基于相关滤波器的雷达单扩展目标跟踪
2022-05-18李冬冬范红旗王丽萍蒯杨柳
李冬冬 范红旗 王丽萍 蒯杨柳


摘 要: 在传统的雷达目标跟踪算法中,目标通常作为点目标来进行跟踪滤波。随着雷达传感器分辨率的不断提高,一个目标可占据多个分辨单元,雷达可以提供高分辨率的观测结果。当目标变成扩展目标时,由于单个目标多个量测的产生,基于传统点目标假设的目标跟踪算法无法实现对扩展目标的稳定跟踪。本文基于计算机视觉领域的相关滤波算法提出了一种雷达单扩展目标跟踪算法。该算法首先对雷达回波数据进行归一化, 从而得到可视化的雷达距离-方位向图像,然后将该图像从极坐标系转换到笛卡尔坐标系,最后利用相关滤波器对扩展目标的外观进行精细化的在线学习, 并基于滤波器响应图实现目标跟踪。基于实测数据的实验结果表明,该算法可以得到每个时刻目标的位置和长度信息,和传统跟踪滤波算法相比具有更加准确和鲁棒的跟踪性能。
关键词: 时敏目标; 相关滤波算法; 滤波器响应; 扩展目标; 在线学习; 目标跟踪; 雷达
中图分类号: TJ760; TN958
文献标识码: A
文章编号: 1673-5048(2022)02-0019-05
DOI:10.12132/ISSN.1673-5048.2020.0249
0 引 言
雷达在军事和民用上均有重要应用,常用于检测和跟踪感兴趣区域内的移动目标,如空中飞机和海面舰船等[1]。传统的雷达通常将目标假设为一个点目标(最小可分辨单元)[2-4]。随着雷达分辨率的不断提高,感兴趣区域内的目标由点目标变为一个点群即扩展目标。传统跟踪滤波算法(如卡尔曼滤波)通常在预处理阶段将目标进行聚类并提取中心点作为目标的实际位置。这种假设对于远距离探测是合理的,因为目标的回波强度通常强于背景杂波,且回波信息较为集中。对于近距离探测和高分辨率雷达探测,目标占据多个分辨单元,目标的回波由同一个目标不同区域的回波构成,因而目标从一个点目标变为一个扩展目标。因此,传统的跟踪滤波算法将目标视为点目标,忽略了扩展目标的实际形状信息,从而导致目标状态估计的不稳定,进而出现跟踪漂移。
为了精确跟踪目标,扩展目标跟踪(Extended Object Tracking, EOT) 算法被提出用于处理高分辨雷达目标数据[5-6]。扩展目标跟踪可同时估计目标的中心点位置和目标的形状。通常,构成扩展目标的离散点被拟合成一个预先定义的形状(如矩形和椭圆)。和点目标跟踪模型相比,扩展目标跟踪算法考虑了目标的轮廓信息,因而具有更强的准确性。但是,当扩展目标被遮挡或发生航迹交会时,形状拟合会产生误差,扩展目标跟踪算法无法准确定位目标的位置。不准确的目标定位会进一步引起错误的目标关联,从而产生跟踪漂移。
