基于滑动窗口LSTM网络的船舶航迹预测
2022-04-02王余宽谢新连马昊潘伟许小卫
王余宽 谢新连 马昊 潘伟 许小卫







摘要:为准确预测复杂水域船舶航迹,提高航行安全水平,提出一种基于滑动窗口长短期记忆(long short-term memory, LSTM)网络的船舶航迹预测方法。根据相邻航迹点的船位特征变化趋势,剔除异常数据,并利用插值方式填补缺失点船位数据,建立船舶航行状态数据库。根据船舶航向变化态势建立航行状态判别准则,识别船舶航行场景。考虑船位信息特征维度高的特点,应用LSTM网络理论构建基于滑动窗口LSTM网络的船舶航迹预测模型。应用大连港水域和黄渤海水域的AIS数据,分别在不同航行场景下进行验证。结果表明:直航型、转向型和‘S’型场景下,滑动窗口LSTM网络预测结果的平均绝对百分比误差、均方误差和均方根误差均比基础LSTM网络、反向传播神经网络和灰色模型的小,这表明滑动窗口LSTM网络对非线性航迹预测的泛化能力强于其他3种模型。
关键词:
船舶航迹预测; 长短期记忆( LSTM)网络; 滑动窗口
中图分类号: U675.7
文献标志码: A
Ship trajectory prediction based on sliding window LSTM network
WANG Yukuan1,2, XIE Xinlian1, MA Hao1, PAN Wei1, XU Xiaowei1
(1. Integrated Transport Institute, Dalian Maritime University, Dalian 116026, Liaoning, China;
2. School of Navigation, Wuhan University of Technology, Wuhan 430070, China)
Abstract:
In order to accurately predict ship trajectory in complex waters and improve the level of navigation safety, a method of ship trajectory prediction is proposed based on the sliding window long short-term memory (LSTM) network. According to the change trend of ship position characteristics of the neighboring trajectory points, the abnormal data are eliminated, the missing ship position data are filled by interpolation, and then a ship navigation state database is established. The navigation state discriminating criteria are established to identify the ship navigation scenarios based on the ship heading change situation. Considering the high dimensionality of ship position information, a ship trajectory prediction model based on the sliding window LSTM network is built by LSTM network theory. The AIS data of Dalian Port, Huanghai Sea and the Bohai Sea waters are used to carry out the verification in different navigation scenarios. The results show that the mean absolute percentage error, mean square error and root mean square error of the sliding window LSTM network prediction results are smaller than those of the basic LSTM network, the back propagation neural network and the grey model in straight, steering and S-type scenarios, indicating that the generalization ability of the sliding window LSTM network for nonlinear trajectory prediction is stronger than the other three models.
Key words:
ship trajectory prediction; long short-term memory (LSTM) network; sliding window
0 引 言
随着现代水上航行环境复杂程度的提高,船舶航行风险增加,特别是在船舶密集水域、施工水域,干扰船舶安全航行的因素更多。准确预测船舶航迹可以帮助操船人员提前识别航行风险,提高船舶航行安全水平。因此,研究如何有效利用船舶航行历史数据,提高航迹预测精度,对于保障船舶航行安全具有重要意义。
