半潜浮式风机的动力响应分析
2022-08-09张培智
张培智
(江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003)
0 引 言
当今海上风电已成为新能源中较具开发条件和较有发展前景的发电方式,半潜浮式风机因其适用于深海、综合性能佳等优点已逐渐成为海洋工程界研究的热点。美国国家可再生能源实验室(NREL)研发的三浮筒半潜风机OC4-DeepCwind和葡萄牙WindFloat半潜风机项目因各自的浮式基础型式特点被人所熟知。对于半潜浮式风机来说,浮式基础的型式是较为重要的。
文献[1]~文献[3]基于势流理论研究仅考虑波浪载荷情况下的WindFloat三立柱无中心立柱式浮式风机基础的水动力性能。文献[4]和文献[5]基于叶素理论与势流理论对有中心立柱的三立柱式OC4和WindFloat风机浮式基础进行在风载荷和波浪载荷线性叠加下的时域运动响应分析。文献[6]和文献[7]基于水动力-空气动力-系泊系统的耦合对浮式风机的动力响应进行研究。但目前还比较缺乏半潜浮式风机在不同浮式基础结构型式下的全耦合动态响应分析。因此,结合OC4和WindFloat半潜浮式风机的基础结构型式,设计一种拥有新型半潜浮式风机基础型式的浮式风机OC4-WindFloat,并对其进行水动力全耦合分析。
1 海洋环境载荷及半潜浮式风机运动理论
1.1 风载荷
目前,对于风机叶片所受风载荷的计算主要使用叶素-动量理论[8]进行考虑。叶素理论将叶轮假想为可沿其展向分成无限个互相独立的微段,并且在每个微段上的流体运动互不干扰。此时叶素被近似为二元翼型,而叶轮所受推力及转矩可通过对叶素所受外力和转矩在其展向积分得到。在每个叶素上的轴向推力和转矩分别为
dT=CnNbcdrρ1W2/2
(1)
dM=CtNbcrdrρ1W2/2
(2)
式(1)和式(2)中:Cn为法向力系数;Nb为叶片数量;c为叶素弦长;r为任意一点与轮毂之间的距离;ρ1为空气密度;W为叶素相对风速矢量的大小;Ct为切向力系数。对上式沿轴向积分可得到作用在整个叶轮上的推力T和转矩M。
1.2 半潜浮式风机波浪载荷
半潜浮式风机基础的各个立柱由细长结构的横撑互相连接,使用HydroD模块基于水动力理论对风机基础进行频域水动力计算,对各个立柱使用势流理论计算其波浪载荷,而各个细长杆件横撑则采用莫里森公式计算其波浪载荷。莫里森公式将波浪载荷描述为波浪流体加速度产生的惯性力和黏性产生的摩擦力之和,其具体方程的微分形式如下:

(3)

对于浮式基础的各浮筒波浪载荷,使用多体水动力势流理论将每个浮筒视作单独的浮体进行波浪扰动力和辐射力的计算。除上述载荷外,浮筒还受到波浪和海流的黏性拖曳力作用,这一部分受力使用莫里森公式中对于黏性力的计算方法进行表达:
(4)

1.3 半潜浮式风机运动理论
海上浮式风机在风浪作用下的运动方程如下:
(5)

