基于五杆支链性能优化和配置的并联机器人设计方法研究
2022-05-30徐怀安林松江竞宇
徐怀安,林松,江竞宇
基于五杆支链性能优化和配置的并联机器人设计方法研究
徐怀安,林松*,江竞宇
(同济大学 机械与能源工程学院,上海 201804)
随着运动任务要求的多样化和复杂化,传统并联机器人设计方法的不透明性和动平台的不变性,导致设计结果会出现偏差且柔性化程度较低。因此提出一种基于五杆支链性能优化和配置的并联机器人设计方法。首先利用解析和几何法结合,完成五杆机构运动分析和奇异性分析,根据相关性能评价指标完成支链五杆的尺度综合。之后,提出平面几何投影法将要求工作空间投影到支链五杆的最佳工作区,综合考虑工作空间及运动性能的需求,实现了并联机器人的设计和配置,提高了设计透明度。
并联机器人;支链五杆机构;尺度综合;工作空间投影
并联机器人是由若干个运动支链连接动平台和定平台组成的,一般具有两个或两个以上的自由度[1],如Stewart平台[2]、Delta机器人[3]、H4机器人[4]等。随着应用和研究的不断深入,并联机器人也出现了诸多问题。在支链设计方面,现有并联机器人多采用若干相同的开链结构,导致支链运动性能和力学性能较差,因此在支链机构中引入闭环结构成为提高并联机器人性能的主要方法。刘辛军等[5]分析了3-PUU并联机构在某些位形会出现动平台自由度增加的状况,采用四杆闭环子链代替UU运动副,实现了机构运动传递的有效性。Gosselin[6]利用三条含平面五杆机构的支链设计了一种并联机器人,实现了六自由度的调整。