基于相干两点源的虚假运动目标生成方法
2022-04-21纪朋徽邢世其代大海冯德军
纪朋徽 邢世其 徐 伟 代大海 冯德军
(国防科技大学电子信息系统复杂电磁环境效应国家重点实验室 长沙 410073)
1 引言
合成孔径雷达(Synthetic Aperture Radar, SAR)是一种微波成像雷达,能够全天时、全天候地对地进行观测成像,并且成像分辨率不随距离变化发生改变,因此被广泛应用于地表信息观测、军事情报获取和导弹末端图像匹配制导领域[1,2]。合成孔径雷达地面运动目标指示(Synthetic Aperture Radar-Ground Moving Target Indication, SARGMTI)结合了SAR成像和地面动目标指示的优势,还能够对运动目标进行检测、定位和成像,并实时感知战场态势[3]。SAR和SAR-GMTI的广泛使用对我国高价值军事运动目标如指挥车、坦克和导弹发射车等构成巨大威胁,研究SAR-GMTI对抗技术具有重要应用价值[4]。
SAR-GMTI通常使用多个接收通道对消静止杂波来检测运动目标,多个通道的使用也提高了其抗干扰能力[5]。传统的SAR干扰技术,多以静止目标保护为基础建立,未考虑目标的运动特性,通过多个通道的对消处理容易被对消掉,干扰效果大打折扣[6,7]。基于运动调制的间歇采样转发干扰技术[8]、微动干扰技术[9]虽然能对抗SAR-GMTI,但这些方法生成的虚假目标分布较为规律,易被判别为假目标。散射波干扰虽然能携带丰富的地物信息和多普勒频移,生成的虚假目标较为逼真,不易被鉴别出来,但干扰目标的生成不易控制,且因需要地物进行2次散射,所需功率较高[10];基于多普勒调制的虚假目标生成技术能够生成位置可控的虚假目标,但速度无法控制[11],利用回波距离差异的虚假运动目标生成方法,能够生成位置和速度均可控的虚假运动目标[12],但这两种干扰技术都基于单个干扰机生成,虚假目标经重定位处理后方位位置与干扰机一致,易被识别[13]。