多参数不确定的永磁同步电机自适应跟踪控制
2022-05-29包海强李小华
包海强,李小华
(辽宁科技大学 电子信息与工程学院,辽宁 鞍山 114051)
永磁同步电机(Permanent magnet synchronous machine,PMSM)具有体积小、结构简单、可靠性高等特点[1],广泛应用于各行各业[2]。然而PMSM调速系统存在诸多非线性因素[3]和不确定性因素[4],影响系统的调速性能。为了研究方便,人们往往假设电机参数不发生变化,但实际情况却不尽然。如果电阻在工作时发热,定子电阻随着温度的升高其阻值必然会发生改变[5]。当电机工作在不同的状态时,其参数也会发生变化[6]。
为此,文献[7]考虑了参数的不确定性,但是仍旧假设电阻、电感等参数是不变的。文献[8]考虑了电阻和电感的变化,采用H∞控制实现了系统的鲁棒控制,但H∞控制只能处理非结构性不确定问题,对不确定性问题有局限性。文献[9-10]使用反演法解决了永磁同步电机系统的控制问题,但未考虑负载转矩为不确定参数。文献[11-12]使用递归最小二乘法辨识电阻和电感,但最小二乘法很容易受极端异常点的影响。文献[13-14]使用模型自适应方法分步辨识参数,先辨识定子电感,再辨识电子电阻,但后者的辨识精度受前者的影响,且参数辨识速度较慢。文献[15-16]采用遗传算法将参数定子电阻、d轴、q轴电感和永磁体链的辨识问题转化为参数优化问题,但该算法计算量较大,且容易陷入局部最优。以上方法均把负载转矩视为不变参数,事实上,外部扰动会使负载转矩发生改变。目前为止尚未发现将负载转矩考虑为不确定参数的文献。
为了提高PMSM抗负载转矩干扰的性能,本文将电阻、电感和负载转矩视为不确定参数,提出一种基于反演法的自适应跟踪控制方法。该方法基于PMSM的数学模型,针对电阻、电感和负载转矩这三种不确定参数设计系统的自适应律,并用反演设计方法得到PMSM的自适应跟踪控制器,该控制器可以保证PMSM的角度能够准确地跟踪参考信号,且系统中其他的信号都是全局渐近稳定的。相比负载转矩为确定参数的控制方案,此方案能获得更好的抗负载转矩干扰的性能。
1 永磁同步电机的数学模型
采用文献[17]中给出的永磁同步电机数学模型
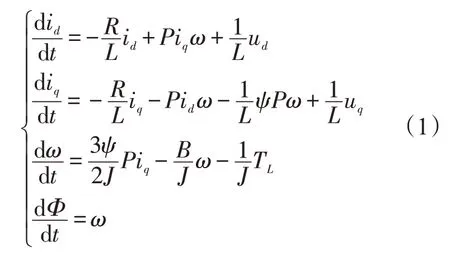
