基于改进型扩张状态观测器的振镜系统滑模控制策略
2022-05-27赵瑞刘丙友王力超
赵瑞 刘丙友 王力超
摘 要:提出一种基于改进型扩张状态观测器的滑模控制策略.结合滑模控制理论,用最优控制函数代替传统非线性函数,用卡尔曼滤波器对系统噪声进行处理,对扩张状态观测器进行改进,更好地对振镜系统的总扰动进行观测和补偿.仿真实验结果表明,该控制策略有效提高了振镜系统的跟踪性能,具有较好的抗干扰能力和噪声抑制能力.
关键词:振镜系统;扩张状态观测器;卡尔曼滤波器;滑模控制
[中图分类号]TP273 [文献标志码]A
振镜系统作为一种光学扫描系统,因具有高响应、高精度等优点而被广泛应用于激光扫描、成像、加工等领域.[1]随着高速相机等硬件技术的完善,人们逐渐对肉眼难以察觉的近距离高速移动目标产生了高度关注.Kohei Okumura等人于2010年成功搭建了第一个毫秒级的高速视觉控制器,采用二维振镜光学原理,代替了传统云台进行高速目标跟踪.[2]振镜的位置角控制极易受到外部干扰以及噪声的影响,将高性能的控制算法引入振镜伺服控制系統中变得尤为迫切.
目前,大多数振镜系统采用传统的PID调节,具有一定的控制效果,但是不足以解决振镜系统的强耦合、非线性等问题.针对这些问题,朱照杨等人研究了PID加前馈控制.[3]Qiao等人设计了一种内模控制的振镜控制系统,采用电流环和速度环的双环控制,相比传统PID控制有更快的响应速度和控制精度.[4]岳宗仰针对振镜系统的不确定性,提出了一种新的分数阶鲁棒控制器,提高了系统的鲁棒性和抗干扰性能.[5]刘琛提出了一种滑模变结构滑模控制,具有一定的抗干扰能力,削弱了传统滑模控制的抖振现象.[6]Qin等人针对振镜系统的高精度、高响应等要求,提出了一种基于自抗扰控制的高精度位置控制方案,提高了振镜系统的位置控制精度.[7]
本文提出一种基于改进型扩张状态的滑模控制方案,在传统扩张状态观测器[8-10]的基础上,引入基于趋近律的滑模控制理论[11],采用卡尔曼滤波器对系统噪声进行处理,设计改进型扩张状态观测器,更好地对振镜系统的总扰动进行实时观测和补偿.
1 振镜系统的数学模型
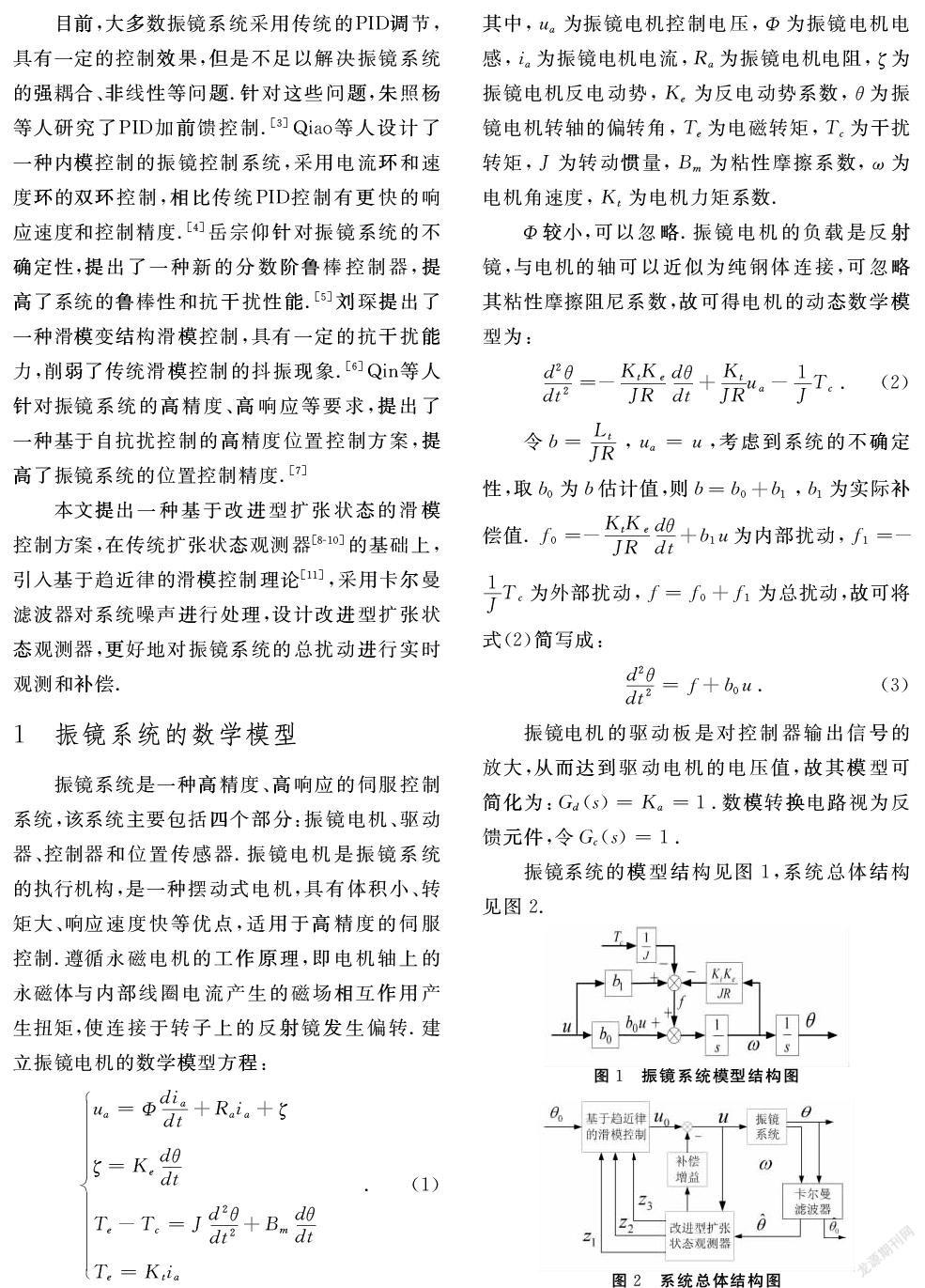
振镜系统是一种高精度、高响应的伺服控制系统,该系统主要包括四个部分:振镜电机、驱动器、控制器和位置传感器.振镜电机是振镜系统的执行机构,是一种摆动式电机,具有体积小、转矩大、响应速度快等优点,适用于高精度的伺服控制.遵循永磁电机的工作原理,即电机轴上的永磁体与内部线圈电流产生的磁场相互作用产生扭矩,使连接于转子上的反射镜发生偏转.
建立振镜电机的数学模型方程:
3 仿真分析
为了验证本文所设计的基于改进型扩张状态观测器的滑模控制策略在振镜系统中的性能,在Matlab/Simulink环境下进行仿真研究,比较基于改进型扩张状态观测器的滑模控制(改进型ESO-SMC)策略与传统基于扩张状态观测器的滑模控制策略[11](传统ESO-SMC).主要从四方面对方案的性能进行仿真分析:
(1)改进型ESO的扰动观测分析.
(2)振镜系统的跟踪性能分析.
(3)加干扰时振镜系统的鲁棒性分析.
(4)振镜系统的噪声抑制能力分析.
为保证两种方案对比的准确性和可靠性,其系统参数与控制器相关参数相同,振镜电机及控制器的参数见表1,改进型ESO-SMC参数见表2.
