旋转偏心质量块式消振电力作动器建模与控制
2022-04-04郝振洋王涛曹鑫甘渊俞强
郝振洋 王涛 曹鑫 甘渊 俞强
摘要:直升机等非固定翼飞行器在飞行状态时由桨叶旋转所产生的周期性低频振动会通过刚性机体传递至驾驶舱、航空发动机以及起落架等部位,会造成机体的持续振动,严重时会影响驾驶员的生命安全。提出了旋转偏心质量块式消振电力作动器,并开展了控制方法研究。从理论上推导了旋转偏心质量块式消振电力作动器的输出力模型以及负载转矩模型;提出基于双电机并行独立控制的电力作动器输出力伺服控制策略,在复频域进行了稳定性分析,并针对正弦波非线性负载扰动带来的转矩脉动问题,对双电机并行独立控制策略展开了优化设计,通过负载前馈控制使系统具备良好的鲁棒性和抗干扰性;研制了重量为14 kg的实验样机并完成了优化控制策略前后电力作动器稳态、动态性能的对比验证实验。结果表明,优化控制策略下的作动器输出力动稳态性能满足各项技术指标要求。
关键词:振动控制;消振电力作动器;并行独立控制;负载前馈控制;鲁棒性
中图分类号:TB535;V211.52
文献标志码:A
文章编号:10044523( 2022)01-0209-11
DOI: 10.16385/j .cnki.issn.10044523.2022.01.023
引 言
直升机在飞行时,其旋翼的桨叶在高度复杂的气动环境中工作,这种气动环境会导致气动载荷的波动,当与叶片的动态特性和弹性运动耦合时,会产生强烈的噪声和振动[1]。这种机体的振动不仅会影响驾驶员与乘客的舒适性,还会降低直升机的性能。由此,降低直升机等非固定翼飞行器的振动水平已迫在眉睫,各国科研人员也开展了大量的研究[2]。
减振技术经历了从被动式减振到主动式减振的发展过程。被动式减振技术是指利用不需要借助外部能量的措施和装置实现系统减振的技术,它易于实现,装置简单,广泛应用于一些对消振水平要求不高的场合。主动式消振技术主要根据传感器采集到的振动力信息,控制作动器产生与其大小相等方向相反的作动力,从而抵消振动的减振技术[3]。文献[4]中美国西科斯基公司的S-76B直升机引进了主动消振电力作动系统,地面振动测试表明座舱振动水平得到了大幅度降低[4]。美国学者Kenneth DGarnjost在其专利中提出了离心式电力作动器的机械结构及其独立控制算法,通过电机来驱动偏心质量块的方式输出消振力[5]。国内的主动消振技术目前还在起步阶段,主要集中在船舶消振等减振频带较窄的领域。文献[6]指出,南京航空航天大学在直升机主动消振系统的减振算法方面做了大量的研究工作,并在电磁式电力消振作动器方面取得了一定的成果[6],但电磁式消振作动器无法在固定工作频率下实现输出力大范围的调整控制。