电力电子变压器公共冗余结构及容错控制策略
2022-04-14韩杰祥徐可寒尹项根
韩杰祥,张 哲,徐可寒,尹项根
(华中科技大学 强电磁工程与新技术国家重点实验室,湖北 武汉 430074)
0 引言
近年来,交直流混合配电网因其良好的分布式能源消纳能力和直流负荷匹配性能而受到广泛关注[1]。电力电子变压器(PET)是交直流混合配电网中的关键互联设备。与传统工频变压器相比,PET 能有效减小设备体积和重量,并具备电能变换、交直流互联、潮流控制、无功补偿、电能质量调节等功能[2-5]。但是,由于PET 采用了大量电力电子器件,其内部故障概率相对较高[6]。PET 子模块(SM)故障不但会威胁其自身安全,而且会对交直流混合配电网造成谐波污染和功率振荡,严重劣化电能质量,影响电网运行稳定性与供电可靠性。
冗余结构设计和容错控制策略能够在子模块故障期间维持PET可靠运行,是突破PET脆弱性瓶颈、更好满足工程化应用要求的重要措施。PET 根据结构特点,可以划分为基于模块化多电平换流器(MMC)和级联H 桥(CHB)这2 种基本结构类型[7]。MMC 型PET 具备中压直流母线,主要用于构建中压直流配电网,其子模块结构简单,实现全局冗余热备用运行时设备利用率高,成本增加不明显[8]。CHB 型PET直接面向用户,级联子模块数较少,子模块故障将造成PET 结构严重不对称,极大劣化整体运行性能。另外,CHB型PET的子模块构造复杂,采用分相冗余设计成本高,且冗余模块利用率低。因此,如何通过合理的冗余结构设计和容错控制提高CHB 型PET的可靠性受到了更多关注。文献[9-10]研究了CHB子模块故障造成三相桥臂结构不对称时的容错控制策略,但是三相桥臂需按照分相冗余设计,增加了设备制造成本。文献[11]提出了单相CHB 型PET 的冗余结构和容错控制策略,但是将该结构拓展应用于三相PET时,也相当于分相冗余设计,无法满足经济性要求。文献[6,12]提出了单子模块公共冗余结构及容错控制策略,但是该结构仅能应对单子模块故障,容错能力有限。文献[13]将单子模块公共冗余结构用于CHB 型PET,但是冗余子模块运行于冷备用状态,在切换过程中可能产生较大的暂态冲击。文献[14]针对CHB 型PET,提出单子模块和双子模块2 种冗余结构,但是冗余子模块与主电路子模块在前级变换器拓扑结构方面存在差异,冗余模块切换操作较复杂,且不利于设备制造和故障更换。
针对CHB 型PET 在冗余结构设计和容错控制策略研究中存在的不足,本文提出一种双子模块公共冗余结构及相应的容错控制策略,并从可靠性和经济性角度,与采用其他冗余结构的PET 进行对比分析。本文所提冗余结构在PET发生任意单子模块故障和双子模块故障情况下均可实现备用功能。在控制成本的前提下,冗余子模块利用率和PET 运行可靠性得到显著提高。最后,通过仿真实验验证了该冗余结构和容错控制策略的正确性和有效性。
1 CHB型PET基本原理
CHB 型PET 拓扑结构见图1。图中,Lm为滤波电感;SMaj、SMbj和SMcj(j=1,2,…,N)分别为A 相、B相和C 相的第j个子模块,N为各相级联子模块数。PET 交流侧采用星形连接的CHB 结构,直流侧三相子模块统一并联形成直流端口。图2 为PET 子模块拓扑结构。图中,子模块旁路开关可用于旁路故障子模块;前级H桥(HB)可实现双向AC/DC变换;中间级双有源桥(DAB)采用谐振型双向DC/DC 变换器,其双侧HB通过高频变压器(HFT)互联,将直流电压调制成高频方波,经谐振环节实现功率传递[15]。

