风浪流荷载下基于AQWA的海上Spar型浮式基础稳定性分析
2022-05-19姚文娟
徐 旭,丁 刚,姚文娟
(上海大学 力学与工程科学学院,上海 200444)
1 研究背景
能源是国民经济及社会发展的重要物质基础,然而世界各国对于不可再生的化石能源的利用存在着诸多环境问题,提高对清洁、丰富而又可再生的风能资源利用受到世界各国的广泛关注。相比于近海风电场,深海区域的风能资源更为丰富,装机容量大且对沿海居民生活及工作影响小[1]。因此,对深海漂浮式风力发电机的研究已经成为未来风能利用的必然趋势[2]。其中Spar型浮式平台拥有着水线面积较小、吃水深、稳性好且便于安装和拖曳等众多特点,被世界各国应用于深海风力资源的利用[3-5]。
海上漂浮式风机的概念最早由麻省理工大学的Heronemus教授于1972年率先提出,但直到20世纪90年代,对海上风能的利用才相对成熟,逐渐开始了对海上浮式风机的相关研究。挪威国家石油公司与该国能源公司[6]共同合作于2009年在距离海岸线10 km并有着极端海况条件的挪威西海岸安装了世界上第一台支撑Siemens-2.3 MW风力机的Spar型浮式风机样机。Karimirad等[7-9]对NREL 5 MW Spar型风力发电机在极端海况环境下进行了气动-水-伺服弹性时域模拟,发现动态响应的平均值主要由风荷载诱导,响应的标准差主要由波浪荷载诱导。Roberston等[10]对驳船式、张力腿式以及Spar型3种海上浮式风机概念进行了综合动态响应分析,得出浮式系统可承受的极限载以及疲劳载,解决了浮式系统概念之间基本设计权衡。Meysam等[11-12]通过使用FAST及WAMIT软件获得频域下的气动及水动力特性,并提出了一种将风机、浮式平台和系泊系统模型耦合的频域建模新方法。Kopperstad等[13]对由驳船式平台以及Spar型平台支撑的柔性浮式海上风机尾流动力学进行了数值研究,并论证了在波浪诱导运动下,利用Spar概念的单个涡轮如何能够更节能。Ma等[14]针对OC3 Hywind Spar型浮式风机,评估了系统在不同海况下的运动和系泊力的响应特性,并讨论了风和波引起的荷载对系统的影响。叶舟等[15]通过改变OC3 Hywind Spar 型浮式平台模型在压舱部分压载物的类型,研究了压载物分别为混凝土和水时结构在纵荡和垂荡两个自由度上的动态响应情况。