文献[14,15]给出了基于多干扰机协同生成虚假目标的方法,重定位后目标方位位置与设定一致,较为逼真,但因为需要进行实时延时和多普勒调制,实现过程较为复杂。
基于以上背景,本文基于2维移频调制和双干扰机协同,提出了一种新型的虚假运动目标生成方法。其中2维移频调制能够控制虚假目标的位置并使虚假目标具有运动特性,双干扰机协同则使虚假目标相位在各个通道满足真实目标相位,使用该方法生成的虚假运动目标速度、位置均可控,且经重定位后目标被定位到其设定位置;此外,该方法使用移频调制生成虚假运动目标,实现方式简单,具备一定的工程可实现性。
本文首先分析了移频调制干扰生成的虚假目标对抗双通道SAR-GMTI的局限性,然后介绍了基于双干扰机协同的移频调制的虚假运动目标生成方法,最后通过实验仿真验证了本文提出的虚假运动目标信号生成方法的有效性。
2 单干扰机移频调制干扰的局限性

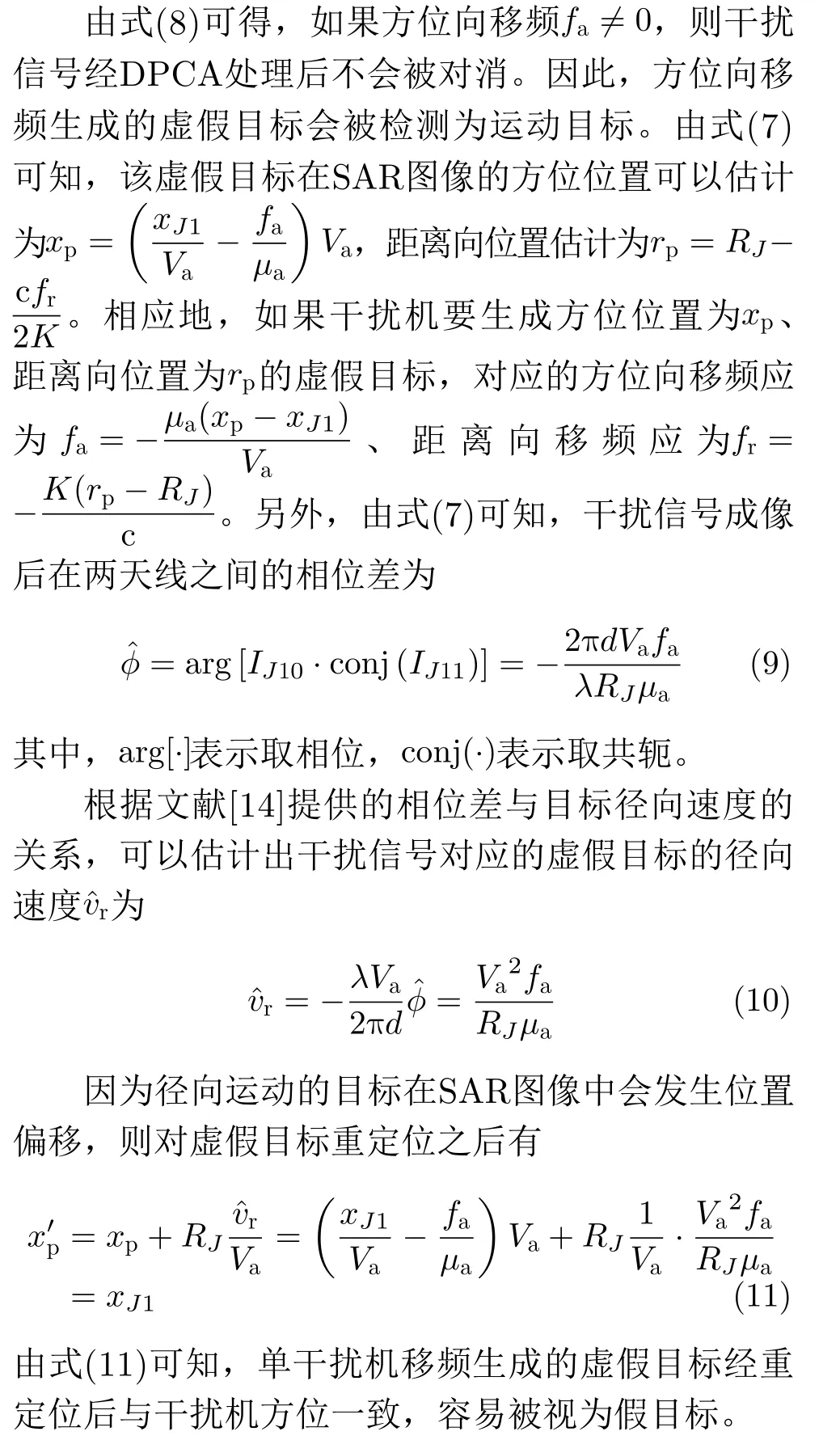
3 基于双干扰协同的移频调制干扰方法
通过第1节的分析可以知道,单个干扰机生成的干扰信号对应的虚假目标经重定位处理后可以被鉴别出来,主要是因为虚假目标成像结果在两副天线之间的相位差只与方位向移频量有关,而不能进行任意控制。如果设法在移频干扰对应的虚假目标处有选择的控制相位,那么生成的虚假目标经重定位后方位位置将不再与干扰机一致,虚假目标对应的速度也能进行相应控制。显然单台干扰机难以做到,可以考虑联合多台干扰机进行控制。
假设在图1对应的欺骗干扰场景中再增加一台干扰机J0,其坐标为(xJ0,yJ,0),径向距离坐标与干扰机J1一致,如果干扰机J0也在(xp,rp)处生成干扰信号,则其对应的方位向移频应为fa0=−µa(xp−xJ0)/Va,距离向移频应为fr=−K(rp−RJ)/c。相应地,干扰机J0生成的干扰信号在天线An成像结果为
