导弹舱段对接姿态偏差测量方法研究*
2022-06-08晋严尊刘赛华
汤 辉,晋严尊,刘赛华
(中国空空导弹研究院,洛阳 471009)
0 引言
雷达系列空空导弹是由多个舱段组成,具有尺寸小、质量大、对接面特征复杂等特点。目前对接模式是人工将待对接的两个舱段放置到对接台的托架上,手动调节托架位置,使相邻两个舱段的轴线对准、对接面上的定位销及定位槽精准配合[1]。因各舱段重量较大、舱段间配合公差高要求等因素,依靠人工将各舱段间的同轴度偏差和圆周方向上定位销与定位槽的对准偏差调整到要求范围内,存在效率低、精度和质量难以保证等问题。实现对接工序的自动化、智能化是保证装调质量和安全性的前提下实现产能提升的一个重要途径。
对于自动化舱段对接系统来说,舱段在对接过程中的位置是随机的,执行元件通过“平移”和“旋转”动作以便将舱段的位置和姿态调整到位。但执行元件并不能知道需要移动多少距离或者旋转多少角度,需要有相应的测量系统反馈至控制系统,由控制系统将移动量传达至执行元件。因此,测量系统的性能将直接决定位姿调整的精度和效率。
轴线姿态的测量技术可分为两大类,接触测量与非接触测量。接触性测量包括三坐标测量机、关节式测量臂等。三坐标测量机具有自动测量、技术成熟、价格低廉等特点。关节式测量臂则需要人力移动测头测量,虽体积小但不满足自动化装配,存在测量误差,可能造成设备表面损伤。非接触测量包括激光跟踪仪+靶标[2]、机器视觉+靶标[3]和线结构光等手段[4]。激光跟踪仪具有精度高、相干性好、抗干扰能力较强等优点,但不能对特征量进行直接测量,且价格昂贵。机器视觉方法需进行三维姿态测量,配置3D相机,价格昂贵。线结构光测量需要对筒件无接触测量,无靶标,精度高,但有局限性。
相较于其它测量手段,三坐标测量机[5]在技术上成熟且价格低廉、精度高,因此本文选择三坐标测量机作为舱段轴线偏差的测量手段。由于定位销与定位槽的角度偏差测量可以在二维平面内进行,因此采用单目工业相机视觉实现角度偏差的测量。基于三坐标测量机和视觉系统,本文研究了融合位姿检测和对接面关键特征识别与定位的测量方法,并应用于导弹舱段自动对接系统,实现导弹舱段高质高效对接。
1 对接系统及对接工艺选择
1.1 对接系统设计
自动化对接系统主要完成导弹导引舱、飞行控制舱、过渡段和舵机舱的连接,如图1所示。
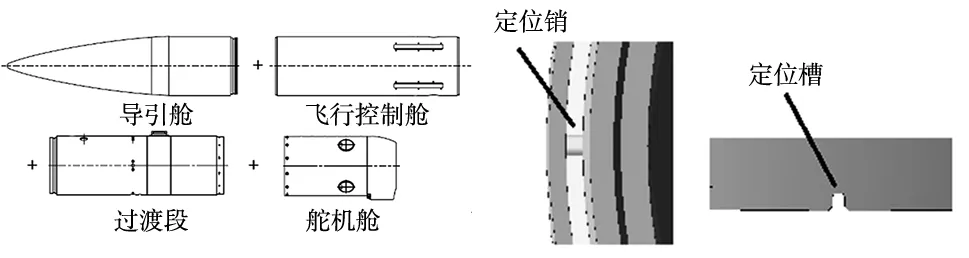
图1 导弹组成 图2 舱段间周向定位销、定位槽
各舱段间轴线方向上为轴孔间隙配合,并用楔块和螺钉进行紧固,圆周方向通过定位销与定位槽完成限位,如图2所示。
自动对接系统主要由3个6自由度并联平台(也称steward平台)、1个固定平台、工业相机(机器视觉)、三坐标测量机组成,组成如图3所示。
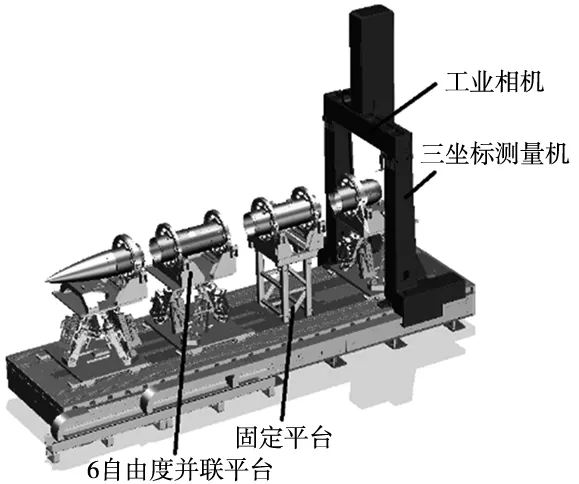
图3 自动对接系统组成图
各舱段在对接平台上固定后,通过三坐标测量机检测各个舱段的轴线位置,通过工业相机扫描各舱段定位销和定位槽的空间位置,并将信息传至控制系统。通过计算发出指令驱动6自由度并联平台带动各舱段做相对位置调整,最终达到各舱段的同轴度对准及圆周方向定位销和定位槽对准。调整完成后,活动舱段在驱动装置作用下沿对接平台导轨继续运动,直至完成各舱段对接。
1.2 对接过程测量工艺分析
对接过程中,以某一舱段作为基准舱段,依次完成相邻舱段的轴线偏差的测量及调整、舱段间圆周方向定位销与定位槽的测量及对准。对接系统工作时,舱段位置和姿态调整执行机构依据测量系统所测得的各舱段实时位置和姿态信息,对舱段进行调整,最终实现精准对接。需解决两个关键问题:
(1)舱段间轴线识别与调整。各舱段对接前,需对各舱段轴线(同轴度)偏差进行调整。在对接台上,将某一舱段固定,以其轴线作为基准对其它活动舱段轴线进行调整,识别出活动舱段轴线与固定舱段轴线的偏差,再由对接台带动活动舱段做俯仰、偏航方向位姿调整,直至各舱段轴线重合,对接后要求同轴度偏差≤0.05 mm。因无有效的测量手段,肉眼较难准确识别出各舱段间的同轴度偏差,偏差较大时需分开重新对接,因此需要反复识别和调整,对接时间长、效率低。
(2)对接面关键特征(定位销与定位槽)定位。导弹舱段对接工作除需要各舱段位姿(轴线)调整外,还需通过定位销与定位槽完成圆周方向位置的对准。由于部分定位销为暗销,且定位槽的尺寸小,对准偏差要求高(≤0.02°),同样需要人工辅助定位。为保证对接精度,必须采取有效的测量方法,提前测量出舱段轴线偏差以及定位销和定位槽的位置,才能实现安全可靠对接。
2 舱段间轴线识别与测量
本系统采用的三坐标测量机位于对接系统的支撑平台上,同时在测量机上搭载了雷尼绍OMP40超小型测头组件和工业视觉相机。
三坐标测量机带动测头在垂直导弹轴线的剖切面上进行测量,提取导弹端面上多个点的三维坐标值(至少4个点,如图4所示)以及用于舱段前后圆心计算的点的坐标值(一个圆心由4个点拟合得到),即一个舱段要测量12个点坐标,从而计算出弹体舱段的坐标系。
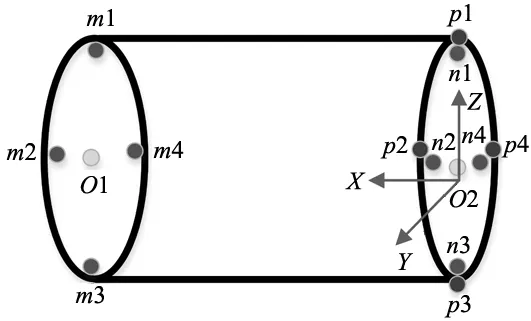
图4 舱段坐标系的建立
首先测量前端面内壁上4个点坐标m1、m2、m3、m4,通过拟合算法计算出圆心坐标O1,然后测量后端面内壁上的4个坐标点值n1、n2、n3、n4,通过拟合算法计算出圆形坐标O2,后端面的上的4个点p1、p2、p3、p4,通过p1、p2、p3、p4拟合出平面,通过点O1、O2和平面p1、p2、p3、p4计算出该舱段的坐标系M1。
圆心拟合计算如下:
多点所在的平面方程表示为:
ax+by+cz-1=0
矩阵形式:
MA=L1

