考虑气储惯量互补的多能直流微网运行控制策略
2022-06-08吴鸣吕志鹏王鑫杨万里周珊刘晓娟
吴鸣,吕志鹏,王鑫,杨万里,周珊,刘晓娟
(1.国网上海能源互联网研究院有限公司,上海 200120;2.湖南大学国家电能变换与控制工程技术研究中心,湖南 长沙 410082)
伴随能源危机和环境污染问题日益突出,能源问题成为可持续发展亟待解决的难题。近年来,多能互补直流微网被认为是解决能源相关问题的替代方案之一。多能互补直流微网无需对电压相位、频率进行控制,其具有可控性与可靠性较高,能源利用率高、运行经济成本低、环境污染小与系统稳定性强等优势[1-2]。当前对多能互补直流微网的研究在全球范围内迅速开展。
目前,多能互补直流微网多采用直流母线分级式控制策略[3],但分级式控制仅能保证微网电压在一定范围内保持稳定,母线电压变化会影响各个微源的运行方式,进一步加剧直流母线波动。文献[4]提出一种无需储能的光伏直流微网调压策略,但其微网结构单一,新能源利用率较低。文献[5]提出混合能源微电网自主协调二段下垂控制策略,该控制策略可实现混合微网功率平衡,但未考虑不同微源本身惯量特性。目前关于多能互补微网研究主要以风光储型为主,对包含微型燃气轮机等其他能源考虑较少,微网结构较为单一。文献[6]提出了光伏微燃机混合微网协调控制策略,但均在并网工况下进行验证,未考虑微燃机惯量延迟特性;文献[7]提出了以微燃机为主要协调单元的直流微网主从控制策略,同样未考虑微燃机惯量延迟特性;文献[8]提出超级电容与微燃机瞬时功率平衡控制,但该控制基于功率输出预测,因此对系统本体参数精确度需求高、计算量大。
基于上述研究现状,本文以含风光气储四种能源的典型多能互补直流微网为背景,综合考虑系统并离网等多种运行工况,提出了考虑气储惯量互补的多能直流微网运行控制策略。针对系统内微型燃气轮机响应具有大惯量延迟特性无法快速响应负荷变化的问题,提出以储能电池小惯量特性与微燃机进行互补的控制方法。最后基于Matlab/Simulink仿真平台搭建仿真模型,开展不同工况下多能互补直流微网的运行特性研究,仿真结果验证了所提系统运行策略与气储惯量互补控制方法的正确性和有效性。
1 系统拓扑结构
典型多能互补直流微网中的分布式能源主要包括微燃机、风机和光伏阵列。而受环境等因素的影响,风能和太阳能的出力均极具波动性和间歇性。为改善整个发电系统新能源动态特性,可引入储能电池与微燃机,充分发挥微燃机输出功率可控的优势,并降低风光与负荷不稳定所带来的负面影响。
1.1 多能互补直流微网系统
多能互补直流微网供电系统图如图1所示。系统总装机容量135 kW,其中包括:一台65 kW微型燃气轮机、一台30 kW异步风力发电机、峰值功率40 kW的光伏阵列及容量为100 kW·h储能电池组。系统中负载每h最大用电为100 kW(交流负载60 kW、直流负载40 kW)。

