基于先验信噪比估计的超宽带穿墙雷达呼吸信号检测算法研究
2022-04-21叶盛波倪志康郑之杰方广有
潘 俊 叶盛波 史 城 倪志康 郑之杰 方广有*
①(中国科学院空天信息创新研究院 北京 100094)
②(中国科学院电磁辐射与探测技术重点实验室 北京 100094)
③(中国科学院大学电子电气与通信工程学院 北京 100049)
1 引言
对地震和其他自然灾害摧毁的建筑物中被困人员的检测是一项重要的任务。因此,近年来穿透式呼吸检测设备得到了广泛的研究。超宽带(Ultra-WideBand, UWB)雷达由于其优良的穿透性能和距离向分辨能力,在穿墙目标检测中得到了广泛的应用[1–4]。在呼吸信号的检测中,很多学者分析了影响呼吸信号检测的因素。他们设计了各种雷达样机并提出了许多改进的检测算法来检测障碍物后的人体呼吸[5,6]。最大的挑战是如何提升低信噪比(Signalto-Noise Ratio, SNR)环境下的检测性能。在实际应用中,由于人体胸腔反射较弱以及障碍物引起的信号衰减较大,雷达获取的人体呼吸信号的SNR较低。如何提升穿墙弱呼吸信号的SNR具有重要意义。
时频域信号处理方法有利于低SNR环境下目标的增强和提取[7]。当采用时频域方法增强呼吸信号时,由雷达A-Scans组成的时域矩阵沿慢时间进行快速傅里叶变换(Fast Fourier Transform, FFT)转换为频域-距离矩阵。