直流微电网电压电流分布式控制方法研究
2022-06-08刘胜
刘胜
(国家电网有限公司,北京 100031)
微电网是相对较小的电网,其中的负载、电源和储能系统需要仔细微调[1]。通常微电网是交流(alternating current,AC)或直流(direct current,DC)网络中的一种,其中的每种类型都需要专用的控制策略[2-3]。基于交流输配电网的丰富运行经验,目前人们已经建成适应于交流微电网的控制策略[4-5],但直流微电网的控制仍然处于探索阶段。通过DC-DC变换器可将多个电源和负载(例如光伏面板、电池、电子设备)直接连接到直流微电网,从而使直流微电网比交流微电网更具高效性,其中直流微电网的电压、电流控制至关重要。
微电网的控制主要是确保负载处的电压在所需的值附近,并且在各种电源之间公平地分配电网功率[6-11]。目前为实现这一需求,可通过设计电流共享型(按照比例分配)控制器,将负载需要的总电流按照比例分配给各种电源。通常分级控制方法可以实现这两个目标,但分级控制已经不足以应对为不断变化的负载提供快速响应的需求,因此分布式电流控制正逐渐成为研究人员关注的焦点,特别是针对电流(电源)共享的控制方法[12-13]。实际上由于网络中的电流与电压紧密相关,因此无法自由调节电压,但仍期望适当分配电源产生的电流,为了实现这一目的,通常放宽电压控制要求,仅要求将整个微电网上的平均电压调节到全局电压的设定值即可。本文也采用相同的方法,即“平均电压调节法”、“全局电压调节法”或称为“电压平衡法”[14-15]。
可见,尽管直流微电网的分布式控制方案的设计和分析已引起了大量关注,但仍然缺乏可同时实现电压调节和电流(功率)共享的控制方法。为此本文从直流微电网拓补结构出发,提出了一套直流微电网的电压、电流控制模型,设计了一套分布式控制方案,仅需测量电源提供的电流,以及通过通信网络交换分布式发电单元(distributed generation unit,DGU)的电流测量值,即可实现平均电压调节。本文从理论分析出发推导和分析了算法的稳定性,最后通过仿真实验验证了本文提出的微电网控制方法的有效性。研究结果可为直流微电网的电压、电流控制提供参考。
1 直流微电网模型
1.1 微电网系统系统模型
本文的研究对象是一个典型的直流微电网系统,该微电网由n个DGU组成,这些DGU通过m个阻性(RL)电力线相互连接,如图1所示。
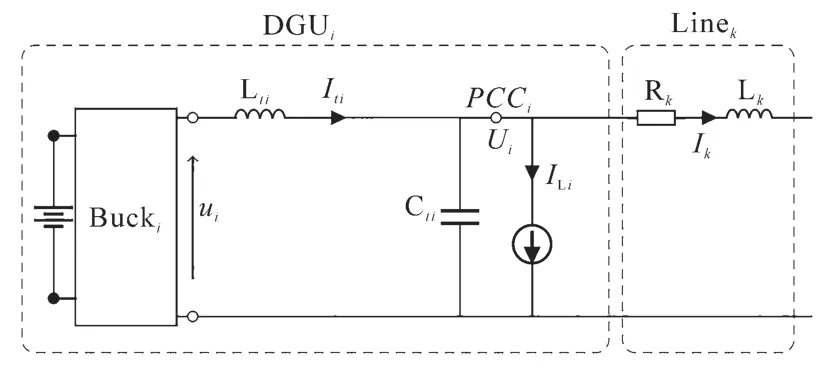
图1 DGU系统示意图Fig.1 Schematic diagram of DGU system
图1中各个字符的意义如表1所示。

表1 DGU变量统计表Tab.1 Statistical table of DGU variables
DGU中的电源由直流电压源表示,该直流电压源通过DC-DC降压变压器为本地负载供电。本地直流负载连接到所谓的公共耦合点(point of common coupling,PCC),假设电流需求ILi无法测量。描述DGU的动态行为的方程为
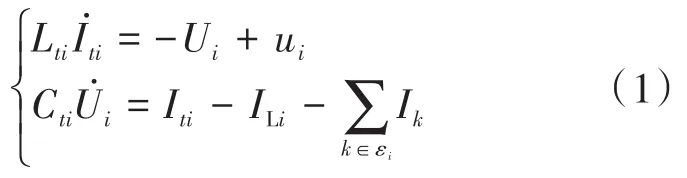
式中:εi为入射到DGUi的一组电源线;控制输入ui为降压变压器的输出电压。
从DGUi到DGUj的电流由Ik表示,其动态由下式给出:

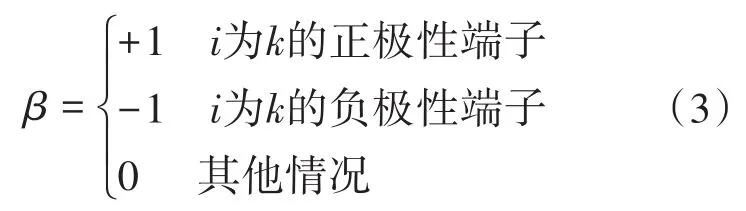
式(1)、式(2)中的各个变量与参数的意义如表1所示。整个直流网络通过互联无向图ξ=(υ,ε)表示。其中υ={1,2,…,n},表示DGUS图中的边界线;ε={1,2,…,m},表示DGUS图中的电力线。网络的拓扑结构通过关联矩阵β进行描述,其中β∈Rn×m,边k的末端任意用a+和a-标记,β的项由下式给出:
因此可以将整个微电网的数学模型写成:
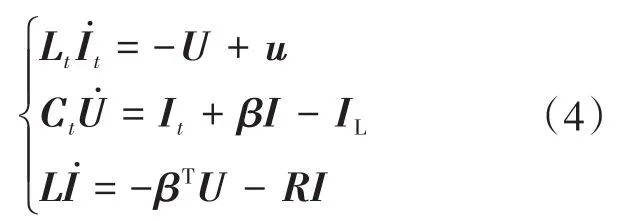
式中:It,U,IL,u∈Rn;I∈Rm;Ct,Lt∈Rn×n,R,L∈Rm×m,均为正定对角矩阵,例如:Ct=diag(Ct1,Ct2,...,Ctn)。
1.2 电流、电压控制模型
本文制定了直流微电网中的两个常见控制目标。首先对于给定的需求IL和常数输入,系统的稳态解满足:
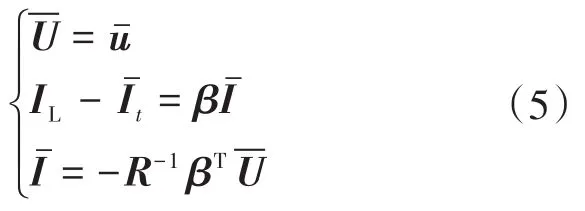
式(5)表示电力需求的平衡状态,即总发电量与总电力需求量相等。为了避免电源应力过大并提高发电效率,通常需要网络在所有各个DGU中按其相应能源的发电量成比例地共享(按比例分配电流)。对于所有i,j,该期望可以被公式化为其 中wi为 相 对 较 大 的 值 ,将 对 应 于DGU的相对较小的发电容量,由此可导出与发出的电流It的稳态值有关的第一个控制目标,即控制目标1(按比例分配电流):

其中,对于所有i∈υ以及,有W=diag(w1,…,wn),wi>0。对于电流平衡状态,必然有在引入第二个控制目标之前,假设对于每个DGU,都存在一个参考电压,即对于所有i∈υ,存在参考电压(假设1)。