张大明等[16]利用OrcaFlex建立了一种 Spar 型海上风机简化模型,通过改变锚链上不同导缆孔的位置和布置形式,研究了在不同工况下系泊缆张力变化情况,为海上风机浮式基础系泊系统的设计及优化提供了依据。Yue等[17]基于OC3 Hywind Spar浮式平台和NREL5MW风机,采用水动力模块(AQWA)软件建立了耦合气动-水动力-系泊线系统模型,比较分析了Spar平台安装升沉板后与原始Spar平台在频域及时域下的动力响应。董璐等[18]基于非线性空气动力-水动力耦合时域算法对OC3 Hywind Spar型浮式风机在风浪流共同作用下的系泊系统疲劳响应特性展开研究,对系泊缆材质选择以及系泊系统的设计提出了合理化建议。黄小华等[19]针对一种半潜式桁架结构渔场平台开展了模型比尺为1∶30的波浪水池试验,研究了单点系泊系统改变系泊缆长度以及在距锚固点1/4处悬挂配重块对系泊缆张力的影响,为半潜式渔场平台的发展提供一定的理论参考。
目前对Spar型浮式平台以上的研究较多,但对其在不同工况下的稳定性情况以及在基础平台以下系泊系统对结构的运动响应的研究较少。本文针对设计出的OC3 Hywind Spar型浮式风机,利用AQWA软件建模,研究其在不同工况下各自由度的响应情况,比较分析了配重块在系泊缆上不同位置处对浮式结构稳定性的影响以及系泊力变化情况。
2 模型建立与计算
Spar型浮式基础是通过在平台压舱部分添加压载物使得平台的重心远低于浮心,为平台在纵摇、横摇自由度上提供回复力以及惯性力,使结构达到动态平衡的一种压载稳定式平台。本文中的模型结构是针对400 m水深条件下的OC3 Hywind Spar型浮式基础,研究其在恶劣环境下的稳定性,Spar型浮式基础模型示意图如图1所示。
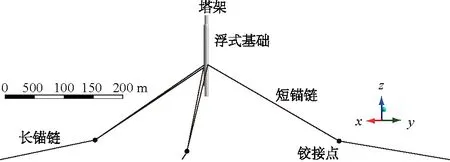
图1 Spar型浮式基础模型示意图Fig.1 Diagram of Spar floating foundation platform model
2.1 基础参数
海上浮式风机主要由风机、塔架、浮式平台、系泊系统4个部分组成,本文研究的主要对象为浮式平台部分,因此主要是针对浮式平台以及系泊系统2个部分的运动响应问题进行研究。Spar型平台拥有较小的水线面和较大的排水量等特点,能够提供结构所需的惯性力及回复力。本文设计的基础平台由3部分组成,分别为直径6.5 m、长度14 m的上端圆柱,连接上端圆柱和下端圆柱的线性过渡段,直径9.4 m、高度108 m的下端圆柱。平台的详细参数如表1所示,Spar型浮式基础平面示意图如图2所示。