文献[7]指出,哈尔滨工程大学的韩广才课题组主要做了船舶电动消振作动器理论分析和仿真,并且相位差在180°±10°范围内减振效果良好[7];同时文献[8]中所设计的作动器及相角模糊控制器具有很好的性能,相角跟踪能力很强,动态调节过程比较快,但由于控制器结构相对复杂,动力学模型不易准确建立,所以精确性相对一般[8]。文献[9]研究了伯努利梁受迫横向振动机理,分析了振动响应与激振力和激振力矩作用位置间的关系,并进行了有限元仿真验证[9]。文献[10]构建了一种振动主动控制系统,研究了基于Fx-LMS自适应滤波算法的控制律,实验验证了该控制算法可以对舰船典型周期性机械振源的低频振动进行减振控制[10]。
基于偏心质量块式消振电力作动器具备力幅、频率、相位可调的优点,尤其具备在额定频率点最小力到最大力的连续控制的能力,因此偏心质量块式消振电力作动器系统已广泛应用在新一代非固定翼飞行器减振系统中。但是由于偏心质量块负载存在转矩脉动大的问题,会造成电机转速的不同步,带来“拍频现象”,增加了系统控制器的设计难度[11]。本文首先推导了消振电力作动器输出力的数学模型和负载转矩模型。其次,根据输出垂直消振力的数学表达式,提出了双电机并行独立控制的电力作动器输出力伺服控制策略,在复频域分析了其稳定性。最后,为了改善由于正弦非线性负载扰动带来的转矩脉动问题,提出了负载前馈控制策略,并对比分析了其动稳态性能,验证了优化控制策略的合理性。基于研制的14 kg的工程样机,在采取优化控制策略前后,分别对作动器进行输出力性能测试,并进行对比分析,实验验证了所提控制策略的可行性。
1 消振电力作动器动力学建模
1.1 垂直消振力建模
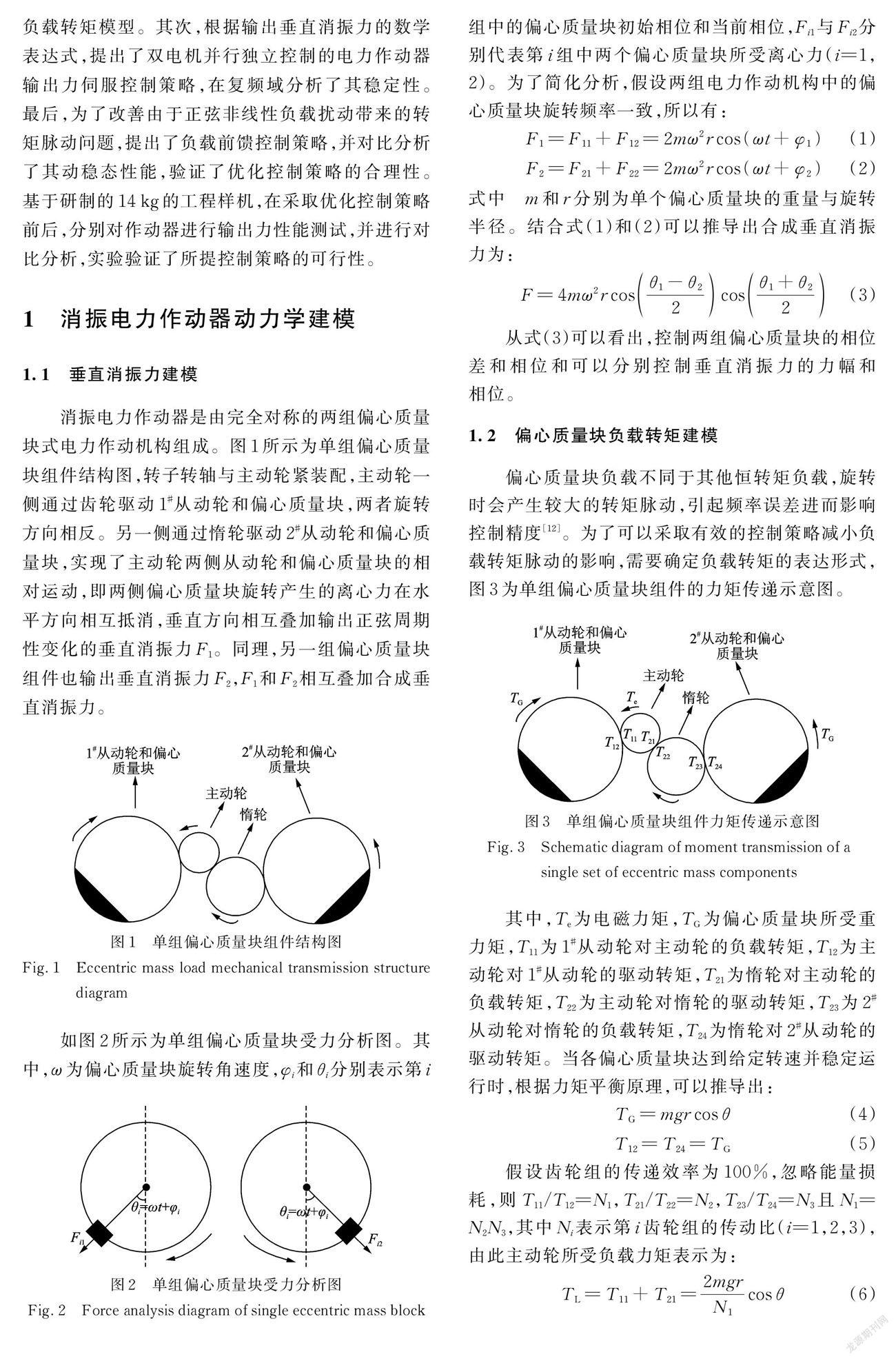
消振电力作动器是由完全对称的两组偏心质量块式电力作动机构组成。图1所示为单组偏心质量块组件结构图,转子转轴与主动轮紧装配,主动轮一侧通过齿轮驱动1#从动轮和偏心质量块,两者旋转方向相反。另一侧通过惰轮驱动2#从动轮和偏心质量块,实现了主动轮两侧从动轮和偏心质量块的相对运动,即两侧偏心质量块旋转产生的离心力在水平方向相互抵消,垂直方向相互叠加输出正弦周期性变化的垂直消振力F10同理,另一组偏心质量块组件也输出垂直消振力F2,F1和F2相互叠加合成垂直消振力。
如图2所示为单组偏心质量块受力分析图。其中,ω为偏心质量块旋转角速度,φi和θi分别表示第i组中的偏心质量块初始相位和当前相位,Fi1与Fi2分别代表第Z组中两个偏心质量块所受离心力(i=1,2)。为了简化分析,假设两组电力作动机构中的偏心质量块旋转频率一致,所以有:
从式(3)可以看出,控制两组偏心质量块的相位差和相位和可以分别控制垂直消振力的力幅和相位。
1.2 偏心质量块负载转矩建模
偏心质量块负载不同于其他恒转矩负载,旋转时会产生较大的转矩脉动,引起频率误差进而影响控制精度[12]。为了可以采取有效的控制策略减小负载转矩脉动的影响,需要确定负载转矩的表达形式,图3为单组偏心质量块组件的力矩传递示意图。
其中,Te为电磁力矩,TG为偏心质量块所受重力矩,T11为1#从动轮对主动轮的负载转矩,T12为主动轮对1#从动轮的驱动转矩,T21为惰轮对主动轮的负载转矩,T22为主动轮对惰轮的驱动转矩,T23为2#从动轮对惰轮的负载转矩,T24為惰轮对2#从动轮的驱动转矩。当各偏心质量块达到给定转速并稳定运行时,根据力矩平衡原理,可以推导出:gzslib202204041825令KG=2mgr/N1,Kc代表主动轮所受负载力矩系数。
2 电力作动器控制策略的设计及优化
根据公式(3),对输出消振力的控制可以通过控制偏心质量块的位置来实现,而偏心质量块是由电机通过主动轮去驱动的。因此,对于偏心质量块的控制即是对电机转速的控制,本文提出基于双电机并行独立控制的电力作动器输出力控制策略[13],如图4所示。
该系统中,两台方波电机相互独立,通过控制两台电机的转速进而控制偏心质量块的相位θ1和θ2。对输出消振力力幅的控制通过控制01- 02来实现,当θ1=θ2时,两组偏心质量块组件输出力F1和F2同相位,输出幅值为4mw2r的最大消振力;当θ1= - θ2时,两组偏心质量块组件输出力F1和F2反相位,输出消振力为0。能否实现对输出力的控制关键是对方波电机转速即频率精度的精确控制,因此本文采取伺服三环控制策略进行环路设计,ACR为电流环调节器,ASR为转速环调节器,APR为位置环调节器,其中电流环、转速环采用PI控制,位置环采用比例调节器。置环,因此可以将电流环等效为一阶惯性环节,再将该一阶惯性环节和转速环采样滤波电路合并,得到时间常数为T∑n的一阶惯性环节,其中T∑n= Ton+2T∑i=0.7 ms,如图6所示。其中,Te为电磁转矩,根据叠加原理,分别计算出从θ*和TL到输出θ的传递函数φ1(s),φ2(s):
所以,G(s)在无穷远处(s=∞)的零极点也是N(λ)在λ=0处的零极点。可以定出,G(s)在“s=∞”处的极点重数为0,零点重数为3。基于上述分析,因为极点均具有负实部,所以可以判定控制系统是稳定的,为了进一步分析其稳态性能,绘制出φ1(s),φ2。(s)的根轨迹,如图7,8所示。
