基于车牌识别的机混车道视频测速算法
2015-09-16隋宗宾等
隋宗宾等
摘 要: 通过对视频测速应用场景的分析,提出一种在机混车道中应用视频测速的方法。该方法首先采用二维图像标定的方法获得视频坐标与实际地面坐标之间的映射关系,针对机混车道的复杂场景,采用Lab颜色空间和形态学处理相结合的方法对车牌进行识别,准确地跟踪到目标车辆,有效地避免了其他运动物体的干扰,同时提出了采用模板更新的方式防止目标车辆跟丢。最后通过适当选取车辆经过检测区时的图像帧,获得车辆的位移及对应的时间间隔,从而获得高精度的速度测量结果。
关键词: 视频测速; 图像帧; 车牌识别; 目标跟踪
中图分类号: TN941?34; TP391.4 文献标识码: A 文章编号: 1004?373X(2015)18?0125?03
Abstract: Through analysis of video speed measurement scenarios, a way to detect the running speed of vehicles in mixed road by video speed measurement algorithm is proposed in this paper, in which the two?dimensional image labeling method is adopted to achieve the mapping relation between video coordinates and corresponding actual ground coordinates. Aiming at the complex scenarios of mixing road, the method of combining Lab color space with morphology is used to recognize the license plate, track the object vehicle precisely, avoid the disturbance of any other moving objects. Besides, the mode to refrain from missing object vehicles by a method of template updates is proposed. The displacement of vehicles and corresponding time intervals are got by picking up the image frame that the vehicles crossed the detection zone, with which the result of high?accuracy velocity measurement can be obtained.
Keywords: video speed measurement; image frame; license plate recognition; object tracking
0 引 言
随着时代的发展,视频技术已经有了质的飞跃,并在车辆测速中得到了广泛应用。原来大量利用环形线圈或者雷达来检测交通车辆的速度,测速效果很不理想[1]。随着智能交通技术的不断完善,也改变了测量车速的方法,利用视频技术进行测速已经成为智能交通(ITS)的重要组成部分。通过对摄像机拍摄视频进行分析以及对车辆的定位、追踪、计算等来获取车辆的行驶速度。目前视频测速技术的应用场景越来越复杂,很多学者完成了单车道视频以及多车道视频测速方法,但是对于复杂的机混车道考虑甚少[2]。本文针对机混车道的应用场景,提出了一种通过车牌定位区分机动车辆并且防止车辆跟丢的方法,提高了视频测速的精度,实验结果表明该方法具有较好的测速效果。
