一种基于分布式穿墙雷达的复杂条件下人体目标检测方法
2022-04-21叶盛波倪志康郑之杰方广有
史 城 叶盛波 潘 俊 倪志康 郑之杰 方广有*
①(中国科学院空天信息创新研究院 北京 100094)
②(中国科学院电磁辐射与探测技术重点实验室 北京 100094)
③(中国科学院大学电子电气与通信工程学院 北京 100049)
1 引言
超宽带(Ultra-WideBand, UWB)雷达具有穿透性强、距离分辨率高和抗干扰性强等特点,被广泛应用于探地、穿墙成像和灾后救援中[1–3]。UWB雷达可分为不同体制,包括无载频脉冲雷达[4]、伪随机编码雷达[5]、调频连续波雷达[6]和频率步进雷达[7]。无载频脉冲雷达因结构简单、成本低、功率损耗低等优势得到了广泛发展。UWB雷达通过识别人体呼吸等微动在雷达回波信号中产生的多普勒效应对人体目标进行检测和定位。通过选择合适的频段,UWB雷达可以穿透障碍物,在非可视条件下,对人体进行检测。
然而,在实际的生命探测过程中,人体目标雷达散射截面积小、障碍物能量衰减大等因素都容易使得UWB雷达接收的信号信噪比(Signal-to-Noise Ratio, SNR)较低。低SNR条件下的呼吸信号提取是一个巨大的挑战。许多研究人员提出了不同的低SNR条件下的呼吸检测方法。Li等人[8]设计了一款双频的UWB脉冲雷达,利用低频对胸腔微弱移动的不敏感性来抑制类呼吸杂波。Xu等人[9]基于高阶累积量对高斯噪声的不敏感特性,提出了一种利用高阶累积量抑制噪声的呼吸检测方法。Nezirovic等人[10]对呼吸检测算法进行了完善,通过引入奇异值分解(Singular Value Decomposition, SVD),一方面可以减弱高斯白噪声,另一方面可以抑制动态杂波。上述方法都是基于单节点雷达实施的,在实际探测中,存在探测张角小、探测距离近等问题,探测性能受限。多输入多输出(Multiple-Input Multiple-Output, MIMO)体制的线阵或面阵雷达可实现目标成像和多维定位,但是其系统复杂度高,体积大,质量重,限制了在废墟救援领域中的实际应用。分布式雷达系统利用多台雷达进行协同操作,一方面单台雷达体积小,质量轻,提升了在救援过程中的便携性;另一方面,可以灵活改变定位基线长度,实现目标的高精度定位。Kocur等人[11]基于两台一发两收的穿墙雷达实现了复杂环境下的高精度运动人体跟踪。Narayanan等人[12]利用分布式穿墙雷达实现了多目标的穿墙成像,降低了鬼影的产生。Jia等人[13]基于双站频率步进雷达,利用相关系数矩阵,实现了多个静止人体目标的检测,但是,在远距离探测时,由于路径传播过程中能量的衰减,目标SNR较低,仅仅依靠相关系数矩阵难以检测到目标。