仿真实验结果见表3.从表3可以看出,改进型ESO-SMC在总体性能上明显优于传统ESO-SMC控制策略.
4 结论
本文提出了一种基于改进型扩张状态观测器的滑模控制策略,针对高精度、高响应的振镜系统中存在的未知扰动和噪声进行了观测和补偿,并用Routh-Hurwitz稳定性判据证明了系统的稳定性.仿真实验结果表明了基于改进型扩张状态观测器的滑模控制策略对振镜系统的跟踪性能的有效性.
参考文献
[1]李桂存,方亚毜,纪荣祎,等.基于二维振镜与位置灵敏探测器的高精度激光跟踪系统[J].中国激光,2019,46(7):206-212.
[2]Kohei Okumura,Hiromasa Oku and Masatoshi Ishikawa.High-speed Gaze Controller for Millisecond-order Pan/tilt Camera[J].IEEE International Conference on Robotics and Automation,2011,2011:6186-6191.
[3]王晓初,朱照杨,张国平.高速振镜伺服驱动的PID加前馈控制[J].微电机,2013,46(5):61-64+69.
[4]Qiao MR,Cao JZ,WangHW,et al.Galvanometer control system design of aerial camera motion compensation[C].Proceedings of SPIE-The International Society for Optical Engineering,2015,9678.
[5]岳宗仰.面向激光振镜系统的分数阶建模与控制[D].济南:山东大学,2020.
[6]刘琛.高速扫描振镜控制系统设计研究[D].太原:中北大学,2018.
[7]Qin WY,Guo H and Xu JQ,et al.High Precision Position Control based on Active Disturbance Rejection Control for Galvanometer Scanner System[C].2019 22nd International Conference on Electrical Machines and Systems,2019.
[8]周向阳,李玲玲,赵立波.基于扩张状态观测器的稳定平台非奇异终端滑模控制[J].仪器仪表学报,2018,39(5):161-169.
[9]王军晓,戎佳艺,俞立.直流降压变换器的降阶扩张状态观测器与滑模控制设计与实现[J].控制理论与应用,2019,36(9):1486-1492.
[10]周浩,郧建平,祁昶.基于扩张状态观测器的滑模控制算法研究[J].光通信技术,2021,45(5):21-25.
[11]孟一博,刘丙友,王力超.基于改进型自抗扰控制器的转台伺服系统高精度控制研究[J].牡丹江师范学院学报:自然科学版,2019(2):11-16.
[12]刘金琨.滑模变结构控制MATLAB仿真基本理论与设计方法[M].北京:清华大学出版社,2019.46-50.
[13]程林中,岳靖,王梅花,等.基于模糊-PID控制的井下温度控制系统研究[J].牡丹江师范学院学报:自然科学版,2015(4):20-22.
编辑:琳莉