由于呼吸信号具备良好的周期性,它可以在频率-距离矩阵中更好地突出显示。之前已有学者提出了许多用于检测穿墙弱呼吸信号的时频域方法。Schleicher等人[8]组装了一个基于 FFT 的 UWB 雷达设备来监测呼吸信号。但是传统的FFT方法难以消除环境噪声。有学者提出利用经验模态分解(Empirical Mode Decomposition,EMD)、变分模态分解(Variational Mode Decomposition, VMD)、小波变换(Wavelet Transform,WT)等算法对穿墙雷达呼吸信号进行处理分析[9–11]。结果表明,VMD算法的提取效果最好,但算法参数需要针对性设置,适应性弱;EMD算法效果稍次,但其适用性强;WT算法对噪声的抑制效果好,适用于信号去噪。在这些工作中,EMD, VMD和WT等算法只对固定距离处对应的慢时间信号进行分析,因此需要事先提取目标的距离信息,不适用于未知场景中目标距离和呼吸频率的同时快速提取。Harikesh等人[5]提出采用多通道信号的互相关来提升呼吸信号的信噪比,实验结果表明多通道互相关结果优于单通道,但是系统复杂度大大提高。Nezirovic等人[12]采用奇异值分解(Singular Value Decomposition, SVD)处理频率-距离矩阵来检测废墟低SNR环境下的弱呼吸信号。SVD可以有效地消除杂波和噪声,但SVD 的缺点是难以区分呼吸信号子空间和噪声信号子空间。