图1 CHB型PET拓扑结构Fig.1 Topology of CHB typed PET

图2 PET子模块拓扑结构Fig.2 Topology of PET’s SM
PET 一般采用双闭环控制,根据不同应用需求,采用有功/电压外环,工作于定功率或定电压2 种控制模式,实现交直流电网之间的潮流控制或直流配电网电压调节[16]。在2 种控制模式下,PET 均可实现功率双向流动,根据交直流配电网功率供求状况进行快速灵活调节。电流内环通过前馈控制实现dq解耦,给定调制电压指令值。
2 公共冗余结构及容错控制策略
冗余结构设计是应对PET子模块故障的有效措施,但是单子模块公共冗余结构容错能力有限,分相冗余结构制造成本过高。本文从兼顾设备可靠性和经济性的角度,提出双子模块公共冗余结构及相应的容错控制策略。
2.1 拓扑结构设计
变压器有载调压的无触点连接方式对冗余结构设计具有一定的参考作用。有载调压利用电力电子开关实现调压绕组的投切,从而灵活调节变压器有效匝数[17]。然而,有载调压系统的各相分接头连接开关需独立设计,调压绕组无需在三相之间进行切换;在各相绕组内部,不同调压绕组的接入方式也相对固定。与采用有载调压的分接头连接方式相比,冗余结构设计的难点在于冗余子模块在三相之间公共备用功能的实现,以及各冗余子模块之间连接方式的灵活变换。
利用公共冗余结构实现任意单子模块和双子模块故障情况下的备用功能,需要解决以下关键问题:①单子模块故障时,实现冗余子模块在各相间的公共备用功能;②同相双子模块故障时,实现2 个冗余子模块的串联备用功能;③异相双子模块故障时,实现2 个冗余子模块的分相备用功能;④控制灵活方便,运行稳定可靠,易于更换维修。
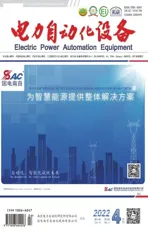
为此,本文提出一种双子模块公共冗余拓扑结构,如图3所示。图中,RM1和RM2为冗余子模块,其结构与图2所示的PET主电路子模块拓扑结构相同,能够在容错运行期间保证PET 三相级联结构对称,以简化控制策略,且易于冗余模块的制造和更换。
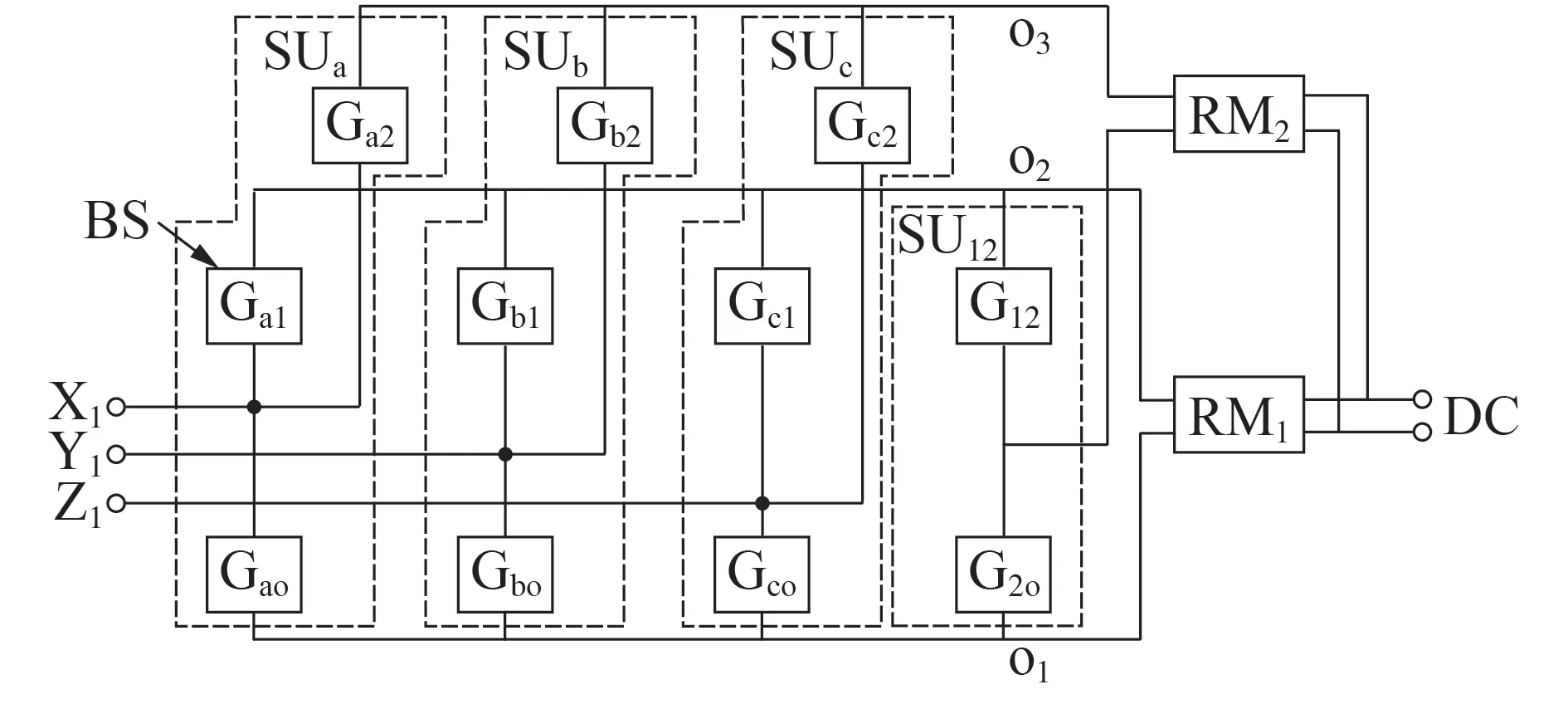
图3 双子模块公共冗余拓扑结构Fig.3 Topology of dual-SM communal redundant
RM1和RM2的投退及其在三相之间的切换通过图3中的开关组(SU)实现。SUa、SUb和SUc分别为A 相、B 相和C 相开关组。每个开关组包含3 个可控双向开关(BS),即Gxo、Gx1和Gx2(x=a,b,c)。这3 个BS 采用星形连接,其公共连接点接于PET 三相级联桥臂,其他3 个端口分别接于RM1、RM2和中性点。图3中,Gao、Gbo和Gco为各相中性点连接控制开关,可用于调节冗余子模块的投退;Ga1、Gb1和Gc1为RM1投入各相的控制开关,Ga2、Gb2和Gc2为RM2投入各相的控制开关,控制开关能够灵活调节冗余子模块投入相应级联桥臂,实现冗余模块的公共备用功能。