本文基于分布式穿墙雷达系统,即采用两台雷达对同一探测区域进行探测,提出一种低SNR条件下的人体目标自动检测方法。首先,两台雷达按照提前设定的时间片方案,分时交替工作,从而避免雷达间的互相干扰。在雷达回波经过相应的预处理后,对两台雷达回波数据进行慢时间维度上的互相关操作,使人体呼吸信号得到增强,噪声信号得到抑制,同时利用快速傅里叶变换(Fast Fourier Transform, FFT)对慢时间维度的呼吸能量进行积累,进一步提高回波数据的SNR。其次,本文对常用于单台雷达的恒虚警率(Constant False Alarm Rate, CFAR)检测进行了修改,使其适配于分布式穿墙雷达,从而实现人体呼吸信号的快速、自动检测。最后,利用三角定位方法实现被困人员的2维定位。在多个低SNR环境下进行了实验,包括空气中的远距离探测实验、穿透多层介质探测实验、模拟废墟探测实验和穿墙多目标探测实验。实验结果表明,本文所提方法可以在低SNR条件下实现人体的检测,其探测性能优于单台雷达。
2 时域呼吸信号模型
3 分布式穿墙雷达系统
分布式穿墙雷达系统由两台雷达主机和数据融合平台组成。雷达主机对区域进行探测,并将回波数据上传给数据融合平台。数据融合平台对两台雷达测得的数据进行解析,并将探测结果输出。单台雷达主机结构框图如图2所示。发射机为基于阶跃恢复二极管的脉冲源,其可产生中心频率为500 MHz的高斯脉冲信号。接收机采用等效采样技术,实现了16 GHz的等效采样率。来自接收天线的信号依次经过低噪声放大器(Low Noise Amplifier, LNA)和低通滤波器(Low-Pass Filter, LPF)处理后,被16位的模数转换器(Analog to Digital Converter,ADC)采集记录。ADC具有最大160 Mbps的采样率和1.4 GHz的全功率带宽。可编程延时线芯片为ADC的采样时钟提供精确的延时,其能实现最大5 ns,增量为5 ps的延时。现场可编程逻辑门阵列(Field Programmable Gate Array, FPGA)用于控制整台雷达主机,并且为发射机提供触发信号。时钟模块为整个系统提供同步的时钟信号。一对领结天线用于电磁波的发射和接收。