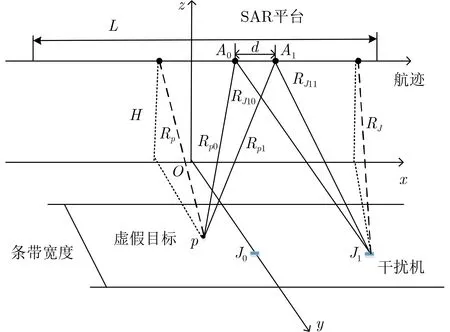
图1 双通道SAR-GMTI欺骗干扰模型

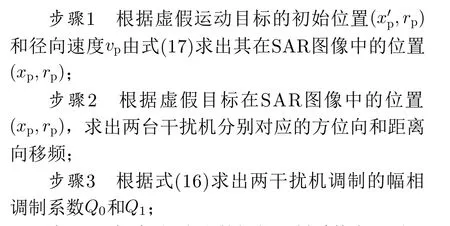
步骤4 把步骤3求出的幅相调制系数应用到两干扰机生成干扰信号的过程中。
经过以上4个步骤的处理,两干扰机协同生成的干扰信号将满足期望生成的虚假运动目标。
4 算法分析
4.1 双干扰机位置
根据第3节描述的双干扰机调制算法可知,双干扰机需要同时侦测到雷达信号时才生成干扰信号,因此两干扰机必须能同时处在主波束内,此时两干扰机之间的方位间距应当小于一个合成孔径长度L;并且为了使两干扰机同时处在主波束的时间更长,两干扰机之间的方位间距应当尽可能小。同时考虑到在单个干扰机生成假目标时采用的是移频调制方法,任一干扰机生成虚假目标时,方位向移频fa必须要小于方位向多普勒带宽Ba;因此,为了能在两干扰机之外的范围内生成较多虚假运动目标,两干扰机之间的方位间距最好小于半个合成孔径长度。因此,两干扰机之间的方位位置需满足

至于两干扰机的距离向位置,根据第3节对算法的推导,两者之间保持一致即可。
4.2 算法对比
根据文献[14]的介绍和对本文方法的阐述,传统的双干扰机协同方法与本文提出的干扰机协同方法在干扰机协同上是一致的,均需要首先根据虚假运动目标的特性,计算所需的幅相调制系数,然后每台干扰机据此调制系数生成虚假运动目标。两者的差异性主要表现在单个干扰机生成虚假运动目标的方式上,其中传统方法需要根据SAR与虚假运动目标和干扰机的实时距离差进行延迟和方位向相位调制来生成虚假运动目标,在以数字射频存储(Digital Radio Frequency Memory, DRFM)为主要结构的干扰机中,精确延迟通常在频域实现,这需要干扰机首先对接收的雷达信号进行FFT变换,然后通过与延时量有关的距离频域相位相乘实现距离延迟,其次再进行IFFT变换并进行方位向相位调制。