图1 多能互补直流微网供电系统图Fig.1 Multi-energy complementary DC microgrid power supply system
配电网通过变比为10 kV/0.4 kV的变压器与微网系统AC端口1相连,图1中PG为配电网发出功率;Pmt为微燃机发出功率;Pw为风机发出功率;Pac为负载功率;Pb为电池发出功率;Ppv为光伏阵列发出功率;Pdc为DC负载功率。
1.2 交直流端口拓扑结构
交流(AC)端口由三相变流器(voltage source converter,VSC)组成,直流端连接800 V直流母线,交流端连接电网、微燃机、风机及AC负载。直流(DC)端口由双向Buck-Boost变换器组成,一端连接800 V直流母线,另一端连接储能电池、光伏阵列、DC负载。交直流端口拓扑结构如图2所示。
2 气储惯量互补控制策略
微燃机本身具有大惯量特征,其输出功率响应具有10 s左右延时[9],离网时无法通过微燃机直接控制直流母线电压,通常采用微燃机与储能电池互补方式保证离网时各种运行状态的可靠供电。本文提出气储控制方法:用储能电池控制直流母线电压(C-Udc),微燃机控制储能电池恒荷电状态(state of charge,SOC)的方式,微燃机可间接控制直流侧母线电压,实现储能电池小惯量与微燃机大惯量互补利用。
2.1 气储响应特性分析
为简化分析,本文忽略采样周期延时与变换器损耗环节,将电流内环传递函数与微燃机整体传递函数等效为一阶惯量延迟环节。
储能电池控制直流母线框图如图3所示。
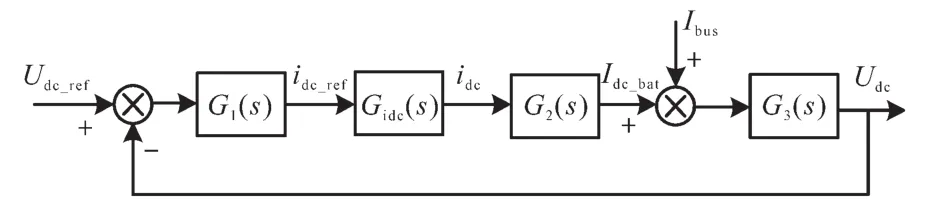
图3 储能电池控制直流母线电压框图Fig.3 Block diagram of battery control DC bus voltage
图3中各变量计算公式如下:

式中:Ibus为直流母线中风、光、交直流负载电流之和;G(1s)为外环PI环节;kdvp,kdvi分别为DC/DC变换器外环比例、积分参数;Gid(cs)为DC/DC变换器电流内环等效延迟环节;Ti为内环等效惯量参数;G(2s)为DC/DC变换器变比;G(3s)为直流电容等效环节。
根据图3储能电池C-Udc控制框图,可推导出其闭环传递函数G(bs)为

通过单位阶跃信号模拟负载突变,对储能电池传递函数进行分析,可以得到储能电池动态响应特性如图4所示,c(t)为单位阶跃信号下的储能电池与微燃机响应振幅。当负载突变后储能电池可在0.2 s内快速响应负载变化。

图4 储能电池与微燃机单位阶跃响应图Fig.4 Battery and micro-turbine unit step response diagram
微燃机控制母线电压框图如图5所示。
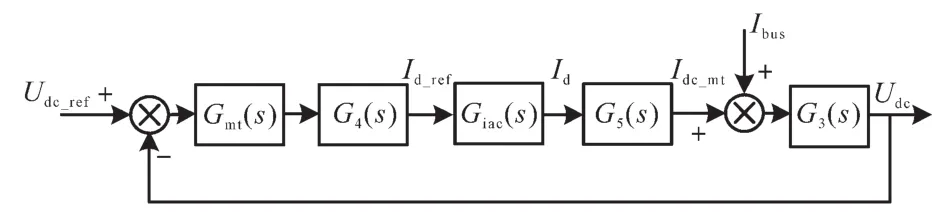
图5 微燃机控制直流母线电压框图Fig.5 Block diagram of micro-turbine control DC bus voltage
图5中各变量计算公式如下:

式中:Gm(ts)为微燃机等效惯量环节;Tmt为微燃机等效惯量参数;G(4s)为外环PI环节;kavp,kavi分别为外环比例、积分参数;Gia(cs)为电流内环等效延迟环节;Ti为内环等效惯量参数;G(5s)为VSC变换器增益;m为调制比,通常取1;G(3s)为直流电容传递函数。
根据图5所示的微燃机C-Udc控制框图,可得到微燃机对直流母线电压闭环传递函数Gmt(bs)为