受到计算机视觉领域跟踪算法[7-8]的启发,本文提出了基于相关滤波器[9-14]的雷达单扩展目标跟踪算法。和传统的基于轮廓模型的扩展目标跟踪算法相比,基于相关滤波器的扩展目标跟踪算法将扩展目标假设为一个矩形目标,同时将矩形区域内目标回波强度作为扩展目标的外观特征。和传统的基于运动模型的跟踪滤波算法相比,相关滤波器更关注于目标的外观信息,也就是目标的回波强度。在跟踪过程中,目标的回波强度会随着目标和雷达的距离变化而不断发生变化,目标的矩形框也会随着目标在极坐标系的运动而不断发生旋转。 相关滤波器可以利用在线学习不断适应变化的目标外观。 基于在线学习得到的判别式滤波器, 可以将跟踪扩展目标和背景杂波以及其他临近扩展目标区分开, 从而实现稳定的目标跟踪。同时,相关滤波器可以利用傅里叶变化将空域内的模板匹配转换为频域内的点乘计算,代码执行效率高,算法实时性强。故本文提出一個基于相关滤波器的雷达单扩展目标跟踪框架,主要贡献如下:
(1) 提出了一种雷达数据预处理方法。该方法对雷达数据进行归一化,并生成可视的雷达距离-方位向图像。距离-方位向图像从极坐标被变换为笛卡尔坐标系,从而一定程度上消除目标外观的旋转变化。
(2) 提出了基于背景上下文相关滤波器的雷达单扩展目标跟踪算法。该算法利用雷达图像的回波强度作为灰度信息并提取外观特征,从而在线训练相关滤波器系数并实现稳定跟踪。
(3) 基于开源的X波段海用雷达实际观测数据,对本文提出的雷达单扩展目标跟踪算法进行评估。实验证明所提跟踪算法在整段观测数据中能够对5个观测目标实现稳定跟踪。
1 相关滤波器数学原理
本文采用计算机视觉领域中的一个基于相关滤波器的跟踪算法对雷达扩展目标进行跟踪。这里采用背景上下文相关滤波器(Background Aware Correlation Filters, BACF)[14]对扩展目标进行跟踪。
传统的基于标准相关滤波器的视觉跟踪算法具有较高的准确性和速度,但搜索区域较小且容易受到边界效应的影响而发生漂移。BACF解决了边界效应的影响并扩展了搜索区域。给定当前时刻雷达图像上以目标为中心的图像切片,BACF从切片上提取高维外观特征。通过对高维特征进行循环移位,可以得到大量循环移位样本。BACF通过回归优化可以得到一个和样本相同大小的多通道相关滤波器f。假设前景目标样本为x,对应的标签为y,BACF可以通过训练得到一个多通道相关滤波器f。假设xl表示样本x的第l维特征。相关滤波器f可以通过求解式(1)中的优化目标得到:
ε(f)=∑dl=1xl*(p·fl)-y22+λf22(1)
式中: *为循环卷积运算; ·为点积运算; p为施加在特征x上的矩形掩模; y为高斯标签; λ为正则化参数。
为了利用傅里叶变换加速求解速度,式(1)可以转换到频域内求解:
ε(f, g)=∑dl=1xl*gl-y22+λf22
s.t. gl=p·fl(2)