而本文提出的方法单个干扰机只需根据虚假运动目标在SAR图像中的位置采用移频调制即可,总共需要距离向和方位向的两次相位调制,省略了FFT和IFFT变换,实现过程相对简单。
5 仿真实验
以某机载双通道SAR-GMTI雷达为干扰对象,其参数如表1所示。在接下来仿真中,目标和干扰机坐标单位均为米(m)。
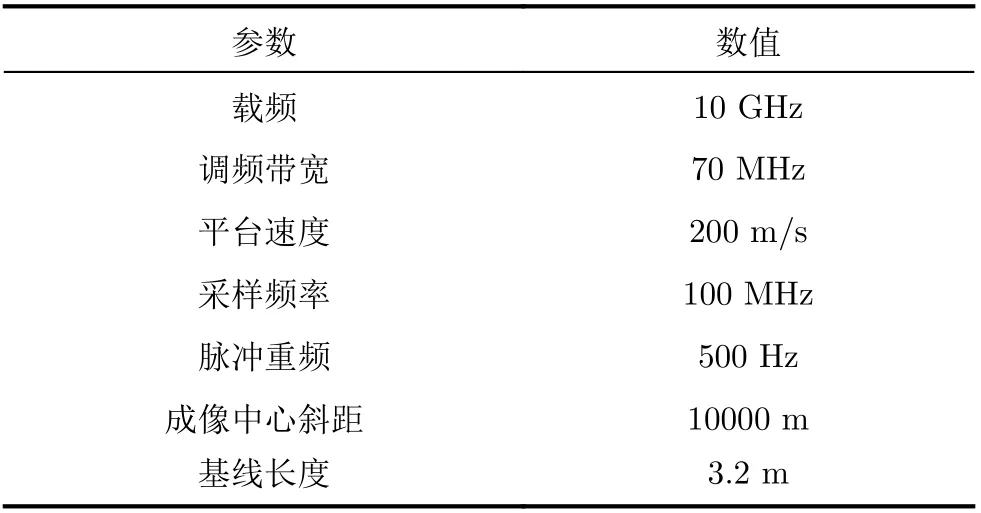
表1 两通道 SAR-GMTI系统参数
5.1 虚假点目标仿真对比
首先,对比单干扰机和双干扰机生成虚假运动目标的有效性。为此,设置4个虚假运动目标p1,p2,p3和p4,其坐标分别为(10,10040) , (−10,10020),(−20,9970), (30,9990),对应的径向速度为–0.3 m/s,0.5 m/s, –0.6 m/s, 0.8 m/s,映射到SAR图像中的坐标分别为(25,10040) , (−35,10020), (10,9970),(−10,9990)。另外设置了两个真实目标作为参考,一个是真实静止目标p5,坐标为(50,10010);一个是真实运动目标p6,坐标为(−20,9960),径向速度为0.7 m/s。两台干扰机J0和J1沿方位向放置,坐标分别为(0,10000), (−20,10000),由第3节介绍的虚假运动目标生成步骤生成相应的虚假目标。
图2上面一行给出了只有干扰机J0生成虚假运动目标的成像处理结果,下面一行给出了双干扰机联合生成虚假运动目标的成像处理结果,圆圈代表目标在SAR图像中的位置。