式中:id为电机d轴电流,A;iq为q轴电流,A;ω为角速度,rad/s;Φ为角度,rad;ud、uq分别为d轴电压和q轴电压,V,是电机的控制输入;J为转动惯量;R表示定子电阻;L表示d轴和q轴的等效电感;TL为负载转矩,包括电机所带负载的负载转矩和由于扰动而引入的扰动转矩;P代表极对数;B为粘滞摩擦系数;ψ为永磁磁通。
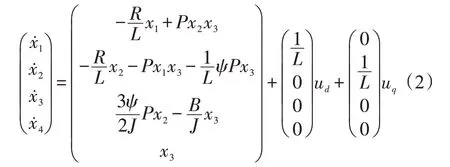
为了得到系统的状态空间表达式,设状态x1=id,x2=iq,x3=ω,x4=Φ,则输出y=x4。因此,模型(1)可写为
系统(2)为非严格反馈系统,不适合使用反演法设计其控制器。为了得到系统(2)的严格反馈系统,文献[17]给出经微分几何方法变换后的严格反馈系统
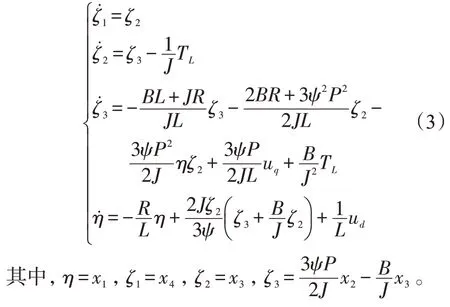
这里,将PMSM模型中的负载转矩、电阻和电感考虑为不确定参数,记θ1=TL,θ2=R,θ3=L。
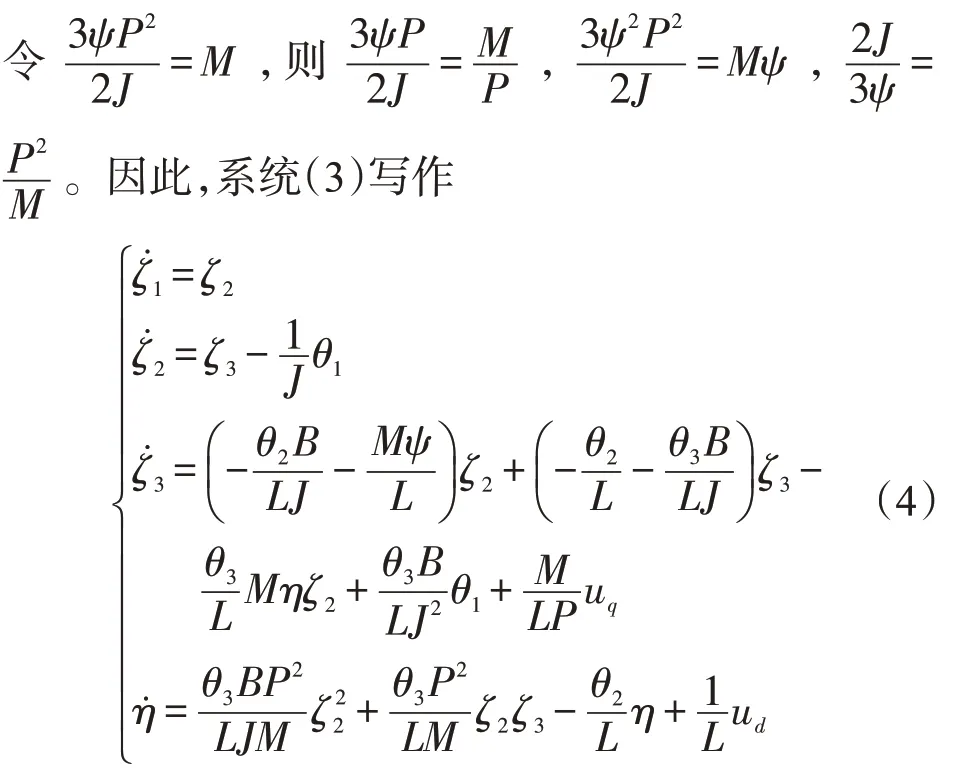
本文将利用反演法设计系统(4)的自适应跟踪控制器,保证闭环系统全局渐近稳定,其输出信号可快速地跟踪上期望轨迹,并且系统具有抗负载转矩扰动的性能。
假设1期望跟踪信号yr及其导数y(i)r(i=1,2,3)连续并且有界。
2 自适应反演控制器设计