为了防止两台雷达同时工作产生电磁干扰,我们利用时分复用(Time Division Multiplexing, TDM)技术,即任意时刻只有单台雷达进行探测工作,不同雷达按照提前划分的时间片交替工作。分布式穿墙雷达系统的时序图如图3所示。首先,每台雷达通过自组网设备与数据融合平台建立无线链路连接;当下达“开始探测”命令后,数据融合平台下发同步指令和时间片分配方案,每台雷达收到同步指令后,进行本地时钟同步,并按照时间片依次工作;每个雷达节点完成一次探测后将回波数据实时上传到数据融合平台,并等待下次探测;最后,数据融合平台依据两台雷达回波数据,提取目标位置信息并输出。分布式穿墙雷达参数见表1。

表1 分布式穿墙雷达参数

图3 分布式穿墙雷达系统时序图
4 所提出的人体目标检测方法
本文提出的复杂环境下的人体目标检测方法流程图如图4所示。此方法主要包括4部分:(1)预处理, (2)目标增强, (3)目标提取, (4)目标定位。首先,在步骤(1)中,对两台雷达接收的回波数据进行预处理,包括背景移除、滤波、自动归一化等操作;然后,在步骤(2)中,对不同雷达接收的回波进行慢时间互相关操作,使得周期性的呼吸信号得到增强,非周期的噪声信号得到抑制,同时,利用FFT对多个周期的呼吸信号进行能量积累,进一步增加信噪比。为了降低运算量,我们用频域相乘代替时域互相关;其次,在步骤(3)中,通过适配于分布式穿墙雷达的CFAR检测和聚类的方法,对感兴趣的呼吸信号进行提取;最后,在步骤(4)中,利用三角定位方法对人体进行2维定位。
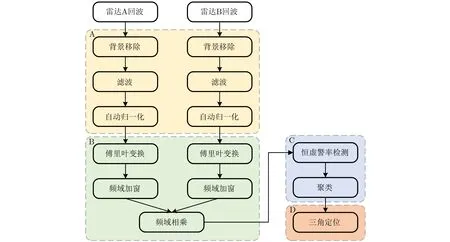
图4 所提出的人体目标检测方法流程图
4.1 步骤(1):预处理
由图1(b)可以发现,人体呼吸信号通常湮没在能量很强的墙体等背景回波中,因此,首先需要将背景信息从接收数据中去除。当依赖呼吸引起的胸腔位移进行人体检测时,人体回波信号有着近似的时延,容易被误认为背景信息。为了克服上述缺点,我们采用基于指数平均的自适应背景减法(Adaptive Background Subtraction, ABS), 其中,权重因子α用权重矢量λ来代替。

图1 时域呼吸信号模型

其中,pn[m]表示当前的背景估计,qn[m]表示接收的雷达回波。当前帧的背景估计由前一帧的背景估计和当前帧的回波数据组成。权重矢量λ的大小为M×1,由两种设定的阈值决定[15]。
为了进一步提高SNR,一个带通滤波器作用于雷达回波的距离(等同于快时间)维度,来滤除掉过采样引入的高频噪声。带通滤波器的带宽与发射信号的带宽保持一致。