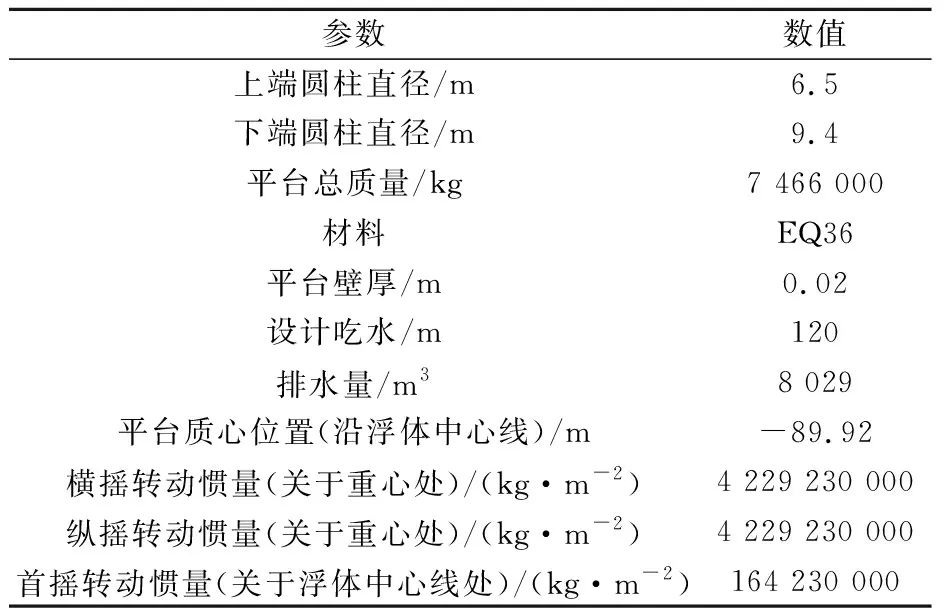
表1 浮式基础几何参数Table 1 Geometry parameters of the floatingfoundation platform
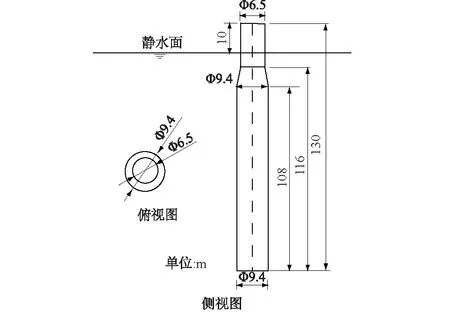
图2 Spar型浮式基础平面示意图Fig.2 Plane diagram of Spar floating foundation platform
2.2 系泊系统参数
系泊系统是连接浮式基础与海床的重要结构,通过锚链提供的回复力以及回复力矩对浮式结构物进行定位。本文采用Koo等[20]提出的delta connection的锚链连接方式,该种系泊方式能够有效限制浮式基础在首摇自由度方向的位移,包含了3根相互成120°的长锚链以及6根短锚链。首先通过计算确定平台3个导缆孔位置(connection point)、3个锚固点(Fixed point)以及3个铰接点(connection point)位置坐标;其次在AQWA Workbench界面里的Hydrodynamic Response模块中的catenary属性中选择缆绳连结方式为connection point-connection point,将导缆孔与铰接点连接完成6根短锚链的布置;最后选择缆绳连结方式为Fixed point-connection point, 将铰接点与锚固点连接完成3根长锚链的布置如图3所示,详细参数见表2。
图3 系泊系统连接方式Fig.3 Connection of mooring system
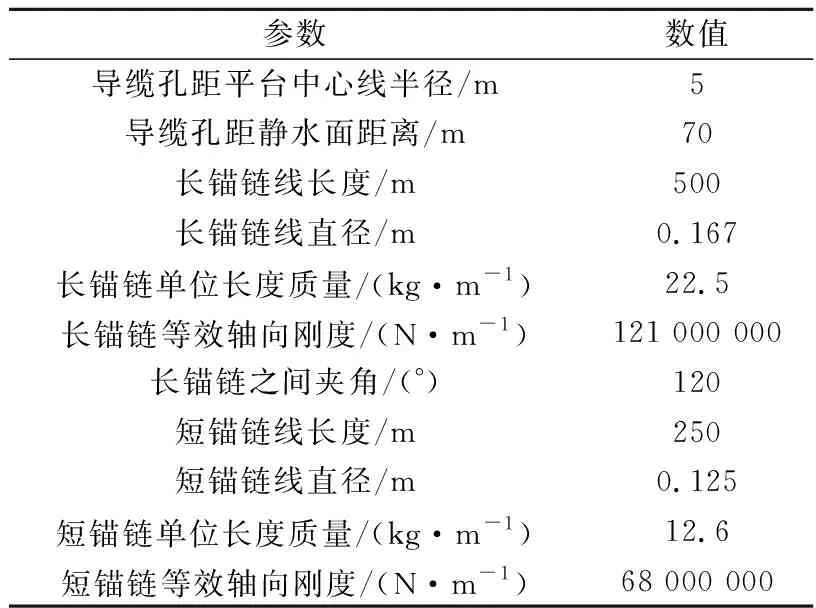
表2 系泊系统参数Table 2 Parameters of mooring system
由于悬链线锚入海床的方式对系泊系统的稳定性有着一定影响,故采用李英等[21]针对海底管道运输时所采用的悬链线中间段安装单向锚的方式对系泊系统进行锚固,如图4所示。
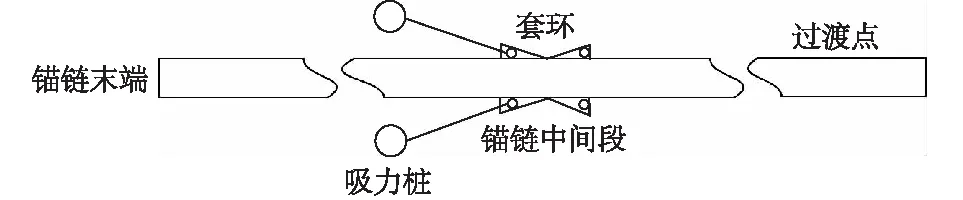
图4 系泊系统锚固方式Fig.4 Anchorage pattern of mooring system
2.3 海上浮式基础运动控制方程