如图4所示,当负载突变后,微燃机大受其惯量特性影响,其响应负载变化时间10 s左右。因此若直接采用微燃机控制直流母线电压方式,直流母线电压会发生较大波动造成系统崩溃。当直流母线电压仅受控于储能电池单元时,其动态响应速度快,但维持系统长期稳定则对储能单元的容量提出更高要求。而采用微燃机与储能电池互补方式可大程度降低储能电池规划容量,进而降低系统整体成本。
2.2 气储互补控制策略
2.2.1 储能电池控制策略
在并网模式时,储能电池外环采用恒定SOC控制方式,维持储能电池SOC保持在60%(本文电池充放电范围限制在30%~90%之内,因此选择中间值60%作为备用状态),为离网状态做准备。外环ΔSOC通过PI与电流限幅器(限制充放电电流)产生参考电流信号idc_ref。最后经过电流内环与PWM环节产生占空比调制信号D*。
在离网模式时,由储能电池控制直流侧母线电压,维持母线电压稳定在Udc_ref=800 V。直流母线的功率波动首先经过母线电容,由于电容通高频阻低频特性,其高频分量被直流电容滤除。其余功率缺额反应在直流母线电压的突变上,储能电池通过直流电压反馈控制补偿直流母线的短时功率波动。
2.2.2 微燃机控制策略
本文主要针对微型燃气轮机惯量特性与其三相变流器控制策略进行分析,由于篇幅限制,不再对微燃机本身建模进行叙述。
并网时微燃机不工作,离网时微燃机采用储能电池荷电状态控制方式。微燃机控制维持储能电池SOC,ΔSOC通过PI与限功率(最小输出0,最大输出65 kW)环节,产生参考电流信号。在气储互补工况下,当储能电池SOC受直流侧功率影响发生变化时,微燃机根据电池的荷电状态波动调整其输出功率,直至匹配直流侧功率缺额,同时给储能电池进行充电,使电池的SOC维持恒定。
微燃机与储能电池互补控制如图6所示。

图6 气储互补控制系统结构图Fig.6 Structure diagram of gas and battery complementary control
气储互补控制策略利用储能电池小惯量特性,使储能电池快速响应直流侧功率突变的短时功率缺额,微燃机则根据电池SOC缓慢调整其出力,直至完全匹配直流侧功率缺额并维持电池SOC恒定。由于所提出的惯量互补控制中储能电池仅在功率突变短时间内进行补偿,因此可在一定程度内降低储能电池规划容量。
2.3 风、光、交直流负载控制策略
光伏发电系统采用最大功率点跟踪(maximum power point tracking,MPPT)控制实现光伏发电效率最大化[10],在风光限功率运行时采用恒功率(C-P)控制。风力发电系统同样采用MPPT实现风能最大利用[11]。直流负载端口3采用定负电压(C-udc)控制策略保证直流负载在并离网时正常供电。交流负载端口4采用恒定交流侧电压与频率(V-F)控制策略,保证交流负载在并离网时正常供电。
3 微网系统运行工况
基于集中通信系统对微网系统信号进行采集处理。
本文根据以下三个原则:1)保证负荷供电,风、光、气输出功率与系统负荷消耗功率匹配;2)最大限度维持风机、光伏阵列工作在MPPT模式,实现新能源最大出力;3)综合考虑储能电池使用寿命与实际放电量,限制其充放电深度在30%~90%之间[10]。
本文将直流微网系统运行工况分为六种。其中,并网运行工况一种,离网运行工况五种。系统运行工况判断流程图如图7所示。在并网运行工况、风光限功率运行工况、电池充电工况下由风光储三者互补供电;在气储互补运行工况、电池放电运行工况、切除负载运行工况下由风光气储四者互补供电。

