集装箱码头箱号识别系统研发综述*
2022-05-06张科昌生绿伟刘国辉茅时群
张科昌 生绿伟 刘国辉 茅时群
上海振华重工(集团)股份有限公司
1 引言
自动化码头无人化、智能化是提升港口转运效率的关键。随着厦门远海自动化码头、青岛新前湾自动化码头和上海洋山港四期自动化码头的相继开港运营,在港口行业内起到了很好的示范效果[1]。
集装箱箱号作为集装箱的唯一ID标识,在集装箱各个转运环节中,都需要被记录。集装箱箱号的识别手段主要有人工方式、OCR(Optical Character Recognition,光学字符识别)方式和其他信息辅助识别(如RFID)方式。不同于传统集装箱码头人工肉眼识别和手动记录方式,OCR系统利用模式识别、深度学习等人工智能技术,在集装箱转运环节中自动获取箱体信息,如箱号、ISO码、箱门方向、铅封情况、危险品标识等。它能够改善集装箱码头作业流程,降低码头人力成本和设备维护成本,提高效率,同时能够形成完善的码头信息链,合理界定责任,提高服务质量。与其他信息辅助识别方式相比,OCR具有3个优点:依据被识别对象自身的特征进行识别,无需安装标签等其他辅助设备;非接触识别,不会造成被识别对象损坏;自动保存图像和记录识别信息,便于回溯分析。
箱号OCR系统涉及光学成像、计算机处理、网络传输等技术。首先,通过图像采集设备获取带有箱号的图像,并利用网络传输技术传输至计算机,然后计算机利用图像处理和识别技术,进行快速地字符切割和自动识别,精确地捕获和记录进出港的各类集装箱箱号,最后传输给后台,供码头操作系统或理货系统使用。
箱号OCR系统的理想应用场景是在一个光照均匀的环境下,静止的相机采集静止的集装箱箱号面,该理想工况下采集的图像能满足最基本的OCR算法要求。然而,在实际的码头户外应用场景中,箱号OCR系统的应用存在很多问题,主要表现在7个方面:
(1)集装箱箱号自身损坏、污染。
(2)箱号排列方式多样,有横排和竖排,竖排时有单列、双列、三列,横排时有单行、双行、三行等方式。
(3)集装箱箱号的背景色不统一,且不在同一个平面上。
(4)由于相机拍摄角度不理想,箱体褶皱容易导致箱号被遮挡及变形。
(5)系统的外部环境干扰因素多,因雨、雪、雾、阳光等客观因素,导致光照不均匀而且变化很大,成像质量差。
(6)相机视野受限、被遮挡或分辨率过低,导致成像中的箱号不完整或质量不高。
(7)相机与集装箱的相对运动导致采集到模糊图像。
为了解决上述问题,对箱号OCR系统的研究进展进行详细地梳理和分析,归纳出箱号OCR系统的基本构成、主要设备和关键技术,并对比典型厂商箱号OCR系统产品的优缺点,为箱号OCR系统的研发和设计提供依据。
2 箱号识别系统
2.1 识别对象
箱号OCR系统的识别对象是集装箱箱号,印于集装箱的外表面,它的作业工况依赖于集装箱转运过程中的各个环节。集装箱的箱号由15位编码构成,第1~3位为厂商编码(Owner Code),第4位为产品组编码(Product Group Code,常见的有U、J、Z),第5~10位为注册码(Registration Number),第11位为校验码(Check Digit),校验码通常带有白框,第12~15位为箱型大小和类型编码(Size&Type Code),一般会另起一行或一列单独排列。
