综掘巷道架管机三节臂的轨迹分析与优化
2022-05-19王小龙洪东炳贾志军朱鹏坤
王小龙,洪东炳,贾志军,2,朱鹏坤
1安徽理工大学机械工程学院 安徽淮南 232001 2安徽省智能矿山装备与技术工程实验室 安徽淮南 232001
随 着矿山提、运、采、掘四大装备自动化、智 能化水平日益提升,辅助安装设备的机械化、自动化和智能化水平的提升就显得尤为重要。井下架管机是一种重要的辅助安装设备,通过核心部件机械臂来实现运管、架管、接管和固管等功能。为了提高架管效率,国内外学者对机械臂进行了大量研究,王君等人[1]通过 MATLAB Robotics Toolbox 对 UR5 机器人建立模型,再对其进行轨迹规划与仿真的研究,验证了机器人运动模型和 3 次多项式插值算法的正确性和合理性;李威等人[2]对三节臂挖掘装置建立运动学模型,采用遗传算法对优化模型求解,并对实例进行分析,验证了此优化方法有较高的应用价值;于瑞等人[3]基于杂交算法对机器人的运动时间实现了最优轨迹规划。以上述相关研究为基础,结合煤矿巷道的实际工作要求,笔者采用 3-5-3 多项式插值算法对三节臂进行轨迹规划,结合粒子群算法,实现了速度约束下三节臂轨迹规划时间的优化。
1 综掘架管机的结构设计
目前大部分矿区仍然采用人工架管的方式,尤其在两淮地区,架管效率较低。煤矿巷道断面通常选择直墙半圆拱形,净断面宽度为 4.2 m,高度为 3.4 m,管道安装高度在 1.7~2.6 m,在没有适合的辅助安装设备下,工人劳动强度大,急需改善。
1.1 架管机的工作原理
针对上述工况,笔者设计了一种煤矿辅助设备架管机,其结构如图 1 所示。架管机主要由牵引机构、行走机构、架管机构、钻孔机构、载人作业机构和运管机构等部分组成。架管机通过牵引机构到达指定工作位置,由钻孔机构对工作区域进行打孔作业,之后架管机构夹取管道,将其提升到一定高度,再协同载人作业机构将管道固定。其中,核心部件架管机构三节臂的运动轨迹决定了架管工作的效率,因此笔者对架管机构三节臂进行了轨迹优化分析。