1.3 微电网分布式控制模型
在提出实现1.2节中讨论的目标的分布式控制函数之前,对可测量变量进行以下假设(假设2):假设在变压器i∈υ处,发电产生的电流Iti是可测量的。此时既不需要测量电压U,也不需要系统参数的信息。现在,我们以临时方式提出一种可能的控制方案,并在本节后面提供其原理。为此,考虑以下形式的节点i∈υ处的分布式控制器:
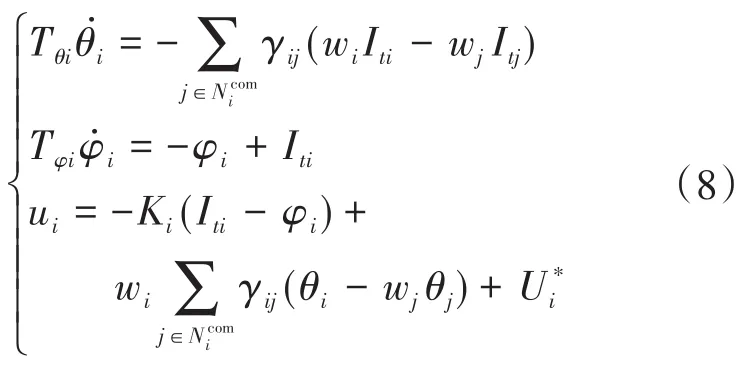
其中,参数Tθi,Tφi,Ki∈R>0,允许对瞬态响应进行适当的调谐。
数据集Nicom是通过节点i相连的通信网络,网络连线权重为γij=γji∈R>0,由此实现了控制器的分布式布置,因为它规定了在相邻节点It和θ之间交换信息,与微电网的拓扑结构类似,整个通信网络由连通无向图表示为ξcom=(υcom,εcom),其中υcom=υ,εcom={1,…,mc},代表了DGU之间的通信连接,mc为通信网络中的节点数,通信网络拓扑由其对应的关联矩阵βcom进行描述,其中βcom∈Rcom,之后对于所有的i∈υ,控制方程可写为
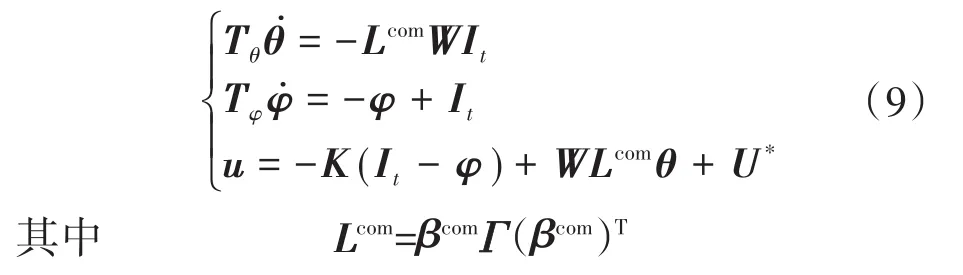
式中:Tθ,Tφ,K∈Rn×n,为正定对角矩阵;Lcom为与通信网络关联的(加权)拉普拉斯矩阵;Γ∈Rm×m,为正定对角矩阵边缘上的权重。
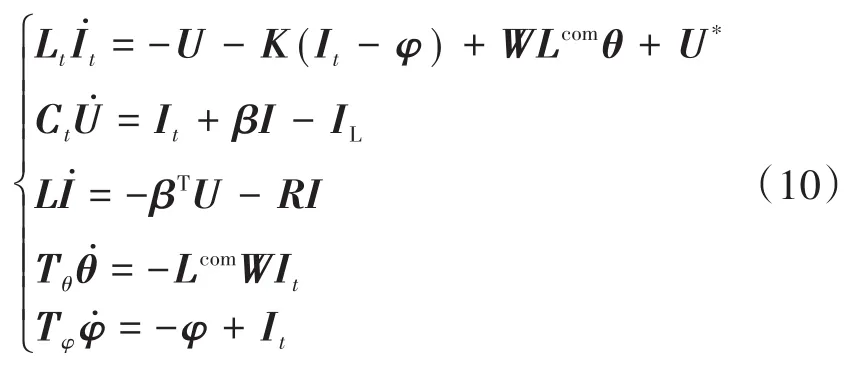
连接式(4)所示的微电网与式(9)所示的分布式控制器,得出整个闭环系统:
首先需要证明方程组(10)的稳态解总是存在的,即在假设1和假设2同时满足的条件下,对于方程组(10)存在一组稳态解,满足:


由式(11)可得:

将式(12)代入式(11)可得:

如果微电网ξ的结构是树状(例如m=n-1),那么拉普拉斯矩阵βTβ的逆存在,并且解Iˉ:

当微电网ξ不是树状结构时,即m>n时,β可以重写为β=[βt,βr],其中βt∈Rn×(n-1),是网络ξ的生成树的最小关联矩阵,此时式(15)可以重写为
因此对于任何处于连接状态的图ξ,都存在有对应的解。将式(11)的两侧乘以W可得W-TU=W-TU*。与式(11)类似,可得:
由于矩阵Z是列满秩,因此广义逆矩阵Zg以左逆的形式出现在公式中,如下式所示:

由式(13),式(11)可改写为

可得:
式中:β∈R。
在给定电流值IL的条件下,对于变量可根据式(12)、式(13)、式(15)、式(16)、式(18)、式(21)求得。下一节中本文将重点讨论所提出的控制方案和控制微电网时的指数稳定性。
2 结果与分析
2.1 算法稳定性分析
本节重点讨论式(10)得到的解能否收敛至稳定状态,实现电流分配(目标1)和平均电压调节(目标2)。即需要证明保持假设1和假设2成立的条件下,方程组(10)的解能够以指数形式收敛,实现电流分配(目标1)和电压平衡(目标2)。证明考虑发电量递增的情况:
作为中间结果,可以得出式(10)所示系统的所有解都是有界的。根据LaSalle不变性原理,对式(10)的解逼近完全包含在集合中的最大不变集在这个集合上I是一个常数,例如此外在集合γ上,方程组(10)还满足:
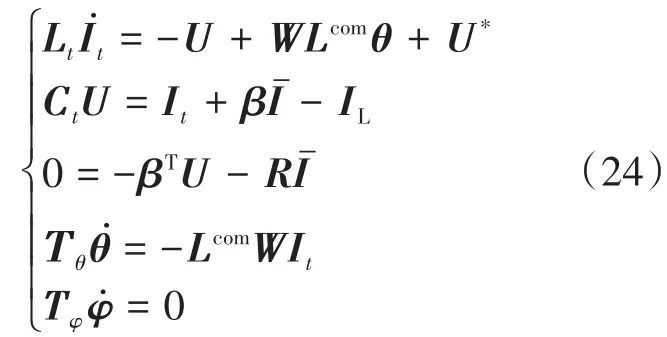
由式(24)可知,在最大不变集上φ是常数,即由于在集合γ中,It=φ,所以在最大不变集上,It也是常数,即。因此式(24)的右手边是一个常数向量,当时,θ会变得无界,与方程组(10)建立的解有界性相矛盾。因此在最大不变集上θ是常数,即可知实现了电流分配(目标1)。通过在式(24)两边乘以W-T,并 且 在 最 大 不 变 集 上 有可 导 出W-TU=W-TU*,结合式(24),可得:
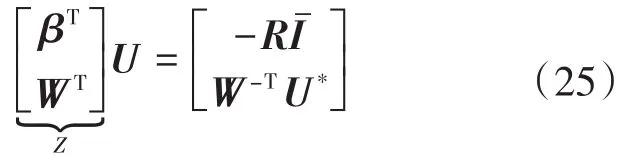
由于式(25)中矩阵Z列满秩,因此在最大不变集上有:

2.2 微电网仿真实验
为了验证本文提出的分布式一致性算法的有效性,考虑由4个DGU组成的微电网,如图2所示。

图2 4个DUG直流微电网示意图Fig.2 Schematic diagram of four-DUG DC micro-grid
图2中的虚线是通信网络,DGU元件和线路的参数取文献[11]中表Ⅱ和Ⅲ的参数,图中通信网络的连线的权重为γ12=γ23=γ34=1×102。系统处于稳定状态时有电流初始值IL(0)=[30,15,30,26]TA,系统由于存在电流需求,引起的电流变化量为 ΔIL=[10,7,-10,5]TA,持续时间为 1 s。利用本文提出的模型计算得到的电压和电流如图3所示。
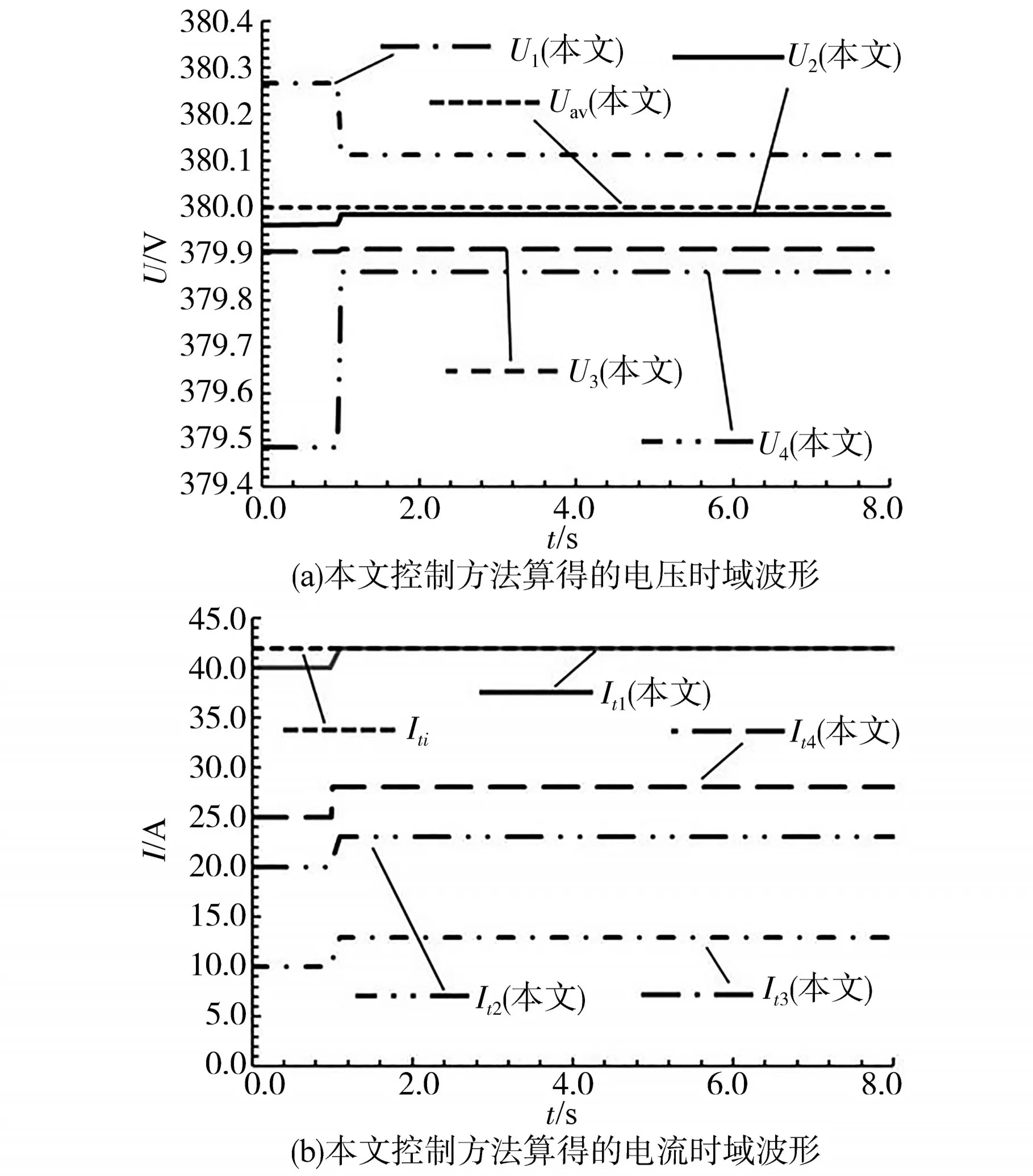
图3 本文提出的电压电流计算结果Fig.3 Calculation results of voltage and current presented in the paper
由图3可以看出,通过本文设计的控制器进行电压调整,可将电压的稳态加权平均值(Uav),调整至相应的电压参考值的加权平均值(见目标2),并且每个DGU产生的电流最终都收敛到了期望值,从而实现电流的分配和共享(见目标1)。
为了便于与本文提出的模型进行比较,图4为现有文献[11]的控制方法得到的电压、电流时域波形。
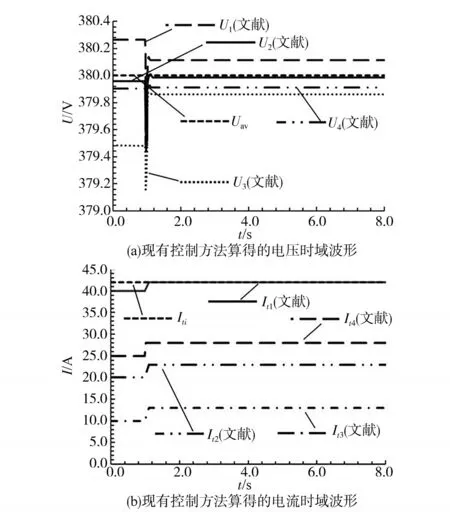
图4 文献[11]提出的电压电流计算结果Fig.4 Calculation results of voltage and current proposed in reference[11]
图4为通过滑模(sliding mode,SM)控制器所得的结果[11]。由图4中所示的U3的电压随时间的变化的典型波形(所有其他DGU都存在类似的行为),可见电压响应本身具有瞬态高频振荡的特征。由图4还可以看出,SM控制器产生的电流时域波形与本文得出的结果相似(见图3),并且都能够收敛至期望值,但电压出现了高频振荡,而采用本文提出的模型时,电压瞬态特性得到了明显改善(见图3)。这是因为本文提出的电压、电流控制器不需要测量电压值,而现有的SM控制器不仅需要测量电压,还需要计算电压的一阶和二阶导数,对于电压存在测量噪声的情况,很可能导致算法鲁棒性问题。