由于目标所处位置越远,散射回的能量越弱,因此引入自动归一化算法对远距离处的目标进行增强[16]。其基本思想是在时间段[t1,te]内寻找信号幅度最大值对应的采样时刻tm,并依次改变时间段,往后顺序寻找最大值。其中,t1表示快时间的第1个采样时刻,te表示快时间的最后一个采样时刻。
4.2 步骤(2):目标增强
4.3 步骤(3):目标提取
呼吸信号检测中常用的基于CFAR和聚类的自动提取方法[17]并不能直接应用于分布式穿墙雷达系统的3维矩阵雷达回波,本文对其进行了修改,使其适配于分布式雷达系统。
首先对步骤(2)获得的结果矩阵Y˜AB(mA,mB,nf)进行频率维度的压缩,得到M×M的2维矩阵R˜,其两个维度的信息分别表示目标与两台雷达的距离。然后根据呼吸信号在距离-距离矩阵R˜中的表现特征,通过计算R˜中各数据的局部对比度,实现恒定虚警率处理[17]。本文所提出的CFAR能量窗如图5(a)所示,由3个窗体组成:内窗、警戒窗和外窗。其中内窗为对称的十字窗体,警戒窗和外窗为方形窗。Il为内窗的十字长度,设置为Il= 11。Iw为内窗的十字宽度,设置为Iw= 5。警戒窗稍大于内窗,外窗设计大于警戒窗,一般将警戒窗边长Gl设置为Gl=Il+4,外窗边长Ol设置为Ol=Gl+6。
一个典型的包含呼吸信号的距离-距离矩阵R˜如图5(b)所示,CFAR内窗完全覆盖了呼吸信号特征数据,而CFAR外窗包括了局部背景信息。用EI,EG和E分别表示内窗、警戒窗和外窗的能量,局部能量比定义为

在距离-距离矩阵R˜ 上,依次滑动CFAR窗,计算每个位置的局部能量比值。图5(b)所示的情况下,局部能量比达到最大。当局部能量比大于检测阈值Tr时,此位置被标记为呼吸特征点。矩阵R˜被全部扫描后,采用聚类的方法精简所有的呼吸特征点,提取呼吸信号的两个距离信息。
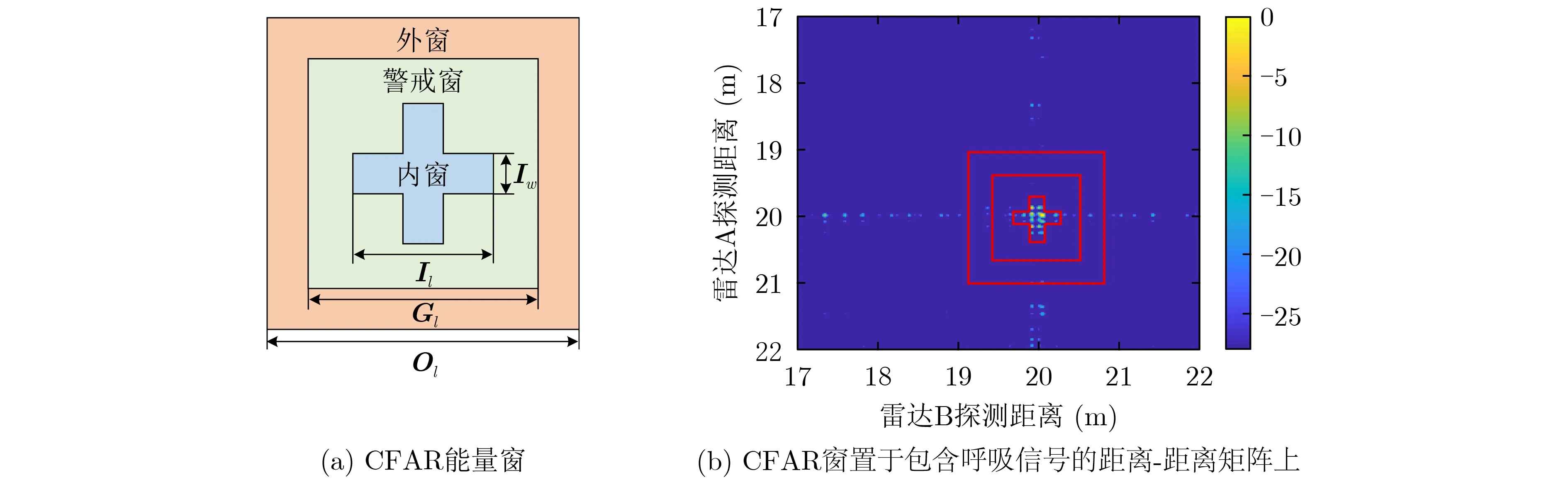
图5 适配于分布式穿墙雷达的CFAR能量窗
4.4 步骤(4):目标定位
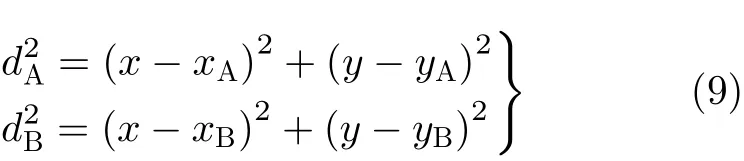
经过步骤(3)处理后,可得到目标与雷达A的距离dA和目标与雷达B的距离dB。由于两台雷达自身位置已知,通过三角定位算法,可实现目标的2维定位。假设雷达A坐标为(xA,yA),雷达B坐标为(xB,yB),那么,目标的坐标(x,y)可通过求解式(9)方程组得到
5 实验结果
