七关节机械臂运动学及轨迹规划控制仿真分析
2022-05-23罗国荣
罗国荣
(广州科技职业技术大学,广州 510550)
0 引言
随着工业的不断发展、机器人技术的不断成熟,机械自动化、智能化需求日益增加[1-2]。通过机械臂代替人工完成物体抓取、搬运与安装工作[3-4],代替人类重复劳动的呼声越来越高。为此,笔者设计一种七关节机械臂,该机械臂具备臂展长、体积小、灵活性强的特点[5],同时,在工作过程中,通过基于非线性预测模型的机械臂轨迹规划控制算法,使机械臂具备避障功能,从而更加适应工业环境中的工作需要。为了验证机械臂结构设计的合理性,采用雅可比矩阵法对七关节空间机械臂进行了建模分析,通过MATLAB的预测模型工具箱对其进行了轨迹规划控制仿真,并分析了其运动曲线。
1 七关节机械臂运动学模型
七关节机械臂由基座、中间连杆、工作末端等8个连杆组成[6],采用标准D-H参数法建立七关节空间机械臂连杆坐标系,为方便建模,z轴与i+1关节轴线重合,工作末端坐标为坐标系i8{x8,y8,z8},最后,再根据右手定则确定各个坐标系的x轴xi,y轴yi和z轴zi,建立的机械臂各关节及连杆间的参考坐标系如图1所示,机械臂模型如图2所示。

图1 七关节机械臂连杆坐标系
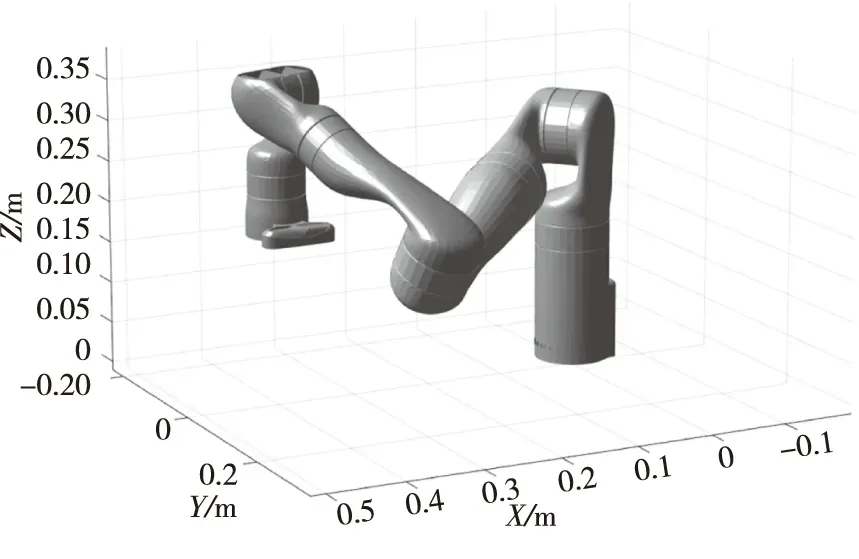
图2 七关节机械臂仿真模型
机械臂运动学方式模型为[7]
(1)
式(1)中,M为机器臂在空间的位姿矩阵;qi为机器臂各个关节变量;i为关节,当i为转动关节时,si为1,否则为0;θi为关节回转量;di为关节平移量。
