基于LabVIEW机器视觉的智能车库系统设计
2022-05-27樊源盛闫凯达
樊源盛,李 微,闫凯达
(天津理工大学 电气工程与自动化学院,天津300384)
2021年9月10日,国家发改委办公厅、住建部办公厅、公安部办公厅、自然资源部办公厅联合印发《关于近期推动城市停车设施发展重点工作的通知》,要求推动城市停车设施发展,切实增加城市停车设施有效供给,充分挖掘停车资源潜力。随着社会生产力的不断提高,汽车数量大幅度增长,“停车慢,停车难”依旧是人们需要攻克的难关。
目前车库大多没有配套智能管理系统,通常采用人工管理模式,导致无法明确知道车位余量、快速找到空闲车位,效率较低。随着科技的发展,当前已经有部分车库在管理系统中加入了空车位引导系统,收费模块等等。但是,现有的车库和研究仍尚待改进。比如文献[1-2],优点是优化了收费系统,增添了预约功能,但是缺乏对车辆最优路径的规划。对于这类问题,开发更高效的路径引导系统具有重要的现实意义。本文基于LabVIEW 视觉模块和Floyd 算法,对车辆进行最优路径规划,提高了车库的停车效率,更经济有效地解决了“停车慢、停车难”的问题。
1 概述
本文车库分为硬件系统和软件系统[3]。硬件系统包括门禁系统,路径指示系统和车位检测系统;软件系统分为车牌识别系统和路径规划系统。车位检测系统实时判断车位是否被占用,并将车位信息传递到路径规划系统。车辆驶入时,门禁系统和车牌识别系统分别负责控制车辆进出以及采集车牌信息,同时将采集到的车牌信息传入路径规划系统,由其为车辆设计最优路径,继而由路径指示系统指引车主,直到车辆停入。具体的车库结构如图1所示。
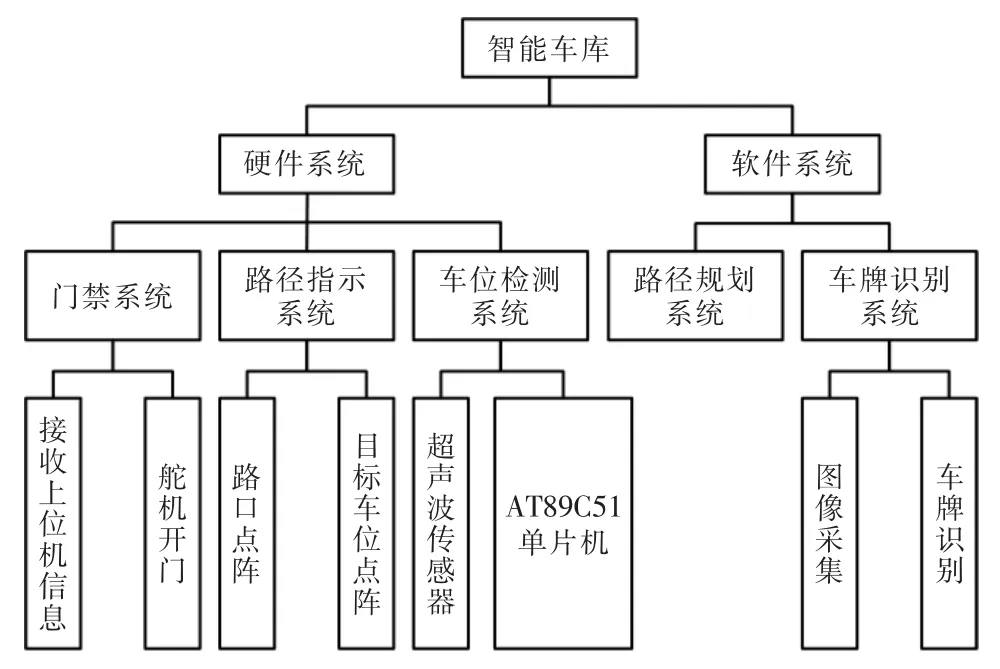
图1 智能车库结构图Fig.1 Structure diagram of intelligent garage
2 硬件系统