2 个冗余子模块连接方式的切换通过图3 中的SU12控制。其中,G2o为RM2中性点连接控制开关,控制RM2独立投入级联桥臂,实现双子模块的分相备用功能;G12为RM1和RM2的串联控制开关,实现RM1和RM2的串联备用功能。
需要指出的是,图3 中的冗余结构具有良好的可拓展性。以上述设计原则为指导,可以得到多子模块冗余结构如附录A 图A1 所示,图中包含q个冗余子模块。对于双子模块冗余的情况,即只存在RM1和RM2,图A1 与图3 中的结构相同。当冗余结构拓展到n个冗余子模块时,只需要增加子模块投入开关Gaq、Gbq和Gcq,同时,在RMq和RMq-1之间增加中性点连接控制开关Gqo以及串联控制开关Gq-1,q。
鉴于3 个及以上子模块同时发生故障的概率较低,从兼顾设备成本和运行可靠性角度,本文重点以双子模块公共冗余结构为例进行研究,相关结论同样可拓展应用于多子模块冗余结构。采用图3 所示双子模块公共冗余结构的PET 拓扑结构见图4。图中,冗余模块交流端口X1、Y1和Z1分别接入PET三相桥臂,冗余模块直流端口与PET直流端口并联。
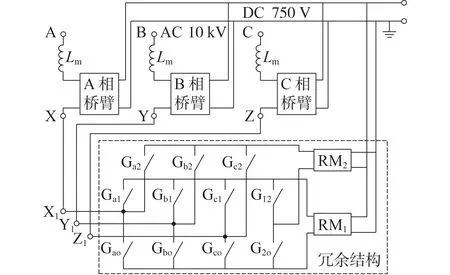
图4 双子模块公共冗余PET拓扑结构Fig.4 Topology of dual-SM communal redundant PET
冷备用子模块在投入运行过程中存在软启动、暂态过流等问题。此外,冗余子模块因其公共备用功能而不能直接投入主电路以热备用状态运行。为此,在PET 正常运行时,RM1和RM2的前级HB 闭锁,DAB 正常触发,将其电容电压维持在额定值附近。因此,当冗余子模块投入主回路并收到HB 触发信号时,可迅速进入工作状态,从而避免运行模式切换过程中的暂态冲击。
2.2 冗余结构工作模式控制
通过调节图3 所示的双子模块公共冗余结构中BS 的状态,可控制其工作于正常运行模式、单子模块投入模式、双子模块同相串联投入模式和双子模块分相投入模式这4种模式。
1)模式1:正常运行模式。
当PET 三相主电路子模块正常运行时,触发三相中性点控制开关Gao、Gbo和Gco,为三相级联桥臂提供中性点,其余BS 断开。BS 状态如附录A 表A1 中S1对应的状态所示。表中,“1”表示开关导通,“0”表示开关断开。当中性点控制开关发生故障时,亦可触发Ga1、Gb1、Gc1或Ga2、Gb2、Gc2,以图3 中o2或o3为中性点,从而提高可靠性,相应的BS 状态如表A1 中S2和S3对应的状态所示。
2)模式2:单子模块投入模式。
PET 某一相单个子模块发生故障情况下,应隔离故障子模块并投入冗余子模块,维持PET 整体系统可靠运行。单子模块投入运行模式下,需闭合RM1投入控制开关,并断开故障相中性点连接控制开关。以A 相为例,闭合Ga1,断开Gao,将RM1投入A相桥臂,BS 状态如表A1 中S4对应的状态所示。在RM1故障情况下,亦可将RM2投入A 相,作为后备,以提高运行可靠性。S4的后备方案所对应的BS 状态如表A1中S5—S8对应的状态所示。
3)模式3:双子模块同相串联投入模式。