该方法假设频率-距离矩阵中的弱呼吸信号集中在较大的奇异值上。但是,部分噪声也会残留在这些较大的奇异值中,这将导致很难去除与呼吸信号相同频段的噪声。根据现有的研究方法,有必要提出一种具有高输出SNR的实时弱呼吸信号检测算法。
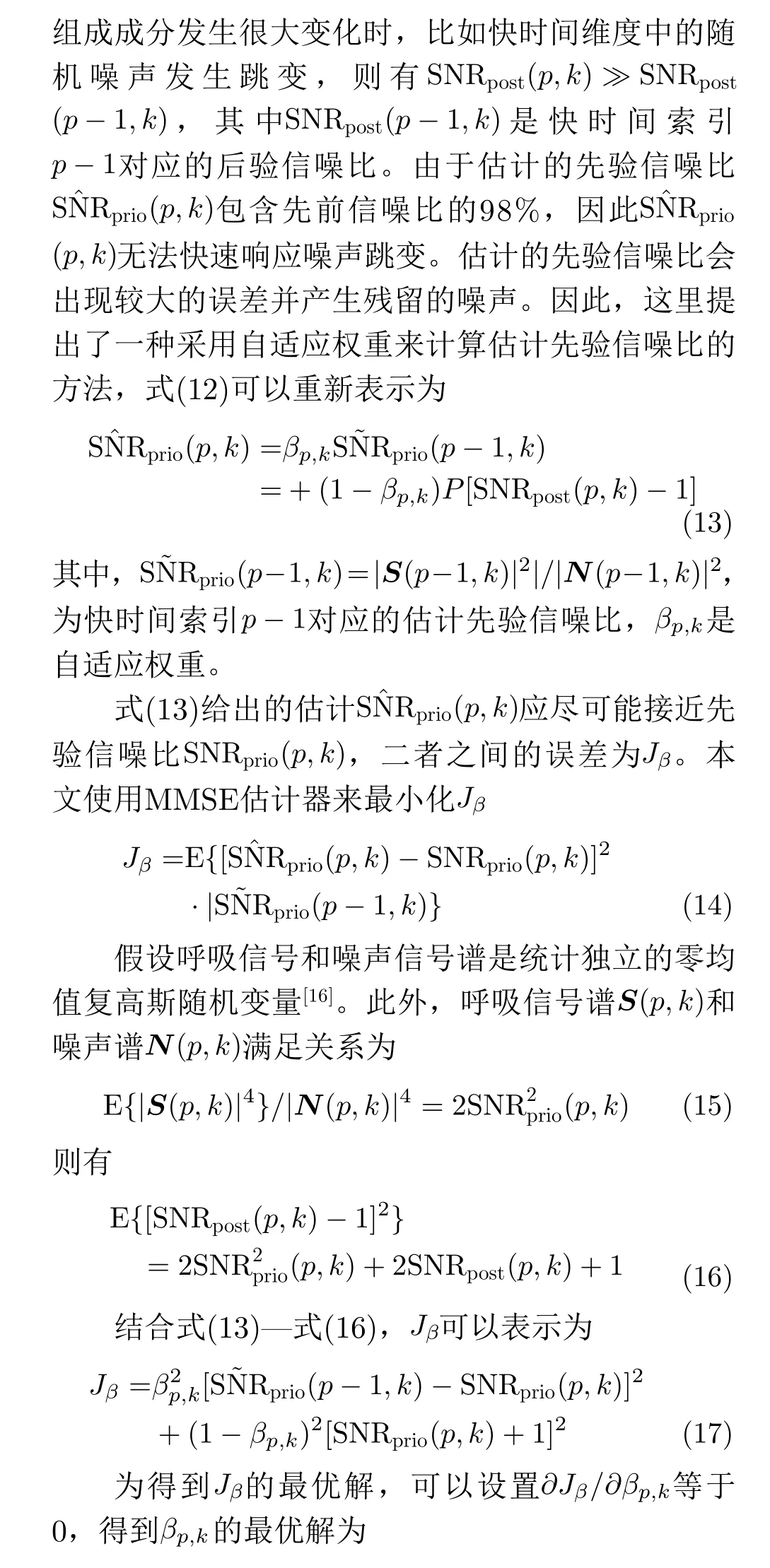
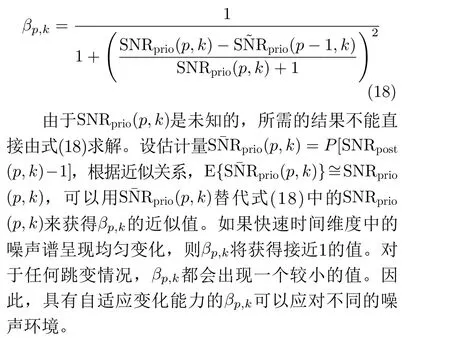
在语音信号增强算法领域,频谱减法是一种重要的方法。而其中最为典型的当是决策导向(Decision-Directed, DD)算法,因为该算法的复杂度较低[13]。在穿墙呼吸检测中,传统的DD算法通过建立加性噪声模型,根据估计的先验信噪比将呼吸信号与噪声区分开来。DD算法的缺点是用于估计先验信噪比的权重因子是一个固定值,这会使信噪比的估计过程无法适应噪声的变化而导致噪声残留[14–16]。本文通过修改传统的DD算法,进一步提高了穿墙弱呼吸信号的输出信噪比。所提算法采用最小均方根误差(Minimum-Mean-Squared-Error,MMSE)计算出自适应权重因子,可以减小估计先验信噪比的误差,从而进一步去除残留随机噪声。将所提出呼吸信号检测算法与传统的FFT,SVD和DD算法进行比较,仿真和实验结果表明,所提算法能够显著消除随机噪声,提高呼吸信号的输出信噪比。
本文首先介绍穿墙呼吸信号回波模型并进行预处理;其次,给出了所提呼吸检测算法的推导过程;再次,通过仿真和实际穿墙检测结果验证了所提算法的有效性;最后,给出了本文的主要结论。
