基于2CRU/2PRRR并联式灌装机构的设计与工作空间分析
2022-04-14刘建国马春生文杰李瑞琴屈淑维
刘建国,马春生,文杰,李瑞琴,屈淑维
基于2CRU/2PRRR并联式灌装机构的设计与工作空间分析
刘建国,马春生,文杰,李瑞琴,屈淑维
(中北大学 机械工程学院,太原 030051)
针对目前流水线上的灌装机构,对含有不同倾角瓶子的通用性不强等问题,提出一种新型2CRU/2PRRR并联机构来解决这一问题。首先用SolidWorks软件创建2CRU/2PRRR并联机构的立体模型。利用螺旋理论分析得出该机构的自由度,并用修正的Kutzbach-Grübler公式对分析得出的自由度进行验证。然后利用运动学模型和D-H法分析求解机构动平台的位置反解。最后应用Matlab软件编写相应的极限边界搜索程序,运算求解出工作空间,并给出该灌装机构在流水线的应用实例。2CRU/2PRRR并联机构拥有1个转动自由度,3个方向的移动自由度。工作空间为规则立方体,内部连续无空洞且无奇异位型。2CRU/2PRRR并联式灌装机构结构简单、运行稳定、性能良好,完全可以满足流水线上对含有倾角的瓶子进行灌装时的运动和工作范围需求,提高了灌装机构的通用性。
2CRU/2PRRR;并联机构;螺旋理论;位置反解;工作空间
并联机构相较于串联机构而言,通常具有一些独特的性能,例如刚度大、精度高、速度高、误差小、对称结构具有良好的各向同性等优点。并联机构在包装机械行业中应用十分广泛,如灌装机械、封袋机械、喷码机、分拣机械、码垛机械等。并联机器人的应用有利于提高生产效率,降低工人的劳动强度。目前,在包装机械行业中一般3~4个自由度就能够完成工作要求,而大部分少由度的并联机构拥有结构简单,价格低廉,容易控制,便于大规模应用等优点,因而成为了包装机械行业应用研究的新热点。
在现代先进制造的大背景下,在包装机械行业中对于并联机器人的研究成果有很多,如尹晓秦等[1]提出了一种用于解决流水线上不同斜面贴标问题的含有闭环的并联机构。崔马茹等[2]提出了一种用于对灌装瓶子进行压盖工序的3-URPR并联机构。王新宇等[3]提出了一种用于解决不同斜面上旋盖问题的2-PSR/UPU并联机构。米文博等[4]提出了一种用于药品的装箱和码垛环节的2-UPR/RSPR并联机构。马振东等[5]提出了一种用于代替人进行分拣作业的新型2-RPS/UPRS并联机构。近些年来在学术界中对于少自由度的并联机构也进行了大量研究,提出许多新构型,为工程应用奠定良好基础。如郭东杰等[6]对3-CRU并联机构,进行了动力学建模和分析。寇月阳等[7]对3PRRR并联机构进行了设计与优化;尹小琴等[8]对三平移并联机构3-RRC的工作空间进行了分析。李秦川等[9]重点对并联机构的构型综合、运动性能分析和尺度综合三方面的研究进行了总结分析。付萌[10]对少自由度并联机构尺度参数的多目标优化进行了研究。
当前,在液体物料生产中,有许多物料如饮料方面的汽水、果汁、牛奶、啤酒等,调味品方面的酱油、醋、果酱等,生活用品方面的洗洁精、洗面奶等都需要进行灌装工序。目前流水线上所用的灌装机构种类繁多,例如:旋转型灌装机、直线型灌装机等,但大多数灌装机只能对直口瓶子进行灌装,而对含有倾角瓶子就不适用了,因此文中拟提出一种2CRU/2PRRR四自由度并联机构用于灌装行业,以提高灌装机构的通用性。
1 2CRU/2PRRR并联机构的自由度分析
1.1 机构设计与建立坐标系
2CRU/2PRRR并联机构见图1,该机构由1个定平台、1个动平台、2条CRU支链和2条PRRR支链组成。其中,CRU支链由1个C副(圆柱副)、1个R副(转动副)和1个U副(虎克铰)组成,PRRR支链包由1个P副(移动副)和3个R副(转动副)组成。
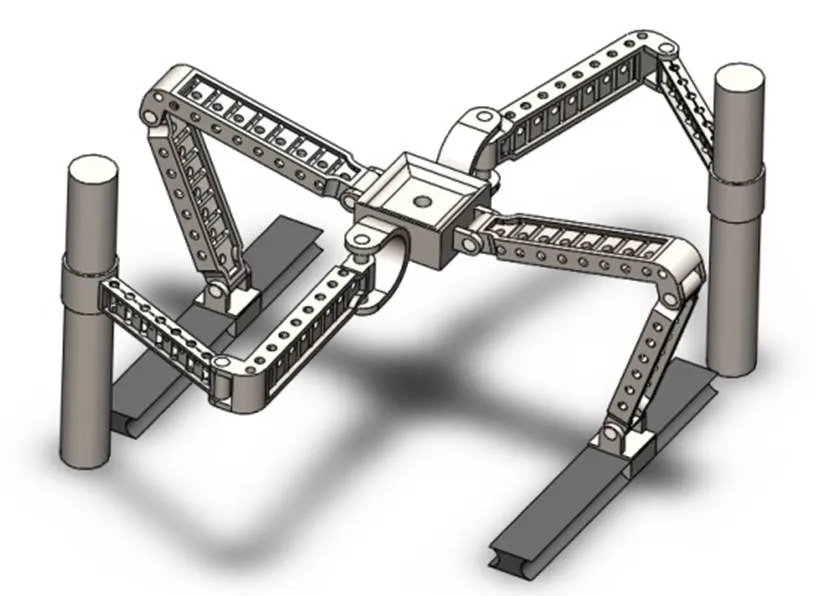
图1 2CRU/2PRRR并联机构
在2CRU/2PRRR并联机构上建立坐标系,见图2。定平台是边长为的正方形,1、2、3、4分别为4个顶点;动平台是边长为的正方形,1、2、3、44点分别为动平台各个边长的中点。以定平台的几何中心0为定坐标系原点,0轴平行于12,0轴平行于23,0轴垂直于平面1234向上,建立坐标系0-000;以动平台的几何中心1为动坐标系原点,1轴与42平行,1轴与13平行,1轴与面1234垂直向上,建立坐标系1-111。