式(2)可以利用ADMM算法求解,详细内容参见文献[14]。
基于相关滤波器的原理,雷达图像中目标跟踪的基本流程如图1所示。
2 雷达单扩展目标跟踪框架
针对X波段海用雷达实测回波数据,基于相关滤波器提出了整套舰船目标跟踪的数据处理框架。
2.1 雷达数据可视化
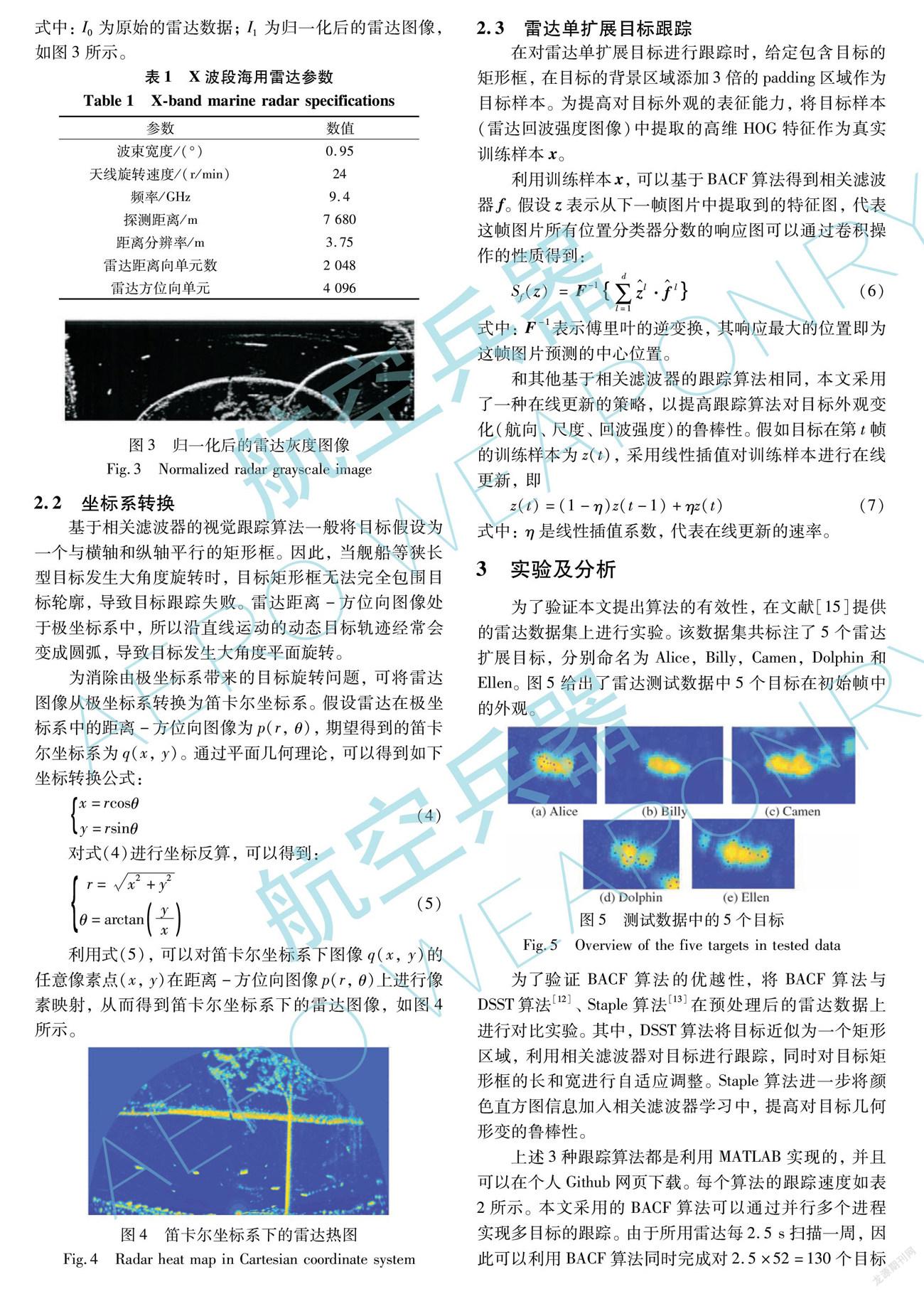
采用文献[15]中位于宜昌市长江岸边的X波段船用雷达于2013年8月8日采集的实验数据,雷达视野如图2所示。雷达的具体参数如表1所示。
采集的雷达数据共460帧,时长20 min。由于BACF算法的输入是灰度值为0~255的图像,需要对雷达数据
进行预处理,从而得到可视化的雷达图像。处理方法为
I1=256·I0-min(I0)max(I0)-min(I0) (3)
式中: I0为原始的雷达数据; I1为归一化后的雷达图像,如图3所示。
2.2 坐标系转换
基于相关滤波器的视觉跟踪算法一般将目标假设为一个与横轴和纵轴平行的矩形框。因此,当舰船等狭长型目标发生大角度旋转时,目标矩形框无法完全包围目标轮廓,导致目标跟踪失败。雷达距离-方位向图像处于极坐标系中,所以沿直线运动的动态目标轨迹经常会变成圆弧,导致目标发生大角度平面旋转。
为消除由极坐标系带来的目标旋转问题,可将雷达图像从极坐标系转换为笛卡尔坐标系。假设雷达在极坐标系中的距离-方位向图像为p(r, θ),期望得到的笛卡尔坐标系为q(x, y)。通过平面几何理论,可以得到如下坐标转换公式:
x=rcosθy=rsinθ (4)
对式(4)进行坐标反算,可以得到:
r=x2+y2θ=arctanyx (5)
利用式(5),可以对笛卡尔坐标系下图像q(x, y)的任意像素点(x, y)在距离-方位向图像p(r, θ)上进行像素映射,從而得到笛卡尔坐标系下的雷达图像,如图4所示。
2.3 雷达单扩展目标跟踪
在对雷达单扩展目标进行跟踪时,给定包含目标的矩形框,在目标的背景区域添加3倍的padding区域作为目标样本。为提高对目标外观的表征能力,将目标样本(雷达回波强度图像)中提取的高维HOG特征作为真实训练样本x。
利用训练样本x,可以基于BACF算法得到相关滤波器f。假设z表示从下一帧图片中提取到的特征图,代表这帧图片所有位置分类器分数的响应图可以通过卷积操作的性质得到:
Sf(z)=F-1∑dl=1z^l·f^l(6)
式中: F-1表示傅里叶的逆变换,其响应最大的位置即为这帧图片预测的中心位置。
和其他基于相关滤波器的跟踪算法相同,本文采用了一种在线更新的策略,以提高跟踪算法对目标外观变化(航向、尺度、回波强度)的鲁棒性。假如目标在第t帧的训练样本为z(t),采用线性插值对训练样本进行在线更新,即
z(t)=(1-η)z(t-1)+ηz(t)(7)