2 信号模型和预处理
2.1 穿墙呼吸信号模型

2.2 信号预处理
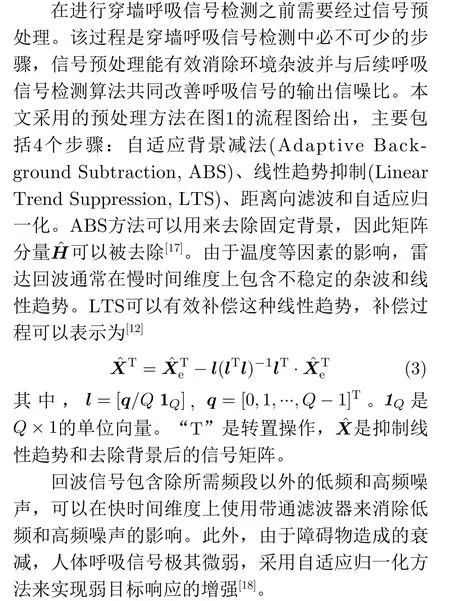
3 所提出呼吸信号检测算法

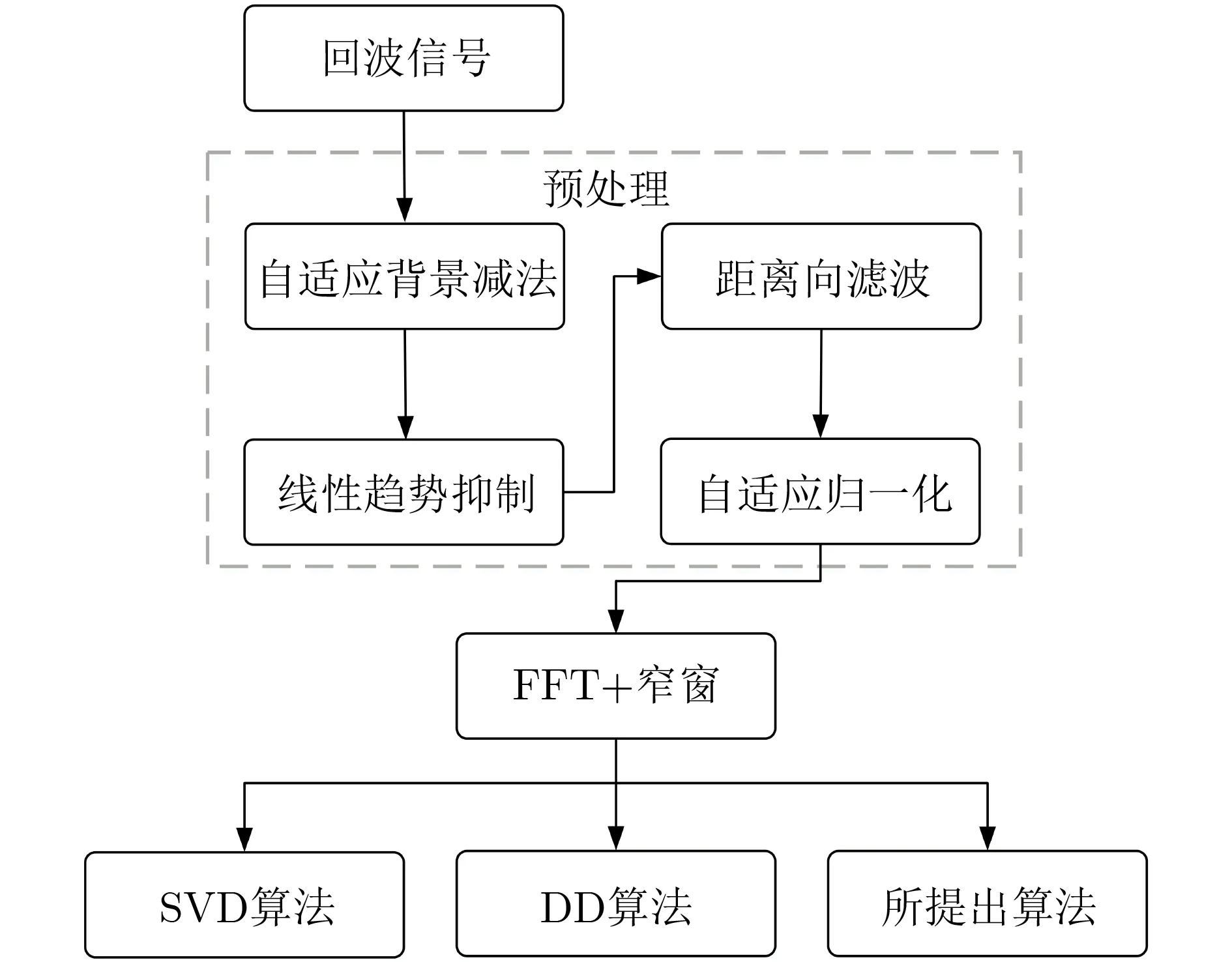
图1 呼吸检测算法的信号处理流程图

4 仿真与实验结果
4.1 仿真结果
仿真和实验结果验证了所提呼吸信号检测算法的高输出信噪比性能和高效率。所提算法是在配备64 位3.60 GHz CPU的计算机上通过MATLAB代码实现的。

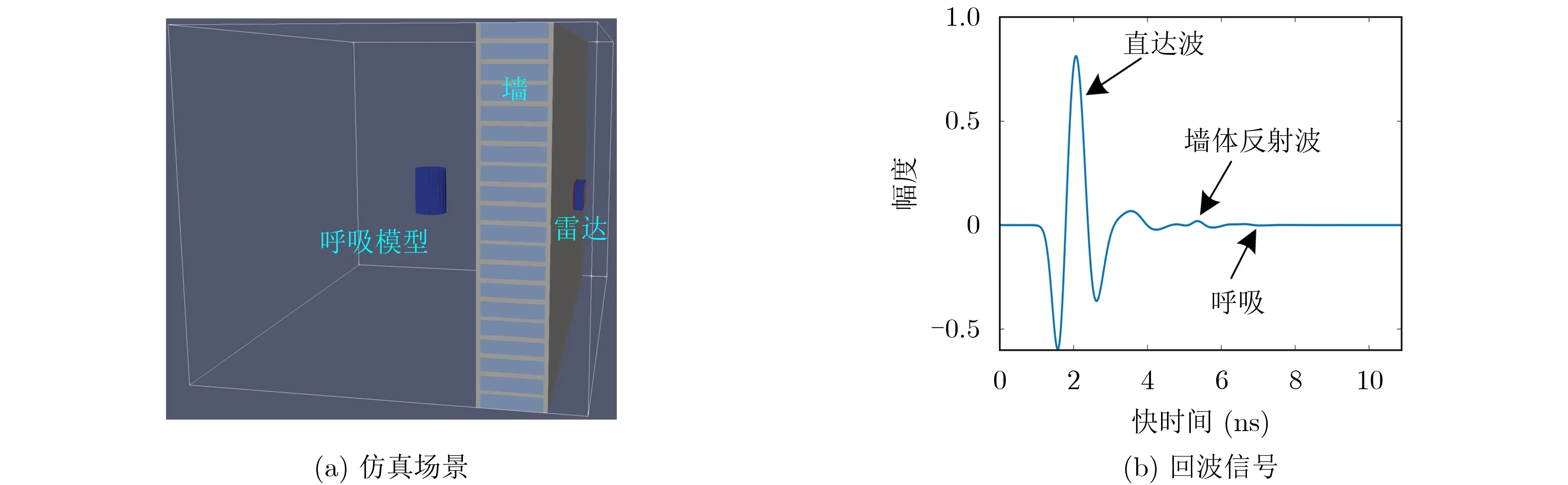
图2 仿真模型
图3给出了在4 dB输入SNR下,经传统FFT算法、SVD算法、DD算法和所提算法处理后的频率-距离结果。在 FFT算法处理结果中,呼吸信号被噪声掩盖。经SVD检测算法处理后,大部分噪声被去除,但与呼吸信号相同频段的噪声仍然存在,这会导致距离向的目标模糊。与SVD算法相比,DD算法可以滤除与呼吸信号相同频段的噪声。然而,由于DD算法的估计参数是固定的,呼吸信号周围仍然存在难以去除的噪声。和DD算法相比,所提出的呼吸信号检测算法可以进一步消除残留噪声,呼吸信号的距离和频率清晰可见。在算法复杂度方面,FFT, SVD和DD算法所需的处理时间分别为0.21 s, 1.82 s和0.98 s。所提呼吸检测算法耗时1.33 s,满足生命检测的实时性要求。