使用ANSYS中的AQWA对浮式基础所受荷载参数进行设置,包含风荷载、波浪荷载、海流荷载以及系泊荷载等。在海洋环境中风对浮式风机的主要作用形式为气动弹性荷载和风压荷载,他们分别作用在风机叶片及水面以上的风机塔架和平台基础上。鉴于本文研究的是浮式基础,故只考虑水面以上10 m处风压荷载对塔及基础平台的影响。通过AQWA Workbench界面中的Hydrodynamic Response模块对各个环境参数进行定义,其中风荷载参数采用API风谱定义,波浪荷载参数采用JONSWAP(Hs)波浪谱定义,海流荷载则根据水深的不同来设置水流流速以得到流场环境来进行定义,系泊荷载的计算采用考虑惯性力和阻力的有限元模型,将系泊缆视为弹性杆模型,建立浮式基础与系泊缆耦合的非线性时域运动控制方程,即
Faero+Fhyd+Fcurr+Fmoor。
(1)

2.4 系泊荷载计算
在实际情况中,系泊缆的弹性影响是不可忽略的,本文将系泊缆假设成连续性的弹性介质,通过有限元的方法将系泊缆分成n段,每段系泊缆可近似表示为直线,n越大,计算精确度也更高,离散化的有限元方程为
(2)
惯性力矢量为
(3)
式中:M(x)为系统质量矩阵;MS(x)表示结构质量矩阵;MF(x)表示结构内部流体质量矩阵;MH表示结构加速度水动力质量矩阵,也作为局部坐标系中附加质量的一部分。
阻尼力矢量为
(4)
式中:C(x)为系统的阻尼矩阵;CS(x)为结构阻尼矩阵;CH(x)为考虑了绕射效应的水动力阻尼矩阵;CD为与位移相关的特定离散阻尼矩阵。
3 不同工况下平台的浮式基础动力响应分析
3.1 静水自由衰减
本文着重研究浮式基础平台的响应分析,因此将坐标系定义在平台导缆孔处,如图5所示,包含6个方向的自由度。由于风浪荷载主要作用于y方向,故x方向所受荷载较小,基础平台横荡及横摇方向的响应值较其他自由度方向较低,所以本文主要研究基础平台在垂荡、纵荡、首摇和纵摇4个方向的运动响应情况。通过自由衰减试验确定浮式平台基础的固有周期,纵荡、纵摇、垂荡和首摇自由度方向的自由衰减结果如表3所示。
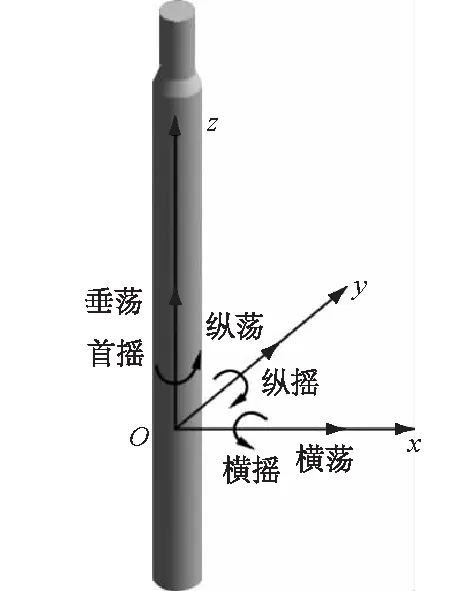
图5 坐标系定义Fig.5 Definition of coordinate system

表3 浮式基础平台各自由度处的固有周期Table 3 Natural period at each degree of freedom of floating foundation platform
