一种高精度天线转台的实时补偿方法
2022-04-12健吴翔常慧娟陈
张 健吴 翔常慧娟陈 薇
(北京无线电计量测试研究所,北京100039)
1 引 言
天线转台是天线罩(天线)电性能测试系统的重要组成部分,绝对精度和重复定位精度是其最重要的指标之一。 转台方位轴和俯仰轴绝对精度一般要求较高,为满足天线转台各轴对精度的要求,多采用全闭环控制方式,反馈元件安装在末端执行机构。 本天线转台用于室外天线测试,因此要求反馈元件有较高的防护等级。 栅式传感器包括光栅、磁栅、感应同步器、球栅和容栅等五类,其中磁栅传感器是利用磁栅与读数头的磁作用进行测量的一种位移传感器,作为一种新型数字式传感器,精度较高,抗干扰能力强,成本较低,便于安装,且使用耐水耐油耐粉尘,防护等级可以达到IP67,在数字化测量系统中应用广泛。 但是由于磁栅本身的特性和结构安装等原因,其重复定位精度较好,但绝对定位精度不佳,达不到厂家的标称精度,难以满足天线测试系统的高精度要求,因此利用其重复精度较高的特点,通过软件对测量返回值进行实时补偿,以达到提高绝对定位精度满足测试要求的目的。
2 磁栅的特点
磁栅作为反馈元件,利用电磁转换的原理,通过录磁头在磁栅尺上录刻出间隔严格均匀的磁波,磁波间距即栅距,通过读数头接收磁波的信号,进而通过磁波个数计算出位移。
磁栅由于制造设备的误差和刻录方法自身引入的误差等使其实际精度和理想精度有一定偏差,但是激光干涉仪录磁法是目前应用最为广泛的磁栅录磁方式之一,其精度可以达到10m,因此磁栅自身精度误差对实际应用影响并不大。
由于空气磁阻很大,为了保证读数头的输出信号幅度稳定,磁栅尺和读数头之间不允许有较大或可变间隙。 由于尺面可能存在不平整、磁栅圆度可能存在偏差、装配和调整不可能达到理想状态等原因,栅尺实际精度与理论值存在一定差距。 以上因素是造成转台精度不能满足要求的主要原因,因此需要结合激光跟踪仪的测量结果分析引起误差的主要原因,并通过软件实时补偿得以改善。
3 未加补偿时的转台精度
天线转台机械结构如图1 所示,方位轴和俯仰轴绝对精度要求为±0.005°,负载为10kg。 为满足天线转台各轴对精度的要求,方位轴、俯仰轴均采用全闭环控制方式,选用圆磁栅安装在末端执行机构。 磁栅尺选择雷尼绍MS10A0148B0074 相对式磁栅尺,栅距为20μm,尺带长度148mm,读数头型号为LM13IC10DBA10A00,分辨率为160 000。