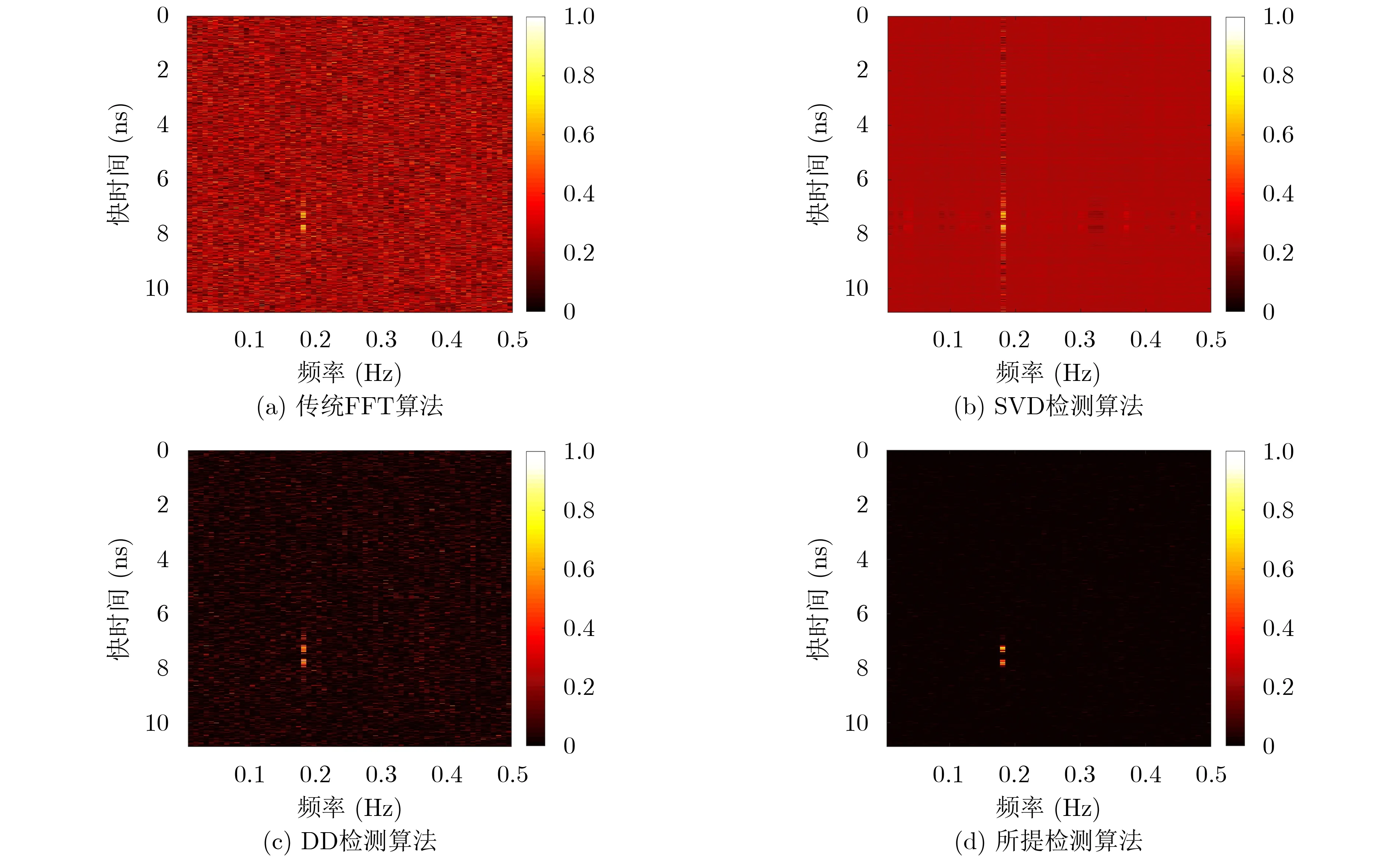
图3 各算法的频率-距离结果
根据检测结果的频率-距离图,采用内窗和外窗的能量来计算目标的信噪比。内矩形窗是用于圈出目标所在区域,外矩形窗的作用是圈出目标附近范围的噪声。定义呼吸信号的输出信噪比SNRout为[20]
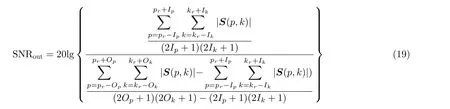
其中,pr和kr是频率-距离矩阵|S(p,k)|中目标所在位置的索引。(2Ip+1)和 (2Ik+1)分别是内矩形窗的长度和宽度,(2Op+1)和(2Ok+1)是外矩形窗的长度和宽度。根据接收数据矩阵在快时间和慢时间的维度,内矩形窗和外矩形窗参数分别设置为Lp=60,Lk=1,Op=120,Ok=2。
图4给出了4种算法在不同输入SNR下的输出SNR结果。无论在低或高的输入SNR下,所提检测算法的输出SNR至少比SVD算法高9 dB。当输入SNR小于13 dB时,DD算法的输出SNR至少比所提算法低5 dB。当输入SNR大于13 dB时,DD算法的输出SNR接近于所提算法,但始终低于所提算法。
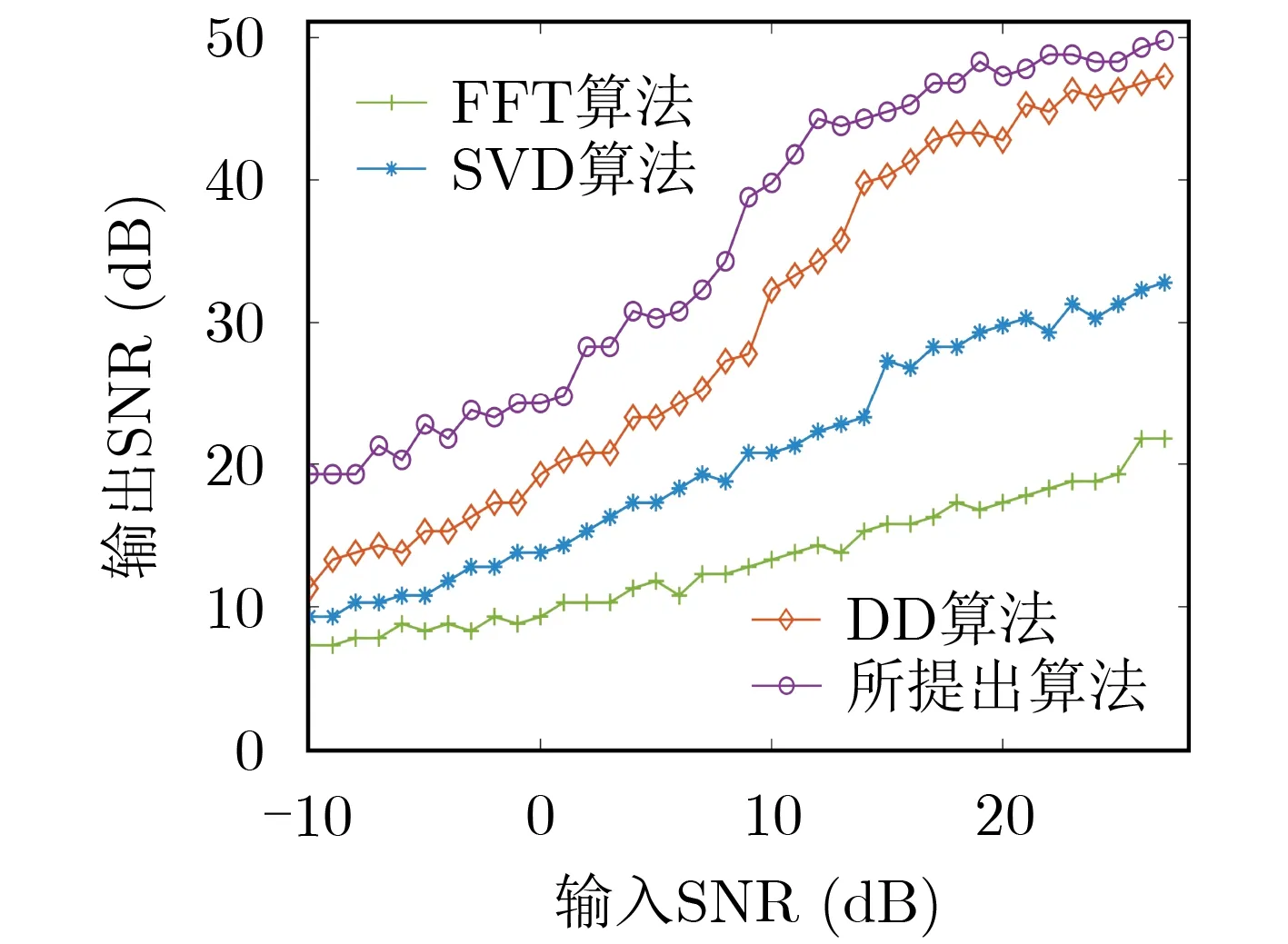
图4 不同输入SNR下4种算法的输出SNR