图5为本文提出的控制方法与现有方法在电压发生扰动的瞬间进行电压调控的时域波形对比。
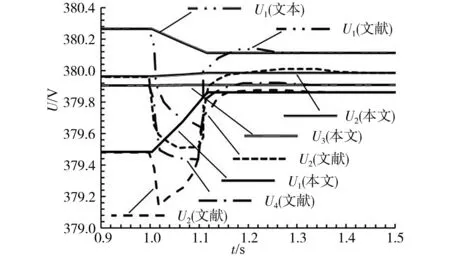
图5 瞬态时域响应寅比Fig.5 Comparison of transient time domain response
由图5可见,现有方法进行电压调整时,各个节点都将产生一定电压过冲,这是由图4所示的电压瞬态振荡引起的。采用本文提出的电压控制方法可以有效避免电压瞬态振荡问题,同时用较短的时间将电压调整至期望值。
表2为电压需求发生变化后,调整至期望电压所需的时间统计表。
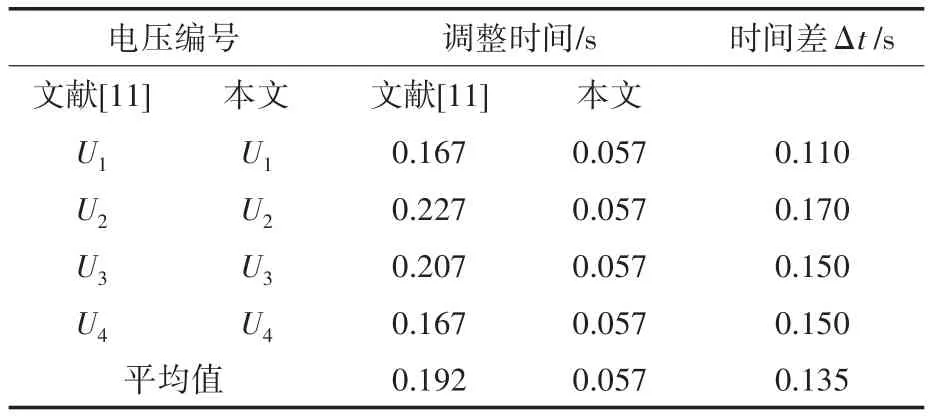
表2 电压调整时间统计表Tab.2 Statistical table of voltage adjustment time
由表2统计结果可知,现有调整方法对各个节点进行电压调整时,各个节点所需的调整时间不同。相比现有控制方法,本文提出的电压控制方法可以实现各个节点电压的同步调整,同时调整速度比现有方法平均要快0.135 s。
3 结论
针对直流微电网的电压、电流控制问题,提出了一种在电流负载未知的直流微电网中,能够实现按照比例均流和平均电压调节的分布式控制方法,得到以下几个主要结论:
1)本文提出的控制方法只需要测量微电网产生的电流,而不需要知道微电网的参数,提高了电网控制效率,减少了电信号噪声对微电网控制的影响。
2)利用本文提出的方法,电压、电流控制方程的解可以从全局收敛到期望的稳定状态,解的收敛性独立于物理系统的初始条件和控制器状态,表明本文提出的方法可以适用于各种工况。
3)与现有直流微电网电压、电流控制方法的对比结果表明,本文提出的方法可以有效改善电压瞬态特性,提高算法鲁棒性。仿真结果表明本文提出的电压控制方法可以实现各个节点电压的同步调整,同时调整速度比现有方法平均要快0.135 s。