2 OC4-WindFloat半潜浮式风机结构
OC4半潜浮式风机结构[9-10][见图1(a)]和WindFloat半潜浮式风机结构[11][见图1(b)]均由顶部风机、塔架、浮式基础和系泊系统组成。OC4半潜浮式风机基础是四立柱浮式结构,顶部风机安装在中心立柱上;而WindFloat半潜浮式风机基础是三立柱浮式基础结构,顶部风机安装在边立柱上。WindFloat和OC4半潜浮式风机都各有优缺点:WindFloat半潜浮式风机基础的垂荡板结构比OC4减摇效果更好,但设计水深不到100 m,不适合深海区域;WindFloat半潜浮式风机只适合葡萄牙地区,依据当地安装地点风向特点,多为往复型而不是360°,三立柱式最不利工况在90°方向,此时通过压载水调节,可将风机控制在10°以内,该基础型式在布置方向上有一定要求;OC4半潜浮式风机基础排水量大、吃水深,基础型式复杂且建造成本高,压载水调节比WindFloat更麻烦一些。
设计一种拥有新型半潜浮式风机基础型式的浮式风机OC4-WindFloat[见图1(c)]。新型OC4-WindFloat半潜浮式风机采用与OC4半潜浮式风机相同的顶部风机、相近的设计吃水及排水量,而浮式基础型式参考WindFloat半潜浮式风机。与WindFloat相比有更深的设计吃水,综合适应性能比WindFloat要好;与OC4相比,基础型式的改变使制造成本比OC4半潜浮式风机要低。OC4、WindFloat和OC4-WindFloat半潜浮式风机结构主参数如表1所示。

图1 3种半潜式浮式风机结构示例

表1 OC4、WindFloat和OC4-WindFloat半潜浮式风机结构主参数
3 风浪耦合响应下的半潜浮式风机水动力性能数值模拟分析
为合理研究OC4-WindFloat半潜浮式风机的水动力性能,对OC4半潜浮式风机进行基于风浪耦合响应的频域水动力和数值模拟分析,将固有周期计算结果与文献[10]中的试验数据进行对比研究,在数值模拟与试验结果相一致的基础上,进行基于风浪耦合下的OC4半潜浮式风机时域动态响应计算分析,以相同求解方法求解OC4-WindFloat半潜浮式风机的固有周期及动态响应计算结果。
3.1 OC4半潜浮式风机频域水动力数值分析
3.1.1 OC4半潜浮式风机水动力有限元模型
OC4半潜浮式风机设计水深为 200 m,海水密度为1.025×103kg/m3,吃水为20 m,排水量约13 500 t。采用挪威船级社(DNV)的船舶与海洋工程软件SESAM建立OC4半潜浮式风机基础的水动力模型,如图2(a)所示。湿表面模型和莫里森模型网格大小为2 m,共有2 401 个节点和 2 395个单元,如图2(b)和图2(c)所示。

图2 OC4半潜浮式风机水动力有限元模型
3.1.2 OC4半潜浮式风机运动响应
通过计算得到OC4半潜浮式风机在0°~180°(步长为30°)浪向角下,0.1~2.5 rad/s(间隔0.1 rad/s)频率范围内的纵荡、横荡、垂荡、横摇、纵摇和艏摇,即沿x、y和z轴方向的移动和绕这3个坐标轴转动的运动响应值结果,如图3所示,其中:RAO(Response Amplitude Operator)为响应幅值算子。