智能车库硬件组成部分主要有STM32 主控制器、AT89C51 单片机、MAX7219LED 点阵模块、HCSR04 超声波传感器、MG996R 55g 金属齿轮数码舵机。每个HC-SR04 超声波传感器负责实时判断车位是否被占用。LabVIEW 视觉模块负责收集车辆到来的信号,STM32 主控制器通过串口通信接收到该信号,由此控制门禁系统开门。结合当前的车库信息,路径规划系统为车主设计最优路径,并通过AT89C51 微机控制MAX7219LED 点阵进行路径指示以及目标车库显示,使车主正确、高效停车入库。各部分硬件之间的信号传输和具体的功能如图2所示。
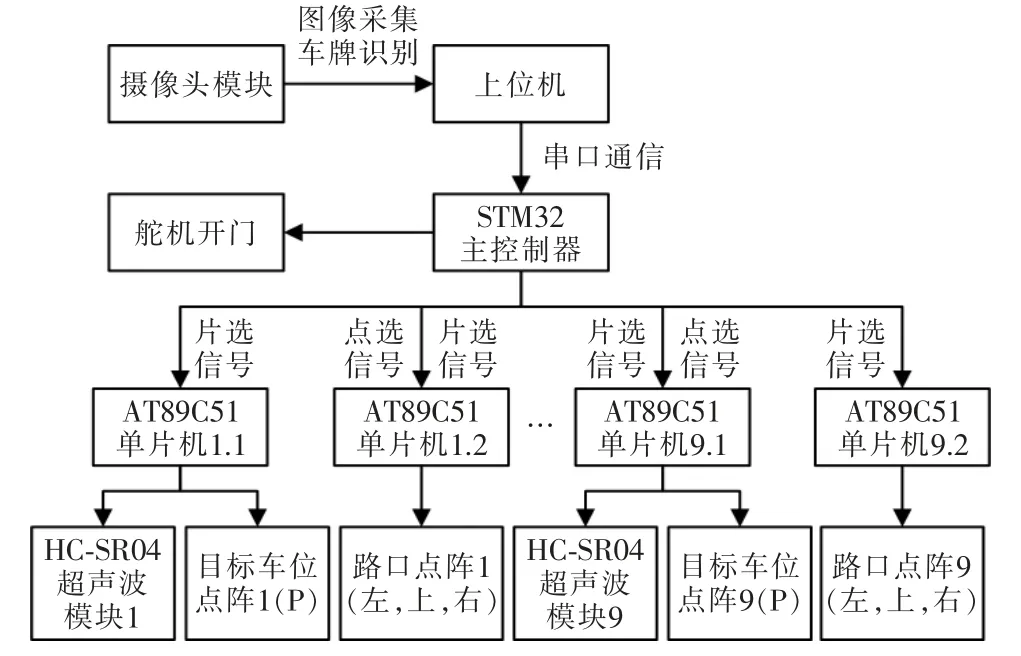
图2 硬件框图Fig.2 Hardware block diagram
2.1 门禁系统
LabVIEW 视觉模块负责收集车辆到来的信息,并将信息传递到STM32 主控制器,控制器会根据此信息控制门禁舵机的开启和关闭。舵机的控制需一个20 ms 时基脉冲,该脉冲的高电平部分为0.5 ms~2.5 ms 范围内的角度控制脉冲。本文采用180°角度伺服,对应的控制关系是脉冲设置为0.5 ms,旋转角度为0°;脉冲设置为1.0 ms,旋转角度为45°,以此类推。本文脉冲设置为1.5 ms,旋转角度为90°,由STM32 单片机控制,延迟一段时间后,自动回零。
2.2 路径指示
路径指示由STM32 主控制器、AT89C51 单片机片选信号和方向信号,LED 点阵分为路口点阵和目标车库点阵。AT89C51 单片机通过对点阵LOAD,DIN 和CLK 三个引脚控制点阵点亮形式。路口点阵置于路径前方,分别点亮向左、向上、向右的箭头引导车辆入库,目标车库点阵点亮“P”示意车库空闲。
2.3 车位检测