根据式(1)设计七关节机械臂的运动学方程,该机械臂为转动关节,其机械臂几何参数和关节运动参数如表1所示。
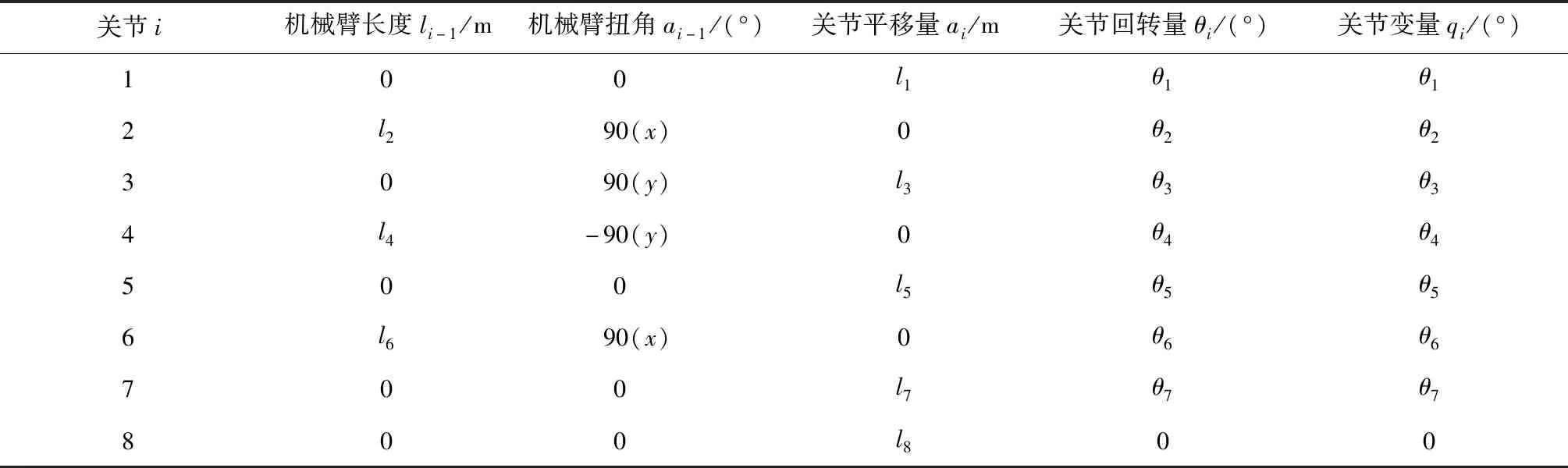
表1 机械臂几何和关节运动参数
(2)
机座至第1个关节的位姿矩阵M01是通过沿z0轴平移l1距离,再绕z1轴旋转θ1角旋转得到;第1个关节至第2个关节的位姿矩阵M12是通过沿z1轴平移l2距离后绕x1轴旋转90°角,再并绕z2轴旋转θ2角得到;第2个关节至第3个关节的位姿矩阵M23是通过绕y2轴旋转90°角,再平移l3距离并绕z3轴旋转θ3角得到;第3个关节至第4个关节的位姿矩阵M34是通过沿z3轴平移l4距离后绕y3轴旋转-90°角,再绕z4轴旋转θ4角得到;第4个关节至第5个关节的位姿矩阵M45是通过沿z4轴平移l5距离后并绕z5轴旋转θ5角得到;第5个关节至第6个关节的位姿矩阵M56是通过沿z5轴平移l6距离后绕x5轴旋转90°角,绕z6轴旋转θ6角得到;第6个关节至第7个关节的位姿矩阵M67是通过沿z6轴平移l7距离后并绕z7轴旋转θ7角得到;第7个关节至第8个关节的位姿矩阵M78是通过沿z7轴平移l8距离后得到。
七关节机械臂末端的位姿矩阵
M08=M01·M12·M23·M34·M45·M56·M67·M78
(3)
将式(2)与表1中的参数代入式(3)即可求解M08。
2 基于模型预测控制的轨迹规划跟随模型