图3 OC4浮式半潜风机运动响应
由图3可得:
(1)纵荡和横荡运动响应振幅随波浪频率的增大逐渐减小。垂荡运动响应随波浪频率的增大,先增大后减小,垂荡方向的波浪频率敏感区间为0.2~0.4 rad/s,极值点的波浪频率为0.3 rad/s。
(2)横摇和纵摇运动响应值曲线趋势相似,先减小后增大再减小,波浪频率敏感区间为0.5 ~1.0 rad/s。艏摇方向波浪频率敏感区间为0.7~1.3 rad/s,极值点的波浪频率为1.0 rad/s。
3.2 风浪耦合响应下的OC4半潜浮式风机时域动态响应分析
为了对设计的OC4-WindFolat半潜浮式风机进行较为合理的水动力性能分析,对OC4半潜浮式风机固有周期及六自由度运动响应进行数值模拟研究,并与文献[10]中的试验和数值模拟结果进行对比分析。
3.2.1 OC4半潜浮式风机固有周期数值模拟分析
通过计算,OC4半潜浮式风机在六自由度方向的固有周期及与文献[10]中的试验结果如表2所示。由表2可知:计算结果与文献[10]中的试验结果误差百分比约5%,因此,半潜浮式风机的固有周期数值模拟方法是合理的。
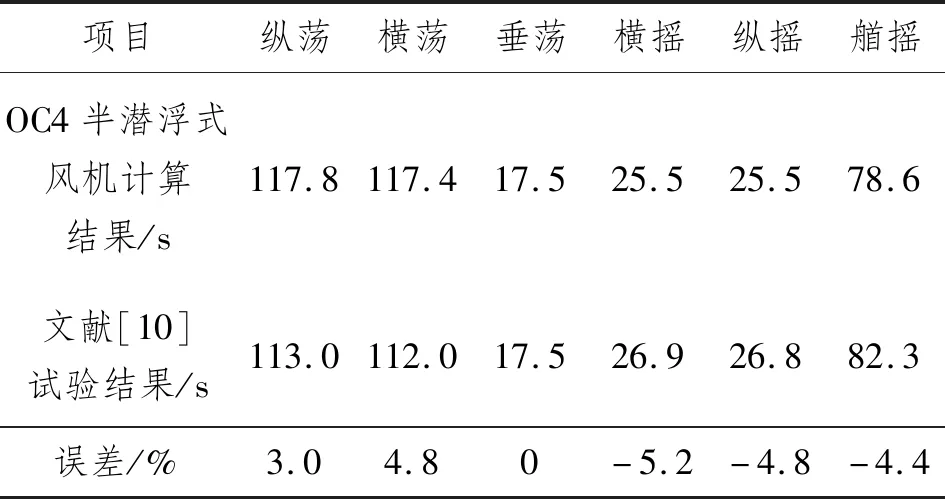
表2 OC4半潜浮式风机固有周期计算结果与文献[10]中的试验结果对比
3.2.2 OC4半潜浮式风机时域动态响应分析
由于OC4半潜浮式风机的设计水深为200 m,因此适用于我国南海海域。根据南海海域海洋气象资料[12]和海洋环境条件DNV-ST-0437[13],风谱采用美国石油协会(API)风谱,拟定极端工况平均风速为25.0 m/s,运行工况平均风速为11.4 m/s。波浪谱采用JONSWAP谱,拟定极端工况波高为10 m,谱峰周期为6 s;运行工况波高为3 m,谱峰周期为10 s。OC4半潜浮式风机在南海海域时的极端工况和运行工况如表3所示。

表3 OC4半潜浮式风机在南海海域的部分设计工况
OC4半潜浮式风机会受到风机载荷和随机波浪载荷的共同作用,所以基于SIMO和RIFLEX对半潜浮式风机整体系统进行耦合动力响应计算。分析的时间总长为1 800 s,时间步长为0.02 s,风浪方向同向,沿x轴(0°方向)正对顶部风机。六自由度的运动响应在极端工况和运行工况条件下的结果如表4和表5所示。

表4 OC4半潜浮式风机极端工况六自由度运动响应

表5 OC4半潜浮式风机运行工况六自由度运动响应
根据相关规定,浮式平台的横纵荡运动位移一般不超过水深的5%~6%,垂荡运动幅值不超过±(2.0~3.0)m,由于浮式风机平台上无人居住,因此对其水平和垂荡运动的要求可适当放宽。OC4半潜浮式风机设计水深为200 m,因此横纵荡运动一般不超过10~12 m[14]。浮式风机在正常发电情况下,纵摇运动均值(平均俯仰角)需在±5°内,而最大值(动态俯仰角)需在±15°内[15]。
由表4和表5可知:OC4半潜浮式风机的横荡、垂荡、横摇和艏摇运动响应较小,而纵荡和纵摇运动响应较为明显;在极端和运行工况条件下,纵荡运动最大值分别为9.510 m和8.120 m,垂荡运动的最大值分别为0.863 m和0.492 m;在运行工况条件下,纵摇运动均值(平均俯仰角)为2.803°,而最大值(动态俯仰角)为4.985°。因此,OC4半潜浮式风机相关运动响应满足要求。
3.3 风浪耦合响应下的OC4-WindFloat半潜浮式风机时域动态响应分析
3.3.1 OC4-WindFloat半潜浮式风机固有周期数值模拟分析
通过计算,OC4-WindFloat半潜浮式风机在六自由度方向下的固有周期计算结果如表6所示。

