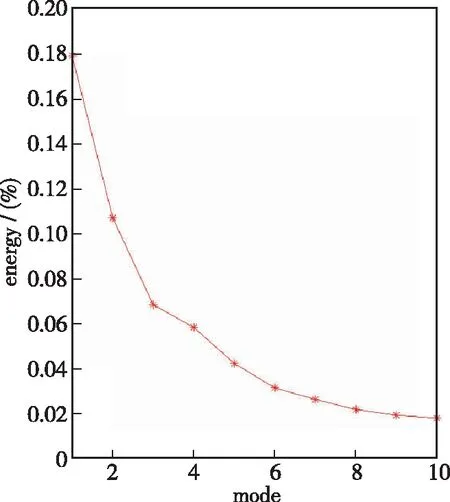
(b) Relative energy in each mode
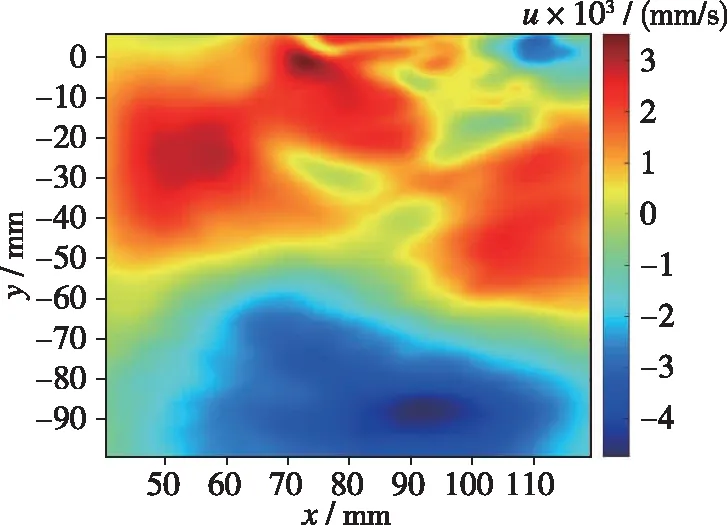
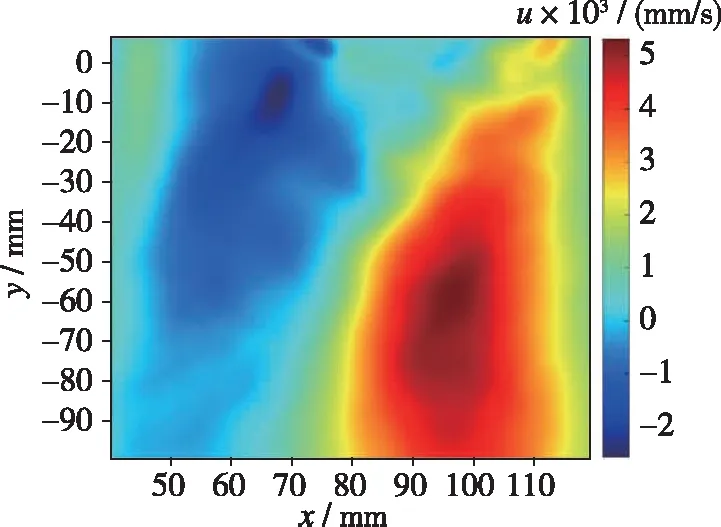
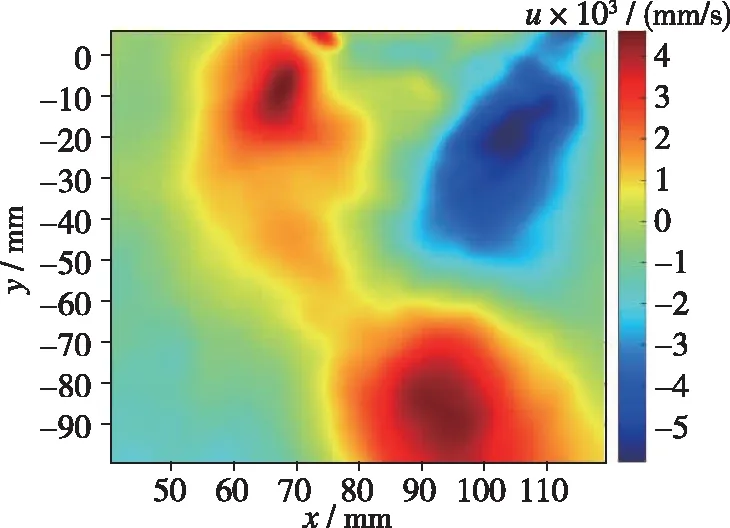
图7为对图5(a)中x方向速度分量进行POD分解得到的1~4阶模态云图.图7(a)展示了第1阶模态的特征, 在(50 mm, -40 mm)处体现了与全流场(见图5(a))相同流向的脉动流动结构, 占整个流场湍动能的18%, 为含能量最大、尺度最大的第1层涡面结构展示.图7(b)展示了第2阶模态的特征, 其能量占整个湍动能的11%, 在(55 mm, -45 mm)处也展现了与全流场(见图5(a))相同流向的脉动流动结构, 同样为清晰的第1层涡面结构. 此外, 在(95 mm, -5 mm)位置出现一个与第1层涡面方向相同的结构, 为桨尖涡结构.图7(c), (d)分别展示了第3, 4模态的特征, 结构的不规则性增强, 表现为多旋翼涡面之间的耦合影响.