叶伟[7]将闭环五杆机构作为并联机构的子链,实现了不同的可重构运动方案。可见,五杆机构已经作为支链应用到并联机器人设计中,但目前对于五杆机构作为独立支链的运动性能研究系统性不足,缺乏对五杆机构最佳工作区的研究分析。
在工作空间分析上,常用的方法有几何法和解析法[1]两大类。Arrouk等[9]利用CAD几何软件求解平面并联机器人的工作空间,避免了复杂的数值计算过程。李旭等[10]基于蒙特卡洛离散的方法求解了3T1R并联机构的工作空间。但以上方法都是基于确定的并联机器人构型分析工作空间的大小,缺少针对目标工作空间需求完成并联机器人尺度综合的正向设计方法,导致设计结果不透明,甚至出现设计结果不满足要求的情况。
针对以上问题,本文通过建立平面五杆机构的运动学模型,基于奇异性分析和性能评价指标,完成对支链五杆机构的尺度综合,实现性能最优的支链五杆设计。基于工作空间需求进行并联机器人的正向设计,提出平面几何投影法将三维工作空间转换到平面五杆支链的最佳工作区,计算支链尺度是否满足工作空间要求,并明确支链的配置范围,设计出具有可变动平台的并联机器人。
1 面向性能最优的支链五杆设计
1.1 运动学模型
五杆机构如图1所示,建立坐标系,5为机架杆,1和4为输入杆,2和6为输出杆,3为连杆,其中2=,6=,l为虚拟杆。点为6末端参考点,1~5分别为杆件1~5与轴正方向的逆时针夹角,其中5=0。
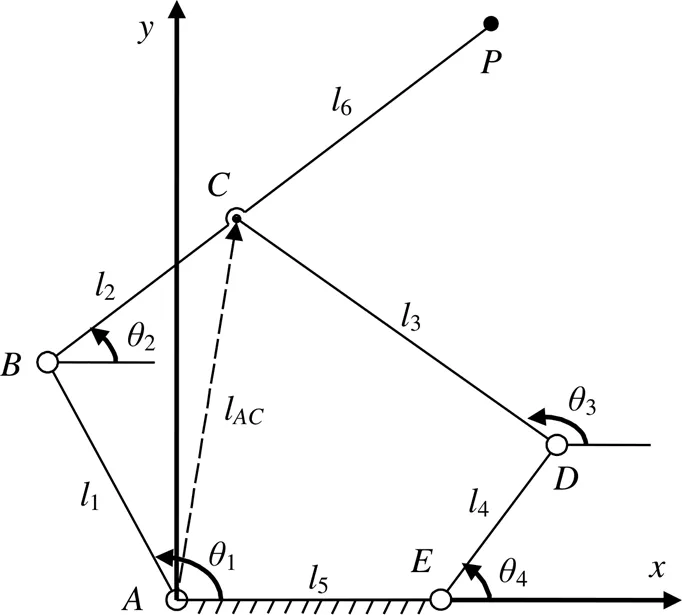
图1 五杆机构示意图