根据最小二乘法[6]计算出:
A=(MTM)-1MTL1
由于点都在圆上,任意两点连线的中垂线必过圆心。取圆上两点P1=(x1,y1,z1)与P2=(x2,y2,z2),假设圆心为P0=(x0,y0,z0),记Δx12=x2-x1,Δy12=y2-y1,Δz12=z2-z1。
所有的点在圆上,则
记
则
BTBC=BTL2
可得:
A=(MTM)-1MTL1
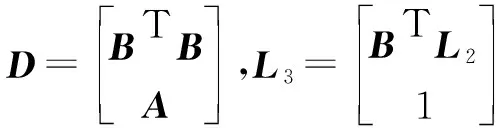
则圆心坐标:
C=(DTD)-1DTL3
将多点三维坐标值作为导弹的测量输入参数,前后圆上的点分别拟合出前后圆心,然后通过后端面上4个点拟合出平面,通过两个圆心和一个平面计算出弹体舱段的位姿。假设将导弹分成4段进行对接,则需要在每一个舱段前后两个剖面上进行测量并计算出活动舱段相对于固定舱段的位置关系。每个舱段需要测量的点数是12个点,那么要完成整个弹体的测量就需要测量48个点。
当固定舱段的测量计算完成后,则开始测量下一段的12个点并计算出此舱段的坐标,通过拟合可以得到活动舱段坐标系在固定舱段坐标系的位姿(x,y,z,c,b,a)。如图5~图7所示。