基于反演法的自适应控制方法能够很好地处理参数的不确定性。因此,这里使用该方法来设计系统(4)的控制律和参数自适应律。
首先给出坐标转换
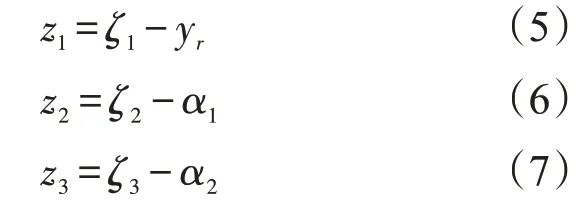
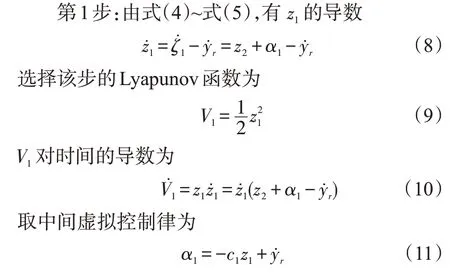
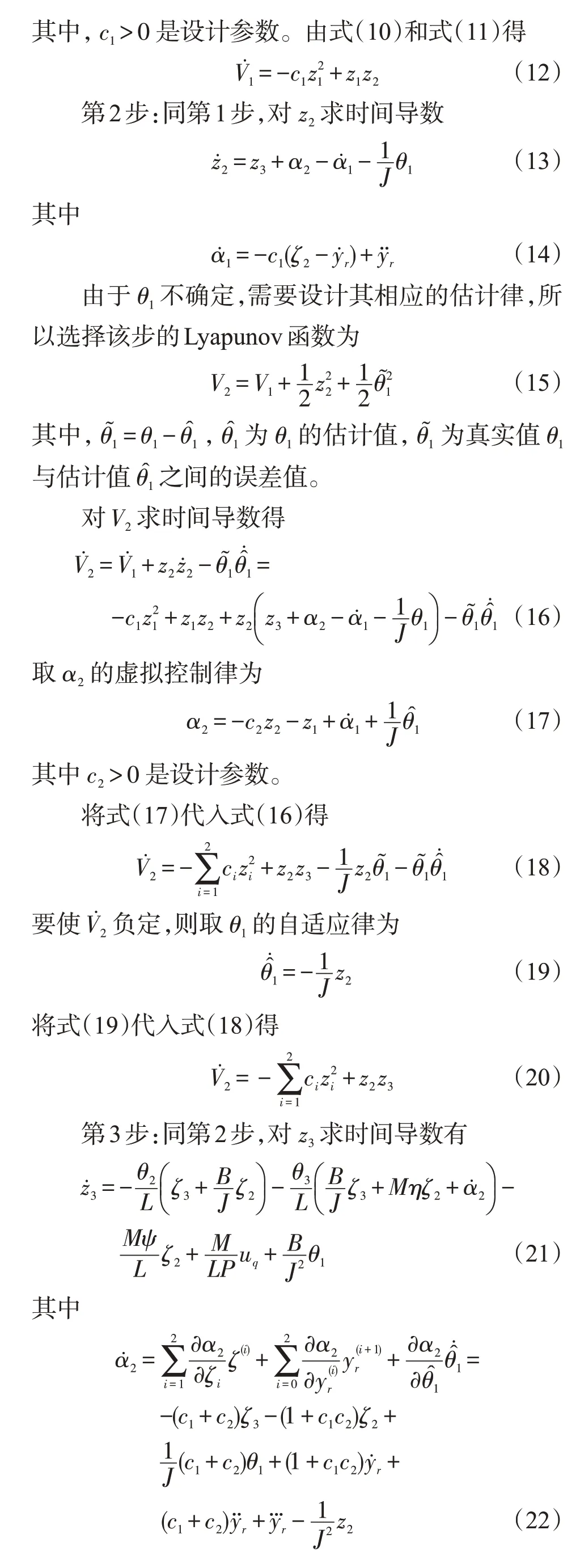
其中,α1、α2是中间虚拟控制律,通过以下推导来选取。
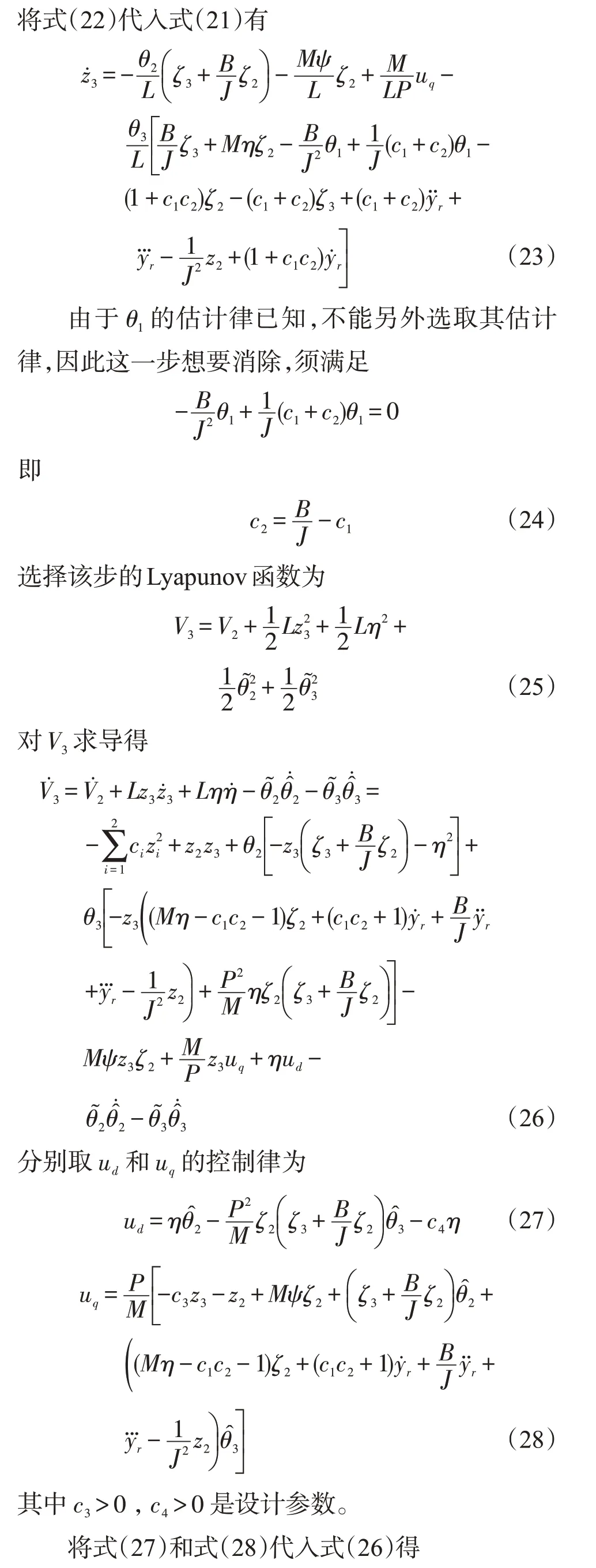
由此可看出,V˙3为负定。
根据上述推导,可以得到下述定理:
定理1对于满足假设1的永磁同步电机系统(4),如果虚拟控制律、实际控制律及自适应律按照式(11)、(17)、(27)、(28)、(19)、(30)和(31)设计,则系统满足:(1)该系统的输出信号y(t)可快速地跟踪上期望轨迹,且闭环系统全局渐近稳定;(2)系统对负载转矩扰动具有抑制性能。
证明根据李雅普诺夫稳定性定理和式(32)可知,在上述控制律及自适应律作用下,系统(4)是全局渐近稳定的。
又由于该控制器对负载转矩扰动具有自适应性,因而可很好地抑制负载转矩波动对系统的影响。