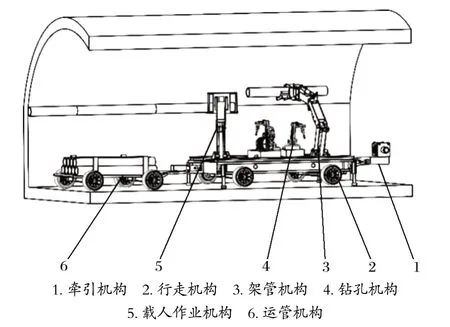
图1 架管机结构Fig.1 Structure of pipe erector
1.2 架管机三节臂结构
架管机三节臂结构如图 2 所示,主要由回转装置、第一节臂、第二节臂、第三节臂、夹管器和相应的液压缸组成。与两节臂结构相比,三节臂增加了架管的高度,通过辅助液压缸可以调节夹管器的角度。
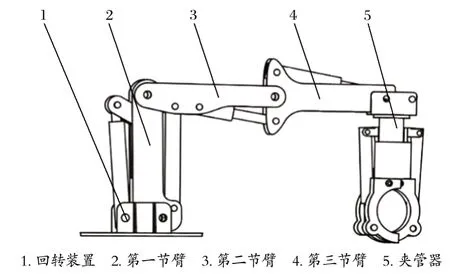
图2 架管机三节臂结构Fig.2 Structure of three-section arm of pipe erector
2 架管机三节臂的轨迹规划
为了清楚描述三节臂工作时的路径状态,判断末端位置是否满足巷道架管要求,笔者采用粒子群优化算法,以 3-5-3 多项式插值算法[4]对其运动过程中的关节位置、速度、加速度进行规划,优化三节臂的工作时间。
2.1 多项式插值函数构造
3-5-3 多项式规划是指在关节规划中,关节在时间t1采用 3 次多项式进行规划,在时间t2采用 5 次多项式进行规划,在时间t3采用 3 次多项式进行规划。在工作空间内,对三节臂进行轨迹规划,设置其工作路径,利用 3-5-3 次多项式对三节臂进行插值,设置 4 个插值点,用θij表示关节i插值的角度,其中i=1,2,…,n,n表示关节数,j=1,2,3,4,表示插值的 4 个序号。
第i个关节 3-5-3 样条多项式的通式为
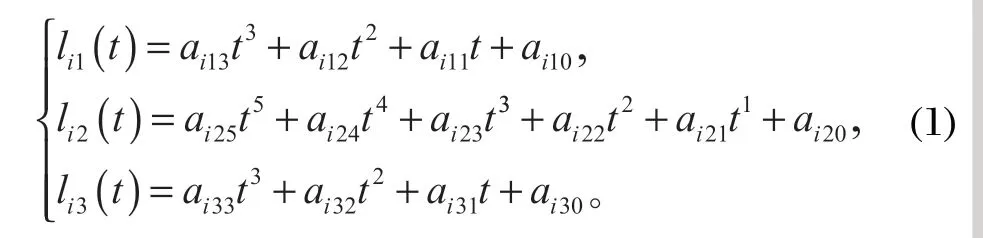