图2(a)给出了单干扰机生成的4个虚假运动目标和两个真实目标的SAR成像结果,图2(d)为干扰机J0和J1协同生成的4个虚假运动目标和两个真实目标的SAR成像结果,可以看到两种方法都在相同的位置生成了虚假目标。图2(b)和图2(e)给出了DPCA对消处理后的结果,其中只有真实静止目标p5被对消掉了,单干扰机和双干扰机生成的虚假目标以及真实运动目标都未被对消,这说明干扰机通过方位向移频生成的虚假目标具有运动特性。
表2给出了所有目标的径向速度估计和方位位置重定位结果,可以看到真实目标p5和p6检测出的速度和重定位后的位置与设定值一致;单干扰机生成的虚假目标p1,p2,p3和p4都被测出了速度,经重定位后方位位置与干扰机J0一致,偏离了设定虚假目标的特性,而双干扰机生成的虚假目标检测出的径向速度和方位位置与设定特性基本一致,这证明了文中提出的干扰方法生成虚假运动目标的有效性。图2(c)和图2(f)为对应的目标重定位后的结果,直观地显示出单干扰机生成的虚假目标重定位后的位置在与干扰机方位位置相同的直线上,双干扰机生成的虚假目标都被定位到了其设定的位置。
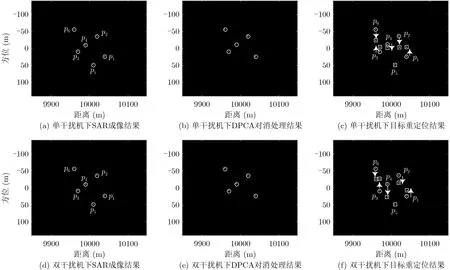
图2 真实及虚假目标成像处理结果
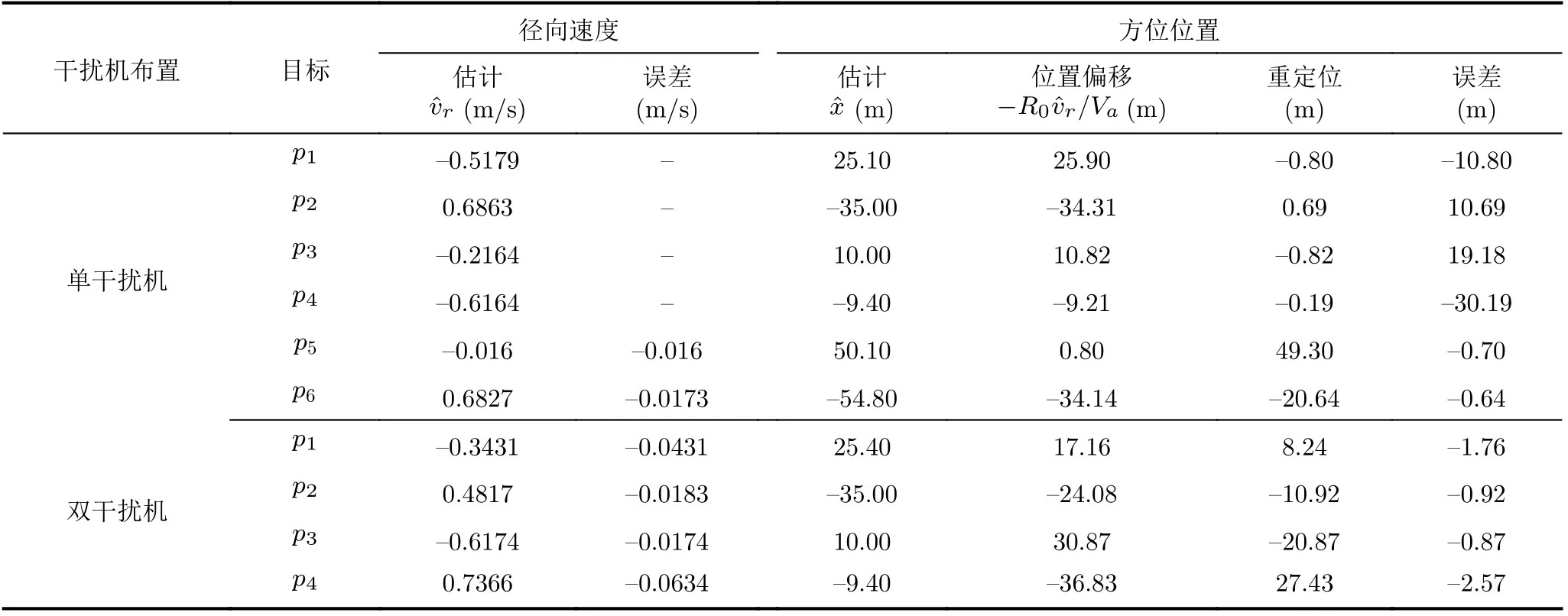
表2 不同干扰方法下目标的径向速度估计和方位位置估计
其次,为了进一步验证文中提出干扰方法的有效性,又仿真了多组虚假运动目标,对比其设定速度与估计速度之间的误差。根据文中对算法的推导可知,虚假目标的径向速度与距离向位置无关,为此假设此处虚假目标的距离向位置恒定为10030 m,方位位置在两干扰机附近以间隔2 m变动。考虑到干扰机的方位位置,把虚假目标的方位位置变动范围设定为(–40 m, 10 m)。图3给出了双干扰机生成不同的径向速度的虚假运动目标时,径向速度估计误差随方位位置的变动情况。