表6 OC4-WindFloat半潜浮式风机固有周期计算结果 s
3.3.2 OC4-WindFloat半潜浮式风机时域动态响应分析
对OC4-WindFloat半潜浮式风机进行在极端和运行工况条件下的时域动态响应分析,设计工况如表4所示,六自由度的运动响应在两种工况条件下的结果如表7和表8所示。

表7 OC4-WindFloat半潜浮式风机极端工况六自由度运动响应

表8 OC4-WindFloat半潜浮式风机运行工况六自由度运动响应
由表7和表8可知:OC4-WindFloat半潜浮式风机的横荡、垂荡、横摇和艏摇运动响应较小,而纵荡和纵摇运动响应较为明显;在极端和运行工况条件下,纵荡运动最大值分别为10.272 m和9.060 m,垂荡运动最大值分别为1.325 m和0.804 m;在运行工况条件下,纵摇运动均值(平均俯仰角)为3.382°,最大值(动态俯仰角)为6.292°。根据文献[14]和[15],OC4-WindFloat半潜浮式风机运动响应满足相关要求。
4 OC4-WindFloat与OC4固有周期及动态响应对比分析
4.1 固有周期
OC4-WindFloat与OC4半潜浮式风机固有周期如图4所示。由图4可知:OC4-WindFloat与OC4半潜浮式风机的纵荡、横荡和艏摇固有周期比较接近,这是因为2个浮式风机基础型式虽有所不同,但采用的系泊系统较为一致,而纵荡、横荡和艏摇的恢复力主要由系泊系统提供;横摇、纵摇和垂荡固有周期有差异的原因是浮式基础的型式不同。
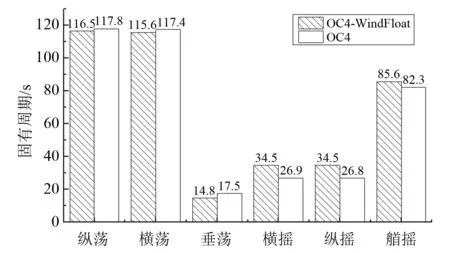
图4 OC4-WindFloat和OC4半潜浮式风机固有周期对比分析
4.2 动态响应
OC4-WindFloat与OC4半潜浮式风机最大位移动态响应如图5和图6所示。由图 5和图6可知:对于极端工况和运行工况,在纵荡、横荡和艏摇方向上OC4-WindFloat和OC4半潜浮式风机位移响应幅值比较相近,这是因为2个风机采用相同系泊系统,而系泊结构物的低频运动响应很大程度上受到系泊系统刚度和阻尼的影响;对于极端工况和运行工况,横摇、纵摇和垂荡3个方向的运动响应幅值有一定差值,一是由于浮式基础型式差异引起静水回复刚度与黏性阻尼的差异,二是由于不同浮式风机基础受到波频力、平均漂移力和缓变漂移力等高阶力的作用不同。

图5 OC4-WindFloat和OC4半潜浮式风机极端工况最大位移响应

图6 OC4-WindFloat和OC4半潜浮式风机运行工况最大位移响应
5 结 论
对OC4-WindFloat半潜浮式风机的基础结构型式进行设计,对其固有周期及动态响应进行数值模拟分析,并与文献中的OC4半潜浮式风机进行结果对比研究,得到如下结论:
(1) OC4-WindFloat半潜浮式风机结构结合OC4与WindFloat 半潜浮式风机基础型式的特点,由于基础借鉴WindFloat半潜浮式风机,没有中心立柱,与OC4相比建造成本低;由于其沿用OC4基础浮筒型式,因此其适用水深比WindFloat更佳。
(2)OC4-WindFloat与OC4半潜浮式风机纵横荡和艏摇固有周期及位移动态响应相接近,而纵横摇和垂荡固有周期及位移动态响应有差异,这主要是由于相同的系泊系统、不同的基础结构型式及上部风机安装位置不同所造成。