图2 2CRU/2PRRR并联机构坐标系
基于节能环保的理念,为降低成本、降低环境污染以及能源消耗、提高机构的操作性能,在保证机构的运行性能完全能够满足工作要求的情况下,尽可能地减轻机构重量,降低运行时的功耗。该机构采用轻型材料来替代金属材料以降低杆件的重量,实现减轻机构重量和提升运行性能的目的;同时满足工作时所需的强度和刚度要求下,应用形状优化的方法,对该机构进行轻量化设计。通过轻量化设计后,该机构因为整体重量降低了,运行起来更加灵活稳定,同时也实现了工作效率的提高以及资源的最优化配置,这对推动建设环保低碳经济型社会的发展具有重要意义。
1.2 自由度分析

CRU支链的运动螺旋系为:
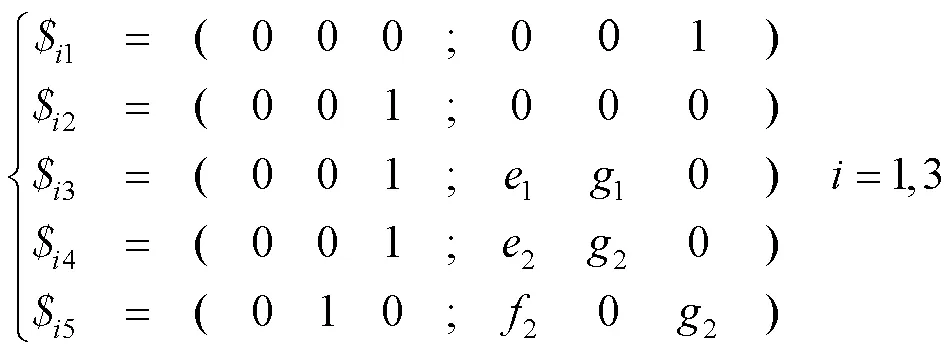
对式(1)求反螺旋系,可得:

其次,对PRRR支链进行自由度分析,设PRRR支链的动坐标系为2-222,2轴垂直于23水平向右,2轴平行于23,2轴由右手螺旋定则可得,见图2。
PRRR支链的运动螺旋系为:

对式(3)求反螺旋系,可得:

整合式(2)和式(4),再次求其反螺旋,则得到2CRU/2PRRR并联机构的运动螺旋系为:
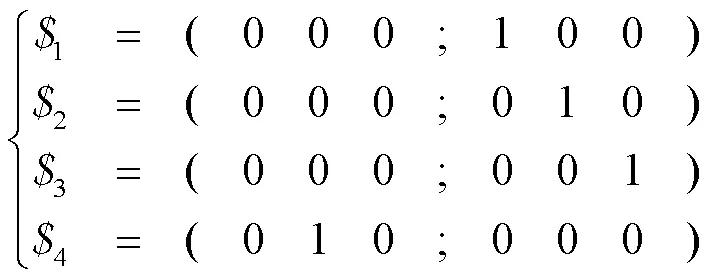
经过对式(5)进行分析得知,2CRU/2PRRR并联机构的动平台含有4个自由度,分别是沿0轴、0轴、0轴方向的3个移动自由度,以及1个绕0轴方向的转动自由度。



经过K-G公式的计算,可证实该机构具有4个自由度。沿0轴、0轴的2个移动自由度的目的是为了调整下料口与瓶口的水平距离,沿0轴的移动自由度是为了调整下料口与瓶口的垂直距离,绕0轴的转动自由度是为了调整下料口的倾斜角度,更好地适应斜口瓶的灌装。
2 2CRU/2PRRR并联机构的位置反解




通过式(7)—(9)可知,CUR支链的位置反解为:



图3 PRRR支链的D-H变换坐标系
然后建立D-H参数,见表1。表1中,参数、、1、2为已知量,参数2、3、4、2为未知量。
表1 PRRR支链的D-H参数

Tab.1 D-H parameters of PRRR branch chain
利用参数表中的数据,将欧拉角位姿矩阵与D-H坐标变换矩阵进行分析,由此可以反解出2、3、4、2,计算过程见式(11)—(14)。
D-H坐标变换矩阵:

经过化简计算,可得到PRRR支链的位置反解2、2:
式中:
3 2CRU/2PRRR并联机构的工作空间分析
通过观察图4可知,2CRU/2PRRR并联机构在空间中有较大的工作范围,工作空间形状为立方体,能够更好地适应流水线工作,且在整个工作空间内部连续、紧凑、无空洞,表明该并联机构运行连续、平稳,具有良好的运行性能[17-18]。
4 2CRU/2PRRR并联机构的应用
2CRU/2PRRR并联机构可用于流水线上的灌装工作,应用示意图见图5。其中,图5a为该机构在对直口瓶子进行灌装的过程,图5b为该机构对含有倾角的瓶子进行灌装的过程。首先,将位于该机构4条支链底部的支撑点分别与预设在传输带两边的安装孔一一对应,并使之固定连接。然后当传输带将待装瓶传送至灌装机构的工作范围内时,根据瓶口的位置调整下料口的姿态,使下料口对准瓶口。当下料口对准瓶口后,置于下料口末端的灌装阀将自动打开,位于动平台上的储液箱里的待装液料就会通过下料管流入瓶子内,从而实现灌装工序。当灌装工序完成后,灌装阀将自动关闭,下料口升起离开瓶口,开始下一个瓶子的灌装工序。其中,下料口位于动平台中心处下端,下料口呈“锥形”口,目的是方便使其对准瓶口。最后,利用SolidWorks创建2CRU/2PRRR并联式灌装机构的虚拟样机,根据灌装时对于工作路径的需求,对样机加以相应的程序控制进行运动仿真,在仿真过程中,该机构在流水线上不仅能够对直口瓶子进行灌装工序,也可以对含有不同倾角的瓶子进行灌装工序。由此结果可以显示该机构运行平稳、精确、迅速,能够精准地完成灌装任务。不但提高了灌装机械的通用性,而且也大大提高了工作效率。
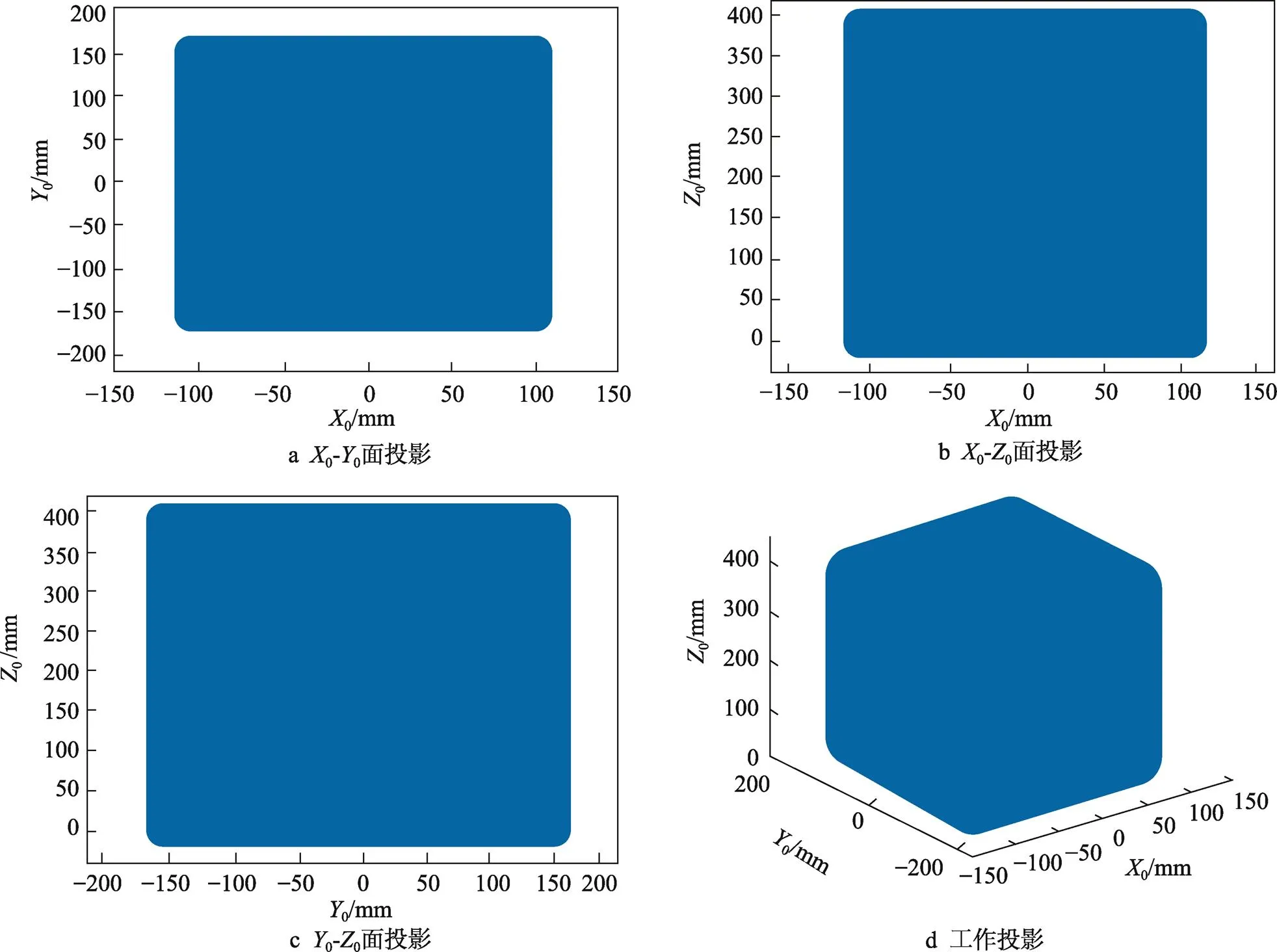
图4 2CRU/2PRRR并联机构的可达工作空间