对于五杆机构运动学求解,由闭环矢量法建立关于点的投影方程为:

由式(1)可得:

则点位置为:

1.2 奇异性分析
机构奇异性是指当机构达到奇异位置时,导致末端无法驱动或处于运动不确定的状态。机构的奇异性判断一般是基于雅克比矩阵确定,对式(1)求时间导数可得:
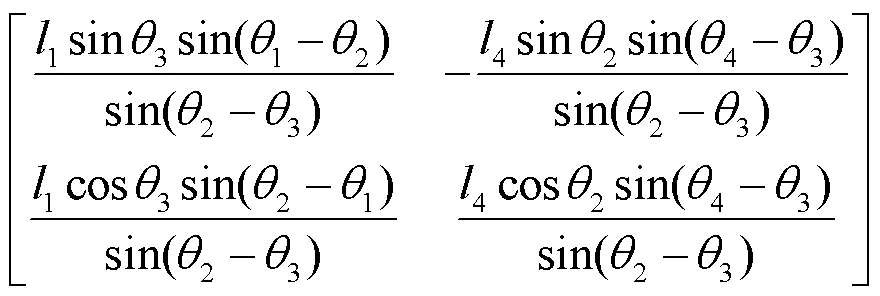
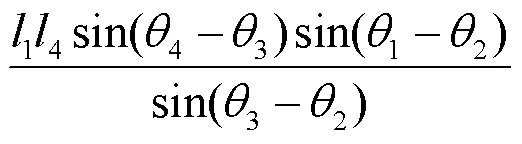
式中:为雅克比矩阵;det()为的行列式值。
式(5)表明雅克比矩阵行列式值是关于各角度参数的函数。取=-1,0,1,则针对图1五杆机构会出现两种情况:
(1)当1=2+π或4=3+π时,det()=0,此时只有当1和4的驱动速度无穷大才能在末端输出有限的速度,机构末端达到工作空间的边界,称为边界奇异;
与此同时,积极融入云南“一核一圈两廊三带六群”的区域发展,推进物流基地规划和配套建设,有效发挥铁路物流基地的集聚效应和辐射带动作用,服务区域经济发展和产业转型升级。
(2)当2=3+π时,det()=∞,此时机构关节运动状态不确定,机构末端在工作空间内部,称为内部奇异。
1.3 平面五杆机构的性能评价指标

考虑到全局运动传递性能,文献[12]提出:
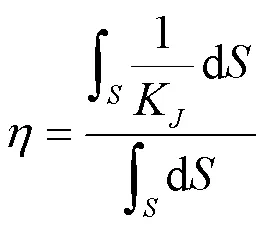
考虑机构运动过程中会出现变形,根据求出刚度矩阵=(T)-1,得到:

此时定义:
式中:为全域刚度性能平均水平指标。