从图7中分析可得,随着工作频率ω的增加,φ1(s)的两个极点将进入虚轴的右半平面,临界频率为ω1=960 rad/s,当ω>ω1时,φ1(s)将会失稳;同样,在图8中,随着工作频率ω的增加,φ2(s)的两个极点将进入虚轴的右半平面,临界频率为ω2=260 rad/s,当ω>ω2时,φ2(s)将会失稳。因此,能够充分保证消振控制系统稳定工作的频带为(0,260) rad/s。
2.2 正弦非线性负载扰动抑制研究
由于电力消振作动器采用偏心质量块负载,偏心质量块带来了转速脉动增大、环路响应降低等不利影响,进而影响输出作动力的频率和力幅精度[18]。由于转速环的响应低于电流环,仅仅通过转速环难以满足偏心质量块导致的负载周期性脉动,因此建立了负载模型,将负载前馈至电流环给定值。前馈控制策略可以让电流环及时响应负载的变化,消除偏心质量块带来的不利影响,达到减小转速脉动、提高环路响应的目的[19]。
由式(6)可知,等效负载转矩为一周期正弦脉动量,对于电力作动器系统来说是一周期扰动量,且为低频扰动。仅靠PI调节器和反馈控制,可以选择合适的参数改变带宽,抑制高频扰动,但却无法抑制低频扰动,因此引入负载前馈控制,优化控制系统框图如图9所示。
为了简化分析,对图9进行合理简化为如图10所示的简化框图。其中,Gn(s)为负载前馈传递函数。根据在2.1节采用的叠加原理,可以分别计算出从θ*和TL到输出θ的传递函数φ*1(s),φ*2(s)。
对比式(7),(8)和(17),(18)可得,从给定相位θ*到偏心质量块输出相位θ的传递函数保持不变,因此其零极点也不会发生变化。但是,从正弦负载扰动TL到输出θ的传递函数发生了变化,附加了一个分量。通过合理设计Gn(s)可以使附加分量与φ2(s)相抵消,从而消除正弦负载扰动对控制系统输出的影响。
式(20)为正弦负载扰动近似全补偿条件,在实际工程应用中可用PD调节器实现。
优化后单组偏心质量块组件传动机构的传递函数矩阵为:
与G (s)相同,G*(s)无无穷极点,无穷零点的重数为3,由极点均具有复实部可得优化后控制系统稳定,其根轨迹图如图11所示。
图11与图7相同,当工作频率超过ω1时,将有两个极点进入虚轴的右半平面,控制系统不能再稳定工作,因此优化后控制系统的频带为(0,960)rad/s,因为消振电力作动器的额定工作频率为21.5Hz,优化后控制系统稳定工作的频带宽度是其额定工作频率的5倍以上,满足工程设计要求。
2.3 控制系统动态性能对比分析
前两节对优化前后控制系统的稳定性能和工作频带进行了研究,优化后的消振控制系统具有更加良好的稳定性能和更宽的工作频带。动态性能同样是消振系统设计过程中需要考虑的关键因素,本节基于优化前后控制系统的单位阶跃响应曲线对比分析了控制系统的动态性能。