图5 2CRU/2PRRR并联机构应用实例
5 结语
文中提出用于流水线上的2CRU/2PRRR并联式灌装机构,首先基于螺旋理论对其自由度进行分析,得出该并联机构拥有4个自由度,即沿0、0、0轴方向的移动自由度和绕0轴的转动自由度,完全可以满足流水线上对含有倾角的瓶子进行灌装时的运动需求,并利用修正Kutzbach -Grübler公式对得到的自由度加以验证,结论无误;然后利用动力学模型分析法和D-H法,联合两者对2CRU/2PRRR并联机构进行了位置反解,通过Matlab求解并绘制出了该并联机构的工作空间,工作空间的形状为立方体,连续、无空洞,表明该机构运行连续且灵巧,工作性能良好,完全能够满足运行时的工作范围要求。最后给出了该并联机构的工程应用实例。2CRU/2PRRR并联式灌装机构大大提高了灌装机构的通用性,同时也提升了灌装工作效率,该并联机构可以有效地应用在实际生产过程中。
[1] 尹晓秦, 马春生, 米文博, 等. 含有闭环的并联贴标机构运动学分析[J]. 包装工程, 2021, 42(3): 185-189.
YIN Xiao-qin, MA Chun-sheng, MI Wen-bo, et al. Kinematic Analysis of Labeling Mechanism Based on Closed-Loop Parallel Mechanism[J]. Packaging Engineering, 2021, 42(3): 185-189.
[2] 崔马茹, 武建德, 李瑞琴, 等. 3-URPR并联机构的逆运动学与可达工作空间分析[J]. 包装工程, 2020, 41(21): 196-201.
CUI Ma-ru, WU Jian-de, LI Rui-qin, et al. Inverse Kinematics and Reachable Workspace of 3-URPR Parallel Mechanism[J]. Packaging Engineering, 2020, 41(21): 196-201.
[3] 王新宇, 李虹, 李亚丽, 等. 基于2-PSR/UPU并联机构的旋盖装置设计及性能分析[J]. 包装工程, 2020, 41(3): 188-193.
WANG Xin-yu, LI Hong, LI Ya-li, et al. Design and Performance Analysis of a Novel Capping Device Based on 2-PSR/UPU Parallel Mechanism[J]. Packaging Engineering, 2020, 41(3): 188-193.
[4] 米文博, 马春生, 李瑞琴, 等. 应用于药品包装生产线的2-UPR/RSPR并联机构的工作空间分析[J]. 包装工程, 2021, 42(3): 171-176.
MI Wen-bo, MA Chun-sheng, LI Rui-qin, et al. Workspace of 2-UPR/RSPR Parallel Mechanism Applied to Medicine Packaging Production Line[J]. Packaging Engineering, 2021, 42(3): 171-176.
[5] 马振东, 马春生, 米文博, 等. 基于2-RPS/UPRS并联机构的自动分拣机运动分析[J]. 包装工程, 2021, 42(1): 157-162.
MA Zhen-dong, MA Chun-sheng, MI Wen-bo, et al. Kinematics Analysis of Automatic Sorter Based on 2-RPS/UPRS Parallel Mechanism[J]. Packaging Engineering, 2021, 42(1): 157-162.
[6] 郭东杰, 李杨民, 李彬. 一种新型3-CRU并联机构的动力学建模[J]. 机械工程与技术, 2016, 5(4): 344-351.
GUO Dong-jie, LI Yang-min, LI Bin, et al. Kinetic Modeling of a Novel 3-CRU Translational Parallel Mechanism[J]. Mechanical Engineering and Technology, 2016, 5(4): 344-351.
[7] 寇月阳, 陈柏, 吴洪涛, 等. 3PRRR并联机构的设计与优化[J]. 机械设计与制造, 2015(3): 152-154.
KOU Yue-yang, CHEN Bai, WU Hong-tao, et al. The Design and Optimization of 3PRRR[J]. Machinery Design & Manufacture, 2015(3): 152-154.
[8] 尹小琴, 马履中. 三平移并联机构3-RRC的工作空间分析[J]. 中国机械工程, 2003, 14(18): 1531-1533.
YIN Xiao-qin, MA Lv-zhong. Workspace Analysis of a 3-DOF Translational Parallel Mechanism 3-RRC[J]. China Mechanical Engineering, 2003, 14(18): 1531-1533.
[9] 李秦川, 柴馨雪, 陈巧红. 两转一移三自由度并联机构研究进展[J]. 科学通报, 2017, 62(14): 1507-1519.
LI Qin-chuan, CHAI Xin-xue, CHEN Qiao-hong. Review on 2R1T 3-DOF Parallel Mechanisms[J]. Chinese Science Bulletin, 2017, 62(14): 1507-1519.
[10] 付萌. 少自由度并联机构尺度参数的多目标优化研究[D]. 成都: 电子科技大学, 2013: 59-69.
FU Meng. Multi-Objective Optimization Dimensional Design of Lower-Mobility Parallel Manipulators[D]. Chengdu: University of Electronic Science and Technology of China, 2013: 59-69.
[11] 张国庆, 杜建军. 基于螺旋理论的空间机构自由度分析方法[J]. 机械设计与制造, 2009(1): 10-12.
ZHANG Guo-qing, DU Jian-jun. Analysis of Spatial Mechanisms Based on the Screw Theory[J]. Machinery Design & Manufacture, 2009(1): 10-12.
[12] 黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 2版. 北京: 高等教育出版社, 2014: 111-152.
HUANG Zhen, ZHAO Yong-sheng, ZHAO Tie-shi. Advanced Spatial Mechanism[M]. Beijing: Higher Education Press, 2014: 111-152.