可以看出双干扰机生成的虚假目标速度误差主要分布在0.02 m/s附近,误差很小,此时能达到较好的欺骗干扰效果;个别的在0.1 m/s附近,对比此种情况下目标设定的速度0.55 m/s和0.75 m/s,虽然误差相对较大但同样能达到一定的欺骗干扰效果。因此,本文提出的干扰方法能较好实现对SAR-GMTI系统的欺骗。
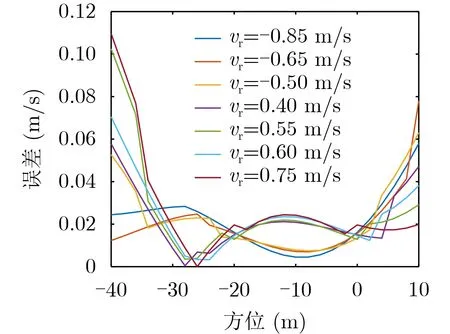
图3 虚假运动目标径向速度估计误差
最后,为了验证本文提出的双干扰机协同方法相对文献[14]介绍的传统干扰机协同方法的优越性,对比了两种方法在生成虚假运动目标上的差别,根据文献[14]的介绍,传统双干扰机之间的间距在1/2合成孔径附近时,生成的虚假运动目标鲁棒性强。此处结合本文提出的方法和SAR系统参数,选择干扰机之间的方位间隔为30 m,为此把上面干扰机J1的坐标调整为(30,10000),其他干扰机条件和假目标的参数均不变。表3给出了两种方法下生成p1,p2,p3和p44个假目标的速度估计,可以看出两种方法下生成的虚假运动目标径向速度均小于0.05 m/s,相比设定的速度误差可以忽略不计。两者在生成虚假运动目标的有效性性上基本一致,但因为本文方法在实现时只需移频调制,不需要实时延迟调制,过程相对简单,具有一定的优越性。

表3 不同双干扰机干扰方法下目标的径向速度估计和方位位置估计
5.2 基于实测数据的目标仿真
为了进一步验证文中提出方法的有效性,考虑在真实静止场景的公路上生成4个运动的虚假目标q1,q2,q3和q4,每个目标由3~4个散射点组成,如图4(a)所示,其对应的中心点坐标为(−40,9930),(−20,9960) , (10,10020), (30,10050),径向速度为–0.85 m/s, –0.8 m/s, 0.7 m/s, 0.8 m/s。