式中:li1(t)、li2(t)、li3(t) 分别代表第i段关节在 3 次多项式的运动轨迹、5 次多项式的运动轨迹、3 次多项式的运动轨迹;其中,未知系数a可根据约束条件求出,并根据约束条件和约束边界求出矩阵A[5],用θ=[θi0,θi1,θi2,θi3] 代表第i个关节的 4 个插值点 (弧度值)。已知条件为第i个关节的初始点θi0、路径点θi1和θi2、末端点θi3以及起止速度 0,则

根据已知条件,推导出求解未知数a与插值点的关系式为

2.2 基于粒子群算法的轨迹优化
粒子群算法[6]是对轨迹时间优化的一种方法,是在鸟群捕食过程中受到的启发,将每个个体看作 D 维空间内一个微粒,在搜索空间内以一定速度运动,通过个体之间相互协作和竞争来寻找最优解。在粒子群算法中,将每个需要优化的变数视为一个粒子,每个粒子都有一个适应值,由被优选函数所确定,并利用这种适应值的大小来确定粒子的最优值。在 D 维搜索空间内,每个粒子都有一个位置xi和一个速度vi,粒子经过的地方都会出现 2 个最优位置,即粒子所经历最优适应值的位置pi和所有微粒群体目前所经历的最优位置pg。当 2 个位置都不存在最优解时,第i个粒子就会通过式 (4)、(5) 继续k+1 次迭代来更新自己的位置和速度,直到找到最优的适应值。

式中:vid∈[-Vmax,Vmax];w为惯性权重;c1、c2为学习因子;r1、r2为 [0,1] 之间随机任意值;xid∈ [-xmax,xmax]。
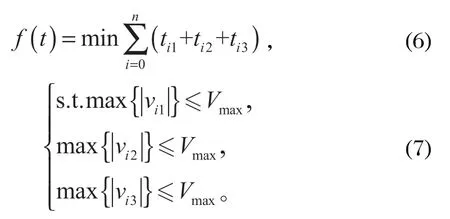
当xid和vid符合约束条件时,就用边界值代替,其约束条件为式中:t1、t2、t3为适应值函数。
为了方便计算,将t作为自变量,搜索维度降到三维,求解位置矩阵。
粒子群算法对三节臂第i关节进行时间最优规划的步骤为:
(1) 选取初始化种群规模,确定迭代次数,在三维空间内随机初始化粒子的位置xi和速度vi;
(2) 给出惯性权重w和学习因子c1、c2;
(3) 计算粒子的适应值及粒子群体适应值;
(4) 调用适应度函数 fitness Trac,计算系数矩阵A,求出关节极值速度Vmax,若满足约束条件,则说明t1、t2、t3有效,否则说明当前值无效,flag 返回 false;
(5) 根据式 (4)、(5) 优化粒子的速度vi和位置xi;
(6) 判断粒子的速度vi和位置xi是否满足边界条件,若超出边界条件,则用边界值代替;
(7) 获取粒子个体最优pi和粒子群体pg,判断是否满足结束条件,若不满足,则回到步骤 2,反之则终止迭代。
3 仿真与分析
3.1 三节臂的运动学模型
笔者采用改进 D-H 法坐标系[7]建立架管机三节臂的运动学模型,忽略三节臂的外形和尺寸,将其结构进行简化,得到机械臂各个关节的坐标系,如图 3 所示。确定架管机三节臂的参数,得到 D-H 参数,如表 1 所列。
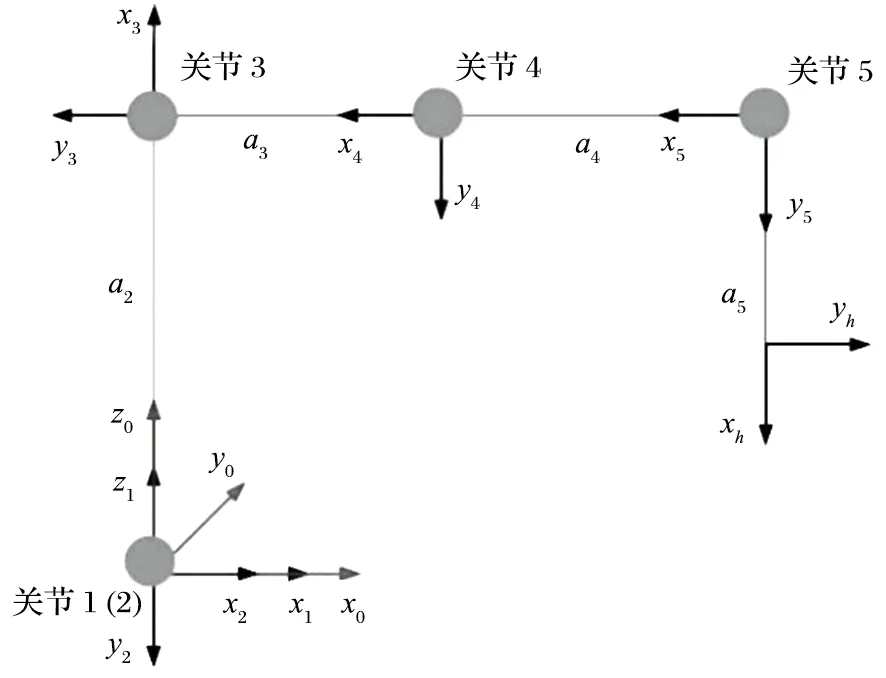
图3 三节臂连杆坐标系简图Fig.3 Sketch of coordinate system of three-section arm linkage
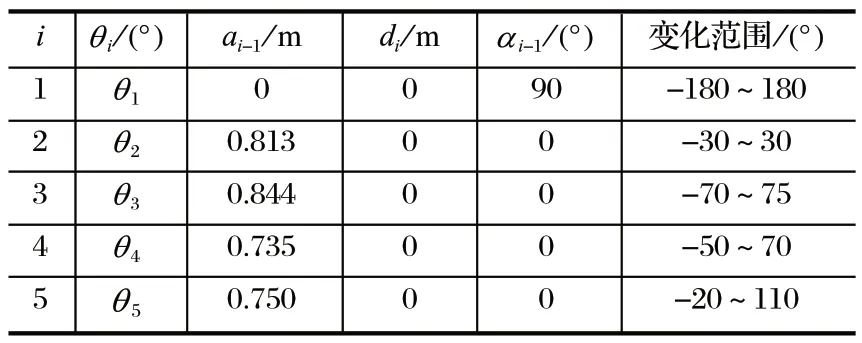
表1 架管机三节臂的 D-H 参数Tab.1 D-H parameters of three-section arm of pipe erector
以基座坐标系为基准,依次完成各个关节坐标系的转换,坐标系 {i=1} 到 {i} 的变换矩阵ii-1T由 4 个基础变换矩阵相乘得到,

其中
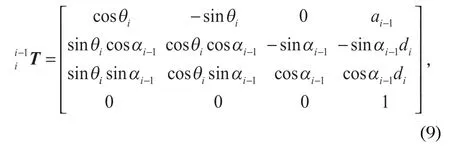