3.2 环境工况
为了研究在不同工况下浮式基础各个自由度下的运动响应值,定义了7种类型的工况,包含3种荷载作用类型,即单独风荷载作用、单独波浪荷载作用(不规则波)和风荷载+波浪荷载(不规则波)联合作用。具体参数如表4所示。
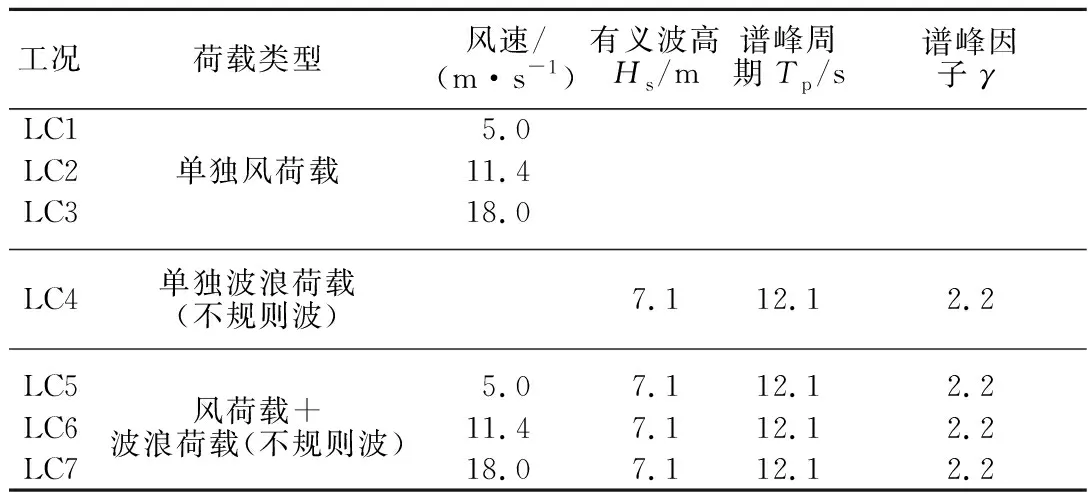
表4 不同工况下的参数定义Table 4 Parameter definitions in different cases
3.3 浮式基础平台的动力响应
使用ANSYS软件中的AQWA进行非线性时域模拟。在软件中定义环境参数,其中风谱采用API风谱,波浪谱采用JONSWAP谱,浪向角为30°,并根据水深的不同来设置水流流速得到流场环境,最终得出平台在不同工况下的运动响应值。表5给出浮式基础结构在垂荡、纵荡、首摇及纵摇自由度方向上的响应极值。图6给出平台在受单独风荷载作用下以及受风浪荷载共同作用下各自由度方向上响应极值的变化情况。对比图6(a)、图6(b)可知浮式基础平台在纵摇自由度方向上的运动响应极值主要由风荷载控制,随风速增大,响应幅值也随之增大,而风速的改变对平台垂荡方向上的位移影响较小。
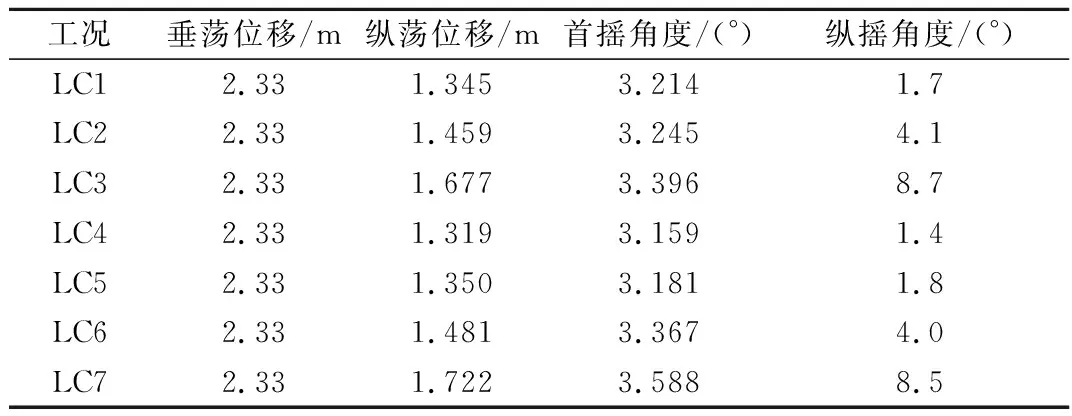
表5 不同工况下浮式基础各自由度的响应极值Table 5 Extreme motion response values of each degree of freedom in different cases
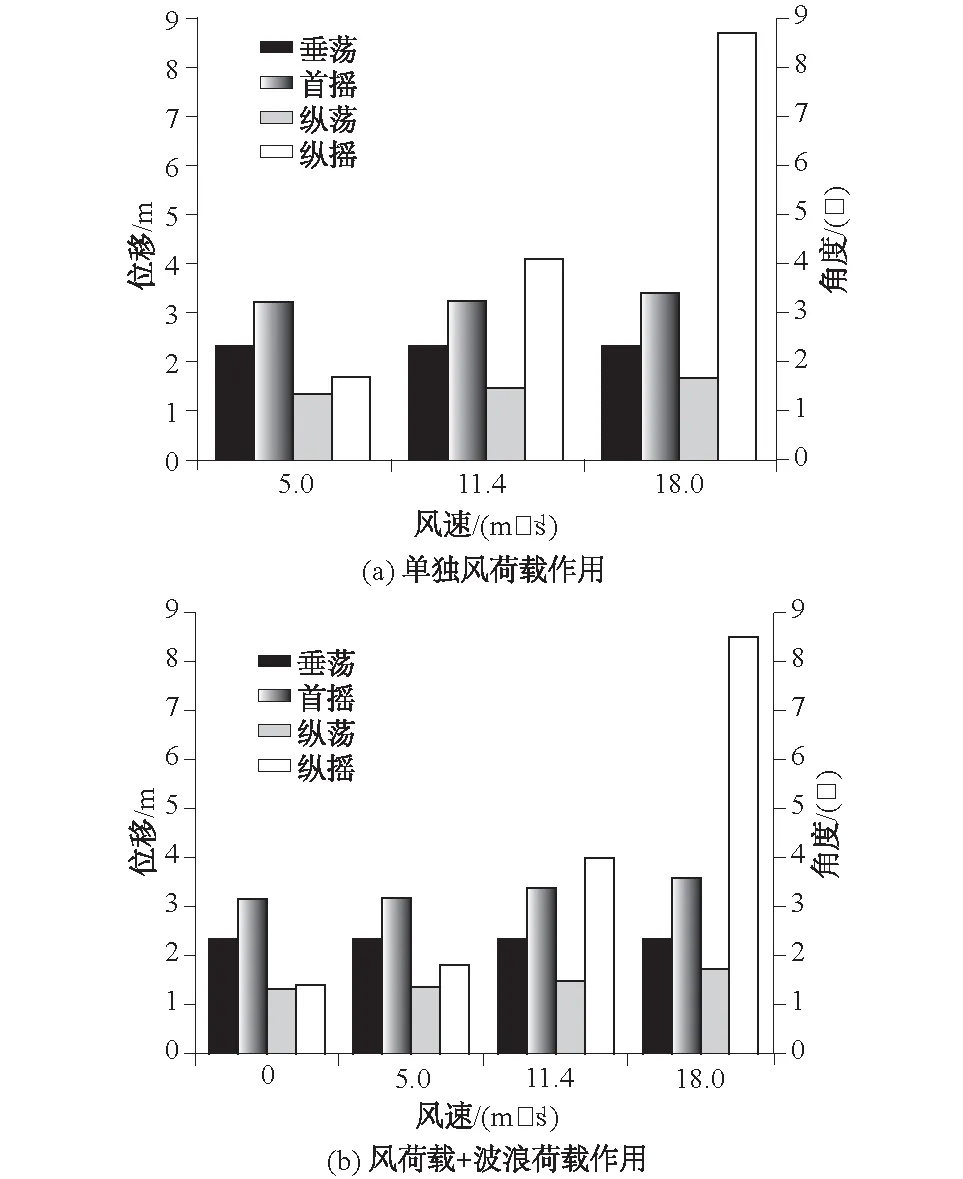
图6 平台受单独风荷载和风荷载+波浪荷载作用下各自由度的响应极值Fig.6 Extreme response values of each degree of freedom of the platform under single wind load and both wind and wave loads
4 配重块在系泊不同位置处对浮式基础平台稳定性的影响研究
