一种基于机器视觉的模糊图像复原算法和粗糙度评估
2022-05-05陈鸿章
宋 进 陈鸿章
湄洲湾职业技术学院,福建 莆田 351100
0 引言
由于表面特性对产品的质量和性能有较大的影响,因此,表面特性的测量在制造业中具有重要意义。在传统的表面测量中,常见的方法是使用接触式测量,即将探针贴合工件表面来监测其运动,追踪表面的微轮廓,从而分析其粗糙度。甚至在一些生产应用中,依靠人工目测来监测,这种方法检测效率低、劳动强度大,检测判别的标准因人而异。这些方式虽然有较长的使用历史和范围,但是存在诸多限制和缺点。基于上述问题,本文提出一种运用机器视觉检测技术的壳体表面缺陷检测方法,它在获取缺陷信息和识别缺陷类型方面具有人工不可替代的稳定性和准确性,拓展了现代缺陷检测技术的发展方向。所以,随着技术的发展,非接触式检测方法开始受到更广泛的关注和应用,机器视觉分析方式就是其中的一种。
本文模拟获取了运动物体表面的模糊图像,再使用Lucy-Richardson(LR)算法对图像进行处理,验证了在特定条件下还原和识别原图并进行表面细节分析的可行性,以便用于工业的进一步数据处理。
1 运动模糊
在机器视觉中,如何对运动模糊的图像加以恢复,是多年来一直研究的问题。运动模糊是指当运动具有恒定的速度和固定的方向时出现的模糊。本文对运动模糊的成像加以分析,将模糊图像建模为理想图像与已知点扩散函数(point spread function,PSF)之间的卷积。
本文利用视觉系统获取了以25.4 mm/s 的速度移动的已加工表面(磨削和铣削)的图像,使用LR 算法对图像进行模糊处理。
当一个移动的物体曝光至感光元件(CCD)上时,如果持续时间较长,就会产生模糊。虽然可以通过低曝光来降低模糊,但这样会导致更高的噪声。这里,通过假设,可以将模糊过程建模为点扩散函数与理想图像的卷积,从而得到一个坐标上的三角形或高斯形状,如图1 所示。

图1 两种经典PSF 图像对比
由于考虑为匀速运动,可以假定所有部分都退化了相同数值的模糊。所以,在假设中认为图像所引入的噪声是高斯累加的。
此时,所需要解决的问题可以表述为:给定一幅灰度图像g
(x
,y
),通过线性平移不变的PSFh
(x
,y
)退化,找出真实图像f
(x
,y
)的可靠估计。2 算法设计
在这里,我们通过期望LR 最大化算法来探寻其最大化复原图像的可能性。从对原始图像的猜测开始,LR 算法在每次迭代中更新其猜测结果,使其趋向于潜在图像。从理论上讲,算法迭代的次数越多,越接近于收敛到所需的潜在图像。
LR 迭代可由成像方程和泊松统计方程导出:
其最大似然解出现在 对 的所有偏导数为0 的地方:

因此,迭代LR 算法可简写为:

通过比较上面的公式,可以看出,如果随着迭代的进行,修正因子趋近于一个单位,即LR 迭代收敛,那么它必定收敛于数据中泊松统计量的最大似然解。
3 LR算法的应用
为了评估LR 算法的性能,设置了由两个模糊的、紧密间隔的峰值组成的二维模拟图像。在模拟中,我们采用合成图像为128 个图像点的线性阵列,在阵列的69 和72 位置包含两个长度为100 的尖刺。然后将该阵列与标准偏差为1.5 个图像点的归一化高斯函数进行卷积,同时将添加一些均值为零的随机白噪声以模糊图像。得到原始图像和模糊图像分别如图2(a)和图2(b)所示。在应用LR 算法进行处理后,可见,经过20 次迭代,其结果如图2(c)所示。经过100 次迭代,其结果如图2(d)所示,图像质量得到进一步改善,明显收敛。

图2 模拟图像
4 图像捕捉和识别
实验装置为线性工作台与视觉系统相结合,使用研磨等工艺制成不同粗糙度的试样,并保持在电机驱动的线性工作台上,再通过帧捕获器将图像序列实时捕获到计算机中,然后使用LR 迭代算法进行处理并得出数据结果,以此评估恢复图像相对于原始图像的质量。
图3(a)所示为计算所有恢复图像的峰值信噪比(PSNR),图3(b)显示了信号噪声的峰值和重构的均方误差(MSE),两种曲线都显示了迭代后的快速变化。从图3 可以看出,算法性能快速提高,直到60 次迭代后几乎趋于稳定。但是算法的还原能力有限:一方面,迭代次数越多,恢复的图像情况越好;另一方面,所能取得的改善是有边界的。因此,即使对一个场景进行大量的迭代,也不可能完全重建已存储的图像。所以,为了防止算法最终产生噪声放大的情况,通常需要在收敛之前终止恢复过程。
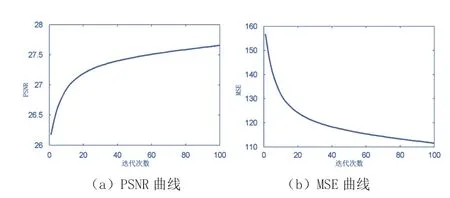
图3 多次迭代后的收敛规律
在上述基础上,可以基于Fernando Puente 的模型来补偿光照:

5 基于恢复的加工表面图像的粗糙度参数评估



图4 复原前的三维表面图像的功率谱

图5 复原后的三维表面图像的功率谱
(2)灰度标准差(STD)。
波动是表面粗糙度的自然属性,它的值由高、中、低频的变化共同组成。参数标准差表示相对于平均值的总体变异水平。
(3)灰度的算术平均(Ga)。

由于平均表面粗糙度(Ra)是目前国内外研究人员、工业领域等应用相对广泛、被接受范围较大的参数,故选用Ra 作为比较参数。
6 结果和讨论
本文基于机器视觉的表面图像检测方法,针对材料的表面特点设计了适合突显信息的图像采集方式,有效解决了成像不足和模糊等干扰,突显了物体表面的特征。成功地使用算法降低了因平滑运动而产生的表面图像模糊,并利用机器视觉,结合预处理技术对视觉粗糙度进行评价。从结果上可以明显看出,LR 算法在还原之前隐藏在噪声中的数据方面是有效的。因此,本文验证了使用机器视觉分析图像复原算法在实际生产、应用中的有效性。