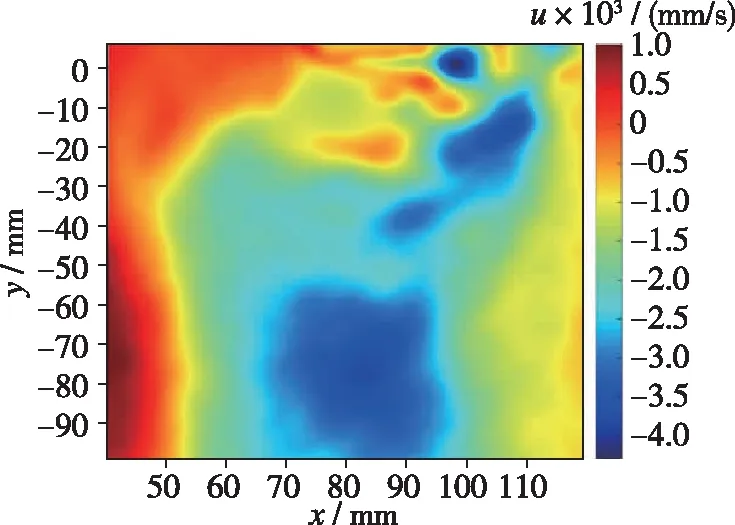
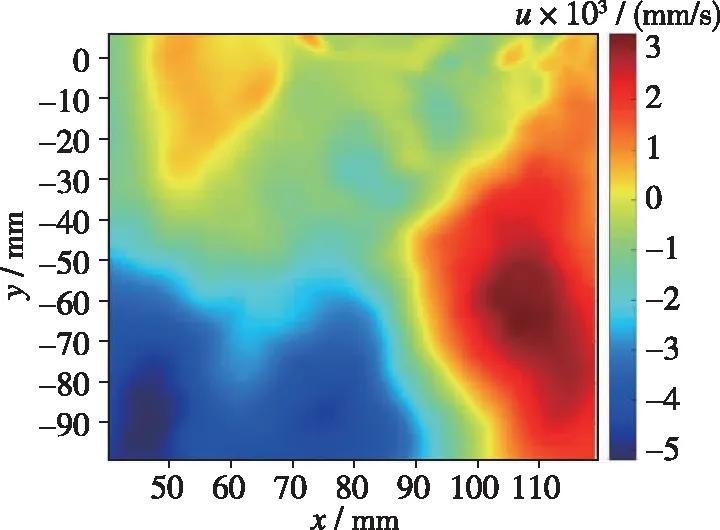
图8为对图5(b)中y方向速度分量进行POD分解得到的1~4阶模态云图.图8(a)展示了第1阶模态的特征, 该模态占整个流场湍动能的18%, 因此与全流场相似, 展现了明显的射流结构(图中左侧), 且向旋转轴心偏移.图8(b)展示了第2阶模态的特征, 发现在该模态, 射流结构减弱, 且在(95 mm, 0 mm)位置同样出现明显的桨尖涡结构, 说明在这个分析区域, 桨尖涡对湍动能的贡献弱于第1层涡面.图8(c), (d)分别展示了第3, 4模态的特征, 同样结构的不规则性增强, 表现为多旋翼涡面之间的耦合影响.
(a) Mode 1: velocity vector in x-direction
(b) Mode 2: velocity vector in x-direction

(c) Mode 3: velocity vector in x-direction
(d) Mode 4: velocity vector in x-direction
(a) Mode 1: velocity vector in y-direction
(b) Mode 2: velocity vector in y-direction
(c) Mode 3: velocity vector in y-direction
(d) Mode 4: velocity vector in y-direction
3 结论
本文通过PIV测量和锁相技术相结合, 针对悬停状态下的旋翼尾流速度场进行测量, 旋翼转速为250 r/m, 并对测量结果进行POD降阶分析, 揭示流场的主要含能模态和结构特征, 主要结论为:
(1)旋翼尾流发展过程中向旋转轴靠近, 二维结果呈现倒三角结构, 即扩展到三维流动中会呈现倒锥型结构的特性;
(2)通过POD分析, 旋翼尾流中对湍动能贡献最大的为桨叶涡的结构, 其次是桨尖涡结构.
致谢本文受到旋翼空气动力学重点实验室开放课题(RAL20200203-2)资助.