箱号在集装箱外表面所处的位置及型式依赖于集装箱的类型,常见的集装箱类型有干货集装箱、开顶集装箱、平板集装箱、冷冻集装箱、罐装箱等。以干货集装箱为例,其箱号分布在集装箱的前、后、左、右和顶部5个表面的右上部区域。箱号的排列方式有横排和竖排(见图1)。

图1 干货集装箱顶部视图展开图及箱号位置示意图
2.2 箱号OCR系统作业工况
在集装箱转运过程的不同环节中,箱号OCR系统的作业工况也不同。依据转运环节,箱号OCR系统分为岸边集装箱起重机(以下简称岸桥)箱号OCR系统、堆场门式起重机(以下简称场桥)箱号OCR系统和闸口箱号OCR系统等。
2.2.1 岸桥箱号OCR系统
岸桥分为常规的单小车岸桥和带中转平台的双小车岸桥。岸桥箱号OCR系统是针对岸桥装卸船作业的箱号识别系统。单小车岸桥在船侧与集卡侧之间运输集装箱,在整个过程中集装箱处于运动状态,无法采集到静态集装箱箱号图像;而双小车岸桥拥有中转平台,通常在装卸船的过程中,集装箱会短暂停留在中转平台上,因此可以采集到静态的集装箱箱号图像,成像质量高,有利于后续的箱号图像处理与识别。岸桥OCR系统的成像设备通常安装于岸桥的连系梁上方和下横梁下方,其安装位置与集装箱之间的距离较大,可采集的集装箱箱面较多,箱号识别成功率也较高。
岸桥OCR系统一般采集集装箱长边所在的2个表面和短边所在的2个表面,共4个表面的图像。如果是双吊具双箱工况,则采集集装箱长边所在的1个表面和短边所在的2个表面,共3个表面的图像。如果是单吊具双20 ft箱工况,则采集集装箱长边所在的2个表面和短边所在的1个表面,共3个表面的图像。如果是双吊具双20 ft箱工况,则采集集装箱长边所在的1个表面和短边所在的1个表面,共2个表面的图像。因此,岸桥OCR系统的成像设备能够保证至少采集到2个集装箱表面的图像。
岸桥的作业流程分为装船作业流程和卸船作业流程,针对装船流程,箱号OCR系统的图像采集预置位位于装船车道,在吊具抓取集装箱时,利用吊具上的开闭锁信息触发相机采集带有箱号的集装箱图像;针对卸船流程,为保证整个动态作业流程不被中断,箱号OCR系统的图像采集预置位位于卸船车道,利用吊具的位置、速度及加速度信息,预估集装箱进入相机视野的时间点,触发相机采集带有箱号的集装箱图像。
2.2.2 场桥箱号OCR系统
场桥箱号OCR系统是针对堆场内场桥装卸集装箱运输车辆(典型的有集卡、AGV等)作业的箱号识别系统。与岸桥相比,场桥体积较小,作业空间狭小,在场桥的小车运动方向上,场桥与车辆之间的距离较近,车辆与堆场内的集装箱之间的距离也较近。在场桥的大车运动方向上,集装箱的短边几乎与场桥齐平,故可选择的集装箱箱号采集面较少,并且可供成像设备的安装位置与集装箱之间的距离较近,大多数情况下可供采集的集装箱表面只有1个,所以场桥OCR系统更难实现,且识别成功率较低。
场桥的作业流程分为装车作业流程和卸车作业流程,针对装车流程,为了保证整个动态作业流程不被中断,利用吊具的位置、速度及加速度信息,预估集装箱进入相机视野的时间点,触发相机采集带有箱号的集装箱图像;针对卸车流程,在吊具抓取集装箱时,利用吊具上的开闭锁信息触发相机采集带有箱号的集装箱图像。
2.2.3 闸口箱号OCR系统