车位检测由AT89C51 单片机控制HC-SR04 超声波传感器完成。将超声波传感器放置在车位侧面,AT89C51 单片机控制超声波模块的Trig 和Echo两个引脚接收传感器采集的车位信息。为防止发射信号对回响信号的干扰,触发信号周期为60 ms 以上。通过超声波传感器采集传感器与车辆之间的距离,设置相关阈值。若采集的数据小于阈值,超声波传感器将信号发送至AT89C51 单片机以表车位被占用。在获得数据后,使用电平通信将此信息传递给STM32 主控制器。
2.4 车库模型方案设计
地图的设计结合了医院、商场和小区的布局,研究了这些场所的车位和路线排布,本文设计了9个停车位按照从入口到停车位的路程,分3 档分散在地图里,同时增加了一些街道上常见的复杂地况,如环岛、单行线非平行路面等道路,更贴合实地车库,如图3所示。
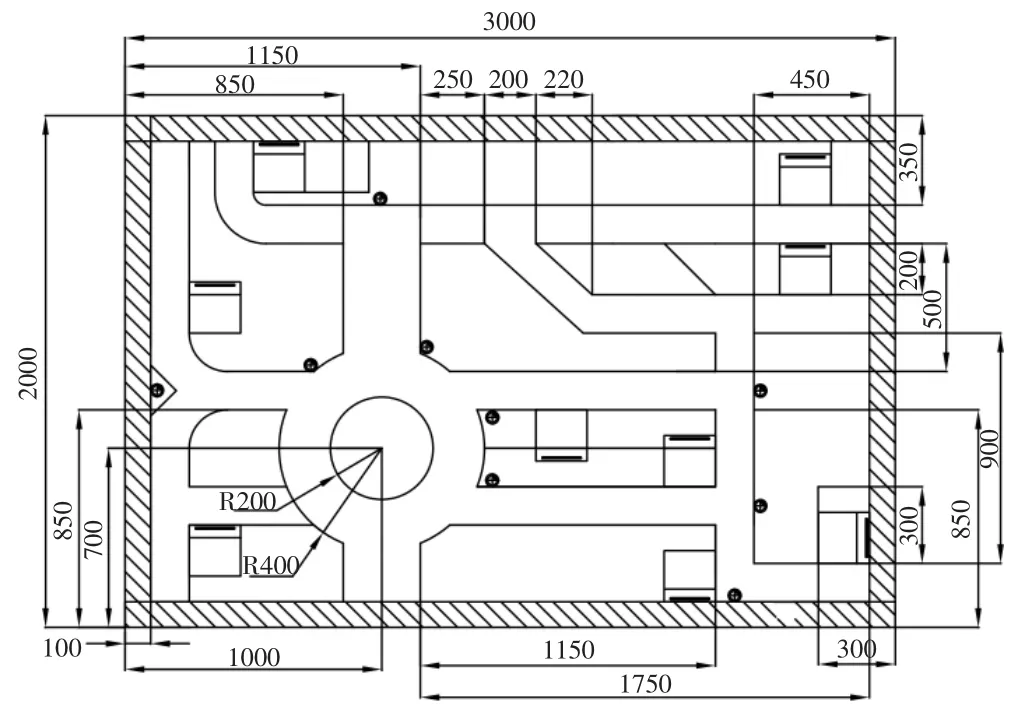
图3 车库模型俯视图Fig.3 Top view of garage model
3 软件系统
3.1 LabVIEW 视觉模块的车牌识别与通信
本文选择LabVIEW 中NI Vision 模块进行对车牌的采集、处理和OCR 识别,并通过串口发送识别结果与当前车辆进入时间,具体流程如图4所示。
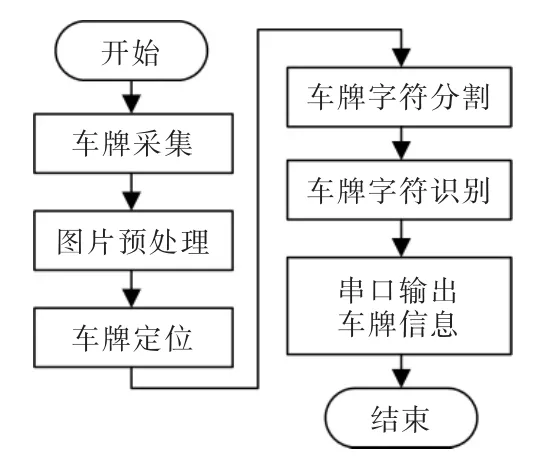
图4 LabVIEW 程序流程Fig.4 Flow chart of LabVIEW program
3.1.1 车牌图像的获取与处理
(1)摄像头获取图像
利用LabVIEW[4]中的IMAQdx 模块函数:Open Camera VI,Configure Grab VI,IMAQdx Grab2 VI,IMAQ Write File 2 VI 新建并抓取工业摄像头的实时画面,并且2000 ms 刷新一次抓拍内容,之后将车牌图像进行保存。
(2)车牌图像的处理
利用LabVIEW[5]中的NI Vision 模块函数:Threshold,Basic Morphology,Gray Morphology,Adv。Mor phology,Particle Analysis 解析图像,利用Image Buffer将图像存入缓存,之后进行遮罩处理、灰度处理和“二值化”处理,并进行合理腐蚀,程序自动将识别区域截取出来。