图5 初始阶段

图6 计算舱段之间的位姿关系
位姿关系表达式:

3 定位销和定位槽角度偏差测量
通过搭载在三坐标测量机上的工业相机(机器视觉)系统测量定位销和定位槽的角度偏差,旋转舱段保证定位销和定位槽位置一致。定位槽外漏于弹体外表面,通过视觉系统可直接识别。定位销位于弹体内部并且弹体表面部分也容易被漆层覆盖,不便于视觉系统直接识别,因此采用视觉辅助块将定位销的位置引出。
高分辨率相机采集视觉辅助块上定位销及定位槽的图像后,经过halcon软件[7]的图像处理和模板匹配准确计算出定位销和定位槽的位置,通过算法计算出两者的角度偏差,从而控制平台旋转,保证对接端面的定位销和定位槽精准固定。视觉系统识别控制角度偏差流程如图8所示。
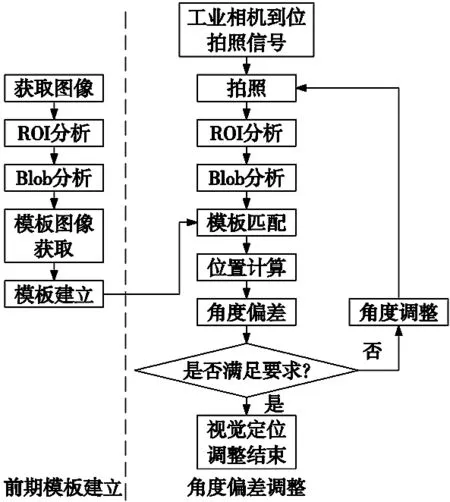
图8 图像处理流程
在图像进行特征点识别时,由于外界光线的变化会导致识别率降低,为克服这个难题,采用归一化相关系数法的模板匹配[8-9]。