1 视频测速方法
1.1 视频测速系统组成
本文的测速方法主要组成为检测区域部分、车牌识别部分以及目标跟踪部分等。检测区域部分用来完成视频坐标与实际坐标的映射关系,完成目标定位。车牌识别部分主要是通过车牌区分机动车、非机动车以及行人等,便于以后的目标追踪,提高了目标跟踪的准确性。目标追踪主要利用背景模板的不断更新来防止目标车辆的丢失。
1.2 视频测速原理
首先在视频车道上画出两道检测线,车辆每次经过检测线时记录视频帧数M1,M2,通过帧周期[ΔT],计算出时间间隔[Δt],然后通过坐标映射关系获得两道检测线的实际距离D,求得车速为:
[v=D(M2-M1)ΔTN]
1.3 视频测速算法
(1) 视频坐标与实际坐标的映射
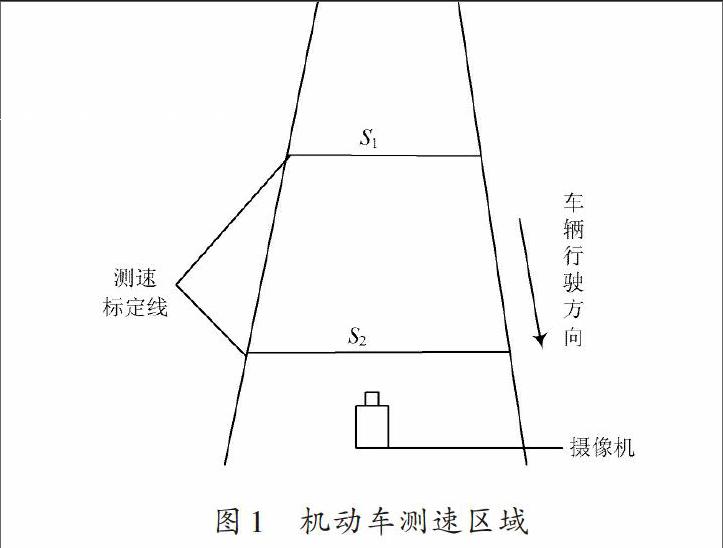
本文设置了如图1所示的测速区域,按图所示摄像机安装在车辆行驶的反方向,测速区域是由道路的边缘线和2条检测线组成的矩形测速区域,相机拍摄的视频中矩形测速区域显示为梯形状,如图2所示,测速区域坐标与地面实际坐标呈现非线性关系。
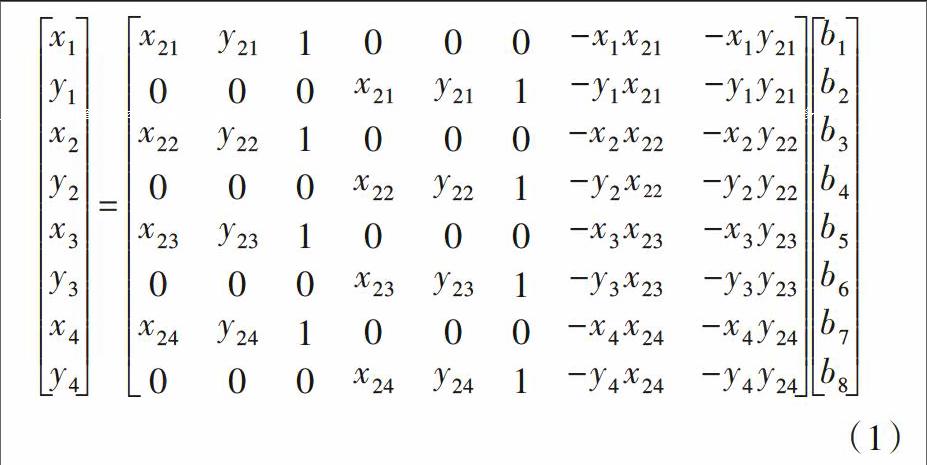
为减少测速的误差,必须对视频图像进行标定,得到实际地面坐标与图像坐标的映射关系。如图2所示,视频测速区域与道路实际坐标的映射关系为:
[x1y1x2y2x3y3x4y4=x21y211000-x1x21-x1y21000x21y211-y1x21-y1y21x22y221000-x2x22-x2y22000x22y221-y2x22-y2y22x23y231000-x3x23-x3y23000x23y231-y3x23-y3y23x24y241000-x4x24-x4y24000x24y241-y4x24-y4y24b1b2b3b4b5b6b7b8] (1)
式中:[(x1,y1)]~[(x4,y4)]为视频图像梯形检测区域的顶点坐标;[(x21,y21)]~[(x24,y24)]为地面矩形检测区域的顶点坐标;[b1~b8]为转换系数。若8点坐标均为已知,则可由式(1)求出[b1?b8]。在得到转换系数后,进而可以得到图像梯形检测区域中任意一点坐标(x,y)与地面矩形检测区域中对应点坐标[(x2,y2)],其转换关系为:
将属于视频图像中检测区内任何像素点的图像坐标(x,y)代入式(2)和式(3),可以求得该像素点所对应的地面坐标[(x2,y2)]。从而得到所测车辆准确位置。
(2) 车牌识别
考虑到机混车道的复杂性,在进行目标跟踪的时候可能出现非机动车以及行人的干扰,所以使用了车牌识别技术对车辆进行筛选。综合考虑车辆与行人的特征,本文采用了一种Lab颜色空间和形态学处理相结合的方法对车牌进行识别,进而识别出车辆,确定跟踪目标。主要是根据各种车牌的纹理特征判断是否为车牌,例如对于黄色车牌,主要是根据黄色车牌都为双行且比较脏的特点,首先将图像转化为Lab颜色空间,再从Lab的a通道中提取绿色和红色区域,在b通道中提取黄色区域,进行二值相减,获得图像的黄色区域,并且利用形态学处理滤除噪声等的影响,进而定位车牌。具体流程如图3所示。
经过车牌的识别可以准确地检测到机动车,避免了机混车道中非机动车以及行人的干扰,仿真结果如图4所示。
(3) 防止目标车辆的跟丢
经过车牌识别确定了目标车辆之后,需要对目标车辆进行跟踪,考虑到车辆在交通环境中图像的不固定性,为了防止目标车辆的跟丢,本文提出了一种背景模板不断更新的方法,防止目标车辆的跟丢。