在机构设计中,提高安装空间利用率是实现经济性的重要指标,因此针对图1机构定义:
1.4 基于APSO算法的尺度综合
在设计时,需要根据最优的综合性能评价指标进行机构尺度优化,选择自适应粒子群优化(Adaptive Particle Swarm Optimization,APSO)算法。APSO算法引入了自适应权重因子,能够增强粒子群算法的全局搜索能力,避免陷入局部最优[13]。
为了实现五杆支链的模块化设计,对图1机构尺寸进行归一化处理,使得5=1、6=5、1=3、2=4。根据设计要求[14]和性能评价指标,建立目标函数:
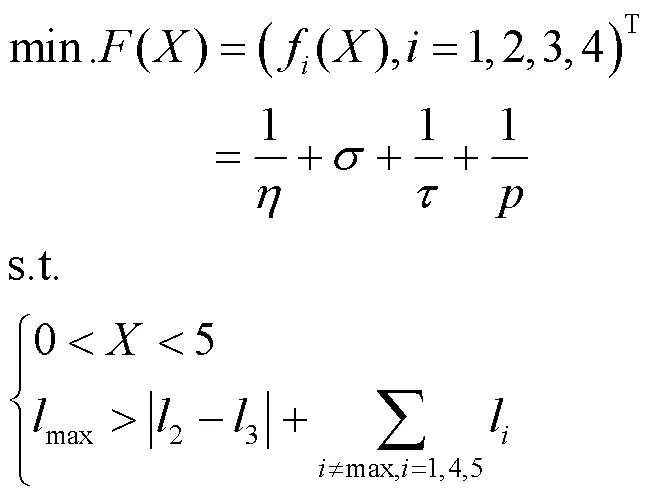
将该目标函数模型利用APSO算法实现,迭代100次,得到最优结果如图2所示,可以看出,指标、、、都得到了优化。经过20代之后,设计变量和目标函数值趋于稳定,寻到最优结果,即=(3.61, 1.47)。
2 面向工作空间的并联机器人设计
基于对五杆机构的性能优化,可以配置若干对称或非对称的支链构成并联机器人,并联机器人的工作空间就是支链工作空间的交集。但由于并联机器人正向尺度设计方法的缺少,需要建立一种基于工作空间需求进行含可变动平台的并联机器人设计方法,在设计并联机器人之初就考虑所需工作空间的要求。
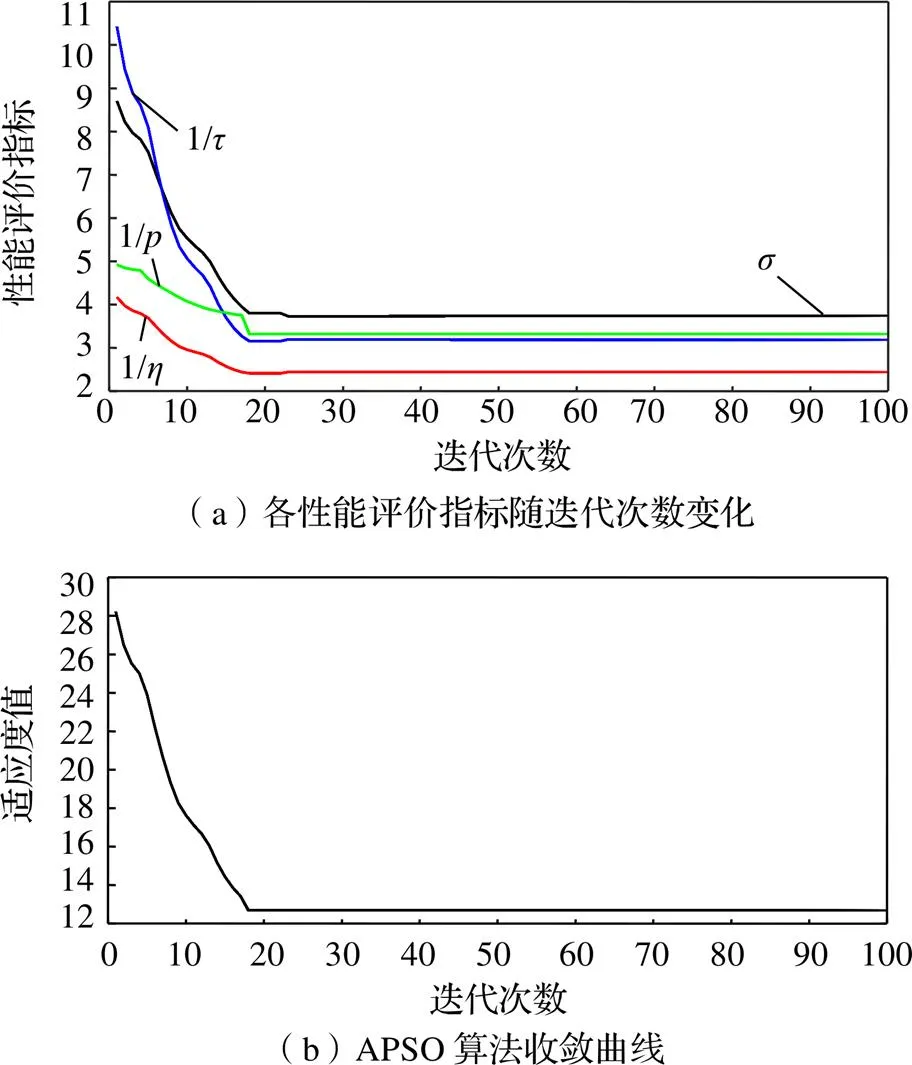
图2 五杆尺寸比例优化结果
2.1 支链五杆机构的工作空间