采用归一化相关系数匹配的优点如下:
(1)适合光照线性变化的情况;
(2)适合物体轻微变形的情况;
(3)适合边缘不清的、有纹理的或模糊的图像。
图像匹配过程中使用金字塔分层搜索策略[10-11],如图9所示。搜索过程由高层到底层拓展,将高层图像搜索到的模板实例追踪到图像金字塔最底层,这个过程中需要将匹配结果从高层映射到金字塔下一层,也就是直接将找到的坐标乘以2。考虑到匹配位置存在不确定性,将下一层搜索定位匹配结果的周围的区域定义为搜索区域,然后在该区域进行匹配。一般情况下,金字塔层数太高,可能导致搜索不到目标,金字塔层数太低,又会耗费大量时间,所以需要根据实际情况会合理选用金字塔层数。

图9 图像金字塔
4 实验结果及分析
4.1 舱段间轴线识别与测量实验
在6自由度并联平台上放置目标靶镜,用激光跟踪仪测量各舱段所在平台运动的定位精度以及重复精度,测量结果如表1所示。由数据可知,各舱段所在平台的调整精度均在0.03 mm以内,符合对接系统调整精度小于0.05 mm的要求。

表1 并联平台的定位与重复精度 (mm)
4.2 定位销和定位槽角度偏差测量实验
对3发导弹进行重复对接实验,每发导弹需要完成4个舱段即3个对接面的装配。
各舱段完成轴线调整后,系统进行各舱段对接面上的定位销、定位槽对准偏差测量及调整,如图10和图11所示。

图10 定位销、槽位置调整前

图11 定位销、槽位置调整后
对准偏差结果如表2所示
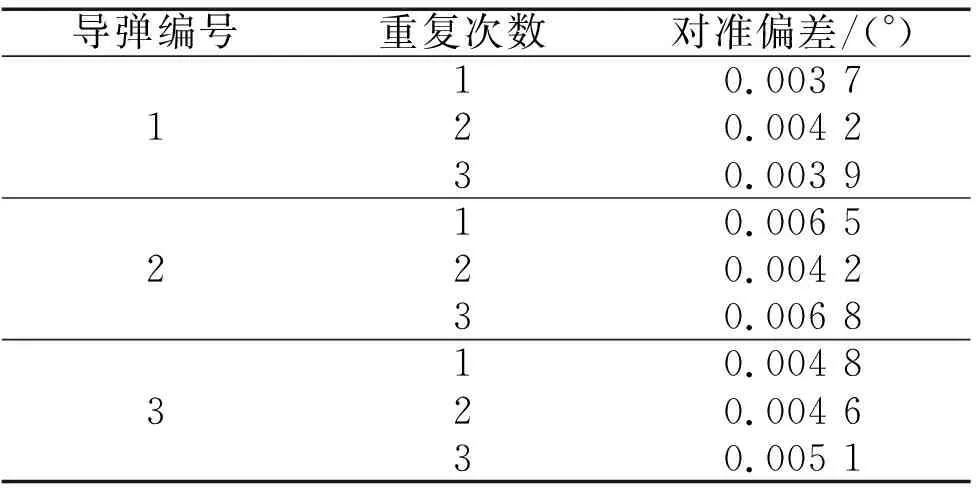
表2 定位销、定位槽的对准偏差
由表2数据可知,3发导弹舱段间定位销、定位槽对准偏差均在0.01°以内,符合对准偏差小于0.02°的对准要求。
5 结论
本文基于导弹舱段自动对接系统,对导弹舱段对接过程中装配对象识别及精确测量、位姿调整、末端执行机构精准执行等关键工艺过程进行分析,主要解决对接过程中的舱段间轴线识别与测量,定位销与定位槽角度偏差识别问题。基于三坐标测量方法实现舱段间轴线识别,采用视觉测量方法实现定位销与定位槽的角度偏差测量,最终通过反馈实现精准对接,结果表明,偏差测量精度能够满足实际生产对接要求。