当某一相发生双子模块故障时,需要将2 个冗余子模块串联投入故障相。闭合RM2投入控制开关和子模块串联控制开关,断开故障相中性点连接控制开关,即可运行于双子模块同相串联投入模式。以A 相为例,闭合Ga2和G12,断开Gao,则RM1和RM2串联投入A相桥臂,BS状态如表A1中S9对应的状态所示。该状态下BS 发生故障时,可由表A1 中S10对应的状态作为后备。
4)模式4:双子模块分相投入模式。
PET 不同相的子模块发生故障时,需要将RM1和RM2分别投入故障子模块所在相。在双子模块分相投入模式下,应闭合其中一相的RM1投入控制开关,并闭合另一相的RM2投入控制开关及中性点连接控制开关G2o,然后断开2 个故障相的中性点控制开关。以A 相和B 相子模块故障为例,闭合Ga1、Gb2和G2o,断开Gao和Gbo,则RM1和RM2分别投入A 相和B 相桥臂,BS 状态如表A1 中S11对应的状态所示。S12对应的状态为S11开关组故障下的后备状态。
以表A1中4种工作模式的S1、S4、S9和S11对应的主工作状态为例,其工作电路见附录A 图A2。由图可见,双子模块公共冗余结构能够在任意单子模块和双子模块发生故障时实现公共备用和灵活投切。
2.3 容错控制策略
PET 故障子模块的检测与定位是容错控制的前提,目前已有研究学者开展了较全面的研究[18-19]。故障子模块定位后,首先闭合故障子模块旁路开关并闭锁DAB,将故障子模块从系统中隔离。然后,结合冗余结构的运行状态,进行运行模式切换及控制。
1)容错控制流程。
双子模块公共冗余型PET的容错控制流程如附录A 图A3 所示。PET 的工作状态正常时,冗余结构中性点连接开关导通,其他开关断开,运行于正常模式;检测到某个子模块故障时,根据故障定位结果,导通故障相RM1投入控制开关,并断开故障子模块所在相的中性点连接控制开关,冗余结构从正常运行模式切换至单子模块投入模式运行。
模式切换开关控制不当可能会引起过电压。以A相为例,PET的单相数学模型为:

式中:usa为系统电压;uaj为PET 的A 相第j个子模块的输出电压;ia为A相电流。
在模式切换过程中,如果首先断开中性点控制开关,则电流通路将被截断。由式(1)可知,此时电感可能产生过电压。因此,BS 需要遵循一定的开关顺序,即冗余子模块投入BS 首先导通,然后将待关断的BS 断开。此时,已经闭合的BS 就能够和冗余子模块的续流二极管一起提供续流通路,以子模块电容构成吸收电路,避免回路电感产生过电压。切换完成后,触发冗余子模块,进入正常工作状态。以上述RM1投入过程为例,其切换过程及续流通路如附录A图A4所示。
在单子模块投入工作模式下,如果PET 子模块再次发生故障,则冗余结构切换至双子模块投入模式。如果故障子模块与首次发生故障的子模块同相,则冗余结构切换至双子模块同相串联投入模式。此时,应导通故障相RM2控制投入开关和子模块串联控制开关,关断故障相RM1投入控制开关,在RM1投入运行的基础上,将RM2串入故障桥臂。如果故障子模块与首次发生故障的子模块异相,则冗余结构切换至双子模块分相投入模式。此时,应导通RM2中性点连接控制开关及其投入控制开关,并关断故障相中性点连接控制开关,将RM2投入故障相运行。
在双子模块投入运行状态下,如果PET 再次发生子模块故障,则由控制及保护系统发出停机指令,隔离故障PET。
2)容错运行策略。