图1 天线转台机械结构图Fig.1 Mechanical structure of antenna turntable
转台控制器采用台达AS332 系列的可编程逻辑控制器(PLC),驱动器为台达A2 系列驱动器,控制器与驱动器之间采用CANopen 总线进行通讯,触摸屏通过串口与控制器进行通讯,控制转台动作。位置精度的测量选用莱卡AT402 激光跟踪仪。
通过控制器控制转台方位轴从0°开始,以5°/s 的速度运动,转台每运行20°,用激光跟踪仪检测靶标球的空间位置,直至方位轴转一周,测得最后一个点的位置。 对激光跟踪仪测得数据进行数据处理,得到未经补偿时位置精度数据如表1 所示。 利用表1 数据绘制精度误差曲线,如图2 所示。
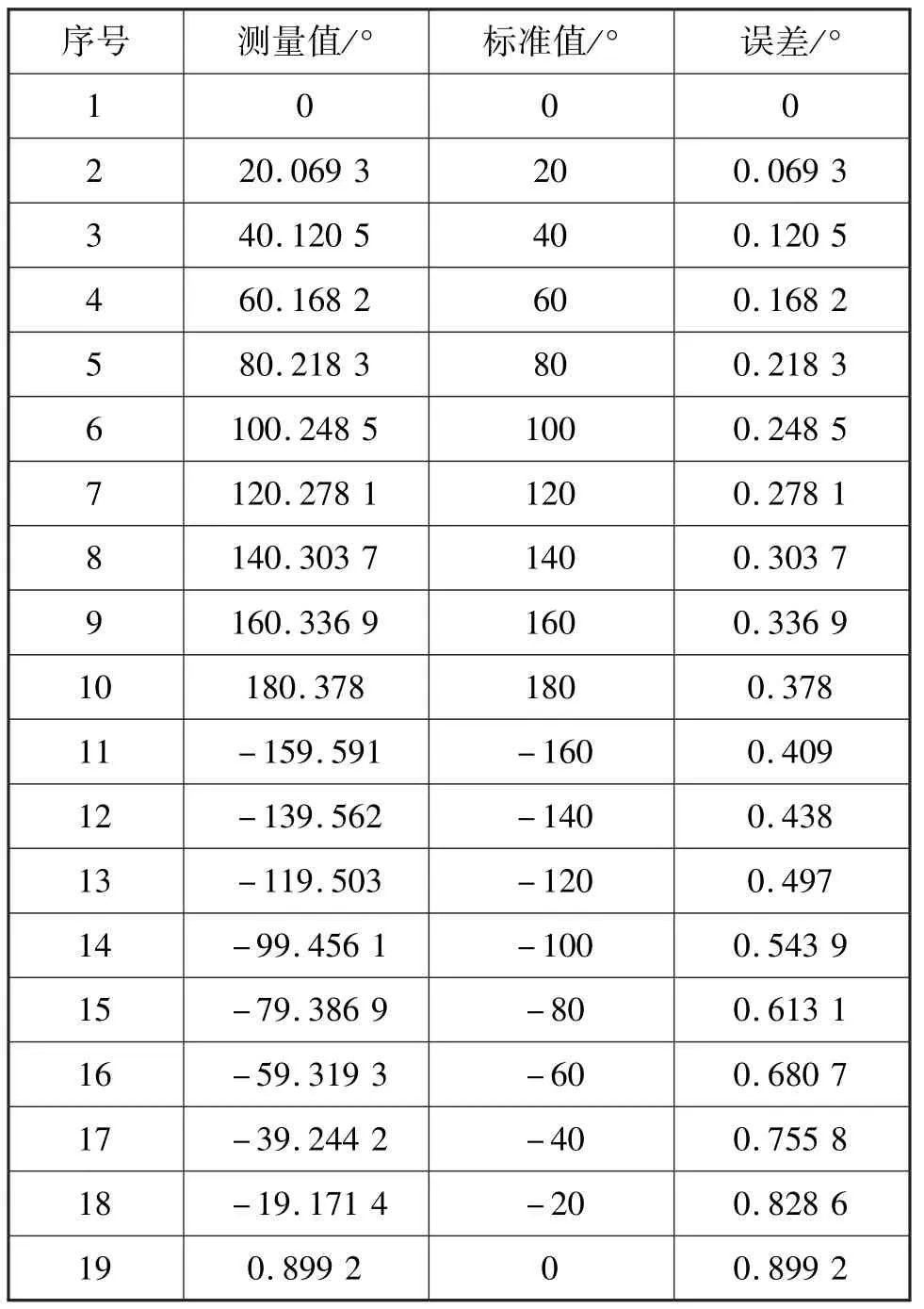
表1 未经补偿时方位位置精度数据Tab.1 Position accuracy data of azimuth axis without compensation

图2 未加补偿时方位轴精度误差曲线图Fig.2 Curve of azimuth axis position accuracy data without compensation
结合表1 和图2,方位轴精度在未加任何处理时绝对定位精度误差的最大值达到0.899 2°,不能满足系统对定位精度的要求。 因此,需要通过软件进行实时补偿。 经过多次试验测得的数据可知,未加补偿时方位轴的重复定位精度较好,精度误差曲线具有一定的重复性,这为软件实时补偿提供了可能。
通过控制器控制转台俯仰轴从-60°开始,以5°/s 的速度运动,转台每运行10°,用激光跟踪仪检测靶标球的空间位置,直至转到60°,测得最后一个点的位置。 对激光跟踪仪测得数据进行数据处理,得到未经补偿时位置精度数据如表2 所示。 利用表2 数据绘制精度误差曲线,如图3 所示。