3 仿真研究
参照文献[3]中的PMSM控制系统,其电机参数为:J=0.000 85 kg·m2,TL=4 N·m,R=2.76Ω,L=0.006 42 H,B=0.02,P=4,ψ=0.204 Wb。
对上述系统设计控制器,其设计参数及初始值选为:c1=10,c2=14,c3=30,c4=30;ζ1(0)=0.1,ζ2(0)=0,ζ3(0)=0,η(0)=0;θ1(0)=0.1,θ2(0)=0.4,θ3(0)=0.3;给定期望的跟踪信号为yr=3 sint。根据定理1得到系统的控制律和自适应律。
采用Matlab对所设计的控制器进行仿真,结果如图1~图7所示。为了说明本文控制器对负载转矩的波动具有抑制作用,在t=3.5 s时将该系统的负载转矩增加为TL=6 N·m,采用相同的控制器对系统进行仿真,结果也显示在图1~图7中。
图1表示系统输出角度的跟踪效果。输出能准确跟踪期望信号,证明了控制器的有效性。且在加入负载扰动后,输出仍然能精确地跟踪,说明此方法对负载干扰具有抑制能力。
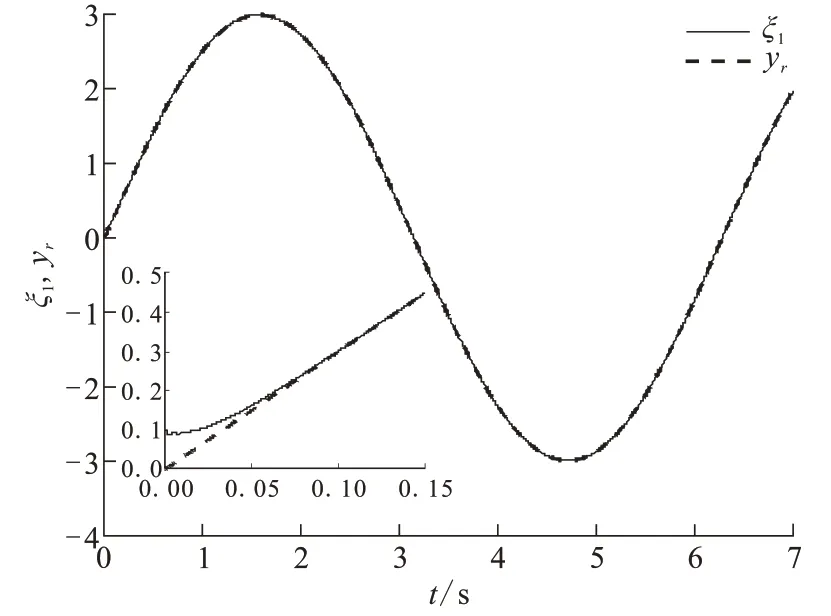