式中:ai-1表示从zi-1到zi沿xi-1测量的距离;αi-1表示从zi-1到zi沿xi-1旋转的角度;θi表示从xi-1到xi沿zi旋转的角度;di表示从xi-1到xi沿zi测量的距离。
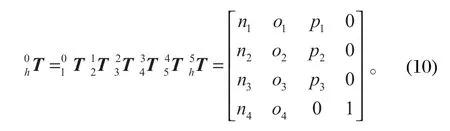
由表 1 可知,每个相邻连杆的位置变换矩阵相乘,即可得到三节臂的末端矩阵
3.2 仿真结果分析
给出三节臂的 4 个位置,即起始点θi0、抓取点θi1、路径θi2和终止点θi3,利用 3-5-3 多项式插值进行仿真,关节空间角度插值点如表 2 所列。在架管机三节臂工作时,为了架管过程中管道平稳性和安全性,关节 1 回转盘需要处于静止状态,因此,关节 1 的 4 个位置始终为 0。
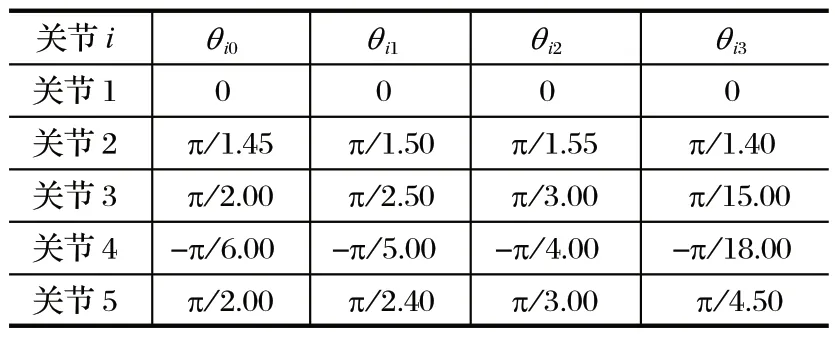
表2 关节空间角度插值点Tab.2 Interpolation points of joint space angle
根据粒子群算法最优规划步骤,利用基于粒子群的 3-5-3 多项式插值算法,确定每段插值的最优时间。确定插值的粒子种群数为 50,迭代次数为 100,粒子的惯性权重w=0.8,学习因子c1=c2=2,允许的最大速度Vmax=3 rad/s,起止点的速度和加速度都为 0,得到关节位置进化图,如图 4 所示。由图 4 可以看出,在速度约束下,4 个关节最优粒子pg位置进化曲线中,关节 2 经过 56 次迭代趋于收敛;关节 5 经过 18 次迭代后快速收敛;其余收敛均在 20~40 次之间。所以关节 5 相对平稳,说明在架管过程中末端夹管器处于稳定运动状态。
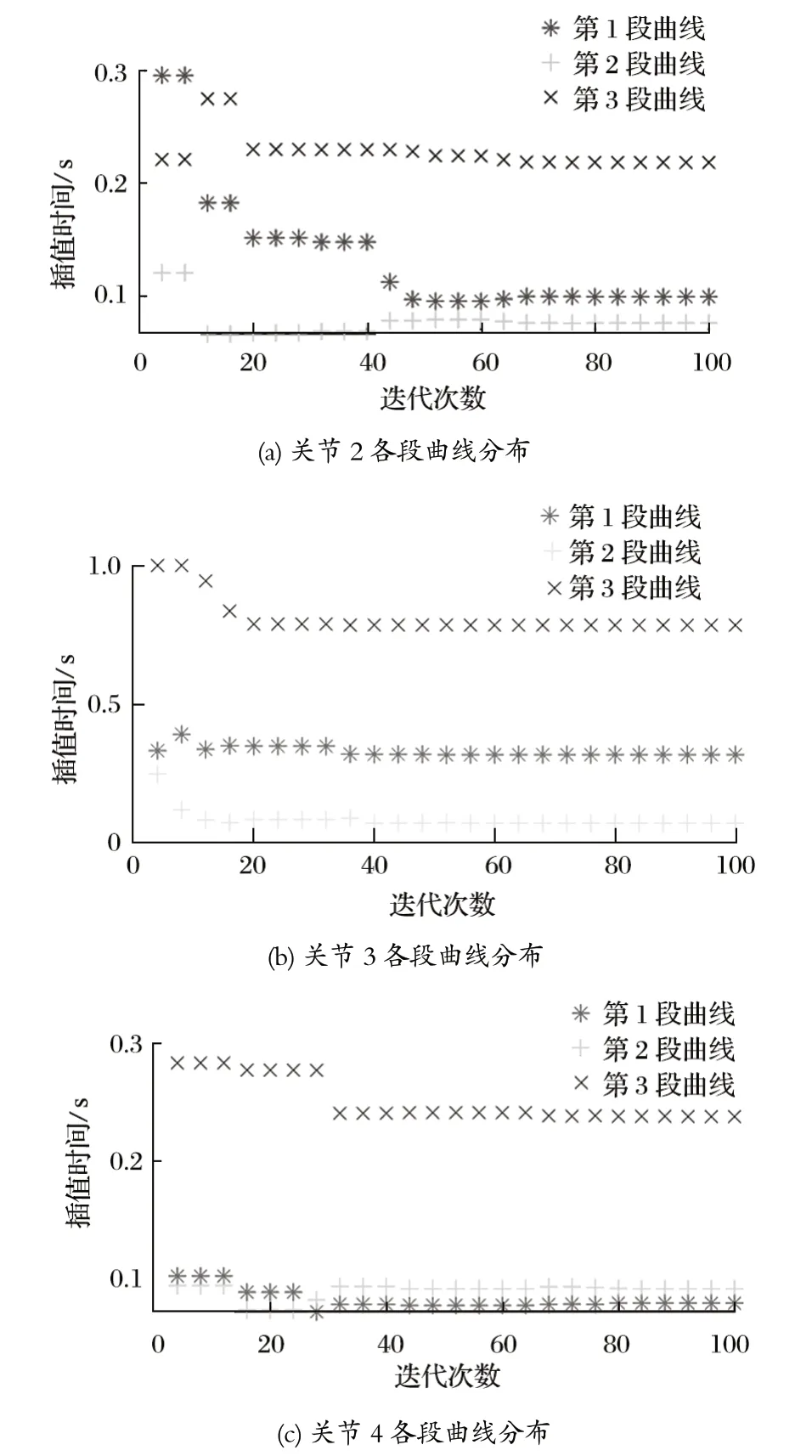
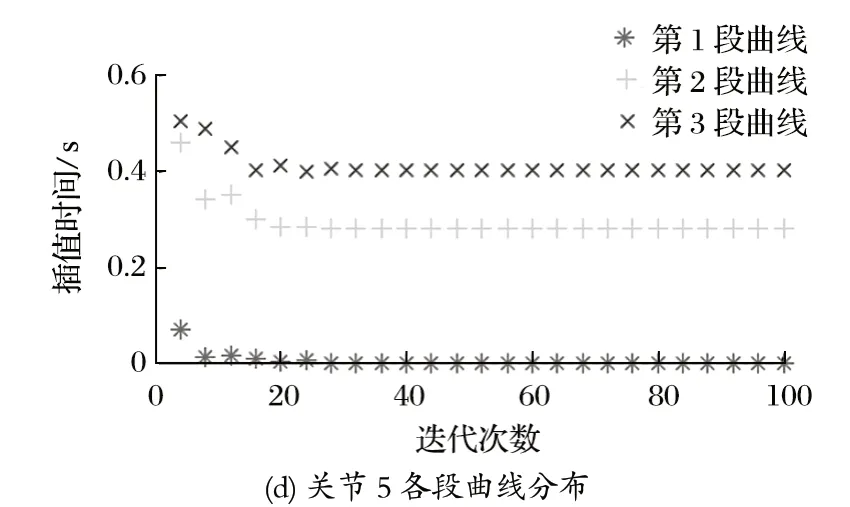