表2 未经补偿时俯仰位置精度数据Tab.2 Position accuracy data of pitching axis without compensation
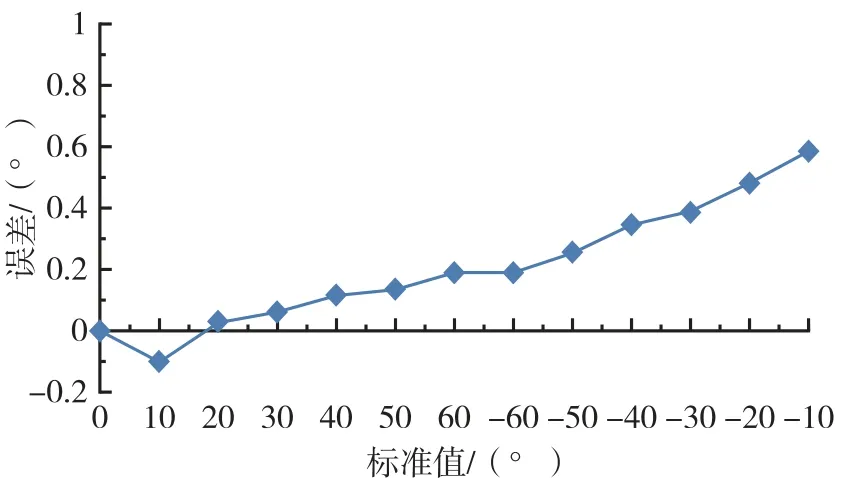
图3 未加补偿时俯仰轴精度误差曲线图Fig.3 Curve of pitching axis position accuracy data without compensation
结合表2 和图3,俯仰轴精度在未加任何处理时绝对定位精度误差最大为0.585 1°,不能满足系统对定位精度的要求,且未加补偿时俯仰轴的重复定位精度较好,精度误差曲线也具有一定的重复性,同样可以通过软件进行实时补偿。
4 引起误差的原因
未加补偿时方位轴精度误差曲线和未加补偿时俯仰轴精度误差曲线均具有一定的位置重复性,从图2 和图3 可以看出方位轴和俯仰轴精度误差曲线有一定的相似性,又各有特点,因此引起两轴的精度误差的原因有异有同,需分别进行分析。
1)引起方位轴控制精度误差的原因是多方面的,首先PLC 控制电机做闭环运动的原理是PLC 向驱动器发出电机到达目标位置所需要走过的反馈信号脉冲个数,驱动器同时接收磁栅尺的反馈信号,当磁栅反馈脉冲个数达到PLC 命令的脉冲个数时,驱动器认为电机运动到位,进而停转。 由于磁栅尺安装在末端执行机构,与电机端存在减速比,因此PLC 发出的目标反馈信号脉冲个数与驱动器接收的磁栅反馈脉冲个数存在与减速比相关的比例关系,经换算后PLC 发出的目标反馈信号脉冲个数为非整数值,但是由于PLC 控制程序中,该值必须为整数,所以此处的近似处理造成了系统控制精度存在线性误差;
2)其次,利用激光跟踪仪测试系统绝对定位精度时,其测试精度与靶标臂长和仪器距靶标的距离有关系,靶标臂长越长,仪器距靶标的距离越远,测试精度越高。 如果测试精度与激光跟踪仪的最高测量精度相差不大时,则靶标臂长和仪器距靶标的距离就显得尤为重要;
3)另外,磁栅本身的特性和其安装误差也是引起定位精度误差的一个重要原因。 磁珊读数头和磁栅之间的安装距离不能完全满足安装精度的要求时,会引起读数头信号丢失,从而导致定位精度的跳变。磁栅尺为人工手贴,在安装时磁栅与转轴不能做到完全同心,二者圆心的偏差会引入呈正弦规律的误差。
除上述原因外,俯仰轴控制精度误差,还受机械结构的影响。 由于重力的存在,俯仰轴在正负侧运行时,机械间隙方向相反,但由于本转台俯仰轴采用全闭环控制,机械间隙的影响被消除了,所以图3 中重力作用的影响并不明显。
5 实时补偿方法
本激光跟踪仪的测量精度为测量分辨率的1/10,因此能够满足测量要求。 以方位轴为例,针对PLC 控制脉冲数取近似值引起的线性误差,其补偿原理如下:方位轴电机转360°需要PLC 发出10 000个脉冲,减速比为700,因此末端转动1°对应磁栅脉冲个数的理论值为
136070010 000
磁栅分辨率为160 000,电机转360°时末端返回的脉冲数为228.571 429,但由于PLC 中该参数只能设置为整数,因此四舍五入后该参数为229,末端转动1°对应磁栅脉冲个数的反馈值为
1360160 000229
线性误差比例系数为
1001 875
补偿线性误差后,可以观察到当前定位误差的形式主要呈近似正弦规律,正是由于磁栅尺为人工手贴,在安装时磁栅与转轴不能做到完全同心,二者圆心的偏差会引入呈正弦规律的误差,且该规律与转台的空间绝对位置关系稳定,针对这一误差和实际测试结果可以得到补偿值为