3.1.2 车牌图像的OCR 识别
利用LabVIEW[6]中的NI Vision 模块函数中OCR功能,对处理后的图像进行文字识别,在此之前,对全国各省市车牌所有可能出现的汉字数字与英文字母进行了训练,确保了文字识别结果的可靠性。最后将文字识别结果输出到前面板。
3.1.3 车牌数据与当前时间的串口通信
利用LabVIEW 中VISA 配置串口VI,使VISA资源名称指定的串口按特定设置初始化。通过连线数据至VISA 资源名称输入端,将车牌号与当前时间一起发送给MCU STM32 主控制器,对于连续的两次传输,若车牌号一致则不发送,等待车牌号的下一次更新,如图5所示。
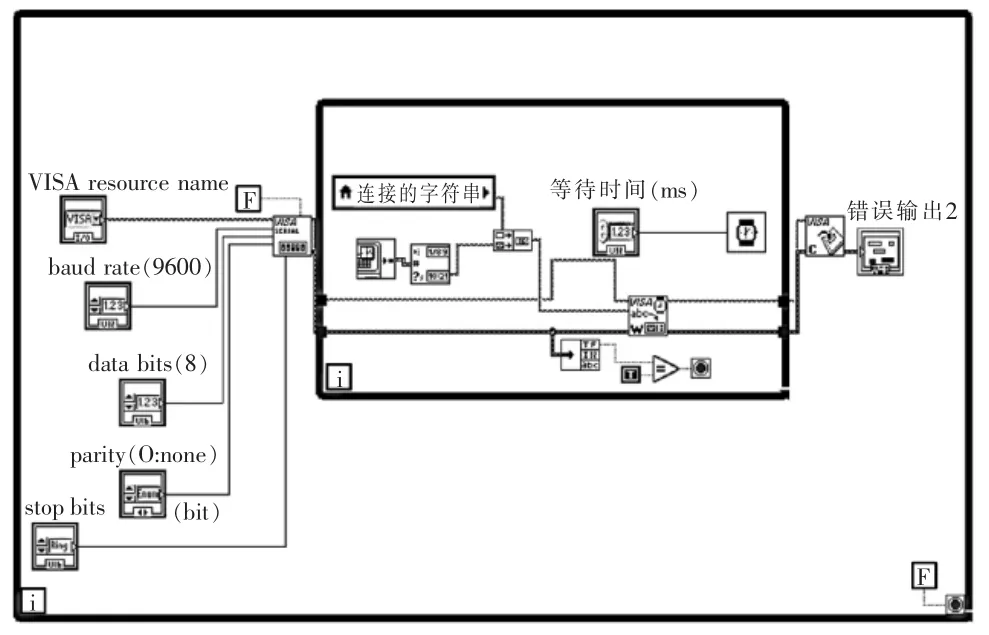
图5 发送车牌数据与当前时间程序示意图Fig.5 Program diagram of sending license plate data and current time
3.2 最短路径算法
在车库的路径规划方面,需要解决的问题是如何在散落分布,实时变化的车位中找到最近的单位,并规划路径。为此采用了Floyd 算法,它可以解决多个节点之间的最短路径问题,并且求出对应的路径规划与路程。程序实现上,Floyd 算法非常简洁,而且算法的运算结果中,最短路程矩阵和途径节点矩阵都可以重复利用,提高了运算效率。其中最短路程矩阵可以用来判断最近的空车位的位置,途径节点矩阵可以为路径指示系统提供路口方向信息。
算法过程如下:
首先,把所有路口当作节点,将所有相邻节点之间的路程记入最短路径矩阵中,不相邻或达不到的节点间记为无穷大。对每对节点重新计算路程,看是否存在中间节点,使得经过该节点的路径比原路径更短。如果有,将该节点记入途径节点矩阵中,并更新最短路径矩阵信息。更新一遍后,得出了最终的最短路程矩阵和途径节点矩阵。在查找从节点u到节点v的最短路径时,先查找途径节点矩阵,若无中间节点信息,则u-v为最短路径,若有中间节点信息m,则再依次查找u-m与m-v的最短路径,结果即为最短路径,程序流程如图6所示。
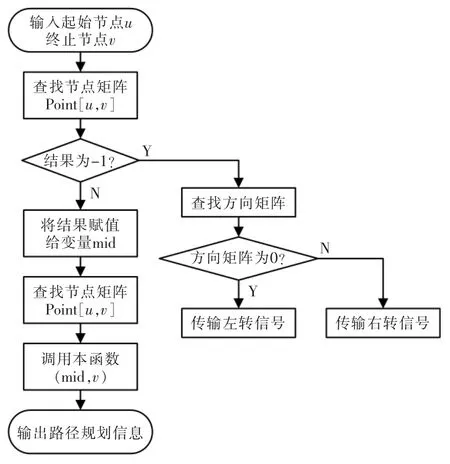
图6 最短路径算法流程Fig.6 Flow chart of shortest path algorithm
4 功能测试
4.1 门禁系统模型
下位机MCU 模块在收到LabVIEW 发送的车辆到来信号后,控制门禁系统开启,舵机开合角度0~90°,并且在短暂延迟后关闭,门禁系统模型如图7所示。
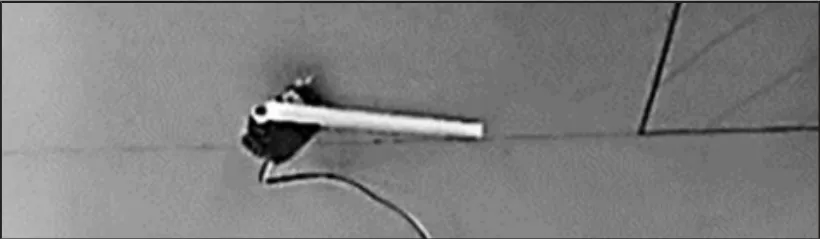
图7 门禁系统模型FIg.7 Model diagram of access control system
4.2 车牌识别模块
当车辆驶入时,通过上位机LabVIEW 软件的视觉模块控制摄像头检测并识别车牌信息,通过串口通信下发至STM32 单片机,进行车牌信息储存和车辆入库准备。在测试中要保证识别过程中光源的稳定供给以及车牌表面的整洁程度,不然会影响实验结果。车牌识别模型与车牌识别上位机界面如图8 和图9所示。
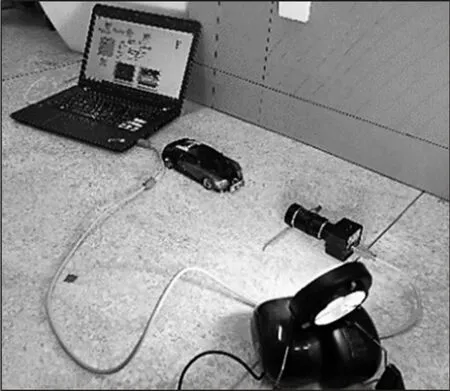
图8 车牌识别模型Fig.8 License plate recognition model
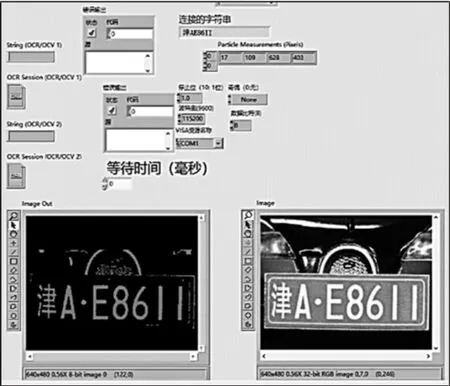
图9 车牌识别上位机界面Fig.9 Interface of license plate recognition PC
当车辆驶入时,通过上位机LabVIEW 软件的视觉模块控制摄像头检测并识别车牌信息,通过串口通信下发至STM32 单片机,进行车牌信息储存和车辆入库准备。在测试中要保证识别过程中光源的稳定供给,以及车牌表面的整洁程度,不然会影响实验结果。