PET 容错运行策略如附录A 图A5 所示。在不同的工作模式下,将冗余子模块测量信号通过不同通道输入PET 的控制与保护系统,由PET 控制系统对其运行状态进行统一调节。同时,根据故障定位结果和冗余结构运行状态,结合控制系统给出的基本载波和调制波信号,确定冗余子模块的载波和调制波,产生HB 触发脉冲,实现冗余子模块与正常子模块的协调配合运行。
CHB 型PET 一般采用载波移相调制,同一相的子模块载波依次移相π/N,然后与调制波比较得到子模块触发脉冲。根据PET 故障定位结果,冗余子模块在基本载波基础上的移相值Δφc为:
Δφc=(p-1)π/N(2)
式中:p=1,2,…,N,表示故障子模块位置。
根据故障子模块所在相的检测结果,冗余子模块的调制波为:

式中:ur1和ur2分别为RM1和RM2的调制波;kr1和kr2分别为RM1和RM2的调制波系数;urφ(φ=a,b,c)为冗余结构投入相的调制波信号。kr1,kr2∈{1,0,-1},正常运行时,取值为0。对于kr1,在o1做中性点的状态下,取值为1;在o2做后备中性点的状态下,取值为-1,对调制波做反相处理。对于kr2,在o1或o2做中性点的状态下,取值为1;在o3做后备中性点的状态下,取值为-1,对调制波做反相处理。
3 可靠性及成本分析
良好的冗余结构设计需要兼顾设备运行可靠性和经济性的要求。本节根据采用冗余结构的PET的运行特点,从一般性角度,给出了其可靠性和制造成本的评估计算方法。以此为基础,对所提出的冗余结构设计方案的可靠性和经济性进行了分析,并与其他采用不同冗余结构的PET 进行了对比,以验证所提方案的合理性。
3.1 PET可靠性及成本分析
设备可靠性一般按式(4)进行计算。
式中:w为系统子模块数;k为系统维持运行所允许的最多故障子模块数;i为故障子模块数。
在式(4)—(6)的基础上,对本文提出的双子模块公共冗余结构可靠性进行评估。具备该结构的PET 包含无子模块故障、单子模块故障和双子模块故障状态这3种运行状态。
无子模块故障状态下,PET可靠性为:
式中:Rbp和Rbs分别为旁路开关和BS的可靠性。
在可靠性计算过程中(式(7)—(9))考虑了2.2节所提的状态切换开关组的后备功能。综上,图4所示的双子模块公共冗余型PET的可靠性为:

图4 所示的双子模块公共冗余型PET 一次设备制造总成本为:

式中:Csm、Cbp和Cbs分别为子模块、旁路开关和BS 的成本。
子模块成本为:

式中:Cigbt、Cc和Chft分别为IGBT 单元、电容和高频变压器成本。
PET 主要元件的故障率及成本数据见附录A 表A2。表中,IGBT 和电容故障率为实际统计数据[21];高频变压器故障率参考同电压等级PET[22];旁路开关一般选用高可靠性开关,文献[21]按理想开关处理,本文以略低于IGBT 单元的原则对旁路开关的故障率进行合理假设。元件成本按照工程经验选取。
BS 故障率取决于开关类型,可以根据运行可靠性及成本方面的不同需求,选用不同结构的BS。部分BS结构如图5所示。
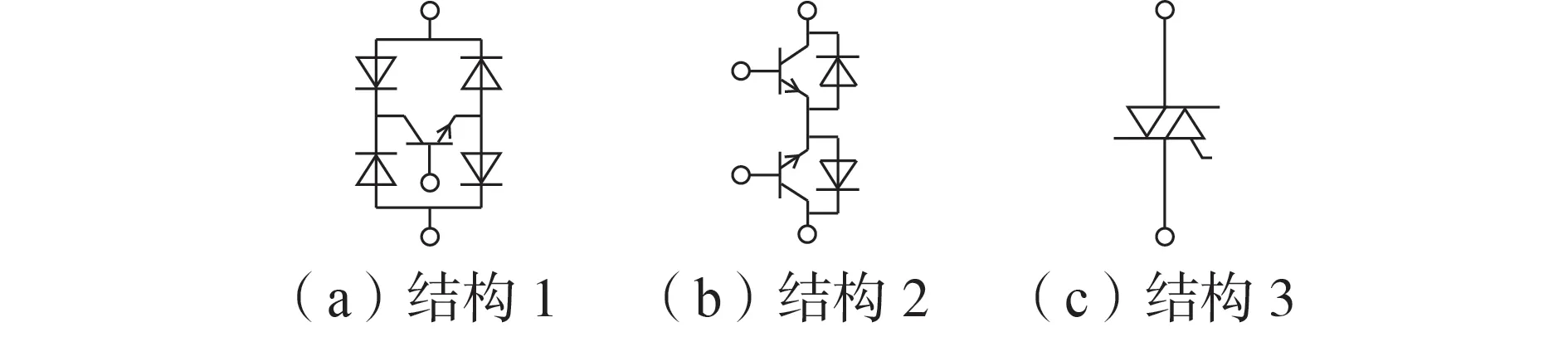
图5 BS拓扑结构Fig.5 Topologies of BS