式中:——正弦曲线的幅值;——目标位置,(°)。
只能通过将误差曲线拟合成正弦曲线得到其幅值,方位轴补偿公式为

同样按照上述补偿算法对俯仰轴进行线性补偿和正弦补偿。 电机转360°需要PLC 发出10 000个脉冲,减速比为1 350,磁栅分辨率为160 000,电机转360°时末端返回的脉冲数四舍五入后该参数为119,线性误差的比例系数为
1004 062 5
正弦误差的补偿公式为

补偿后采用同样的测量方法对两轴的定位精度进行测量,精度数据如表3 和表4 所示,误差曲线如图4 和图5 所示。
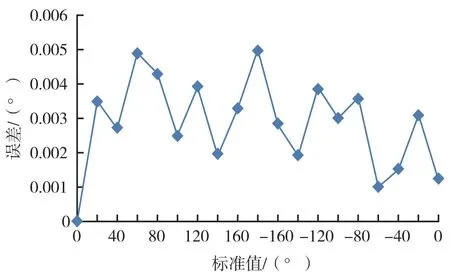
图4 加补偿后方位轴精度误差曲线图Fig.4 Curve of azimuth axis position accuracy data with compensation

图5 加补偿后俯仰轴精度误差曲线图Fig.5 Curve of pitching axis position accuracy data with compensation

表3 方位轴补偿后的定位精度Tab.3 Position accuracy data of azimuth axis with compensation
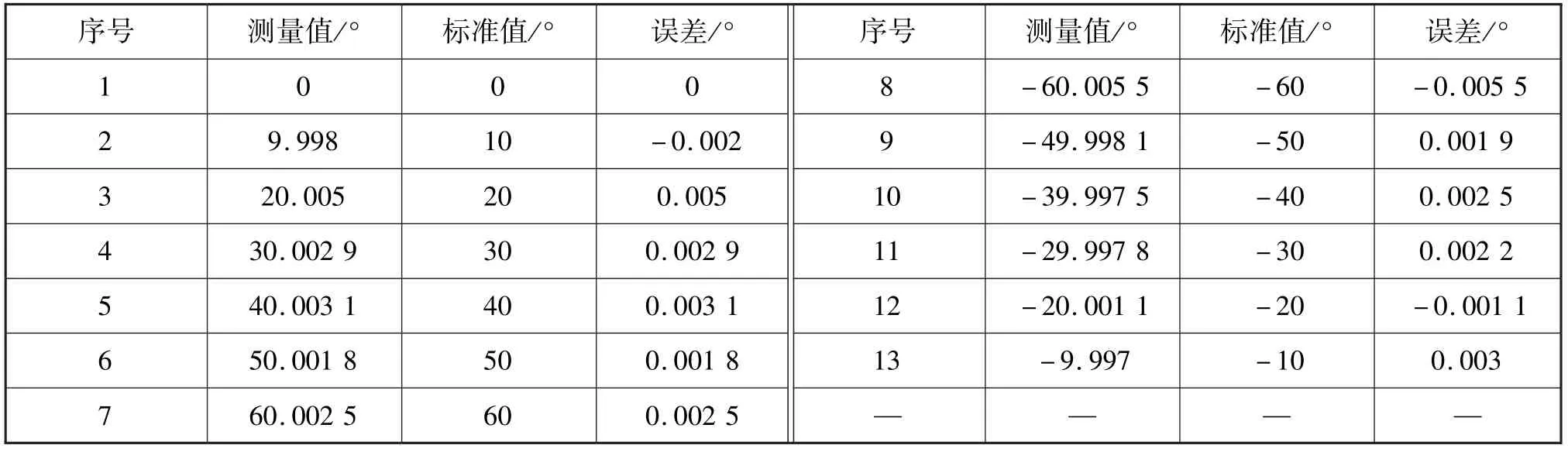
表4 俯仰轴补偿后的定位精度Tab.4 Position accuracy data of pitching axis with compensation
由上述测量结果可以看出,通过软件进行实时补偿后,方位轴和俯仰轴的绝对定位精度均达到±0.005°,满足系统精度指标。
6 结束语
磁栅作为反馈元件,其绝对精度达不到厂家标称值的主要原因为参数计算误差引起的线性误差和磁栅安装与实际转轴中心不同心引起的正弦误差,通过本文论述的磁栅闭环反馈实时补偿算法,即引入实时线性补偿并叠加正弦补偿,可以对磁栅反馈的主要误差进行实时补偿,能够有效地提高绝对定位精度,满足天线转台的定位精度要求。