图1 角度位置跟踪曲线Fig.1 Angle position tracking curve
图2表示系统跟踪误差曲线。跟踪误差很快收敛到零,且在加入负载扰动后,跟踪误差仍然保持为零,说明该控制器具有较强的抗负载干扰能力。
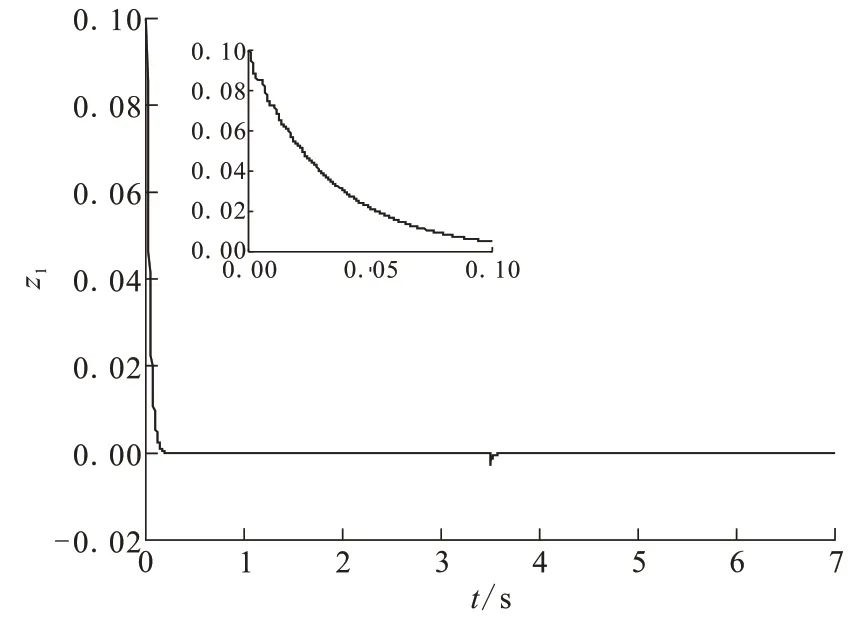
图2 跟踪误差曲线Fig.2 Tracking error curve
图3表示永磁同步电机角速度ζ2的输出曲线。说明该信号稳定。在t=3.5 s时刻有毛刺,是因为此刻加入了负载干扰,由于控制器的控制作用,毛刺很快消失,也证明了控制器的抗干扰能力。
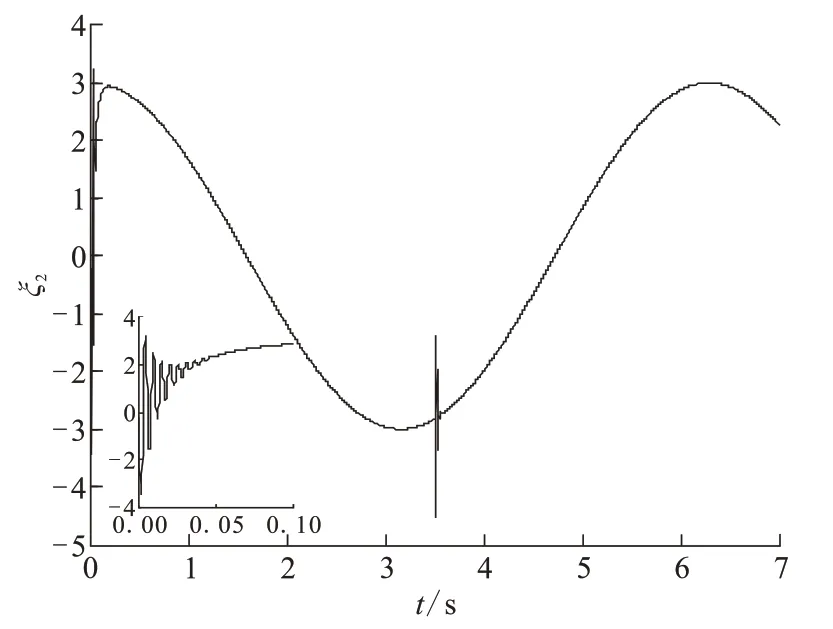
图3 角速度Fig.3 Angular speed
图4表示状态ζ3的输出曲线,表明ζ3在加入干扰前后都是稳定的。
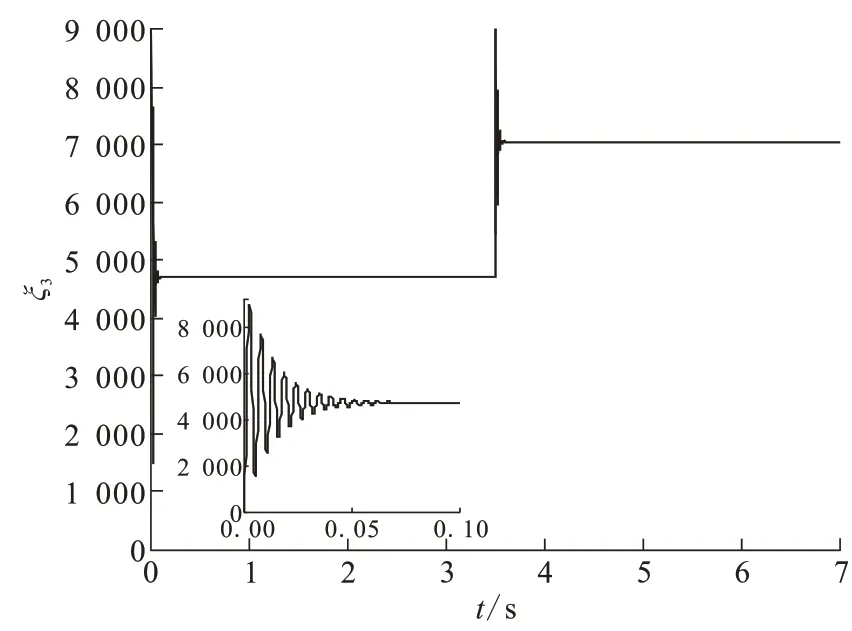
图4 状态ζ3的响应曲线Fig.4 Response curve of stateζ3
图5表示永磁同步电机d轴电流的输出曲线。加入扰动后d轴电流几乎无波动,说明其信号稳定。
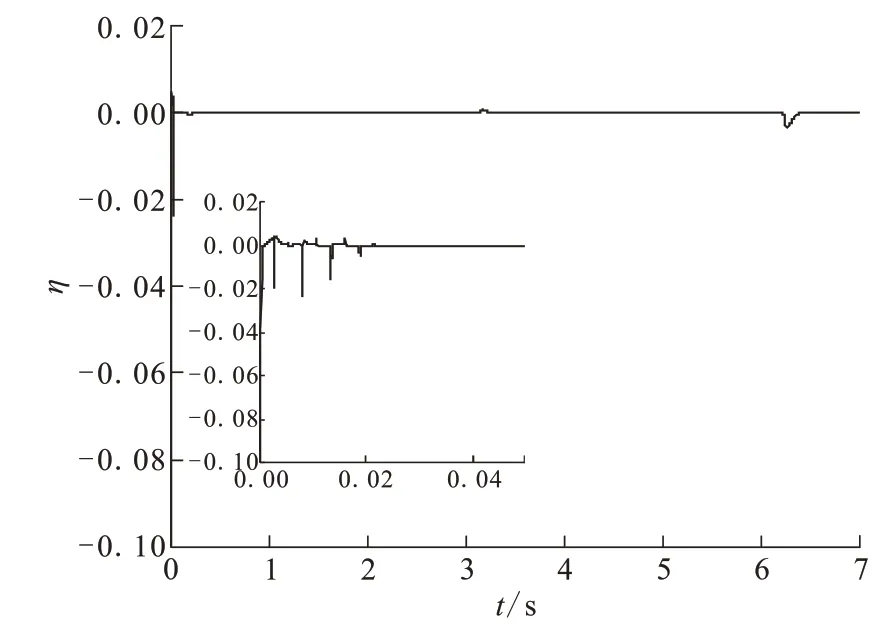