为了验证所提方法的有效性,我们利用研制的分布式穿墙雷达,于中国科学院空天信息创新研究院和国家地震紧急救援训练基地进行了一系列低SNR条件下的人体探测实验,包括空气中远距离探测实验、穿透多层介质探测实验、穿透废墟探测实验和穿墙多目标探测实验。
空气中远距离探测实验场景如图6(a)所示,两台雷达分别置于高度为1 m,间隔为1.5 m的架子上,取两台雷达中心为坐标原点,被测人员静止站立于(0 m, 40 m)处平稳呼吸。图6(b)和图6(c)分别表示每台雷达单独利用文献[17]方法进行目标检测时的处理结果,其中红点表示算法提取的呼吸信息。可以发现由于人体离雷达位置较远,散射的电磁波能量较弱,无法在40 m处看到呼吸信号特征,并且输出了虚假目标。图6(d)表示本文方法得到的距离-距离矩阵R˜。图6(e)表示经过步骤(3)处理后得到的结果,呼吸特征点数值为1,红点表示算法提取的呼吸信息。图6(f)表示输出的目标定位结果,输出坐标为(0.5 m, 39.9 m)。可以看到,所提方法正确提取了目标的位置信息,并输出了目标的2维定位结果,距离向误差为10 cm,方位向误差为50 cm。

图6 空气中远距离探测实验结果
另外,本文与文献[13]方法进行了对比。文献[13]采用相关系数矩阵的方法,提取两台雷达采集数据中高度相关的呼吸信号。图7(a)表示其生成的相关系数矩阵,图7(b)表示CFAR提取结果。由图7可以看到,当目标处于远距离时,目标散射回的能量较低,仅仅依靠相关系数矩阵,数据中仍然包含大量的噪声信号,无法正确检测到目标。我们所提出的方法不仅利用了目标的呼吸信号在不同雷达数据中的高度相关性,还利用FFT对多个周期的呼吸信号进行了能量积累,使得雷达数据的信噪比得到提高。

图7 文献[13]的方法处理结果
穿透多层介质探测实验场景如图8(a)所示。墙体总厚度为90 cm,由3种厚度为30 cm的标准介质(松木板、预制板、红砖)组成。两台雷达分别置于高度为1 m,间隔为1.5 m的架子上,同样取两台雷达中心为坐标原点,被测人员静止站立于(0 m, 20 m)处平稳呼吸。从图8(b)—(f)表示的处理结果可以看到,由于多层介质对电磁波能量的衰减,雷达回波SNR同样很低,只依靠单台雷达不能准确识别出目标位置。经过我们所提方法处理后,SNR得到提高,输出目标坐标为(–0.3 m, 20.1 m)。

图8 穿透多层介质探测实验结果