式中: η是线性插值系数,代表在线更新的速率。
3 实验及分析
为了验证本文提出算法的有效性,在文献[15]提供的雷达数据集上进行实验。该数据集共标注了5个雷达扩展目标,分别命名为Alice, Billy, Camen, Dolphin和Ellen。图5给出了雷达测试数据中5个目标在初始帧中的外观。
为了验证BACF算法的优越性,将BACF算法与DSST算法[12]、Staple算法[13]在预处理后的雷达数据上进行对比实验。其中,DSST算法将目标近似为一个矩形区域,利用相关滤波器对目标进行跟踪,同时对目标矩形框的长和宽进行自适应调整。Staple算法进一步将颜色直方图信息加入相关滤波器学习中,提高对目标几何形变的鲁棒性。
上述3种跟踪算法都是利用MATLAB实现的,并且可以在个人Github网页下载。每个算法的跟踪速度如表2所示。本文采用的BACF算法可以通过并行多个进程实现多目标的跟踪。由于所用雷达每2.5 s扫描一周,因此可以利用BACF算法同时完成对2.5×52=130个目标的实时跟踪。
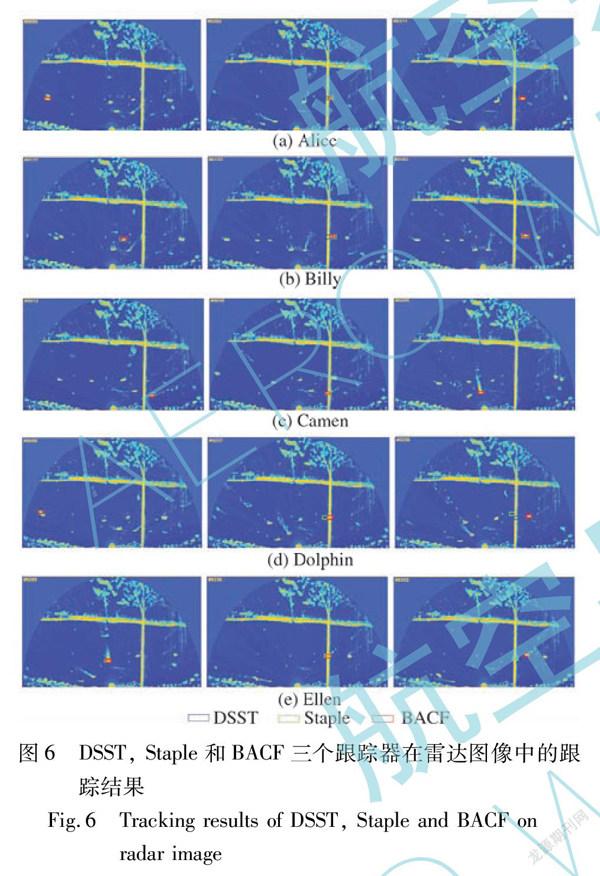
然后,分别在文献[15]中的五段数据(Alice,Billy,Camen,Dolphin,Ellen)上对DSST,Staple和BACF三个算法进行对比,跟踪结果如图6所示。
在Alice中,被跟踪目标和背景中相邻目标在99帧发生重叠效应,3个算法均没有受到干扰,保持准确跟踪。在302帧中,被跟踪目标穿越桥梁时被遮挡,DSST算法发生跟踪漂移,Staple和BACF保持准确跟踪。
在Billy中,目标在第1帧到117帧之间发生旋转和外观变化,3个算法均能保持准确跟踪。在第153帧中,被跟踪目标穿越桥梁时,DSST算法发生跟踪漂移,而Staple和BACF均能够保持准确跟踪。
在Camen中,目标在第59帧穿越桥梁发生遮挡,3个算法都没有丢失目标。在后续时刻中,目标不断接近雷达从而回波不断增强,使外观发生剧烈变化,3个算法都能够保持准确跟踪。
在Dolphin中,在第88帧,被跟踪目标与背景中临近目标发生交会,3个算法均没有受到干扰。 在第237帧中,被跟踪目标穿越桥梁发生遮挡,DSST和Staple算法发生跟踪漂移。在第256帧中,当目标远离桥梁时,DSST和Staple算法完全丢失目标,BACF算法仍然能够准确跟踪目标。
在Ellen中,从初始帧到285帧,目标距离雷达的距离不断减小,回波强度不断增强,目标外观发生剧烈变化,但3个算法都能够保持准确跟踪。在第336帧中,目标穿越桥梁时发生遮挡,Staple算法发生跟踪漂移并逐渐丢失目标。DSST和BACF算法能够保持准确跟踪。