结合2.1和2.2节,优化前后消振作动器单组偏心质量块组件传动机构的输出分别为:
从整体轮廓图可以看出,优化前不同工作频率下系统单位阶跃响应曲线在上升阶段会有超调现象,并且工作频率越高,超调量越严重,在30 Hz时超调量σ=2.3。从局部放大图可以看出,不同工作频率下系统单位阶跃响应曲线在稳态阶段会发生振荡,并存在稳态误差。与超调量的规律相同,工作频率越高,振荡越严重,稳态误差也越大,在30 Hz时稳态误差为0.024。
为了清楚地说明负载前馈控制策略的优越性,将优化前后的控制系统单位阶跃响应曲线绘制于如图13所示的一张图中,给定频率为额定工作频率21.5 Hz。
从图中可以看出,优化前的系统单位阶跃响应曲线相当于在优化后的系统单位阶跃响应曲线的基础上叠加了一个正弦脉动分量。当ω=21.5 Hz时,优化前的调节时间ts=0.13 s、超调量σ=2、稳态误差为0.02;优化后的调节时间ts=0.07 s、幾乎没有超调量和稳态误差。相比于优化前,优化后的控制系统具有更好的动稳态性能,鲁棒性和抗扰动能力更强。gzslib2022040418253 实验验证
为了验证负载前馈控制策略的正确性和优化后消振控制系统的优良性能,搭建了消振系统实验平台(如图14所示),在实验平台上开展了电力消振作动器性能对比验证实验。实验平台主要由作动器、控制器、转接板、上位机以及直流电源组成。上位机将作动力的幅值、相位和频率信息发送给控制器,控制器将转速、偏心轮位置、故障信号等作动器的状态信息发送给上位机。SCI通信模块为预留的测试端口,用于实验调试时将程序里的变量值输出观测,例如转速给定值、转速实测值、状态标志位等,直流电源提供作动器主电以及控制器的控制电。
表3给出了主动消振电力作动器的性能技术指标。
3.1 电机转速对比实验验证
电机转速的性能可以反映控制效果的优劣,作动器额定频率为21.5 Hz,折算到電机侧额定转速为4000 r/min。针对指标中0.5%的额定频率变化要求,分别进行了给定转速4000 r/min和额定转速4000 r/min突降300 r/min的测试实验,图15为优化控制策略前后稳态电机转速和转速动态变化波形,其中横坐标“数据点/个”表示通过SCI通信模块将转速数据输出观测的采样点个数。