穿透废墟探测实验场景如图9(a)所示,其为一幢模拟震后的倒塌建筑,内部存有大量钢筋、石块和木材等障碍物。两台雷达置于废墟顶层,间隔2 m放置。被测人员藏于废墟内(–1.1 m, 3.9 m)处平稳呼吸。从图9(b)—(f)表示的处理结果可以看到,在多种障碍物的衰减和散射作用下,雷达接收回波的SNR进一步降低,单台雷达无法准确输出位置。而我们所提出的方法仍表现出了良好的探测性能,得到目标坐标为(–1.6 m, 4.1 m),误差在可接受范围内。
图9 穿透废墟探测实验结果
穿墙多目标探测实验场景如图10(a)所示。墙体为标准“三七”墙。两台雷达分别置于高度为1 m,间隔为2 m的架子上,同样取两台雷达中心为坐标原点,3名待测人员分别静止站立于(1 m, 5 m),(–1 m, 7 m)和(0 m, 9 m)处平稳呼吸。从图10(b)—(f)表示的处理结果可以看到,由于不同目标在距离和呼吸幅度等方面存在差异,不同目标散射回的信号能量强度也有所不同,每台雷达单独利用文献[17]方法进行处理后,存在虚警、漏警的情况。而本文方法检测出了全部的人体目标,这是因为不同雷达对同一呼吸目标采集的数据具有高度相关性,使得每个目标信号的信噪比得到增强。目标输出坐标分别为(0.95 m,4.99 m),(–1.07 m, 7.03 m)和(0.03 m, 9.10 m),平均定位误差为0.08 m。
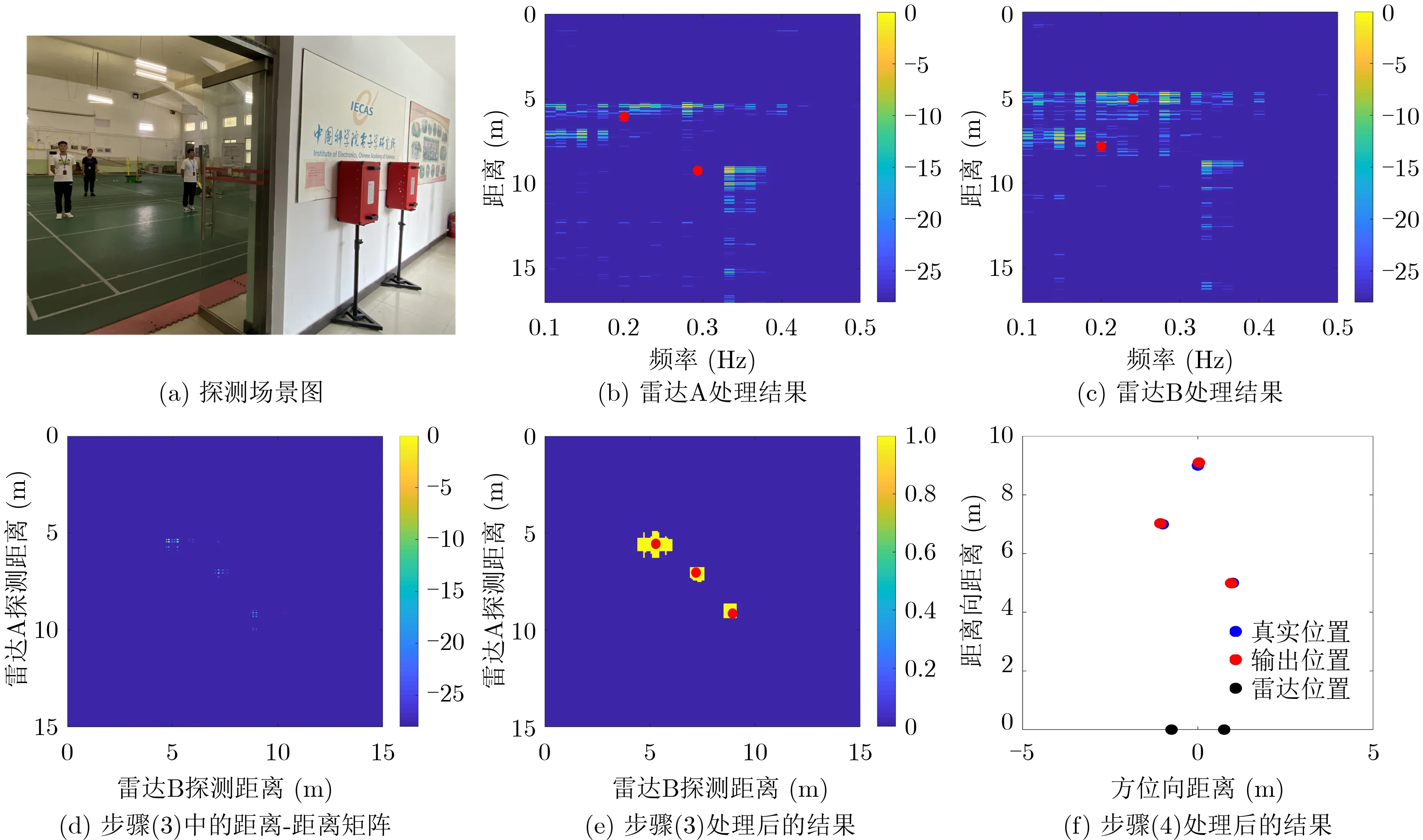
图10 穿墙多目标探测实验结果
上述所有实验的数据均是在计算机上利用MATLAB软件进行处理。计算机配置AMD Ryzen 5处理器和32 GB内存。在探测距离为20 m的情况下,不同算法的运行时间对比如表2所示。其中算法A表示直接在慢时间域进行互相关操作,然后进行FFT处理。从表2可以得到,文献[13]中基于相关系数的算法运行时间为1.01 s。由于需要对所有距离单元遍历进行互相关处理,算法A的运算时间最长,为112.19 s。而本文方法先进行FFT处理,用频域相乘代替时域的互相关操作,相比于算法A大大减小了运算量,运算时间为3.27 s,虽然用时略高于文献[13]算法,但是满足数据实时处理的要求。

表2 不同算法的运行时间对比(s)
6 结束语
本文基于分布式穿墙雷达,提出了一种适用于复杂环境下的人体目标检测算法。通过两台雷达回波数据的慢时间互相关操作,可使得微弱的呼吸信号得到增强;基于修改后的CFAR检测,可实现人体目标的自动提取。一系列低SNR条件下的实验验证了我们所提方法的有效性,相比于单台雷达,探测性能得到了提升。下一步将进行更多数量的雷达融合和墙体参数估计方法的研究,以实现人体目标的3维定位和更高的定位精度。