图7 系统运行工况判断流程图Fig.7 System operating condition judgment flowchart
3.1 并网运行工况
并网运行工况是微网系统AC端口1在并网时的基本运行模式。并网运行工况时,由电网(AC端口1)稳定直流母线侧电压Udc恒定,提供系统负载功率缺额或吸收微网多余功率;此时微燃机(AC端口2)不工作;风机(AC端口3)与光伏(DC端口2)工作在MPPT模式,最大限度利用新能源出力;储能电池采用恒定SOC=60%控制为系统离网运行做准备;AC,DC负载端口工作在恒压恒频(V-F)与恒负载侧电压(C-udc)控制保证负荷正常供电。
3.2 离网运行工况
当微网系统离网时需要根据上文所提三个原则对各个端口控制策略进行调整。检测系统当前风、光、AC 负载、DC负载输出功率Pw,Ppv,Pac,Pdc与当前储能电池SOC。根据检测数据判断当前系统运行工况。
3.2.1 电池充电运行工况
当Pw+Ppv≥Pac+Pdc,且SOC<90%,系统工作在电池充电运行工况。此时风机与光伏端口工作在MPPT模式,两者输出功率大于交直流负载所需总功率。微燃机不工作,储能电池采用恒定直流母线电压(C-Udc)控制,并吸收风光多余能量。
3.2.2 风光限功率运行工况
当Pw+Ppv≥Pac+Pdc,且SOC≥90%时,风机与光伏两端最大输出功率大于交直流负载所需总功率。且储能电池荷电状态达到运行约束上限90%,此时需减小光伏出力,将光伏端口切换为恒功率(C-P)控制,令Ppv=Pac+Pdc-Pw。
3.2.3 气储互补运行工况
当Pw+Ppv<Pac+Pdc≤Pw+Ppv+Pmt_max时,风机与光伏两端最大输出功率小于交直流负载所需总功率,但负载所需总功率小于风光与微燃机最大功率之和。此时微燃机开始出力,其控制策略为恒定储能电池SOC控制(C-SOC)维持储能电池SOC=60%,通过风光气储互补给系统负载供电。微燃机输出最大功率为Pmt_max=65 kW。
3.2.4 电池放电运行工况
当Pw+Ppv+Pmt_max<Pac+Pdc,且SOC≥30% 时,风机、光伏与微燃机三者最大输出功率之和仍小于交直流负载所需总功率。微燃机外环输出功率达到最大限额65 kW。储能电池荷电状态较大,可在一定时间内通过储能电池补充交直流负载缺额功率。
3.2.5 切除负载运行工况
当Pw+Ppv+Pmt_max<Pac+Pdc且SOC≤30%,储能电池荷电状态达到规定下限,风光气储四者供电不足,需按照负荷等级切除负载,使得切除后Pw+Ppv+Pmt_max≥Pac+Pdc,维持重要负载持续运行。
4 仿真验证与分析
本文在Matlab/Simulink平台下搭建多能直流微网系统仿真模型。其仿真参数如下:电网额定电压(线)Usxref=380 V,直流侧额定电压Udc=800 V,直流侧电容C=4 000 μF,AC端口电阻Ra=0.1 Ω,AC端口电感La=5 m H,DC端口电阻Rd=0.1 Ω,DC端口电感Ld=2 mH,开关频率fvsc=10 kHz,电池容量=100 A·h,电池额定电压Ubattery=220 V,微燃机等效惯量延迟Tmt=0.8。
由于仿真时间尺度较长,为方便验证本文适当减小微燃机惯量特性与电池容量。
4.1 工况切换:电池充电至气储互补
电池充电切换储互补工况波形如图8所示。

图8 电池充电切换气储互补工况波形图Fig.8 Waveforms diagram of battery charging switch gas and battery complementary conditions
图8中,Pb为储能电池输出功率,Pmt为微燃机输出功率,Plack为风光与交直流负载功率缺额。0 s前系统工作在电池充电工况,因此储能SOC>60%,微燃机不工作。0 s时负载突增,导致Pw+Ppv+Pmt_max<Pac+Pdc,且SOC≥30%,系统切换为气储互补运行工况,则有:

在0~1.2 s,由于储能电池SOC>60%,微燃机仍不出力,仅由电池提供功率缺额Pb=Plack=25kW;在1.2 s时,储能电池SOC<60%;在1.2~3.1 s时,微燃机开始响应,由于微燃机大惯量特性其响应速度较慢Pmt<Plack,此时由储能提供两者差值,稳定直流母线;在3.1~10 s时,微燃机输出Pmt>Plack,微燃机在提供直流侧功率缺额Plack同时给储能电池充电直至其SOC稳定至60%。
当系统从电池充电工况切换至气储互补工况时,储能电池首先经过一个放电过程,直至电池荷电状态降低至参考值以下,此时微燃机开始启动,最终微燃机出力补偿系统功率缺额与电池释放的能量。整个切换过程系统直流母线电压有小幅度突升,系统整体可以保持稳定运行。
4.2 气储互补工况
4.2.1 负荷突增
负荷突增波形图如图9所示,0~10 s内Pw+Ppv+Pmt_max>Pac+Pdc,且SOC≥30%,系统运行在气储互补工况。