从图15(a)可以看出,优化前转速脉动范围为3900~4160 r/min,转速脉动量约为260 r/min,而优化后转速脉动范围是3960~4050 r/min,转速脉动量约为90 r/min;从图15(b)中可以看出,优化前转速下降300 r/min需要8个脉动周期,而优化后需要约2个脉动周期,约是优化前的1/4。可见,优化控制策略可以减小转速脉动,提高转速突降时的动态响应速度,有利于提高电力作动器的输出力控制精度。
3.2 作动器输出力性能对比实验验证
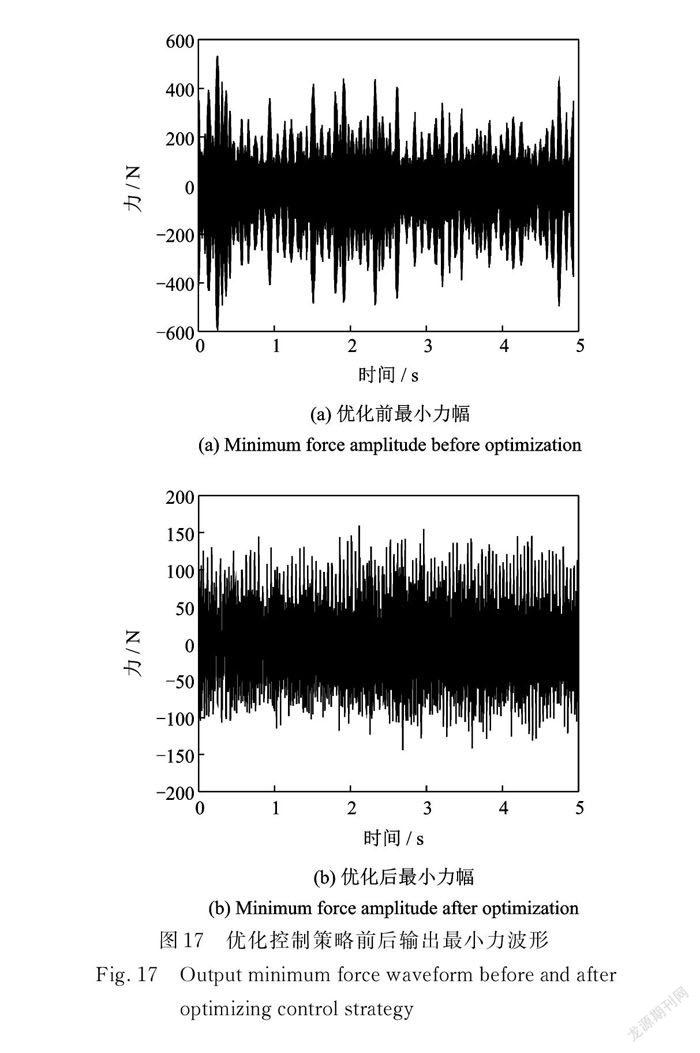
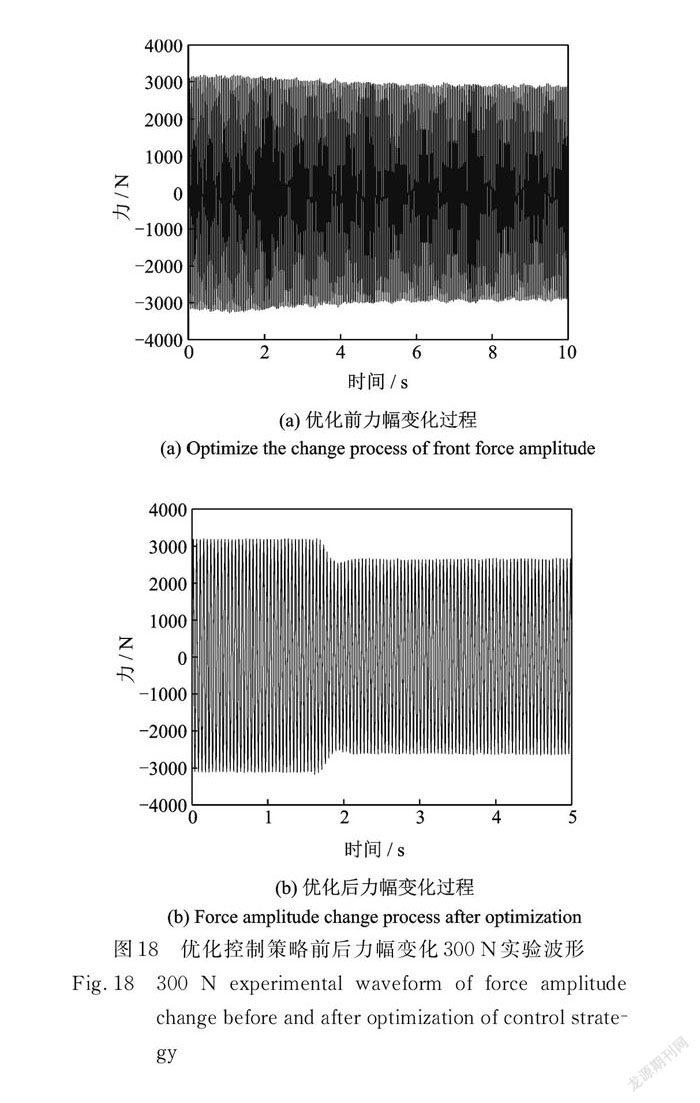
额定频率21.5 Hz的情况下,依次给作动器发送输出最大力幅、输出最小力幅、输出力幅变化300 N的指令,优化控制策略前后对比实验波形如图16~18所示。
从图16(a)可知,优化前的输出力幅有明显脉动,且略微向下偏置,而优化后输出力幅恒定,基本关于0对称;由图16(b)可知,优化前输出力频率精度存在0.25 Hz的误差,而优化后与给定值完全相同。
由图17可以看出,优化前最小力幅变化范围为±600 N,相比之下优化后力幅的变化范围为±150 N,变化范围比优化前缩小了900 N。
由图18(a)可知,优化前力幅变化300 N过程缓慢,调节时间超过5s,并且力幅波动较大,而优化后力幅变化300 N调节时间不超过0.5 s,输出力波形稳定。
结合图16~18可知,优化控制策略下作动器的动稳态性能优良,可以快速跟踪上给定指令,满足控制精度要求,也进一步验证了本文所提出的负载前馈控制策略的正确性和理论分析的合理性。
4 结 论
为了解决直升机的振动问题,本文提出了基于双电机并行独立控制的输出力伺服控制策略,并针对由偏心质量块负载带来的正弦非线性扰动问题和转矩脉动问题提出了负载前馈控制策略。得出如下结论:
1)本文推导了消振电力作动器垂直输出力和负载转矩的数学模型,将作动器系统模块化,为实现输出消振力的控制提供了理论基础。
2)提出了基于双电机并行独立控制的输出力伺服控制策略,系统中的两台电机相互独立,控制的核心是对单侧偏心质量块组位置的精确跟踪,控制方法简单有效。
3)对于并行独立控制策略,考虑到偏心质量块带来的正弦非线性扰动,提出了负载前馈控制策略,可以实现对负载扰动的全补偿,提高了控制系统的抗干扰能力,同时结合控制系统的根轨迹显著提高了系统的频带宽度。
4)与优化前的并行独立控制系统相比,优化后控制系统的单位阶跃所反映的系统动态性能更加优良,结合具体的动态性能指标——调节时间、超调量、稳态误差等,优化后控制系统满足消振电力作动器性能指标要求。
参考文献:
[1]Friedmann P P, Bagnoud F.Rotarywing aeroelasticitycurrent status and future trends[Jl. AIAA Journal,2004, 42 (10):1953-1972.
[2]王建国,汪玉.减振抗冲技术现状和发展方向浅论[Jl.噪声与振动控制,2006, 26(3):11-13.
Wang Jianguo, Wang Yu. Discussion on the status anddevelopment trend of vibration reduction and impacttechnology[Jl. Noise and Vibration Control, 2006, 26(3):11-13.
[3]易群,李彩丽.机械振动主动控制技术的研究现状和发展趋势[J].机械工程与自动化,2016(3):220221.
Yi Qun, Li Caili. Research status and developmenttrend of active control technology for mechanical vibra-tion[J].Mechanical Engineering and Automation, 2016(3):220221.
[4]Welsh W A. Test and evaluation of fuselage vibrationutilizing active control of structural response (ACSR)optimized to ADS27[Cl. Proceedings of the 46th An-nual Forum of the American Helicopter Society, Wash-ington D.C.,1990: 21-37.gzslib202204041825[5]Blackwell R, Millott T. Dynamic design charac teristicof the Sikorsky X2 technology TM demonstrator aircraft[Cl. Proceedings of the 46th Annual Forum of theAmerican Helicopter Society, Montreal, Canada, 2008.
[6]顾仲权.动力反共振隔振[J].噪声与振动控制,1989(6):36-40.
Gu Zhongquan. Dynamic antiresonance isolation[J].Noise and Vibration Control, 1989(6): 3640.