固定输入SNR为4 dB,不同墙体厚度下呼吸检测的输出SNR结果如表1所示。经过FFT算法处理后,呼吸信号的输出SNR随着墙厚的增加呈线性下降。在不同墙厚下,所提出算法的输出SNR至少比SVD算法高13.3 dB,比DD算法至少高6.49 dB。
表1 不同墙体厚度下的输出SNR (dB)
4.2 实验结果
图5是穿墙呼吸检测的实验场景。使用的UWB雷达包含两个天线,封装在一个45 cm×22 cm×45 cm的盒子中,通过WiFi进行数据传输。雷达参数见表2。为满足紧急救援的实时性要求,呼吸检测采用512道回波数据。实验场地为体育馆,墙体厚度为37 cm。墙后有两个静止的人体目标,距离分别为7 m和10 m。在进行人体目标检测之前,信标仪已被用于校准雷达的距离和频率误差[4]。

表2 UWB雷达参数
图5 穿墙人体呼吸检测实验场景
实验数据矩阵的快时间和慢时间维度分别为2455和313。图6给出了穿墙呼吸信号经过4种检测算法处理后的频率-距离检测结果。FFT算法处理后的结果如图6(a)所示,呼吸信号淹没在噪声中。经SVD算法检测后的结果如图6(b)所示,大部分噪声可以去除,但与呼吸信号同频段的噪声仍然无法消除。图6(c)是经过DD算法处理后的结果,与呼吸信号同频段的噪声被抑制,但频率-距离图像中仍有残留噪声。经所提出算法检测后的结果如图6(d)所示,与DD算法相比,噪声得到进一步消除,呼吸信号清晰可见。

图6 各算法的实验结果