图9 负荷突增波形图Fig.9 Load sudden increase waveform
图9中,在0~2 s期间,微燃机出力Pmt=Plack,储能电池SOC=60%,系统稳定运行;在2 s时,风光与交直流负载功率缺额Plack发生突变,从25 kW升至50 kW,此时微燃机开始增加出力,但其响应速度较慢;在 2~4.1 s期间,Pmt<Plack,由储能电池提供两者差值,稳定直流母线;在4.1~10 s期间微燃机输出Pmt>Plack,微燃机提供直流侧功率缺额Plack,同时微燃机给储能电池充电至其SOC稳定至60%。
4.2.2 风光出力突增
风光出力突增波形图如图10所示。图10中,0~10 s内Pw+Ppv+Pmt_max>Pac+Pdc,且SOC≥30%,系统运行在气储互补工况。在0~2 s,系统稳定,微燃机出力提供功率缺额Pmt=Plack=25 kW,储能电池SOC=60%;2 s时,负载所需功率不变,但风光出力增加15 kW,导致功率缺额Plack从25 kW降至10 kW,此时微燃机开始减少出力。但由于其响应速度较慢,2~3.9 s期间Pmt>Plack,此时由储能提供两者差值,稳定直流母线;4~10 s微燃机输出Pmt<Plack,储能电池放电直至其SOC稳定至60%。

图10 风光出力突增波形图Fig.10 Wind and solar energy sudden increase waveform
气储互补工况下可将风光出力的增减与负载耗电量的增减都以功率缺额Plack的变化进行体现。在功率缺额突增时,其变化首先反映在直流母线电压上,从而导致直流母线电压发生突降之后储能电池根据电压变化迅速调整出力匹配功率缺额稳定直流母线电压。总体而言,无论系统功率缺额发生突增或突减,直流母线电压会发生一定波动,但其系统整体可保持稳定运行。
4.3 工况切换:气储互补至电池放电
风光出力突减波形图如图11所示。

图11 气储互补切换电池放电工况波形图Fig.11 Waveforms diagram of gas battery complementary switching to battery discharge condition
0~2 s时系统运行在气储互补工况。2 s时负载突增20 kW,风光出力不变,此时系统功率缺额Plack从50 kW突增至70 kW,此时Pw+Ppv+Pmt_max<Pac+Pdc且SOC≥30%,系统转换为电池放电工况。2~3.7 s微燃机逐渐增加出力至达到最大输出功率65 kW;3.7~10 s由于风、光、微燃机出力不足,电池以5 kW输出功率放电。
当系统功率缺额增大,超过微燃机最大出力时,系统从气储互补工况切换至电池放电工况。整个切换过程系统控制策略无需变化,系统可实现平滑切换保持稳定运行。
5 结论
本文针对含风光气储的多能互补直流微网提出了对应的运行控制策略。对直流微网内微燃机与储能电池惯量特征进行分析,提出了气储惯量互补的控制方式,最后对控制方法进行仿真验证。
通过结果分析,可得到以下结论:
1)本文所提出的气储互补策略可在不同情景下实现气储惯量高效互补,实现系统快速响应。
2)通过直流微网运行控制策略,实现离网运行工况间的稳定切换,维持直流母线电压稳定。
总的来说,本文所提策略为含风光气储的多能互补直流微网的优化运行提供有益参考。然而,多能互补直流微网在并、离网模式间切换时的直流母线电压控制问题将变得更加复杂。在稳定直流母线电压的前提下,如何延长储能电池的寿命,实现其有序、高效的充放电?这些问题均有待进一步深入研究。
