管带机智能巡检机器人的总体设计
2022-05-01廖辉
廖辉

关键词:管带输送机;机器人;智能巡检;STM32
中图分类号:TP242.6 文献标志码:A
0引言
随着供给侧改革成效逐步显现,优质产能得到了有序释放,我国经济持续平稳发展。工业增长对带式输送产品的需求量产生了积极的促进作用。十九大提出“既要金山银山,又要绿水青山”的号召。2018年,交通运输部、发改委提出“公路转铁路”的交通运输结构优化,减少公路运输带来的尾气排放、扬尘污染问题,2019年生态环保部、发改委等11部门联合印发《柴油货车污染治理攻坚战行动计划》。综合发布的各种政策来看,以管带输送为代表的经济环保的短途散料运输方式将迎来新的发展机遇。
政府部门连续下发了《中国制造2025》《关于加快煤矿智能化发展的指导意见》《关于促进智能电网发展的指导意见》等文件,确定了全面开展智能制造技术研究将是发展高端装备制造业的核心内容,传统的散料输送机械必须借助智能化升级改造的热潮以提高自身效能。
巡检机器人可以替代人工进行巡检作業,已经在一些工业场景中得到应用,例如电力行业、化工行业、地下廊道等相对静态的情景下,开展视频拍摄,设备的抄表、气体泄漏等逻辑相对简单的巡检。也有针对槽型带式输送机(以下简称皮带机)进行机器人智能巡检的运用案例,但是一方面现有机器人智能化水平较低,停留在视频拍摄的水平。另一方面管带机结构复杂程度远超皮带机,现有的皮带机巡检机器人的很多功能无法直接运用到管带机上[1-2]。
1巡检机器人功能需求
管带机智能巡检机器人基础功能有[3]:
(1)多物理量感知:配备高清视频拍摄,热成像拍摄,噪音检测和温湿度测量等功能,多种传感器用于提取管带机各种运行特征。
(2)自主避障:机器人能感知障碍物,实现智能防撞和避障功能,遇到障碍自动停止并报警。
(3)巡检任务自主规划:根据管带机的运行情况,自主规划巡检任务、充电策略。
(4)定位功能:当出现异常情况时,可以快速准确地确定位置,指导人工迅速到达现场。
(5)后台终端监控:在电脑、手机、平板等不同终端上均能登陆后台,对巡检机器人进行控制和对采集信息进行处理。
在以上基础功能基础上,针对管带机结构特点和故障严重性,要求智能巡检机器人必须具备的检测功能有:
(1)运行状态检测:输送带跑偏在管带机上表现为扭转,扭转后会造成撒料等故障。由于管带机的输送带卷成管状运行,故其边缘检测更为复杂。机器人采用基于AI视觉系统的图像自动识别装置,由视觉识别系统检测输送带搭接边缘,根据搭接情况进行扭转、反搭等判断并报警。
(2)托辊损坏检测:管带机的托辊数量数倍于皮带机,运行过程中托辊的检测工作量更大。机器人配备红外线热成像仪和音频采集器,通过收集运行状态下托辊的温度和噪音数据进行分析,结合视觉识别标定托辊,实现对托辊损坏情况进行检测及寿命智能诊断。