假设所需工作空间0为200 mm×200 mm×200 mm,首先分析五杆支链的工作空间,根据0大小和尺度综合的结果,选择五杆尺寸1=3=361 mm、2=4=147 mm、5=100 mm、6=500 mm,建立图3(a)所示的坐标系和五杆机构。根据并联机器人结构要求,选择1和4的输入范围为[π, 2π],步长都为1°,采用均匀离散的方法遍历1和4的取值范围,保证避免并远离奇异位置,得到五杆机构非奇异工作空间。根据运动性能评价指标,在非奇异工作空间内计算所有点的目标函数,确定支链五杆最佳工作区,即图3(b)白色线条包络区域。
2.2 基于平面投影的工作空间分析
针对由五杆支链组成的并联机器人,提出一种基于平面投影的工作空间分析方法,该并联机器人如图4所示。
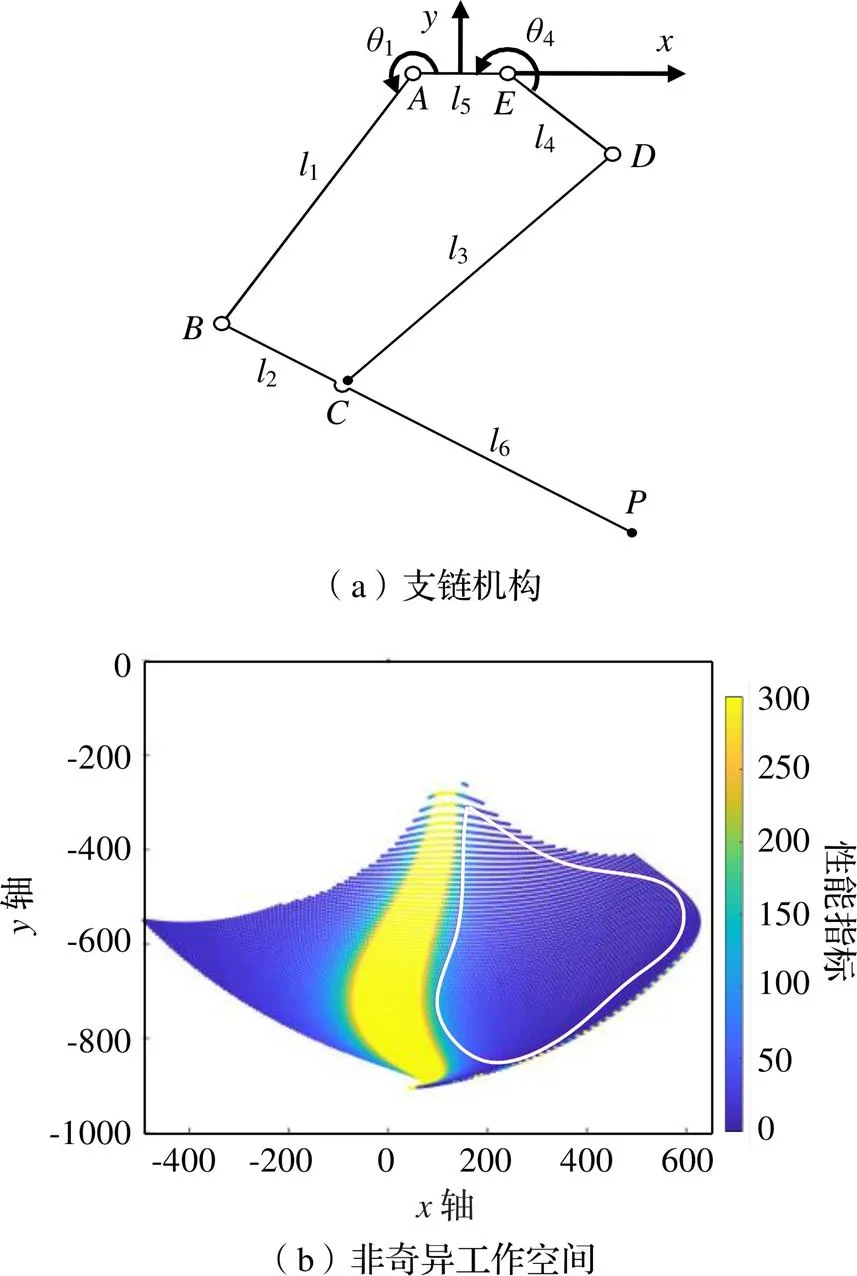
图3 支链五杆机构及其工作空间
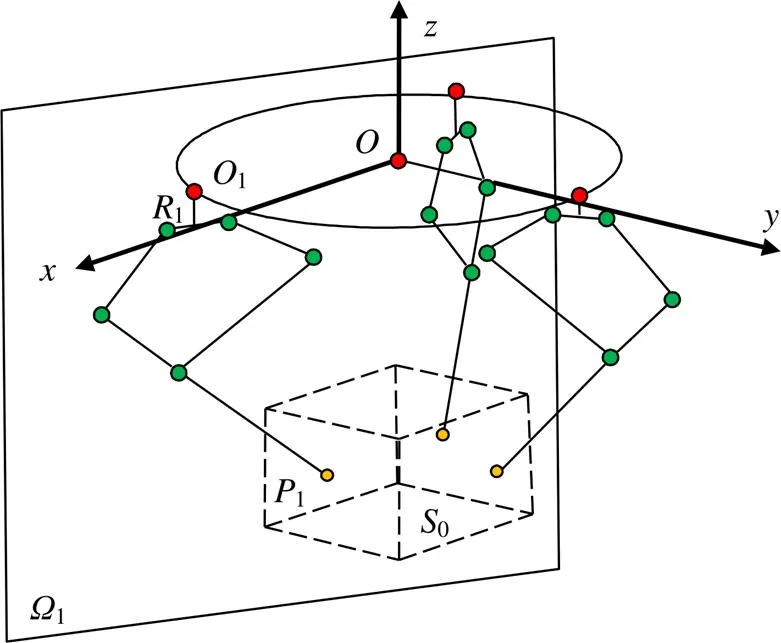
图4 可重构并联机器人结构模型
矩形体为所要求工作空间0,动平台位于工作空间内,各支链在未抓取动平台之前相互独立,支链11为2.1节所选择的五杆机构,与静平台通过转动副1连接,1轴线和静平台垂直,1为支链11所在平面。该结构中,支链可以绕转动副旋转一周形成三维空间,并联机器人的工作空间便是支链三维空间的交集。平面几何投影方法即根据不同任务的工作空间要求,通过工作空间极限位置的平面投影,以支链五杆机构的最佳工作区域确定尺度是否满足需求,并明确支链机架安装范围。