图5(a)、(b)中BS 采用全控器件构成,控制方便,切换速度快。图5(c)中BS 成本较低,且具有良好的可靠性,但只能在电流过零点时自然关断,切换速度和灵活性难以满足应用要求。相较而言,虽然图5(b)所示的BS的开通损耗较小,但其可靠性有所降低,且成本较高。本文综合考虑控制灵活性、制造成本和运行可靠性,选用图5(a)所示的BS作为冗余结构的切换开关,并以此进行可靠性和成本分析。鉴于二极管运行可靠性远高于IGBT,以略高于IGBT单元的原则对图5(a)所示的BS 的故障率进行合理假设。
3.2 不同冗余结构下的PET性能对比
在3.1 节的基础上,将附录A 表A2 中的参数代入式(7)—(12),对双子模块公共冗余型PET的可靠性及成本进行评估。同时,对已有不同冗余结构以相同的计算原则和参数进行可靠性和成本分析,用于性能对比。所分析的结构如下:结构Ⅰ为双子模块公共冗余结构,即本文所提出的结构;结构Ⅱ为无冗余结构[15];结构Ⅲ为单子模块公共冗余结构[12];结构Ⅳ为单子模块分相冗余结构[10];结构Ⅴ为双子模块冗余结构[14];结构Ⅵ为双子模块分相冗余结构。以上6种结构的可靠性分析结果如图6所示。
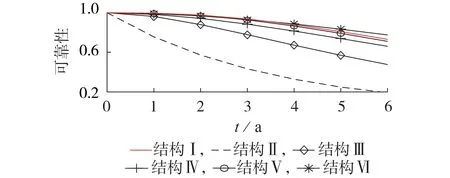
图6 采用不同结构的PET可靠性对比Fig.6 Reliability comparison of PET among different structures
采用不同结构的PET的成本计算结果与投入运行第1年的可靠性如表1所示,表中还展示了PET的容量、级联子模块数N以及各冗余结构下的冗余子模块数Nr。需要说明的是,各冗余结构下的可靠性及成本分析结果是针对不同的冗余设计方法,基于相同的PET 主电路和容量,通过统一的计算原则和数据得到的。因此,能够反映不同冗余结构的性能相对关系,基本不受具体数据的影响。

表1 采用不同结构的PET可靠性及成本评估Table 1 Reliability and cost estimation of PET with different structures
由图6 可见,采用结构Ⅱ和结构Ⅲ的PET 可靠性远低于其他结构,不能满足工程应用需求。本文提出的双子模块公共冗余结构(结构Ⅰ)在设备投运初期可靠性最高,长期运行过程中,其可靠性仅次于结构Ⅵ,但差别不大。由表1 可见,结构Ⅵ成本远高于其他结构,因此其性价比远低于结构Ⅱ之外的其他结构,工程实用性较差。结构Ⅰ成本略高于结构Ⅱ和结构Ⅲ,但是能够大幅提升PET 运行可靠性。结构Ⅴ性能指标略逊于结构Ⅰ。但需要指出的是,与结构Ⅴ相比,结构Ⅰ中冗余子模块结构与PET 主电路的子模块结构相同,其触发控制系统、散热装置、机械结构等均可直接沿用主电路子模块的设计方案。结构Ⅴ中的冗余子模块与主电路子模块结构不同,其触发控制系统、散热装置、机械结构等均需要在主电路子模块基础上进行相应的改动,且不利于检修和故障更换。此外,结构Ⅰ因采用与主电路子模块相同的结构,可拓展性强,模式切换控制简单。结构Ⅴ的切换逻辑以及冗余子模块的控制复杂度会随着冗余子模块数量的增加而增加。综上,本文提出的双子模块公共冗余结构能够在控制成本的前提下,有效提升PET的可靠性,较好满足工程应用要求。
4 仿真验证