系泊缆在实际情况下是具有弹性的,通过在锚链上悬挂重物可以有效增加系泊系统的弹性,使结构在受到波浪荷载作用下能起到一定的缓冲作用。本文通过将配重块悬挂在系泊缆不同位置研究其对浮式基础平台稳定性的影响,如图7所示。在delta-connection 的系泊联结基础上,将Catenary joint属性设置为Catenary clump weight,并定义clump weigh的质量及力学特性即可模拟配重块;最后通过在系泊缆上悬挂配重块可将其分为3段形成折线型系泊系统[22],模型如图8所示。其中配重块质量为3 405.6 kg,为直径1.67 m的球形实体,由于配重块主要悬挂于深海,海水流速较小,对于配重块的作用可忽略不计,因此本文配重块的体积变化对Spar型浮式基础平台的水平动力特性影响较小。由于是在系泊缆上通过吊环悬挂配重块并且为长期作用,对吊环的疲劳承载可通过对吊环小环水平部位内侧进行加宽,使其截面成为椭圆,以改善应力集中的情况,从而延长使用寿命[23]。
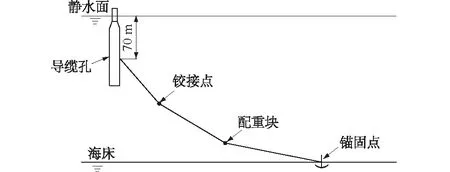
图7 三折线系泊系统示意图Fig.7 Schematic diagram of tri-fold line mooring system

图8 三折线系泊系统模型Fig.8 Model diagram of tri-fold line mooring system
4.1 频域动态响应
RAOs又叫幅值响应算子,是表征浮式结构在受到外界荷载作用后各自由度方向上位移的衡量单位,表征浮式基础平台稳定性的一个重要参数。图9为将配重块悬挂在距锚固点500、400、300、200、100 m处基础平台不同自由度下的随频率变化的运动响应RAOs。
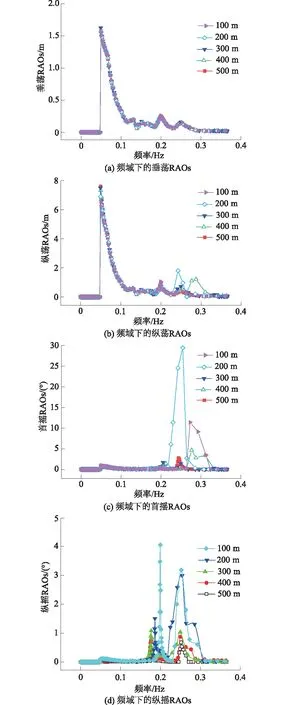
图9 频域下各自由度的响应极值Fig.9 RAOs of each degree of freedom in the frequency domain
根据图9中的(a)、(b)可以发现,垂荡和纵荡2个自由度方向上的 RAOs 最大值出现的频率分别对应着各自自由度的固有周期,并且响应值不随配重块的位置改变而改变,由此表明配重块在不同位置处对结构纵荡和垂荡运动的影响较小,并且均在固有频率处产生了共振,具有较为明显的耦合作用。
由图9中的(c)、(d)可以看出,浮式基础平台在首摇和纵摇2个自由度方向的 RAOs 最大值所出现的频率分别对应于垂荡、纵摇和首摇自由度固有周期,并且随着配重块距离锚固点越近,结构首摇和纵摇运动响应值越大,而在对应首摇自由度固有周期处,随着配重块距离锚固点越近,首摇运动的响应值越小,纵摇运动的响应值越大,说明通过改变配重块悬挂位置,会使结构在垂荡、纵摇和首摇运动之间的耦合作用较为明显,尤其对结构的偏转有着显著影响,并且影响浮式平台的响应极值大小,悬挂点距离锚固点越近,越不利于平台的稳定。