如图5所示,将整个机构在平面上投影,为并联机器人原点,1点为支链机架点,矩形为工作空间投影。显然,1为矩形相对支链机架点1的最远极限位置;1为矩形相对支链机架点1的最近极限位置。依据圆弧投影法,将工作空间极限点1、1往平面1上进行圆弧投影,即以1为圆心、11为半径作圆,得到投影点2;以1为圆心、11为半径作圆,得到投影点2。计算投影点2、2和支链最佳工作区的关系,就可确定支链尺度是否满足要求且保证最佳运动状态。
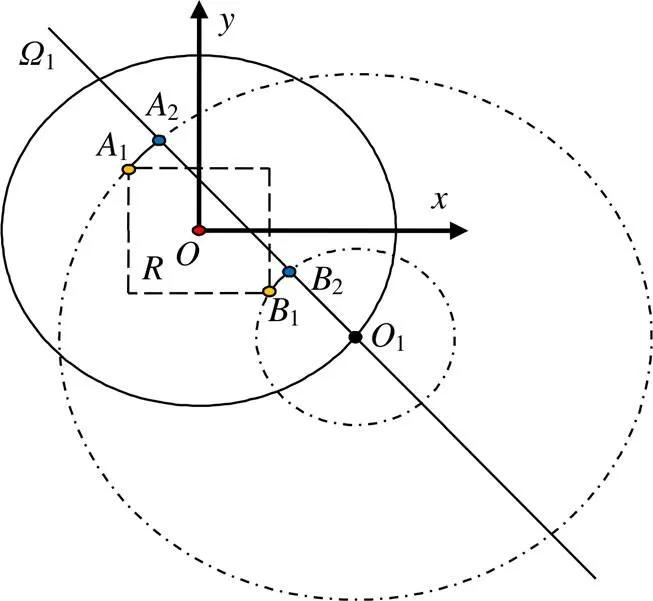
图5 并联机器人xOy几何投影
在图5中,建立基坐标系,根据给定工作空间要求,确定极限位置坐标1=(-100, 100, -400)、1=(100, -100, -400 )、1=(1,1, 0)。根据几何投影关系,在投影面上,得:
将极限投影位置转换到五杆机构中分析,可以在最佳工作区寻到最大矩形,即图6中的,坐标为:(160, -440)、(500, -440)、(500, -680)、(160, -680)。
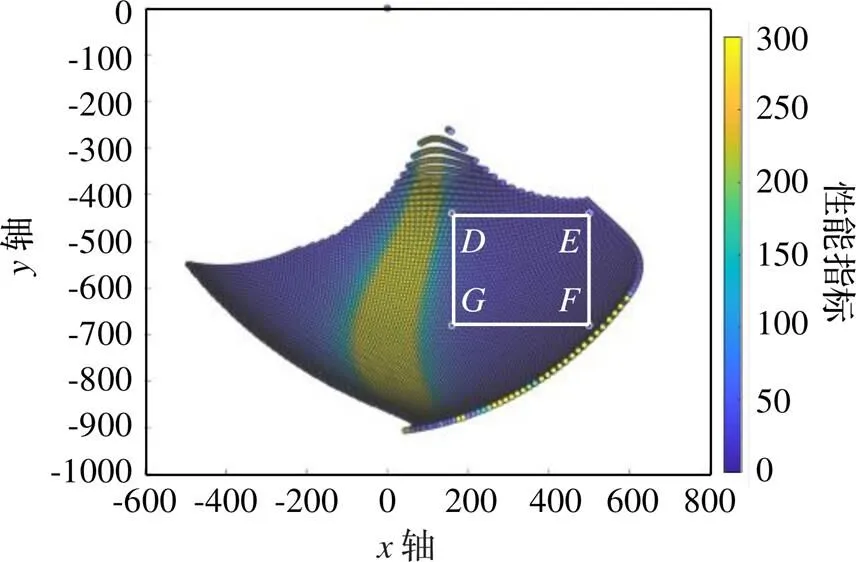
图6 支链五杆机构非奇异工作空间
确定支链五杆机构的最大矩形后,将点、点投影到平面得到2、2,如图7(a)所示。
支链机架需满足12<12且12>12,可见图7(a)支链机架位置并不满足条件,因此需调整1的位置。根据几何投影关系,机架安装范围具有两个极限位置,即2和2重合,1=304 mm,如图7(b);2和2重合,1=351 mm,如图7(c)所示。因此,可以确定支链机架点安装位置在以为圆心、半径分别为304 mm和351 mm的圆环内。