相应地,中心点坐标映射到SAR图像中的坐标为(2.5,9930),(20,9960) , (−25,10020), (−10,10050),两台干扰机J0和J1沿方位向放置,坐标分别为(0,10000),(−20,10000),SAR-GMTI系统参数与5.1节相同。然后按照文中给出的方法步骤生成虚假目标。
图4(b)给出了虚假目标的生成结果,4个虚假运动目标均偏离其真实位置。图4(c)为DPCA对消处理结果,静止场景被消除,所有的虚假运动目标都得以保留。表4给出了虚假运动目标的径向速度估计和中心点方位重定位结果,可以看出生成的虚假运动目标与设定值基本一致,虽然误差较表2无背景情况下偏大,但仍在可接受的水平;其中q3的误差较大,这主要因为其受周围背景噪声的影响较强,但即使误差较大,仍能实现欺骗干扰的目的。图4(d)给出了虚假运动目标的重定位结果,结果表明经重定位后,虚假目标定位到公路上的位置与真实情况近似一致。以上仿真再次证明文中提出的双干扰机协同移频干扰方法生成虚假运动目标的可行性。
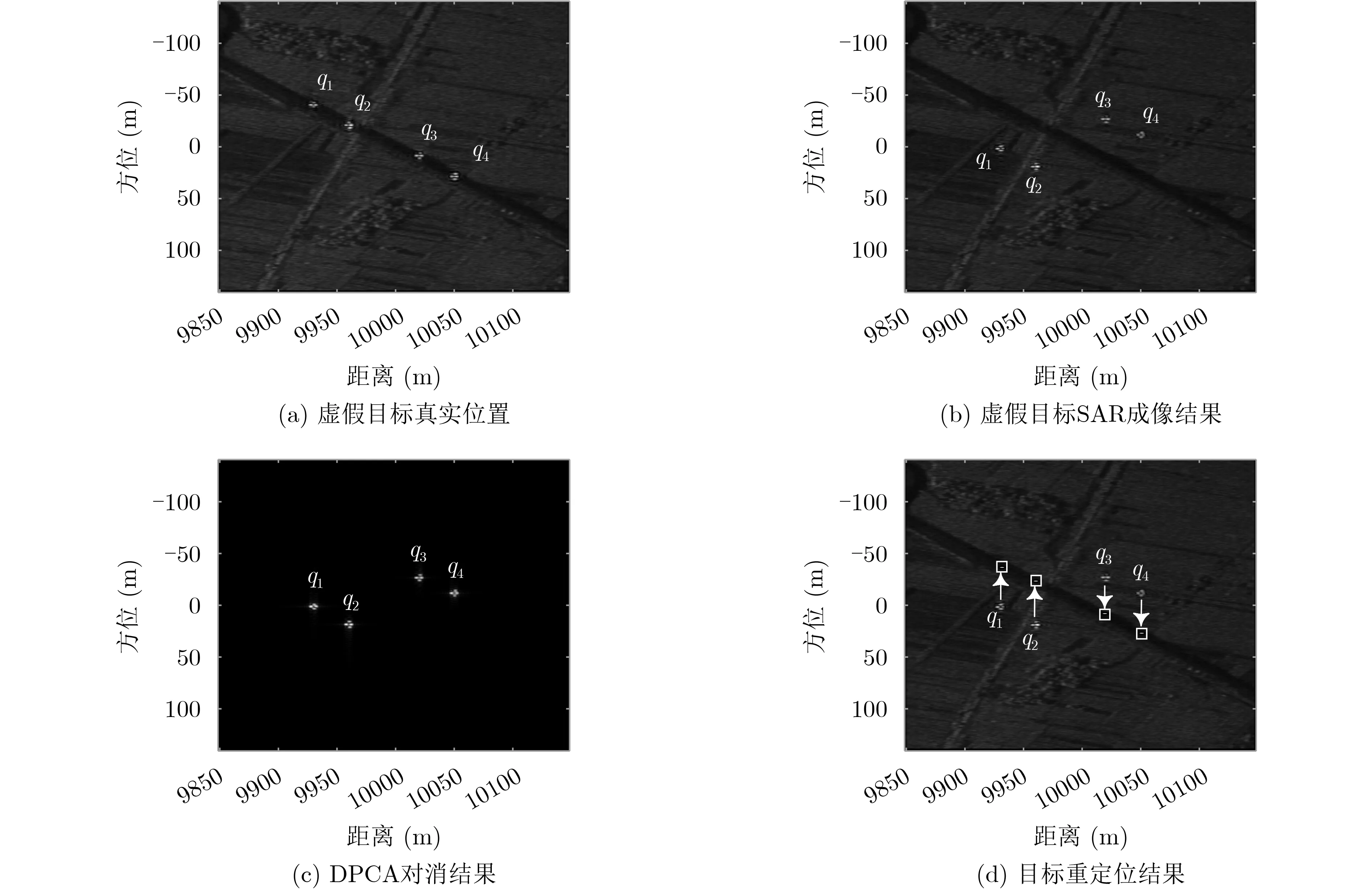
图4 静止场景虚假运动目标成像处理结果
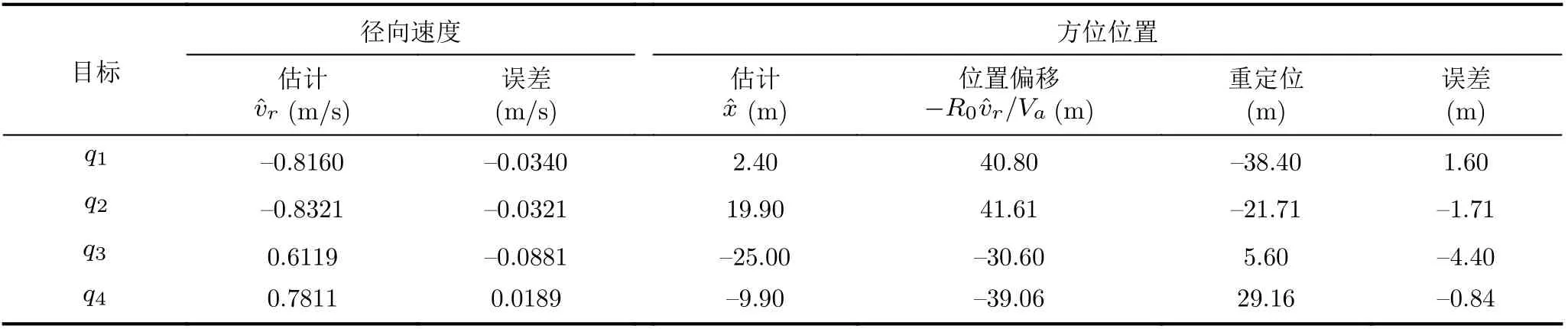
表4 静止场景下目标的径向速度估计和方位位置估计
6 结束语
本文提出了一种基于双干扰机协同的移频调制新型虚假运动目标生成方法,解决了单干扰机2维移频调制生成的虚假运动目标对抗双通道SAR-GMTI时方位位置固定和径向速度无法控制的问题。该方法通过2维移频调制控制虚假目标的位置,使用双干扰机协同控制虚假运动目标的径向速度。经验证,此方法可在双通道SAR-GMTI系统中生成逼真的虚假运动目标。该方法有3个优点:(1) 虚假运动目标的径向速度和方位位置可以灵活控制;(2) 2维移频调制干扰方式实现简单;(3) 双干扰机调制的幅相调制系数求解简单,且不随慢时间变化。