图5 d轴电流Fig.5 d axis current
图6和图7分别为永磁同步电机的q轴和d轴控制电压输入曲线。这两个控制电压的大小是符合实际情况的,说明本文控制设计是合理的。

图6 q轴控制电压Fig.6 q axis voltage
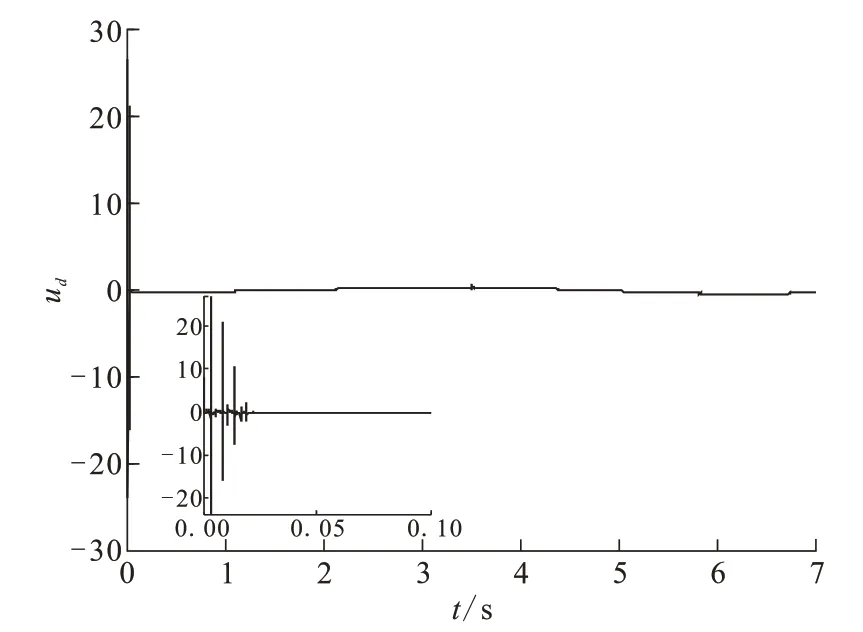
图7 d轴控制电压Fig.7 d axis voltage
本文设计的控制律及自适应律可以保证永磁同步电机的输出能够快速准确地跟踪期望轨迹,而且系统中的所有信号是渐近稳定的。仿真结果表明本文所设计控制器的有效性。且当负载转矩增大后,系统的跟踪性能没有发生任何变化,验证了系统具有抗负载转矩扰动的性能。
4 结论
本文针对一个含有d轴和q轴的等效电感、定子电阻和负载转矩等3个不确定参数的PMSM系统,采用反演法设计了系统自适应跟踪控制器。与其它文献不同的是,本文将负载转矩设为不确定参数,使系统对负载转矩波动具有抑制性能。反演自适应跟踪控制策略能使系统的输出信号快速跟踪上期望输出,同时闭环系统是全局渐近稳定的,并且具有很好的抑制负载转矩扰动的控制效果。仿真结果表明该方法的有效性和抗负载转矩扰动的优良性能。