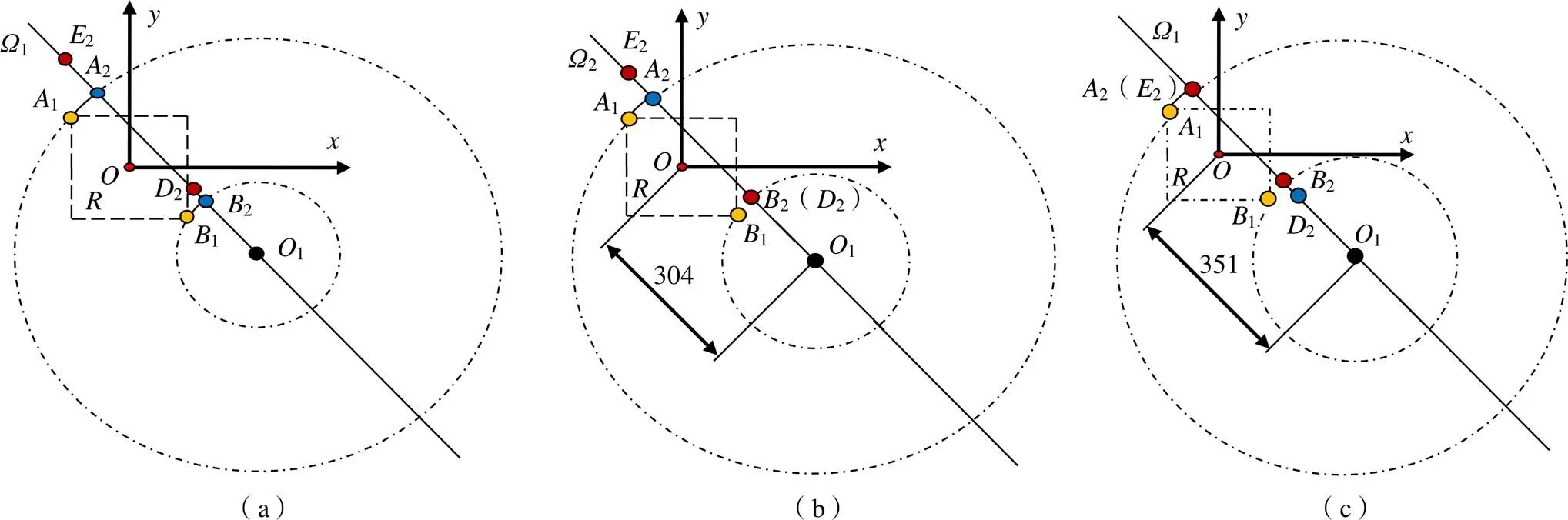
图7 五杆支链机架安装位置范围
基于对单支链五杆机构工作空间的分析和平面几何投影法,可以根据工作空间要求寻找支链的最佳工作区,实现多支链的、含可变动平台的并联机器人设计。假定以三支链并联机器人为例,按照所选择机构的尺寸关系,建立整个并联机器人系统,如图8所示。圆1和圆2形成的圆环即为支链可配置范围,运动过程中,可以根据可变动平台的位置和运动要求合理配置支链位置。
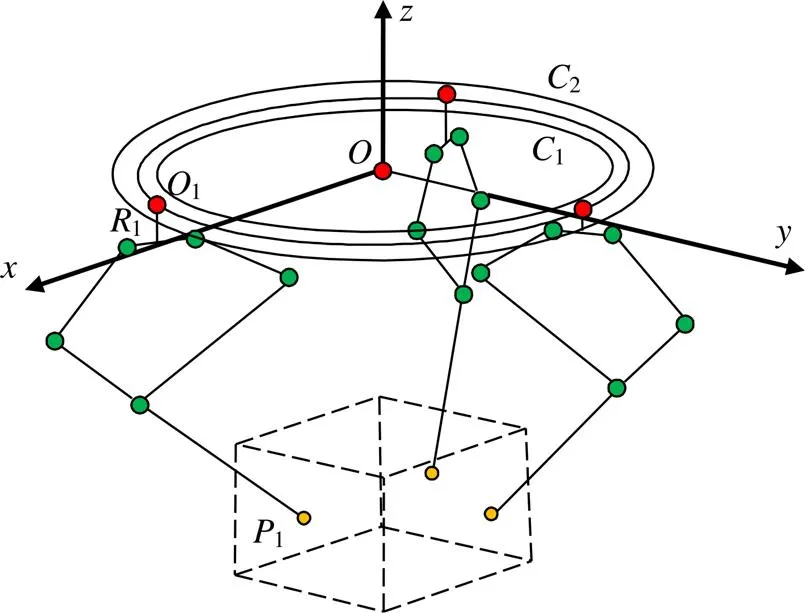
图8 三支链并联机器人结构
3 结论
本文通过解析和几何结合的方法完成了支链五杆机构的运动学建模和奇异性分析,综合出了支链五杆机构的性能评价指标。利用APSO算法,得到了具有最优性能的支链五杆尺度比例,为实现模块化支链提供了依据。
利用性能最优的五杆支链,针对不同的工作空间要求,提出了基于极限位置平面投影的工作空间分析方法,将并联机器人工作空间与支链五杆最佳工作区相联系,简化了三维空间分析过程,把工作空间作为设计要素纳入并联机器人设计之中,提高了并联机器人设计的有效性和透明度。同时,可以组合不同支链构型应对复杂的工作空间要求,有利于实现并联机器人的可重构设计。
[1]Merlet J P. Parallel Robots[M]. Dordrecht:Springer Science & Business Media,2014.