首先设定图像更新的阈值作为比较对象,每一次的模板与阈值进行比较,设置一个相关系数,如果相关性大于相关系数的时候,就对背景进行更新,反之保持原背景不变。然后将背景中目标车辆图像的面积和前景图像中车辆区域面积进行比较,面积相近则不更新背景,否则提取运动物体图像中运动物体显露出来的部分作为新模板,使下次能够准确地进行模板匹配,防止车辆的跟丢。
(4) 视频测速方法
本文的视频测速方法主要针对机混车道,车辆行驶方向与摄像机拍摄方向相反,采用摄像机和图像采集卡对图像采集,采集频率调至为40 f/s,即每25 ms采集一帧图像。在视频中可以任意虚拟的画出两条检测线,测得两条线上相应位置的坐标(x1,y1)和(x12,y12)通过式(2)和式(3)转化为实际路面坐标,然后进行坐标相减获得2条检测线的间距D,设目标车辆经过第1条检测线时视频帧数为M1,经过第2条检测线时的视频帧数为M2,[ΔTN]为帧周期,则速度为:
[v=DM2-M1ΔTN]
2 实验验证
实验验证过程中,使用雷达在公路上对过往车辆进行了测速以及录像,然后又对视频在相同的地点对相同车辆进行了测速。一般在100 km/h以下时测速误差在±8 km以内,车速100 km/h以上时测速差在±10%以内,就认为车速测量准确。为了验证视频测速的准确度,与雷达测速进行了对照,如表1所示。
表1 速度对照表
由于视频车辆检测器受外界复杂景物和环境光线变化影响,本文的视频测速还达不到雷达测速的检测精度,但是在避免行人和非机动车的干扰方面,相比其他视频测速设备,本方法误差能够控制在5%以下,而其他设备只能控制在10%左右,因此具有更好的测速效果,提高了测速精度。
3 结 语
本文通过Lab颜色空间和形态学处理相结合的车牌识别方法,有效地避免了非机动车和行人的干扰,融合了运动物体跟踪防跟丢技术,有效地提高了视频测速的精度。可广泛在视频车流量检测器中车辆速度的监测方面、交通流计算参考数据的获取、电子警察对车速的辅助测量方面以及为交通管理提供参考等方面得到应用。
参考文献
[1] 陈世忠,熊鹏飞,李宏一.对雷达测速不准的原因分析及改进[J].铁道通信信号2002,38(11):6?7.
[2] 李晴,徐群.复杂场景下多运动目标速度检测技术的实现[J].计算机与数字工程,2006,34(11):167?171.
[3] CHRIS S, GRIMSON W. Learning patterns of activity using real?time tracking [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(8): 747?757.
[4] ZHANG S, ZHANG C. Application of ridgelet transform to wave direction estimation [C]// Proceedings of the 2008 Congresson Image and Signal. Sanya, China: IEEE, 2008: 690?693.
[5] 黄丹丹,孙咏,任俊,等.利用图像识别的车速测量系统[J].计算机辅助设计与图形学学报,2005,17(6):1258?1262.
[6] 林雨,方守恩.基于视频技术的地点车速测定新方法[J].中国安全科学学报,2007,17(2):173?176.
[7] 邱茂林,马颂德,李毅.计算机视觉中摄像机定标综述[J].自动化学报,2000,26(1):43?56.
[8] 陈媛媛,柴治,陈泉林.基于视频检测的车辆测速方法[J].电子技术应用,2009(23):185?188.
[9] 陈群,杨东勇,卢瑾.基于车牌字符边界定位的视频测速[J].计算机工程,2014,40(5):158?163.