在PSCAD/EMTDC 软件中搭建PET 及冗余结构的详细模型,对冗余结构功能及容错控制策略的有效性进行测试。仿真系统关键参数如附录A 表A3 所示。在仿真测试中,分别考虑定功率和定电压控制模式,以及不同负载水平和外部故障等条件,针对单子模块故障、同相和异相双子模块故障等故障类型进行了测试,以全面分析本文所提出的冗余结构和容错控制策略。
4.1 单子模块故障
PET 运行于定功率整流工况,传输功率为额定功率。SMa2在0.2 s 时发生开路故障。故障前后的子模块电压如图7 所示,图中usma2、urm1和urm2分别为故障子模块SMa2电压、RM1和RM2电压,且均为标幺值。由图7 可见,单子模块故障下,采用冗余结构的PET能够迅速切换至单子模块投入模式,以RM1替换故障子模块,从而保证整体系统稳定可靠运行。
图7 额定负载单子模块故障下的子模块电压Fig.7 Voltage of SM under single-SM fault in rated load condition
故障子模块及冗余子模块的端口电压及电流如图8所示,图中ua2、ia2和urmo1、irm1分别为故障子模块和RM1的端口电压、电流,且均为标幺值。故障发生前,故障子模块投入主电路运行,端口电压为正弦脉宽调制波,电流为桥臂电流,RM1运行于旁路状态,端口电压及电流均为0。故障发生后,故障子模块运行于旁路状态,RM1投入主回路替代故障子模块。冗余结构下的模式切换过程平滑迅速,不会产生剧烈的暂态冲击。
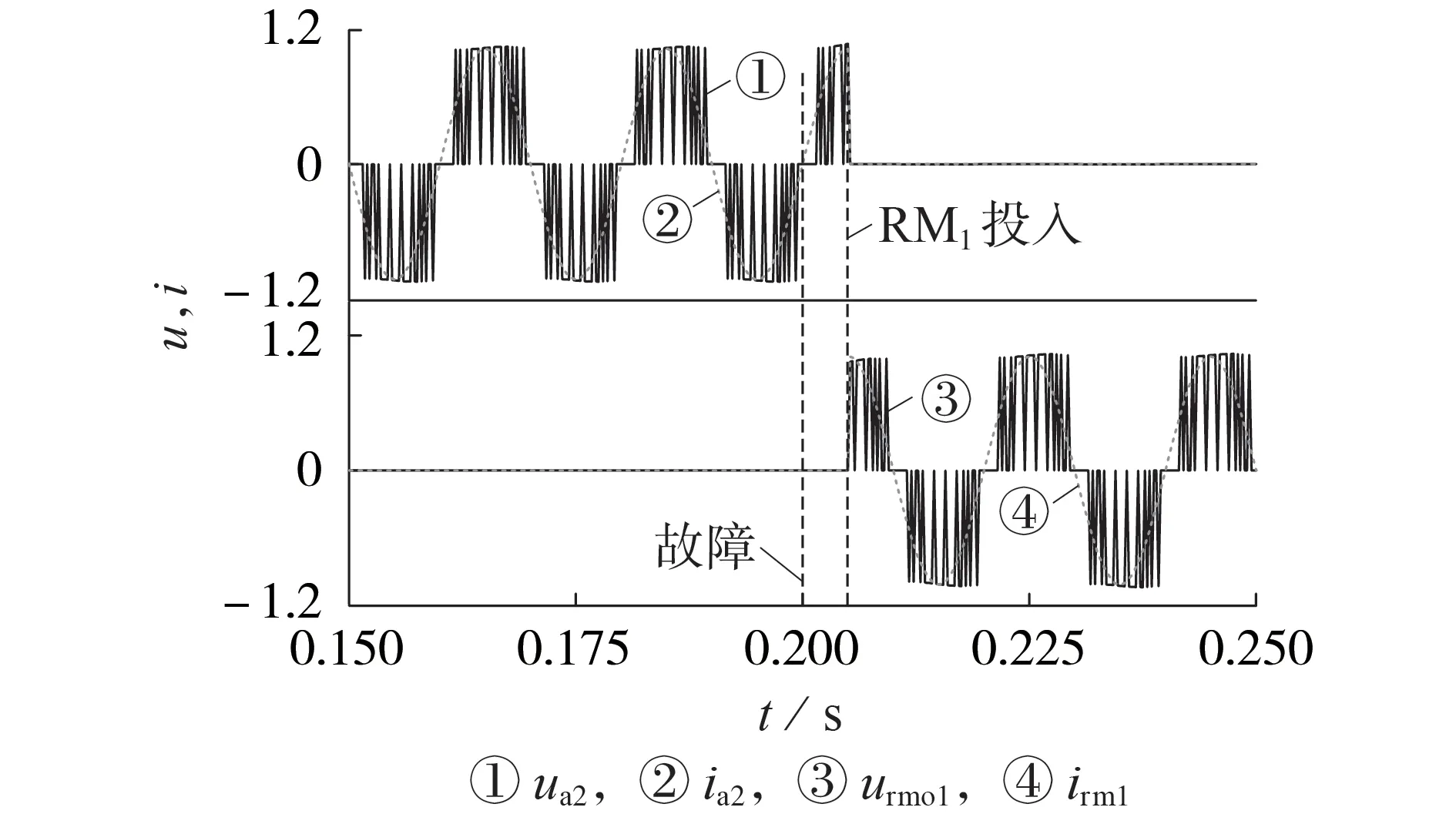
图8 单子模块故障下的子模块端口电压及电流Fig.8 Voltage and current of SM port under single-SM fault
设初始工况与上文一致,在0.15 s时,BC两相电压跌落至额定值的40%,PET进入低电压穿越状态。在0.2 s时,SMa2发生短路故障。附录A 图A6 给出了冗余结构下PET 在低电压穿越运行期间的工作情况。由图可见,子模块发生短路故障后电压跌落,冗余结构迅速投入子模块RM1。RM2仍处于备用状态。容错控制系统在PET低电压穿越期间能够可靠工作,冗余结构模式切换对整体运行性能基本不会造成影响。
4.2 同相双子模块故障
PET 运行于定电压整流额定负载工况。在0.2 s和0.3 s 时,SMa2和SMa4内部分别发生开路故障(故障1)和短路故障(故障2)。图9 为无冗余条件下的直流电压udc和交流电流iabc波形,图中电压和电流均为标幺值。由图可见,子模块内部发生故障时,将严重影响PET 运行性能,双子模块故障情况下运行性能进一步劣化,定电压控制模式下直流母线电压产生波动,影响电能质量。交流侧电流发生严重畸变和过流,威胁PET安全,对电力系统造成谐波污染。
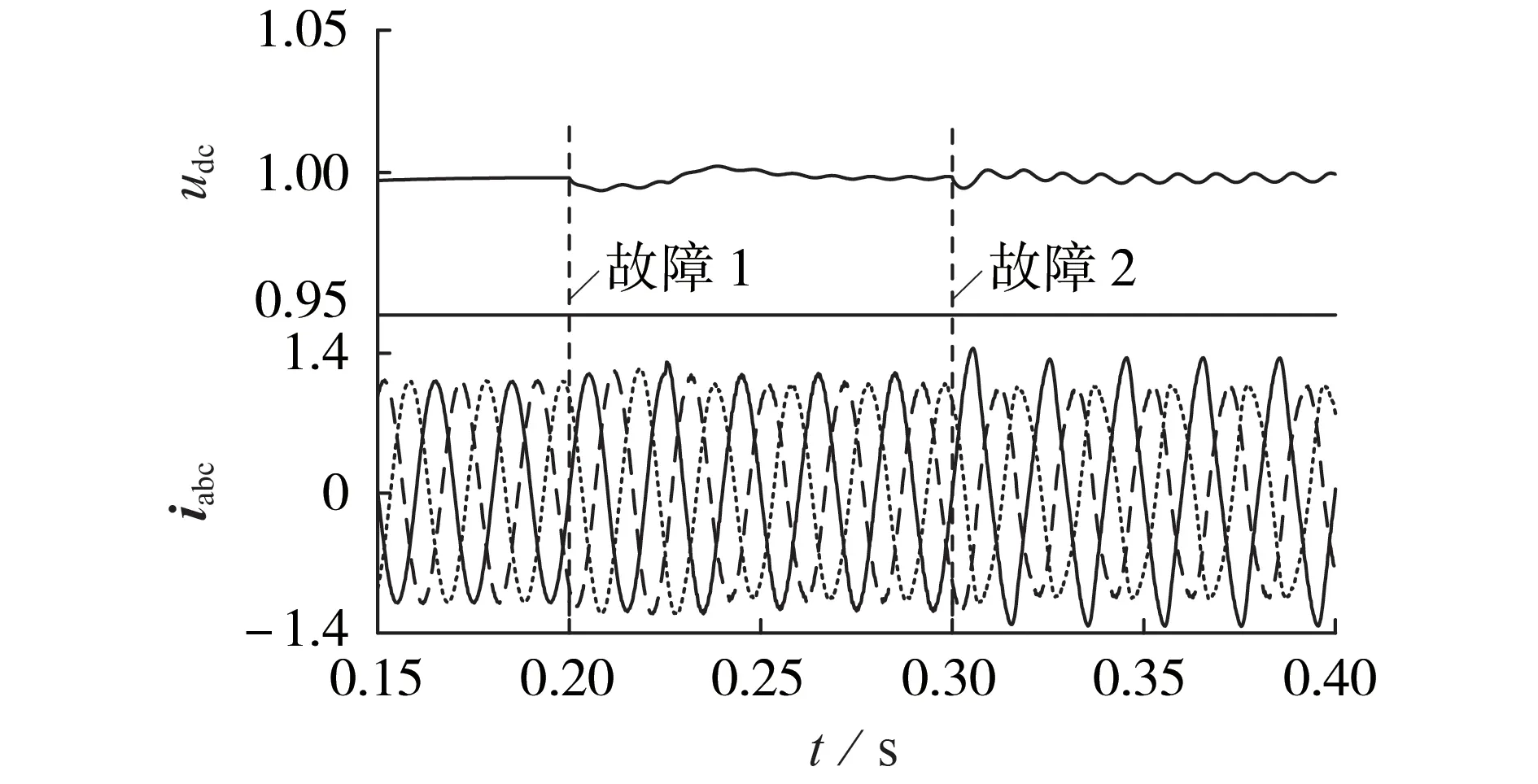
图9 无冗余条件下同相双子模块故障波形Fig.9 Waveforms of dual-SM fault in same phase without redundancy
采用本文所提出的新型双子模块公共冗余结构,在容错控制策略调节下,同相双子模块故障情况下的直流电压、交流电流和子模块电压波形如图10所示,图中usma4为SMa4电压,且图中电压和电流均为标幺值。故障子模块及冗余子模块的端口电压和电流波形如附录A图A7所示。