[13] 于靖军, 刘辛军, 丁希仑, 等. 机器人机构学的数学基础[M]. 北京: 机械工业出版社, 2008: 101-188.
YU Jing-jun, LIU Xin-jun, DING Xi-lun, et al. Mathematical Foundations of Mechanism Robotics[M]. Beijing: China Machine Press, 2008: 101-188.
[14] 石志新, 叶梅燕, 罗玉峰, 等. 3T1R并联机构结构设计与位置分析[J]. 农业机械学报, 2016, 47(8): 364-369.
SHI Zhi-xin, YE Mei-yan, LUO Yu-feng, et al. Structure Design and Displacement Analysis of 3T1R Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(8): 364-369.
[15] 范建会, 赵新华, 李彬. 一种新型三自由度并联机构逆运动学及其工作空间分析[J]. 天津理工大学学报, 2013, 29(5): 16-20.
FAN Jian-hui, ZHAO Xin-hua, LI Bin. Inverse Displacement Kinematics and Workspace Analysis of a Novel 3-DOF Parallel Manipulator[J]. Journal of Tianjin University of Technology, 2013, 29(5): 16-20.
[16] TIAN Chun-xu, FANG Yue-fa, GE Q J. Design and Analysis of a Partially Decoupled Generalized Parallel Mechanism for 3T1R Motion[J]. Mechanism and Machine Theory, 2019, 140: 211-232.
[17] YANG Shuo-fei, SUN Tao, HUANG Tian. Type Synthesis of Parallel Mechanisms Having 3T1R Motion with Variable Rotational Axis[J]. Mechanism and Machine Theory, 2016, 109: 220-230.
[18] DESAI R, MUTHUSWAMY S. A Forward, Inverse Kinematics and Workspace Analysis of 3RPS and 3RPS-R Parallel Manipulators[J]. Iranian Journal of Science and Technology, Transactions of Mechanical Engineering, 2021, 45(1): 115-131.
Design and Workspace Analysis of Parallel Canning Mechanism Based on 2CRU/2PRRR
LIU Jian-guo, MA Chun-sheng, WEN Jie, LI Rui-qin, QU Shu-wei
(School of Mechanical Engineering, North University of China, Taiyuan 030051, China)
The work aims to propose a new 2CRU/2PRRR parallel mechanism to solve the problem that the filling mechanism in current on the assembly line is not suitable for bottles with inclination angle. Firstly, a three-dimensional model of the 2CRU/2PRRR parallel mechanism was created with SolidWorks software. The degree of freedom of the mechanism was analyzed by the screw theory and verified by the modified Kutzbach-Grübler formula. Then the kinematics model and D-H method were used to analyze and solve the inverse position solution of the mechanism moving platform. Finally, the corresponding limit boundary search program was programmed with Matlab software, and the workspace of the mechanism was solved by calculation, and the application example of the filling mechanism in the assembly line was given. The results indicated that 2CRU/2P RRR parallel mechanism had one rotational degree of freedom, three moving degrees of freedom. The shape of the workspace was a regular cube, and the interior was continuous without cavityand singular position. The parallel mechanism has simple structure, operation steadily, high performance, and it can completely meet the requirements of movement and working range when filling bottles with inclination angles on the assembly line, thus improving the versatility of the filling mechanism.
2CRU/2PRRR; parallel mechanism; spiral theory; position inverse; workspace
TB486;TH112
A
1001-3563(2022)07-0184-06
10.19554/j.cnki.1001-3563.2022.07.023
2021-05-19
山西省自然科学基金(201801D121183);山西省回国留学人员科研资助项目(2021-114)
刘建国(1998—),男,中北大学硕士生,主攻机构理论与机器人技术。
马春生(1974—),男,博士,中北大学副教授,主要研究方向为机构理论与机器人技术。
责任编辑:曾钰婵