4.2 时域动态响应
频域分析主要是为了研究基础平台在不同波频荷载作用下的运动响应的变化情况,一般是针对结构的稳态问题,对于瞬态问题以及强非线性问题需采取时域分析。本文在考虑基础平台所受的风、浪、流等环境荷载共同作用以及各自由度相互耦合时,需要采用非线性时域模拟进行分析。
图10为基础平台在配重块悬挂在系泊缆不同位置处各自由度的运动响应值随时间的变化情况。从图10可以看出,基础平台在垂荡、纵荡、首摇和纵摇方向上均作非周期往复运动。在纵荡方向上,改变配重块悬挂位置,运动响应值的变化情况相比于垂荡运动波动较小,峰值随配重块距离锚固点距离缩减而逐渐增大,并随时间推移最终趋向于一个定值。对于首摇运动,响应幅值的变化整体趋势与纵荡自由度方向类似,均为达到峰值后在一个区间内波动,并且来回往复波动的频率较快,说明结构在首摇及纵荡运动之间的耦合作用较为明显。在垂荡方向上,随着配重块距离锚固点越来越近,运动响应值逐渐减小,峰值随时间推移呈现递减趋势,且收敛速度小于首摇及纵荡运动。在纵摇方向上,改变配重块的位置,对基础平台的运动响应幅值影响较小。由此可知在不达到平台首摇和纵荡临界响应值的前提下,将配重块悬挂在越靠近锚固点的位置,越有利于浮式基础平台应对外来环境荷载。
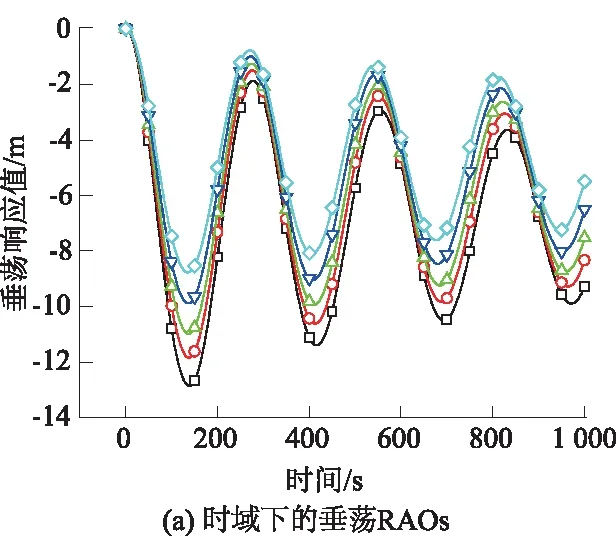
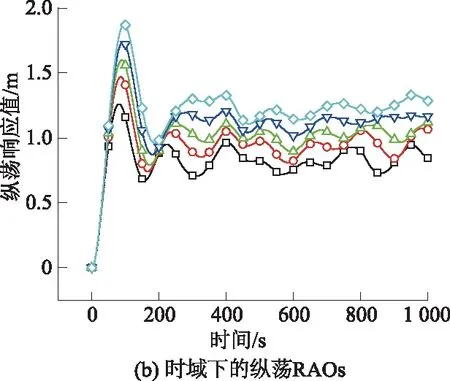
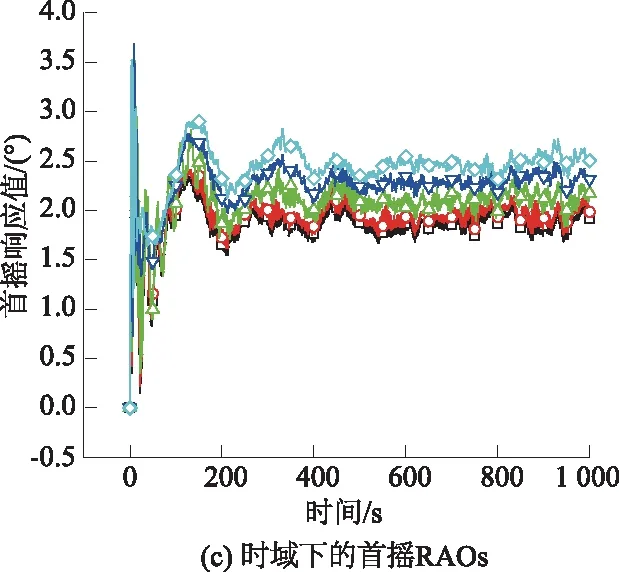

图10 时域下各自由度的响应极值Fig.10 RAOs of each degree of freedom in the time domain
4.3 系泊力
改变配重块的位置得出系泊力随时间的变化情况,如图11所示。由图11可见,系泊力在初始位置达到最大值,随后逐渐衰减,呈周期性变化。受外部荷载作用时,未悬挂配重块的系泊系统张力要高于悬挂了配重块的系泊系统张力,说明在系泊缆上悬挂配重块分成3段形成的折线型系泊系统能有效增加系泊缆的弹性,起到一定的缓冲作用,从而降低系泊缆受力,且加了配重块的系泊系统随着配重块悬挂位置离锚固点越远,系泊力峰值越小。