模型预测控制是在每一个采样时刻,根据获得的当前测量信息结合参考路径轨迹,通过模型预测系统未来的输出,利用系统的预测输出和实际输出存在的偏差,对模型的预测结果进行修正,再通过某一性能指标在线求解一个有限时间的控制序列,并将控制序列的第1个元素作用于被控对象,在下一个采样时刻重复上述过程[8],如图3所示。

图3 模型预测控制

设机械臂的模型状态为
x=[q,v]
(4)
式(4)中,q为机械臂7个关节的角位移,v为7个关节的角速度。
设机械臂关节角加速度u为输入控制变量,则机械臂的动力学模型为

(5)
式(5)中,A,B,C为系数矩阵,分别为
其中,I7为7×7的单位矩阵,因此机械臂的模型状态有14个状态,7个输入和7个输出。
从第k-1,k到第k+1时刻,状态更新方程为
(6)
式(6)中,uact为实际的控制变量值;uopt为优化的控制变量值;xrev是当uact不等于uopt时的修正值;y(k)为输出值;e(k)为误差值;L,M为恒卡尔曼增益矩阵。
预测模型的输出更新方程为
(7)
式(7)中,i为预测步数。
其价值函数为
u′(t)Quu(t)dt+(pref-p(q(t)))′
(8)
式(8)中,pref为机械臂末端的期望位姿,p(q(t))为关节位置q(t)转换到机械臂末端的位置;Qr,Qu,Qt,Qv为恒重矩阵。
实际控制过程中,需要满足的约束条件为
di,j≥dsafe
(9)
式(9)中,di,j表示第i个机械臂到第j个阻碍物的距离,dsafe为机械臂到阻碍物的安全距离。
3 仿真验证
试验是在MATLAB 2020a软件环境下完成的。硬件环境中的CPU采用主频为2.4 GHz的英特尔酷睿四核i7-10750H处理器,显卡采用显存为4 GB的GTX1650Ti显卡,内存16 GB。