(3)输送带损伤检测:胀管是管带机特有的一种故障,表现为承载段管状带内物料填充率过高,可能导致桁架挤压变形,如图1所示。胀管、输送带撕裂等问题如果没有被及时发现,将导致重大经济损失。机器人采用可见光视觉识别、红外线、激光+CCD扫描等手段,对输送带形状进行对比分析,针对胀管、撕裂等问题实现实时报警。
2主要设计方案选型
2.1设计原则
(1)结构重量轻。减少机器人及其轨道对管带机钢桁架的附加载荷,提高整体经济性。
(2)续航时间长。由于管带机线路普遍较长(普遍有数公里),需要机器人具备较长的续航能力。
(3)可靠性高。机器人长期在户外各种环境中连续作业,通常全年无休,必须具备较高可靠性。
(4)机动性能好。管带机具有连续转弯和大角度爬坡能力,且桁架的截面多变,所以机器人必须相应具备动性能。
(5)环境适应强。机器人可能经历高低温、雨雪、风霜、大风、沙尘等,适用温度范围为-10℃~50℃,满足户外使用要求。
2.2行走方式
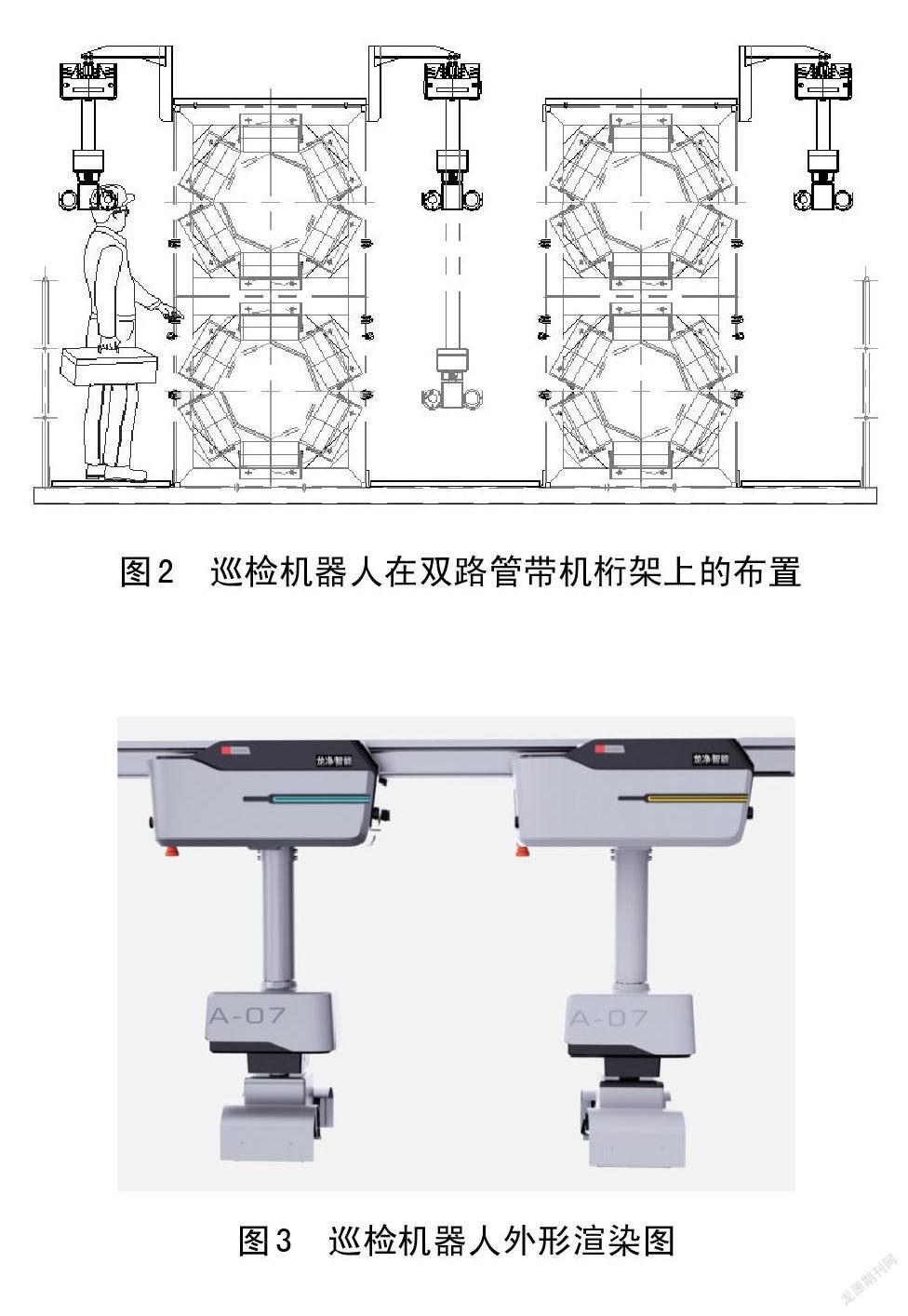
对比不同行走方式后,最终确定管带机巡检机器人的为桁架两侧悬挂轨道,机器人倒挂于轨道上行走。单路管带机布置两条轨道,双路管带机布置3条轨道,机器人其采用集转向、导向、预张紧及驱动为一体的双驱机构结构设计,满足管带机上桁架的线路变化,如图2所示。
由于管带机的桁架截面较高,因此配备伸缩范围为1.5m的竹节结构,方便机器人的摄像头观察回程段和承载段的所有托辊状态。机器人下端距离桁架走道的最大距离为1680mm,当机器人与走道行人相遇时,行人采取低头姿势后可以从机器人下方穿过。
机器人从上往下依次为行走部分、控制部分、升降节、摄像头云台。采用工程塑料外壳,银黑配色,搭配LED发光带用于显示机器人工作状态,如图3所示。
2.3控制组成
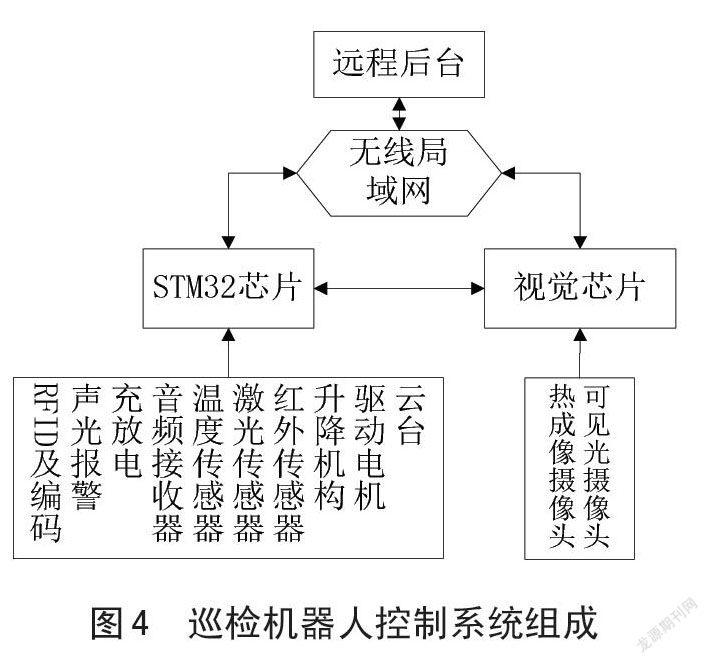
管带机智能巡检机器人系统组成如图4所示,由STM32芯片作为机器人的主控芯片,控制机器人各部件按照流程执行基本巡检操作。视觉芯片负责执行人工智能算法,处理双光谱摄像头拍摄的画面,并向远程后台传递处理后的数据。远程后台通过无线网络实现对机器人的管理,报警预警,数据处理等功能[4]。
由于主控芯片需要控制整台机器人,且需要配备较多的传感器,因此选择型号为STM32F103RET6,时钟频率为72MHz,闪存容量512KB,RAM为64KB,具有64个引脚可供使用。无线wifi通信采用串口转wifi芯片为ESP32,工作模式为AP,配置外置天线以提高信号强度。
视觉处理芯片采用NVDIAJetsonTX2,其AI算力达到1.33TFLOPs。使用开源的视觉库OpenCV结合C++进行算法编程,充分利用其自带的图像处理函数,大幅度提高项目开发进度[5]。