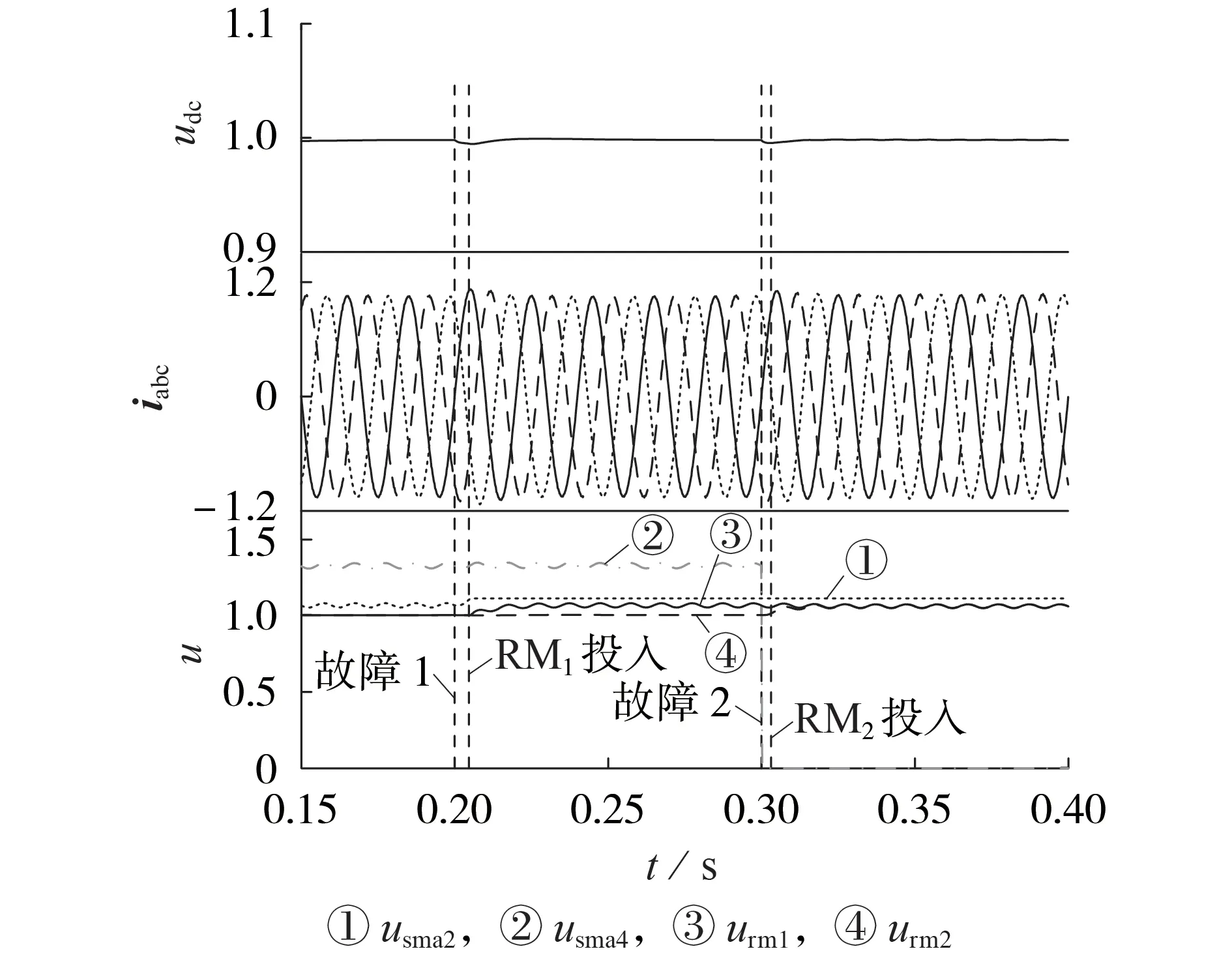
图10 冗余结构下同相双子模块故障波形Fig.10 Waveforms of dual-SM fault in same phase with redundant structure
由图10 和图A7 可见,SMa2发生开路故障时,控制系统旁路故障子模块并投入RM1,由正常模式切换至单子模块投入模式。该情况下,SMa4发生短路故障时,RM2快速投入,由单子模块投入模式切换至同相双子模块串联投入模式。在冗余结构运行模式切换过程中,冗余子模块能够迅速替代故障子模块运行,不会产生严重的暂态冲击,对PET整体运行性能基本不会造成影响。切换完成后,PET 能够实现稳定可靠运行。
4.3 异相双子模块故障
PET 运行于定功率逆变状态,传递功率为额定功率,在0.2 s 和0.3 s 时,SMa2和SMb5分别发生短路和开路故障。附录A 图A8 为无冗余条件下的功率和交流电流波形。由图可见,发生异相双子模块故障时,也会对PET的运行性能造成较大影响。此时,故障相的级联子模块数减小,由于子模块电压被公共直流母线电压箝位在额定电压附近,PET 输出的多电平电压无法达到预定值。因此,交流侧电流将发生畸变和过流,进而导致有功功率及无功功率产生大幅波动。
异相双子模块故障下,具备冗余结构的PET 功率、交流电流和子模块电压如附录A 图A9所示。故障子模块及冗余子模块的端口电压和电流波形如附录A 图A10 所示。由图A9 和图A10 可见,SMa2发生短路故障时,电压发生严重跌落,控制系统将RM1投入A 相运行,冗余结构由正常模式切换至单子模块投入模式。该情况下,SMb5发生开路故障时,在逆变状态下其子模块电压逐渐跌落,由控制系统将RM2投入B 相运行,冗余结构由单子模块投入模式切换至双子模块分相投入模式。这与图10 所示效果相同,可见采用冗余结构及相应容错控制策略能够提高PET 在子模块故障期间的可靠性,维持其整体运行性能。
5 结论
本文针对CHB 型PET 提出一种双子模块公共冗余结构和容错控制策略,并与其他冗余结构的可靠性和制造成本进行对比分析,得到如下主要结论。
1)与分相冗余结构相比,公共冗余结构能够降低成本,减小设备体积和重量,并提高冗余模块利用率。与单子模块冗余结构相比,双子模块冗余结构功能丰富,可以实现任意单子模块和双子模块故障备用,增强PET容错能力。
2)容错控制策略实现方便,可以根据故障情况进行冗余结构运行模式的灵活切换,在PET 定电压和定功率等不同控制模式以及正常运行和电网故障等多种工况下均能有效实现备用功能。仿真结果验证了其具有良好的性能。
3)可靠性和成本分析结果表明相较于采用其他冗余结构的PET,本文所提出的设计方案可较好兼顾可靠性和经济性要求,更好满足工程应用要求。
本文所提出的冗余结构设计原则具有较强的可拓展性,适用于任意数目冗余子模块的应用场合。此外,该冗余方案和控制策略除能用于PET外,也能为采用CHB 结构的有源滤波器、静止同步补偿器等电力电子设备在冗余结构设计和容错控制方面提供参考。
附录见本刊网络版(http://www.epae.cn)。