根据上述模型建立七关节机械臂仿真模型,并确定机械臂末端的空间起始点A和空间终止点B的位姿矩阵。
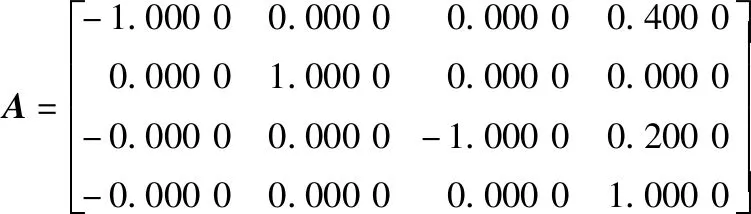

为了测试七关节机械臂的碰撞功能,在空间中设置2个球型阻碍物,如图4所示。

图4 机械臂空间始终点及阻碍物
根据空间起始点A和空间终止点B的位姿矩阵,使用MATLAB模型预测控制工具箱的nlmpcmoveopt对象设置模型预测控制器的参数,并利用nlmpcmove()函数通过迭代方式生成规划路径。为了避免机械臂碰撞到障碍物,每次迭代都会计算各关节的位置、速度和加速度,以及是否已达到目标。
机械臂在沿规划路径移动时,模型预测控制模型根据7个关节的状态(角位移、角速度)和输入控制量(角加速度)跟踪规划路径,如图5所示。
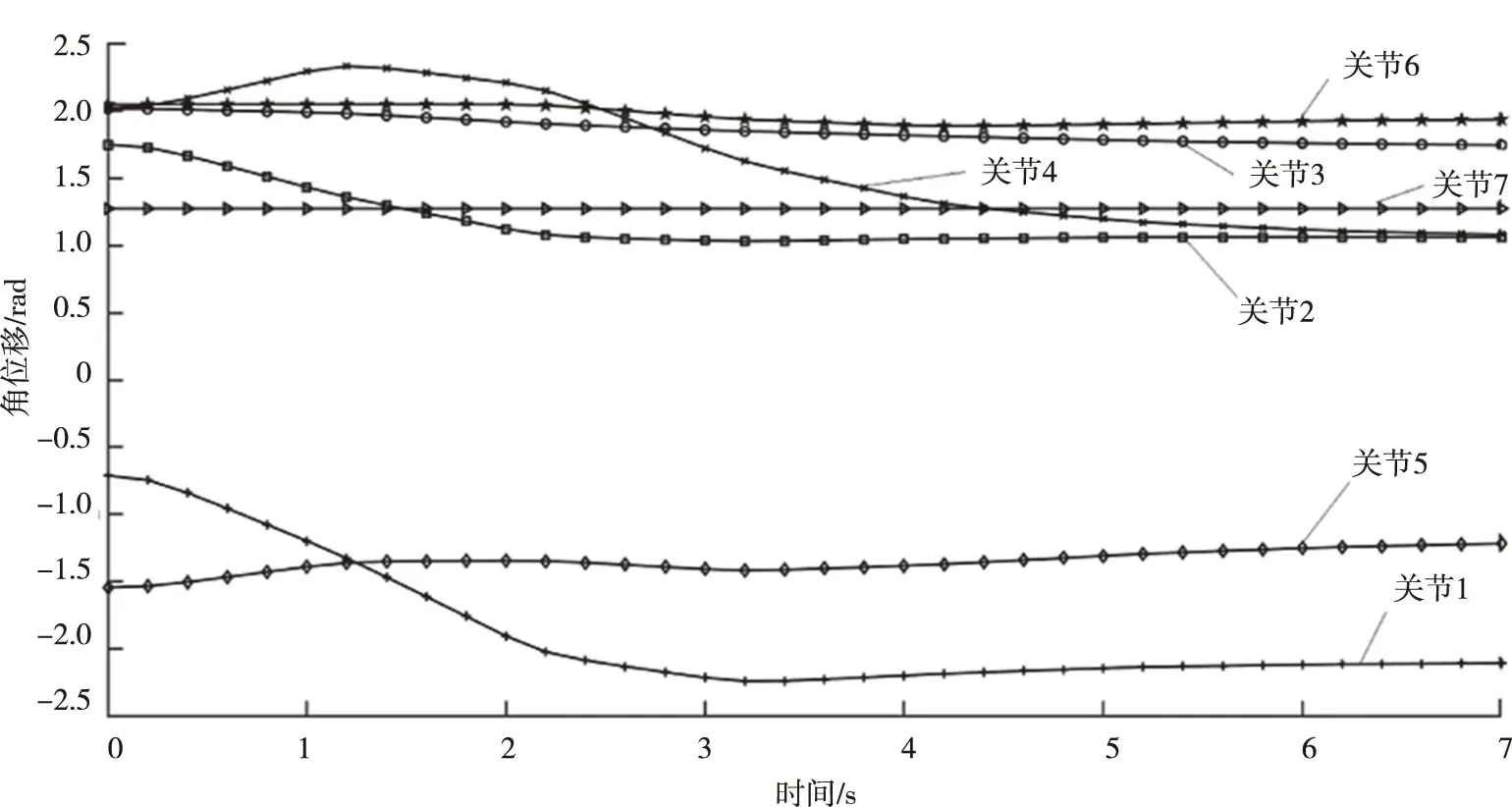
图5 机械臂各关节角位移
图5中,7个关节角位移曲线变化较为平缓,说明机械臂可以平稳地从初始位置到达终止位置,机械臂末端的定位精度为±0.02 m,主要原因是因为机械臂各关节在运行中会受到温度的影响,这是不可避免的,尽管有精度误差,但也进一步验证了结构设计的合理性。
机械臂各关节角速度如图6所示。
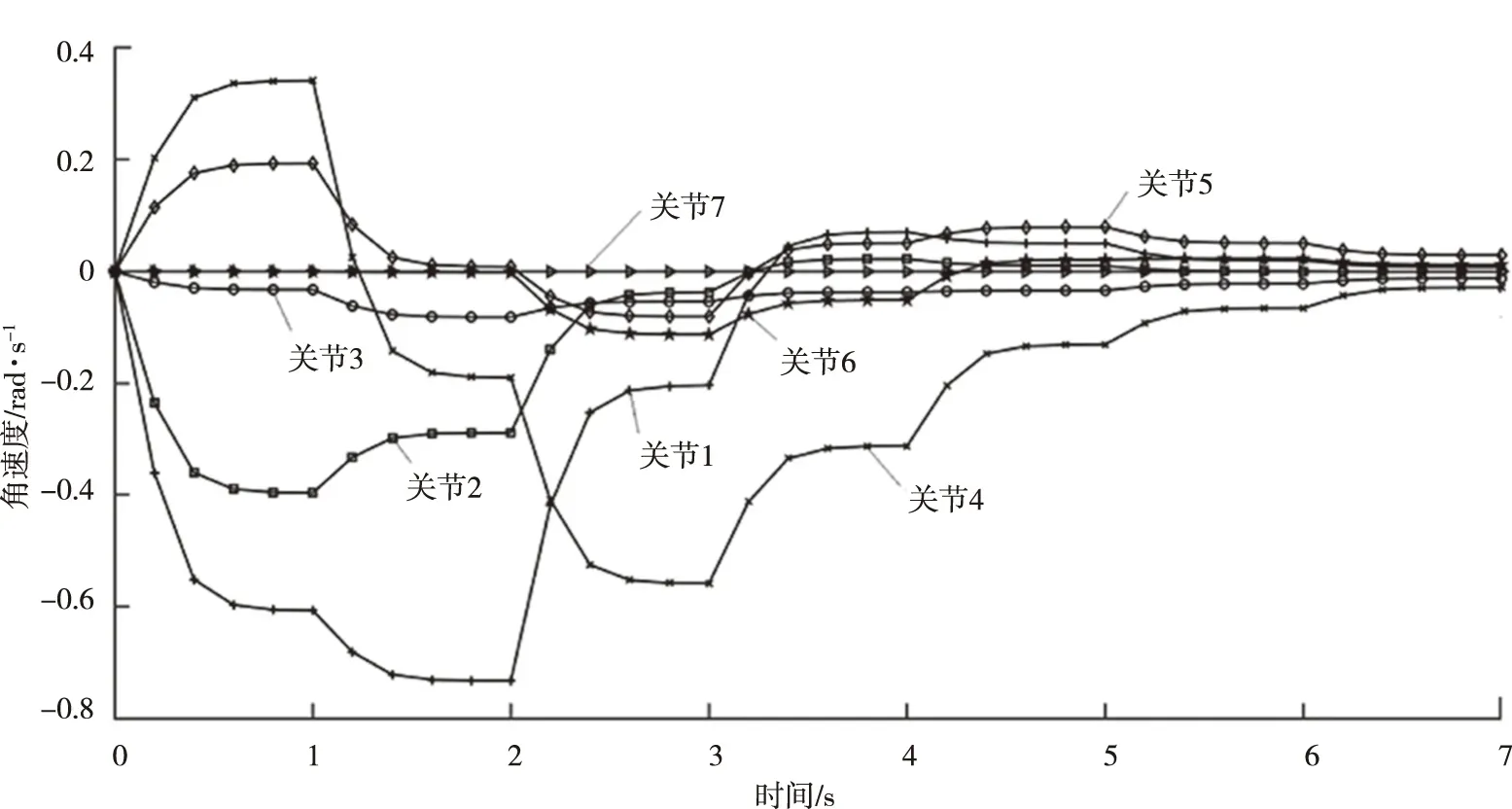
图6 机械臂各关节角速度