2.4驱动设计
运行速度v=0.1~0.3m/s,机器人重量m=30kg,爬坡角度α=15°,续航时间t=8h,驱动车轮直径D=0.05m,摩擦系数μ=0.2,传动系数η=0.9。
机器人拟采用减速电机直驱,在爬坡轨道上行走的功率和电机扭矩为:
根据平均驱动功率,可以计算出可达到额定续航时间所搭配的电池容量。鉴于锂电池具有长寿命、无记忆效应等优点,选择电池为两块12V20Ah的锂电池,布置在机器人两侧作为整套系统的电源。
根据功率和扭矩选择减速电机型号,通过单片机输出PWM控制电机的转速。电机最终选型为12V电压,电机额定功率为20W,输出转速110r/min,带霍尔编码器,可以通过单片机读取电机旋转角度信息。减速电机数量为2[6],如图5所示。
机器人运行定位方式为:首先以GPS模块获取机器人的大概经纬度,从而得到机器人在数公里长度的巡检线路上的大概位置,误差为10m。并在输送线路的关键位置,例如管带机过渡段、空间弧桁架段、充电坞站等安装电子标签进行定位,通过RFID实现机器人到达管带机不同区段后执行不同的巡檢任务规划。最后根据减速电机内的霍尔编码器反馈电机旋转角度,换算出机器人行走距离,和GPS定位、RFID定位相结合,从而得到较为精确的定位结果。
3人机交互控制界面
采用HTML+JavaScript+CSS的方式编写巡检机器人控制Web界面,提供了监控总览、报警管理、录像管理、查询与统计、机器人管理、巡检管理、系统管理等功能。能够对整个项目下所有机器人进行统一调度,所有机器人的报警信息均可在此呈现,并保存报警视频和图片,如图6所示。具备连续录像功能,最长保存视频时间1个月,方便回溯故障发生时的状况。
4机器人安装
主要涉及机器人本体、轨道、坞站、无线系统设备、机器人管理后台、光纤等安装施工,具体如下:
(1)轨道:沿桁架生根轨道支撑,布置机器人行走轨道,机器人沿轨道自由行走;
(2)坞站:头尾设置坞站,实现机器人自主充电和本体清洗;
(3)无线系统:沿线布置无线AP和配套通信箱,构建无线局域网,实现机器人与后台通讯;
(4)机器人管理后台布置在集控室,用于机器人的远程管理和监控;
(5)坞站、无线通信箱所需电源取自沿线照明配电柜;
(6)机器人清洗所需气源引自管带机头尾除尘器清灰系统。
5结束语
智能巡检机器人为长距离管带机巡检工作提供了一种新的解决方案。系统利用巡检机器人实时采集管带式输送机运行中的各种数据信息,并利用视觉识别技术进行前瞻性故障诊断,实现预防性运行维护,减少设备突发性故障,延长设备寿命,降低运营成本,进行全周期设备管理,消除事故隐患。
利用智能巡检机器人实现管带机巡检任务灵活性、智能化、自动化的管理需求,提高场内智能化管理水平。采用智能巡检替代人工巡检,可杜绝人生安全事故和提高巡检效率,实现安全高效生产运营。