[7]韩广才,李鸿,王芝秋.船舶电动消振作动器研究[J].哈尔滨丁程大学学报,2005,26(1):3943.
Han Guangcai, Li Hong, Wang Zhiqiu. Research onma rine electric vibration reduction actuator[J]. Journalof Harbin Engineering University, 2005, 26(1):3943.
[8]韩广才,刘志强,吴艳红.电动消振作动器模糊控制计研究[J].船舶工程,2008,30(6):27-30.
Han Guangcai, Liu Zhiqiang, Wu Yanhong. Researchon fuzzy control design of electric vibration damping ac-tuator[J]. Ship Engineering, 2008, 30(6):27-30.
[9]吕志庆,黄金林,高占峰.船舶主动减振器安装位置选取和设备选型[J].船舶标准化工程师,2020, 53(3):9398.
Lu Zhiqing, Huang Jinlin, Gao Zhanfeng. The installa-tion location selection and equipment selection of shipactive shock absorbers[J].Ship Standardization Engi一neer,2020,53(3):93 98.
[10]刘晓亮.基于Fx LMS控制技术的主动消振方法及实验研究[J].舰船科学技术,2014,36(4):97 99.
Liu Xiaoliang.Active vibration reduction method andexperimental research based on Fx LMS control tech—nology[J].Ship Science and Technology,2014,36(4):97 99.
[11]夏长亮,李莉,谷鑫,等.双永磁电机系统转速同步控制[J].电工技术学报,2017,32(23):1 8.
Xia Changliang,Li Li,Gu Xin,et al.Speed synchro—nous control of dual peⅡnanent magnet motor system[J].Transactions of the Chinese Society of ElectricalEngineering,2017,32(23):1 8.
[12]崔康宁,于慎波,窦汝桐,等.永磁同步电机转矩脉动和振动噪声抑制[J].微电机,2020,53(10):11 16.
Cui Kangning,Yu Shenbo,Dou Rutong,et al.Sup—pression of torque ripple and vibration and noise of per—manent magnet synchronous motor[J].Micromotor,2020,53(10):11 16.
[13]周广飞,侯博川,杨建华,等.基于动态补偿的多电机控制算法[J].航空学报,2020,41(S1):157 162.
Zhou Guangfei,Hou Bochuan,Yang Jianhua,et al.Multi motor control algorithm based on dynamic com—pensation[J].Acta Aeronautica Sinica,2020,41(S1):157 162.
[14]韩镇锚.永磁同步电机直驱式位置伺服系统控制策略研究[D].南京:南京航空航天大学,2017.
Han Zhenma0.ReSearCh on C0ntrol Strategy of PMSMdirect drive posltlon servo system[D].Nanjing:Nan—jing University of Aeronautics and Astronautics,2017.
[15]王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI控制器参数整定方法[J].电工技术学报,2014,29(5):104 117.
Wang Lina,Zhu H0ngyue,Yang Zongjun.Parametertuning method of PI controller for permanent magnet—Synchronous motor speed control system[J].Transac—tionS 0f the ChineSe SOCiety of EleCtriCal Engineering,2014.29(5):104 117.
[16]胡寿松.自动控制原理[M].北京:科学出版社,2008.Hu Shousong.Principle of Automatic Control[M].Bei—jing:Science Press,2008.
[17]鄭大钟.线性系统理论[M].北京:清华大学出版社,2002.
Zheng Dazhong.Linear System Theory[M].Beijing:TSinghua UniverSity PreSS,2002.
[18]郝振洋,胡育文.电力作动器用高可靠性永磁容错电机控制系统的设计及其试验分析[J].航空学报,2013.34(1):141-152.
Hao Zhenyang, Hu Yuwen. Design and test analysis ofa high-reliability permanent magnet faulttolerant motorcontrol system for electric actuators[J].Acta Aeronauti-ca Sinica, 2013, 34(1):141-152.