可以看到,在数据集的5段数据中,BACF算法均能够对目标保持准确跟踪,同时对目标的雷达回波强度变化和背景中的干扰和遮挡具有较强的鲁棒性。
4 结 论
本文针对X波段雷达实测回波数据,尤其是对于扩展目标跟踪难度大的问题,提出了基于相关滤波器的雷达单扩展目标跟踪算法。该算法通过对雷达回波数据进行归一化将雷达目标跟踪转换为视频目标跟踪问题,然后将极坐标下的距离-方位向图像转换为笛卡尔坐标系下的图像,从而消除目标在曲线航迹中的旋转问题。最后利用相关滤波器在线学习目标的外观变化,并实现鲁棒的目标跟踪。与其他跟踪算法进行实验比较,本文提出的雷达扩展单目标跟踪算法更加准确,鲁棒性更强,且可以实时运行。在下一步的工作中,将建立一个X波段雷达图像跟踪数据集并对海面目标进行标注,从而对雷达扩展目标跟踪算法进行定量评估。
参考文献:
[1] 刘本源, 宋志勇, 范红旗. 聚焦、检测、跟踪、再聚焦: 基于經典跟踪前检测框架的实时小目标检测技术[J]. 航空兵器, 2019, 26(6): 10-16.
Liu Benyuan, Song Zhiyong, Fan Hongqi. Focus, Detect, Track and Re-Focus: A Dim Target Detection Technique Using the Classical Detect before Track Architecture[J]. Aero Weaponry, 2019, 26(6): 10-16.(in Chinese)
[2] 王铮, 韩宝玲. 基于交互多模型的粒子滤波导引头机动目标检测技术研究[J]. 航空兵器, 2020, 27(1): 26-32.
Wang Zheng, Han Baoling. Research on Maneuvering Target Tracking Technology for Seeker Based on Particle Filter of Interacting Multiple Model[J]. Aero Weaponry, 2020, 27(1): 26-32.(in Chinese)
[3] 李云坤, 陈伟, 曹旭东. 粒子滤波检测前跟踪算法的粒子比优化方法研究[J]. 航空兵器, 2017(5): 25-30.
Li Yunkun, Chen Wei, Cao Xudong. Particle Ratio Optimization of Particle Filter Track-before-Detect Algorithm[J]. Aero Weaponry, 2017(5): 25-30.(in Chinese)
[4] 廖雪阳, 任宏光, 章惠君. 基于重采样粒子滤波的目标跟踪算法研究[J]. 航空兵器, 2016(5): 25-28.