图6中,在0~1.2 s时,除了第7关节,其他各关节角速度曲线呈现加速趋势,2 s之后呈现减速趋势,并在第3 s之后平稳减速,直至速度降为0,说明机械臂在移动过程各关节的速度控制稳定,进一步验证了轨迹规划跟随模型的合理性。
机械臂各关节控制量(角加速度)的控制情况如图7所示。

(a)第1关节角加速度
从图7可以看出,在前3.4 s时,由于机械臂的运动轨迹与规划路径有误差,所以轨迹规划跟随模型需要为每个关节输出各自不同控制量(角加速度),第1、第5、第6关节以负方向控制角加速度,第2、第3、第4、第7关节以正方向控制角加速度,以缩小误差,直到第4 s,机械臂的运动轨迹与规划路径误差降为0,因此,各个关节输出的控制量也降为0,从而也间接影响了各关节的角速度变化,也进一步验证了模型预测控制模型的合理性。
同时,在机械臂运动过程,也始终与阻碍物保持0.1 m的安全距离,机械臂的运动轨迹与规划路径几乎一致,说明机械臂结构设计和轨迹规划跟随模型都得到有效的验证。
4 结论
本文运用雅可比矩阵法建立了七关节空间机械臂的连杆坐标系,并推导出机械臂的运动学方程,通过设置机械臂末端执行器的初始位姿、终止位姿和阻碍物,利用基于模型预测的控制模型控制机械臂运动,并通过MATLAB软件建模仿真,对机械臂进行轨迹规划控制,得到的各关节角位移、角速度、角加速度曲线,以及机械臂的运动轨迹。实验表明:机械臂可以避开阻碍物平缓地实现初始点到终止点的运动。验证了运动学方程的正确性和结构的合理性,基于模型预测的控制模型在机械臂控制运动的可行性;表明了该设计方案的可行性,从而为后续机械臂的相关研究提供了重要参考依据。