闸口箱号OCR系统是针对外集卡或火车进出港口的箱号识别系统。在港区内集装箱会经过若干个位置固定的闸口,闸口间距相对较小,因此集装箱的短边所在的表面图像不易采集。但集装箱的上表面和长边所在的2个侧面的图像采集相对理想,且图像质量较高,所以闸口箱号OCR系统容易实现,且识别成功率较高。
2.3 箱号OCR系统硬件构成
集装箱箱号OCR系统的硬件主要由成像设备、触发设备、补光设备、供电设备、通信和处理设备、保护装置组成。
2.3.1 成像设备
目前成像设备主要有面阵相机和线阵相机。
面阵相机的感光单元按照二维阵列排列,其成像为直观的二维图像。虽然每行的像素点较线阵相机少,但是列数多,进而整幅图像的像素总数多,因此帧率通常会受到限制。目前普遍使用的面阵相机有普通的滚动快门面阵网络监控相机和特殊的全局快门面阵网络工业相机。监控相机具有品牌规格比较多、市场技术成熟、宽动态、高动态特征、价格便宜等优点,缺点是其图像传感器普遍采用滚动快门,容易产生运动模糊,不适合抓拍高速运动目标,且图像有编解码的过程,传输延迟大。监控相机分为枪型相机和带云台功能的球型或半球型相机。由于相机在岸桥上的安装和调试不方便,通常使用带云台功能的球型或半球型相机,可以随时更改拍摄角度,弥补相机安装位置的不一致差异。但带云台功能的球型或半球型相机与枪型相机相比,带有运动部件,不适合安装在高震动场景。特殊的工业相机可以使用全局快门,更适于拍摄运动物体,但无法实现宽动态及高动态功能,且成本较高,图像传输时未经编解码,网络传输带宽较高。
线阵相机又叫线性扫描摄像机,感光单元为一行感光元素,其成像为“带”状,适于大视野和高精度的应用场合。应用于箱号OCR系统时,无法独立成像,需要依靠其自身运动或被拍摄集装箱的运动,拼接成一幅二维图像,才能够进行箱号的识别。在闸口工况中,由于有固定的闸口,且集装箱的运动相对规范,所以线阵摄像机主要应用于闸口OCR系统。它能够完整的呈现集装箱箱面信息,不会出现面阵摄像机因视场角偏小导致的信息不全。缺点是需要获取集装箱的运动信息,且待整个集装箱通过线阵相机扫面区域才能获得完整的箱面信息。
2.3.2 触发设备
触发设备是触发相机采集图像的装置,它根据集装箱运动轨迹的规律,触发箱号OCR系统中相对应的相机进行抓拍图像和识别。常见的触发设备主要有磁钢及激光雷达、地感线圈、线性图像传感器、RFID、红外对射等几种形式。
2.3.3 补光设备
补光设备用于弥补夜间、环境光线不足、逆光、成像设备曝光时间不足等各种复杂工况,可以提高成像质量、保证成像的稳定性和一致性。补光设备分独立式补光设备和成像一体式补光设备。独立式补光设备可采用成熟稳定的补光灯,灵活多样,成本相对较低;成像补光一体式云台相机,具有成像方向与补光方向一致、结构紧凑等优点,但由于其运动部件太重,易导致相机预制位的丢失。补光设备又分为常亮型和智能型,常亮型补光设备不受外部因素控制,智能型补光设备是一种受控的补光设备,可以实现很多灵活性、场景化功能。
2.3.4 供电、通信和处理设备、保护装置
供电设备负责各个设备的供电,对于关键系统使用UPS不间断电源供电。通信设备主要使用TCP/IP网络通信技术,实现各个单元之间与主机之间的实时通信。处理设备负责图像的保存、识别、结果输出、与其他系统之间的衔接,主要采用工控机、嵌入式计算机、专用图像处理器等。保护装置是保护各个部件免遭损坏的装置,尤其是应用在室外环境的成像设备。