Liao Xueyang, Ren Hongguang, Zhang Huijun. Research on Target Tracking Method Based on the Resampling Particle Filter[J]. Aero Weaponry, 2016(5): 25-28.(in Chinese)
[5] Vermaak J, Ikoma N, Godsill S J. A Sequential Monte Carlo Framework for Extended Object Tracking[J]. IEE Proceedings-Radar, Sonar and Navigation, 2005, 152(5): 353.
[6] 回丙伟, 宋志勇, 王琦, 等. 空中弱小目标检测跟踪测试基准[J]. 航空兵器, 2019, 26(6): 56-59.
Hui Bingwei, Song Zhiyong, Wang Qi, et al. A Benchmark for Dim or Small Aircraft Targets Detection and Tracking[J]. Aero Weaponry, 2019, 26(6): 56-59.(in Chinese)
[7] 管皓, 薛向阳, 安志勇. 在线单目标视频跟踪算法综述[J]. 小型微型计算机系统, 2017, 38(1): 147-153.
Guan Hao, Xue Xiangyang, An Zhiyong. Survey of Video Object Tracking[J]. Journal of Chinese Computer Systems, 2017, 38(1): 147-153.(in Chinese)
[8] Yilmaz A, Javed O, Shah M. Object Tracking[J]. ACM Computing Surveys, 2006, 38(4): 13.
[9] Bolme D S, Beveridge J R, Draper B A, et al. Visual Object Tracking Using Adaptive Correlation Filters[C]∥IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2010: 2544-2550.
[10] Henriques J F, Caseiro R, Martins P, et al. Exploiting the Circulant Structure of Tracking-by-Detection with Kernels[C]∥Computer Vision-ECCV, 2012: 702-715.
[11] Henriques J F, Caseiro R, Martins P, et al. High-Speed Tracking with Kernelized Correlation Filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3): 583-596.
[12] Danelljan M, Hger G, Khan F S, et al. Discriminative Scale Space Tracking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(8): 1561-1575.
[13] Bertinetto L, Valmadre J, Golodetz S, et al. Staple: Complementary Learners for Real-Time Tracking[C]∥IEEE Conference on Computer Vision and Pattern Recognition (CVPR),2016: 1401-1409.
[14] Galoogahi H K, Fagg A, Lucey S. Learning Background-Aware Correlation Filters for Visual Tracking[C]∥IEEE International Conference on Computer Vision (ICCV), 2017: 1144-1152.
[15] Zhou Y, Wang T, Hu R H, et al. Multiple Kernelized Correlation Filters (MKCF) for Extended Object Tracking Using X-Band Marine Radar Data[J]. IEEE Transactions on Signal Processing, 2019, 67(14): 3676-3688.
Radar Single Extended Object Tracking Based on Correlation Filter
Li Dongdong1, Fan Hongqi1, Wang Liping1, Kuai Yangliu2*
(1. College of Electronic Science and Technology, National University of Defense Technology, Changsha 410073, China;
2. Mechanical Service Center for Vocational Education, National University of Defense Technology, Changsha 410073, China)
Abstract: In traditional radar object tracking algorithms, targets are regarded as points in tracking filtering algorithms. With higher resolution in range and azimuth directions, a target can occupy multiple resolution units, so radars can obtain high-resolution observation results. When point targets turn into extended objects, the traditional point target tracking filtering algorithms can hardly achieve stable tracking to the extended object due to the increasing complexity in data association. In this paper, a radar single extended object tracking algorithm is proposed based on correlation filtering algorithm in the computer vision field. This algorithm normalizes radar echoes to get the visual radar range-azimuth image firstly. Then,this image is transformed into the Cartesian coordinate system from the polar coordinate system. At last, the target appearance of the extended object are online learned by the correlation filter to realize the target tracking based on filtering response diagram. Real data based experimental results demonstrate that this algorithm can obtain the object location and size in each frame. Compared with traditional filtering algorithms, this algorithm is more accurate and robust.
Key words: time-sensitive target; correlation filtering algorithm; filter response;extended object; online learning; target tracking; radar