图4 关节位置进化图Fig.4 Evolution of joint position
3-5-3 多项式插值仿真轨迹曲线如图 5 所示。在给定各段时间具体插值准则的情况下。初始和终点的速度和加速度都为 0,满足运动学约束要求,其中t1=1,t2=1,t3=1;三节臂关节位置在每个时间段运动时间跨度大,速度未接近最大值,加速度在 2 s 左右出现跳变。
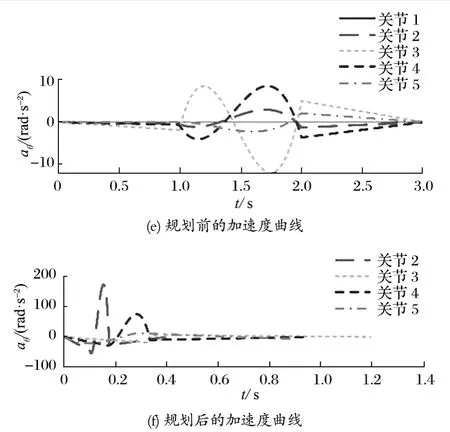
图5 运动仿真轨迹曲线Fig.5 Motion simulation trajectory curve
经过粒子群算法的 100 次迭代,得到每个关节的运动轨迹,与之前相比,时间整体缩短。优化后末端到达指定位置时间为 0.89 s,比优化前缩短了 2.11 s,速度在 0.21 s 达到峰值 2.97 rad/s,更接近设置的最大速度 3 rad/s。相比之前加速度的跳变,优化后的加速度曲线连续,跳变幅度更小。
基于粒子群优化算法,以 3-5-3 多项式插值算法对三节臂进行规划,其末端位置的轨迹如图 6 所示。由图 6 可以看出,曲线经过设定的 4 个位置,验证了该方法的有效性。架管机三节臂的工作空间高度可达 2.2 m,满足巷道架管的要求。
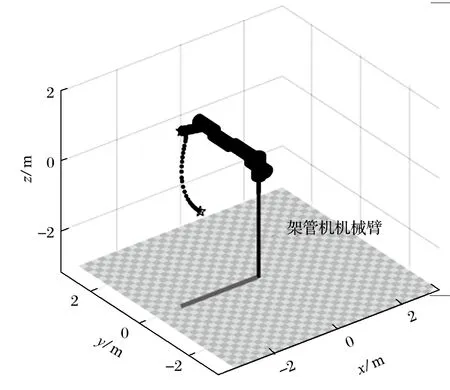
图6 规划后的轨迹Fig.6 Planned trajectory
4 结语
通过设计三节机械臂架管机,并对其进行运动学分析,运用粒子群算法对三节臂进行运动时间优化,得到了如下结论:通过轨迹规划得到三节臂末端高度为 2.2 m,满足巷道架管高度 1.7~2.6 m 的要求;通过 MATLAB 仿真得到三节臂的速度、加速度曲线,均满足插值时间点的平滑过渡,能够满足三节臂各关节在速度约束下的运动平稳性,具有较好的实用性。