4.3 路径规划和路径指示系统模型
路径指示系统所需硬件部分为STM32 主控制器、AT89C51 单片机和LED 点阵。由亚克力板制作车库模型,阴影部分表示楼房等地标,路面标有箭头指示行进的方向,LED 点阵在路口指示出路径规划的路径,每个停车点配有传感器,用白色物块表示有车辆停靠。智能车库测试模型如图10所示,硬件连接模型如图11所示。

图10 智能车库测试模型Fig.10 Intelligent garage test model
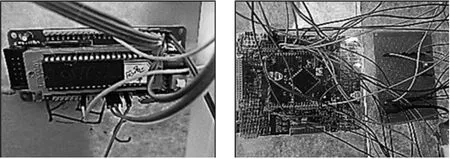
图11 硬件连接模型Fig.11 Hardware connection model
4.4 车位检测模型
超声波传感器用来检测是否有车辆入库,将信息传递给AT89C51 单片机,STM 主控制器分析处理信息后,通过Floyd 算法规划出最短路径。在路径指示系统中,还存在车库的点阵点亮“P”提醒车主停车入库,双重保证。在车辆到来后将LED 点阵熄灭。
但是值得注意的是,超声波检测最好适用于平面,否则会出现不稳定干扰。目标车库模型如图12和图13所示。
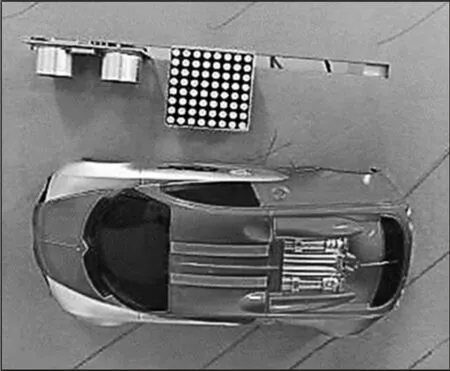
图12 目标车库模型(有车)Fig.12 Target garage(with car)
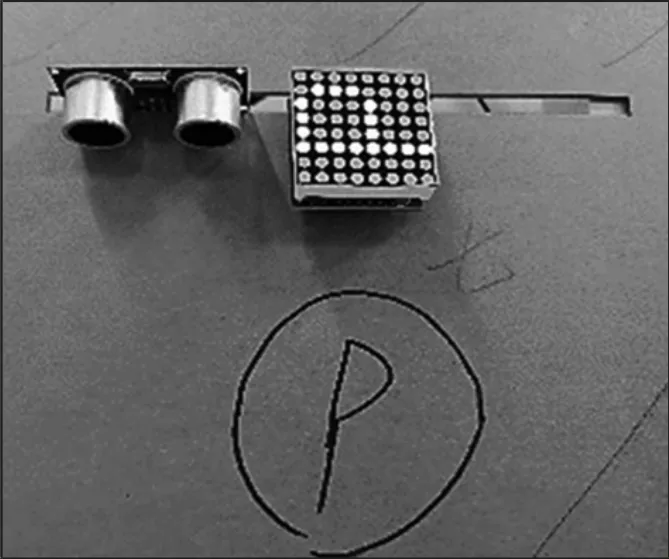
图13 目标车库模型(无车)Fig.13 Target garage(no car)
5 结语
智能停车系统集停车场门禁系统、最短路径规划、路口指示和车位检测为一体,既优化了停车管理环节,又降低了车主的停车时间成本,是解决城市停车问题建设智慧城市的发展趋势。本文整体设计结果较为完善,模拟结果良好,可当作商用停车厂设计的参考。