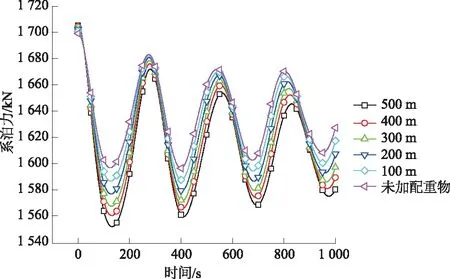
图11 配重块距锚固点不同位置处的系泊力历时曲线Fig.11 Time histories of mooring force when counterweight was suspended at different distances to anchor point
5 结 论
通过对Spar型浮式基础平台结构在不同工况下各个自由度下的运动响应特性进行研究,比较分析了配重块悬挂在系泊缆不同位置处对浮式基础平台稳定性以及系泊缆张力的影响情况,得出如下几点结论。
(1)浮式基础平台在7种不同工况荷载作用下的响应极值均未达到临界值,其中在纵摇自由度方向上的运动响应极值主要受风荷载影响,随着风速增大,响应幅值也随之增大,而风速的改变对平台垂荡方向上的位移影响较小。波浪荷载对结构4个自由度方向上的运动响应极值有一定影响,但不如风荷载明显。说明风荷载是影响浮式基础平台稳定性的主要因素之一。
(2)在同样的外部荷载作用下,浮式基础平台在垂荡和纵荡运动的RAOs不随配重块悬挂位置的改变而变化,在首摇和纵摇自由度方向上,随着配重块距离锚固点越来越近,对应于垂荡及纵摇的固有周期处的响应值呈现明显的上升趋势。可见改变配重块在系泊缆上的悬挂位置对结构的偏转有着显著影响,并且随着配重块距离锚固点越近,响应值越大,越不利于基础平台的稳定。
(3)在同样的外部荷载作用下,配重块悬挂在不同位置处的浮式基础平台在4个自由度处的RAOs随时间变化的趋势基本近似,其中首摇及纵荡运动之间出现较为明显的耦合作用,响应峰值均为随配重块距离锚固点距离缩减而逐渐增大,并随时间推移最终在一个区间内波动。对于垂荡运动,随着配重块离锚固点越来越近,运动响应峰值逐渐减小,且随时间推移呈现递减趋势。由此可知在不达到平台首摇和纵荡临界响应值的前提下,将配重块悬挂在越靠近锚固点的位置,越有利于浮式基础平台应对外来环境荷载。
(4)在相同海况条件下,系泊力在初始位置达到最大值,随后逐渐衰减,呈周期性变化,受外部荷载作用时,未悬挂配重块的系泊系统张力要高于悬挂了配重块的系泊系统,说明在系泊缆上悬挂配重块分成3段形成的折线型系泊系统能有效增加系泊缆的弹性,起到一定的缓冲作用,从而降低系泊缆受力,并且加了配重块的系泊系统随着配重块悬挂位置离锚固点越远,系泊力峰值越小,越能保证浮式基础平台在恶劣海况条件下的生存能力。