图7分别给出了呼吸信号在频率和距离维度上的投影结果。在SVD算法中,与目标相同频段的噪声没有被消除,导致目标2被噪声掩盖,在频率投影中难以识别。与SVD算法相比,DD算法在频率维度投影结果中可以将两个目标分开,但噪声幅度仍然较高。所提出的算法在两个维度上都具有最低的投影噪声强度,目标的频率和距离清晰可见。目标1的实测距离为7 m,呼吸频率为0.22 Hz,目标2的实测距离为10 m,呼吸频率为0.18 Hz。
图7 频率-距离图像的投影结果
实验数据中目标的输出信噪比可通过式(19)求解,内外矩形窗的参数和仿真数据相同。根据5组实验的平均值,4种算法得到的两个目标的输出SNR如表3所示。经过所提出算法处理后,目标1的输出SNR为21.68 dB,比SVD算法高11.38 dB,比DD算法高6.79 dB。目标2的输出SNR为18.73 dB,比SVD高10.00 dB,比DD算法高6.34 dB。实验结果进一步验证了所提算法的优越性。
表3 两个静止目标的输出SNR (dB)
5 结束语
本文提出一种基于先验信噪比估计的穿墙呼吸信号检测算法。通过MMSE计算自适应估计因子以降低先验信噪比的估计误差,进一步消除了残余随机噪声。在相同条件下,gprMax仿真和实验穿墙数据结果表明,与SVD算法相比,本文算法能够去除与呼吸信号相同频段的噪声。与传统DD算法相比,本文算法能够进一步去除残留随机噪声。此外,所提算法还对低输入信噪比和不同的墙厚具有鲁棒性。本文算法的计算时间为1.33 s,可以满足实际应用的要求。