[2]翟庆钟,王卫兵,冯静安,等. 基于Stewart平台的六轴并联机床的研究[J]. 机械,2013,40(11):16-19.
[3]Shen H P,Meng Q M,Li J,et al. Kinematic sensitivity,parameter identification and calibration of a non-fully symmetric parallel Delta robot[J]. Mechanism and Machine Theory,2021(161):94-114.
[4]Liu Y J,Kong M X,Wan N. A Geometric Approach to Obtain the Closed-Form Forward Kinematics of H4 Parallel Robot[J]. Journal of Mechanisms and Robotics,2018,10(5):1942-1951.
[5]刘辛军,谢福贵,汪劲松. 并联机器人机构学基础[M]. 北京:高等教育出版社,2018.
[6]GosselinC. Adaptiverobotic mechanical systems: a design paradigm[J]. Journal of Mechanical Design,2016,128(1):192-198.
[7]Ye W,Fang Y F,Guo S. Reconfigurable parallel mechanisms with planar five-bar metamorphic linkages[J]. Science China Technological Sciences,2014,57(1):210-218.
[8]Markus Hoherwarter. 左台益,译. GeoGebra使用说明[M]. 台湾:国立台湾师范大学出版社,2009.
[9]Arrouk K A,Gogu G. CAD based unified graphical methodology for solving the main problemsrelated to geometric and manipulators[J]. Robotics and Computer Intergrate Manufacturing,2016(37):302-321.
[10]李旭,罗霞,罗成,等. 基于离散蒙特卡洛的一种3T1R并联机构工作空间分析[J]. 机械,2020,47(5):27-32.
[11]Wang Y,Belzile B,Angeles J,et al. Kinematic analysis and optimum design of a novel 2PUR-2RPU parallel robot[J]. Mechanism and Machine Theory,2019(139):407-423.
[12]马丽. 基于MATLAB的小型码垛机器人机构设计与仿真的研究[D]. 天津:天津科技大学,2016.
[13]余胜威. MATLAB优化算法案例分析与应用[M]. 北京:清华大学出版社,2014.
[14]Verein Deutuscher Ingenieure,Entwicklungsmethodik für Mechatronische System[M]. Düsseldorf:Springer,2004.
Research on Parallel Robot Design Methods Based on the Performance Optimization and Configuration of Five-Bar Chains
XU Huaian,LIN Song,JIANG Jingyu
( School of Mechanical Engineering, Tongji University, Shanghai 201804,China)
With the diversification and complexity of motion requirements, the opaqueness of traditional parallel robot design methods and the invariance of the moving platform lead to deviations in design results and a low degree of flexibility. This paper therefore proposes a parallel robot design method based on the optimisation and configuration of the performance of a five-bar chain. Firstly, the analysis of the motion and singularity of the planar five-bar mechanism was completed using a combination of analytical and geometric methods. The scale synthesis of the five rods of the branch chain was completed according to the relevant performance evaluation indicators. Then, the planar geometric projection method is proposed to project the parallel robot workspace to the optimal working area of the planar five-bar mechanism. The design and configuration of the parallel robot is completed taking into account the requirements of the workspace and the motion performance, which improves the transparency of the design.
parallel robots;pivot chain five-bar mechanism;scale synthesis;workspace projection
TH112
A
10.3969/j.issn.1006-0316.2022.05.009
1006-0316 (2022) 05-0055-06
2022-01-18
徐怀安(1997-),男,山东聊城人,硕士,主要研究方向为并联机器人设计,E-mail:17853141235@163.com。*
林松(1957-),男,四川广元人,工学博士(德),主要研究方向为产品研发方法及其智能设计、虚拟产品生产及其数字孪生、智能装置及其人机协调、技术系统可靠性及其安全设计,E-mail:slin@tongji.edu.cn。