2.4 箱号OCR系统关键技术
箱号OCR系统的关键技术主要有触发技术、光学成像技术、补光技术和箱号识别技术。
2.4.1 触发技术
成像设备的触发模式主要有连续采集模式、软件触发模式和硬件触发模式。连续采集模式是指成像设备只要供电就持续输出图像信息,其对网络传输带宽的要求较高,对处理设备的资源消耗较高。软件触发模式主要依靠计算机软件逻辑自动进行判断,而硬件触发模式依靠外部设备对作业工况进行感知与决策,然后输出IO信号控制成像设备。例如:利用吊具的开闭锁信息、吊具的起升高度信息及加速度信息的软件触发模式,以及利用光电开关检测集装箱经过某一区域的硬件触发模式。
2.4.2 成像技术
成像技术主要包括自动对焦技术、自动曝光技术、宽动态技术、高动态技术。自动对焦技术是一种依靠对图像清晰度的判断,自动调节相机镜头焦距,使其工作在最佳状态的技术。自动曝光技术是利用图像的亮暗程度自动对曝光时间进行调节。宽动态技术是在相机成像时,实现图像较暗区域与较亮区域平滑过渡的技术。高动态技术是为获得较高成像对比度的技术。这些技术通过软件判断成像图片的清晰程度,自动调整相机成像的相关参数,改善成像质量。滚动快门相机在抓拍运动目标时,还需要增大相机光圈,减少软件曝光时间,使生成一副图像的帧头与帧尾的时间差尽可能小,以避免产生图像模糊、失真或叠影的现象。
2.4.3 补光技术
补光技术是一种主动补偿光照亮度的技术,可以使相机的成像更清晰。它利用光线传感器检测环境光,当外部光线充足时自动降低补光灯的照度,当外部光线不足时自动增强补光灯的照度。智能补光技术利用连续实时的图像质量智能评价程序自动调节补光灯照度,使补光设备工作在最佳成像和省电等综合指标最优的状态。智能补光技术也可以工作在触发模式,使用相机的IO接口控制补光灯使能状态,实现相机的帧同步曝光。
2.4.4 箱号识别技术
箱号OCR系统软件主要包含图像获取模块、图像预处理模块、箱号检测/定位模块、箱号识别模块、结果分析输出模块。箱号识别是在箱号检测的基础上,对箱号内容进行识别,将图像中的箱号转化成可编辑的文本,结合实际情况和对多幅图像识别结果进行综合判断,最后输出箱号信息。
3 典型OCR系统方案
目前国内外箱号OCR系统的解决方案种类繁多,典型的OCR系统方案可分为以监控相机为基础和以工业相机为基础的解决方案。基于监控相机的箱号OCR系统方案采用普通滚动快门的网络监控相机和独立式补光灯进行图像采集,使用工控机作图像处理设备,此方案被大多数厂家所采用。基于工业相机的箱号OCR系统方案采用特殊的全局快门的网络面阵相机,一体式摄像补光设备和分布式处理设备。这2种典型箱号OCR系统方案的性能对比见表1。
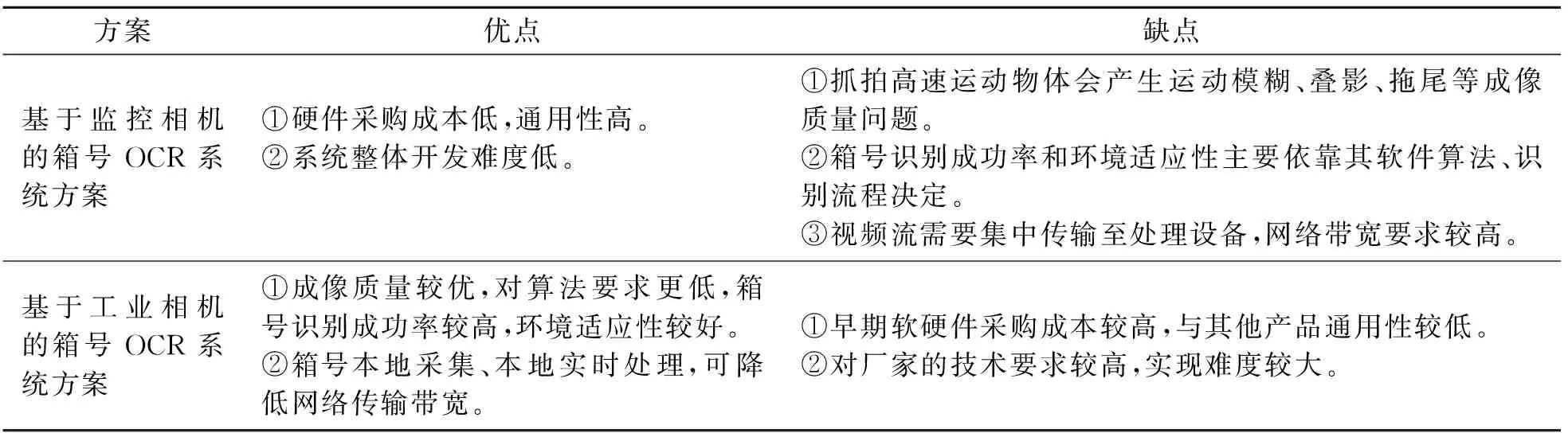
表1 典型箱号OCR系统的性能对比
4 结语
基于人工识别和记录的集装箱箱号识别技术手段已经不能满足日益增长的码头吞吐量需求。箱号OCR系统利用人工智能技术,在集装箱转运环节中自动获取箱号信息,能够改善集装箱码头作业流程,降低人力成本,提高集装箱转运效率和服务质量。