船舶航迹预测方法主要包括两类:基于航迹相似度测量的方法和基于神经网络理论的方法。从航迹相似度测量的角度开展的航迹预测研究主要有:ZHANG等[1]建立了一个港口间历史轨迹数据库,利用随机森林模型测量船舶航迹与数据库航迹的相似性来预测船舶航行行为;MURRAY等[2] 和GAO等[3]应用无监督学习方法对船舶历史航迹进行聚类,然后对船舶未来航迹或操纵行为模式进行预测;HAO等[4] 、ZHANG等[5]和PALLOTTA等[6]测量了航迹间相似度,然后获取了船舶在各水域出现概率的分布特征;DE VRIES等[7]对船舶航迹数据进行了聚类、分类以及离群检测等;ZHANG等[8]利用具有噪声的基于密度的空间聚类方法 (density-based spatial clustering of applications with noise,DBSCAN)确定了船舶转弯节点并加以连通,从而推导出船舶航行模式;ZHOU等[9] 和周世波等[10]研究了港口水域内船舶航速等特征的变化态势,揭示了一些船舶行为模式的整体性特征。基于神經网络理论开展的航迹预测研究主要有:LIU等[11] 和任宇翔等[12]基于长短期记忆(long short-term memory,LSTM)网络模型对非线性船舶航行行为进行预测,并强调模型输入向量维度选取的重要性;胡玉可等[13]用基于对称分段路径距离的方法对船舶自动识别系统(automatic identification system,AIS)数据进行预处理,应用循环神经网络预测航迹;SUO等[14]提出一种引入门循环单元模型的深度学习框架来预测航迹,并强调消除冗余数据影响的重要性;ZHOU等[15]、徐婷婷等[16]和游兰等[17]采用船舶航行状态区间差值思想,应用神经网络模型建立船舶航迹预测模型;KIM等[18]考虑船舶交通服务中的情境规则,基于深度学习技术对船舶航行行为进行预测。一些学者采用支持向量机等技术开展了航迹预测研究,比如:NIE等[19]结合支持向量回归和经验模态分解方法,建立航迹短期预测模型;刘娇等[20]用差分进化算法改进支持向量机构建航迹预测模型;谢新连等[21]考虑船舶转向或变速行为,建立了极限学习机航行行为预测模型;ZHANG等[22]利用拉格朗日模型研究了海洋气象环境数据对虚拟漂移器轨迹预测的影响;PERERA[23]基于矢量乘积的算法预测未来短时间内船舶的位置和航向。
上述文献为预测船舶航迹提供了较多思路,但是对以下两个方面考虑较少:一是原始AIS数据存在大量的噪声和冗余,对AIS数据的预处理是航迹预测的关键;二是航迹预测有效步长较短,在保证航迹预测精度的同时提高预测步长,对提高船舶跟踪精度和监管效率有重要作用。
本文构建一种基于AIS数据和LSTM网络的航迹预测方法。在AIS数据处理部分,根据相邻航迹点的船位特征变化剔除船舶异常数据,并利用插值方式补齐缺失的船位信息,然后基于对航向变化态势的分析对船舶航行场景进行识别。在航迹预测部分,应用LSTM网络理论提出基于滑动窗口LSTM网络的预测模型,然后给出航迹预测质量评价标准。最后,对直航型、转向型和‘S’型等3种典型的航行场景进行航迹预测实例分析。
1 AIS数据处理
1.1 数据清洗
航迹预测需要足够多的AIS数据,数据质量对模型预测精度也会有很大影响。然而,受信号干扰、AIS设备使用错误等因素影响,接收到的AIS数据中存在着大量的噪声数据,如船舶位置(经纬度)异常、速度异常和航向异常等。在使用AIS数据之前,需要辨识数据中的异常值,然后剔除异常数据并对缺失数据进行补全。
通常情況下,船舶状态在短时间内不会发生较大变化,因此可根据相邻航迹点的船位特征识别异常值。选取经度、纬度、航速和航向为船位特征,设定该航段发生时间内相邻船位特征差值的最大值为空间变化阈值。
用llon,j、llat,j、υj和χj分别表示第j个航迹点的经度、纬度、航速和航向,用δlon、δlat、δυ和δχ分别表示经度、纬度、航速和航向的空间变化阈值,用
[WTHX]Φ[WTBX]j表示第j个航迹点的船位特征向量,
[WTHX]Φ[WTBX]j=(llon,j,llat,j,υj,χj)。计算第j个航迹点与第j+1个航迹点的船位特征差值,当这两点的任一船位特征差值的绝对值大于相应船位特征的空间变化阈值时,判定第j个航迹点为异常点,并剔除该点数据。
如果被剔除的航迹点不是边界点,则采用插值方式[24]对该点动态信息进行补全。如果被剔除的航迹点是边界点,则不再补全(因为对其进行插值缺少足够的条件)。根据被剔除航迹点前后船位点的经度、纬度、航速和航向等船位特征补全航迹点信息,公式如下:
Φj=Φj-k+(Φj+m-Φj-k)(tj-tj-k)tj+m-tj-k
式中:tj表示缺失点对应的时刻;Φj、Φj+m和Φj-k分别表示缺失点、缺失点前第m点和缺失点后第k点的船位特征信息。
将处理过的AIS数据依据船舶海上移动业务识别码(maritime mobile service identity, MMSI)建立水域内各船舶航迹信息数据库。船舶航迹信息示例见表1。
许偏移值;μ为变向加速度发生突变的阈值。当χ′j≤ε时ψ=1,即将船舶航向单位时间内改变非常小的情况视作船舶未进行转向(处于直航型航行场景)。而当χ′j>ε时,若始终有χ″j≤μ,则视船舶保持一定的变向速率(处于转向型航行场景)。对于‘S’型航行场景的判别,则需满足χ′j>ε,且存在n∈{1,2,…,J}使得χ″n>μ。
ε的确定方法为:统计所有直航型航迹上各航迹点处变向速率的绝对值,取其最大值并向上取整即得ε值。根据实验统计,若船舶为速度较快的引航艇或海巡船等类型船舶,则设置ε=3;若船舶为客船或货船,相邻AIS数据传回时间间隔内船舶航迹不会发生较大偏移,则设置ε=2。μ的确定方法为:统计所有转向型航迹上各航迹点处变向加速度的绝对值,取其最大值并向上取整即得μ值。根据仿真实验设置μ=2。
2 基于滑动窗口LSTM网络的船舶航迹预测模型
2.1 滑动窗口LSTM网络
LSTM网络可以存储远程时间依赖性信息,并且可以在输入数据与输出数据之间进行适当映射,在时间序列数据预测方面功能强大[25]。LSTM网络结构不同于传统的感知器体系结构,它包含1个内部状态存储单元和3个控制信息流的门(输入门、遗忘门和输出门)[25]。
本文应用LSTM网络理论提出一种基于滑动窗口LSTM网络的预测模型。考虑到船位差更能体现船位变化趋势,用船位差作为预测模型的输入变量进行航迹预测。为便于计算,以船舶初始航迹点为基准坐标,采用墨卡托投影坐标转换将船位坐标从大地坐标系转换到平面直角坐标系,
第j个航迹点在平面直角坐标系中的坐标表示为(xj,yj),某航段航迹点在平面直角坐标系中的坐标集合表示为P={(xj,yj)j=1,2,…,J}。船位差序列包含航迹点之间的时间差序列以及船舶沿X方向和Y方向的坐标值差序列,分别用ΔT和ΔP表示:式中:t1和tj+1为分别第1和j+1个航迹点对应的时刻;ΔTj为第j个航迹点与第1个航迹点之间间隔的时间;ΔPj为第j个航迹段的船位差序列;ΔXj和ΔYj分别为第j个航迹段的船位差在X轴和Y轴上的投影。
假设可获得的船位数据的数量为Q,设定滑动窗口长度为N,滑动窗口长度即为每次训练输入船位数据
的长度。LSTM网络每次训练输出一个预测船位数据,并采用“去旧补新”模式迭代更新滑动窗口中的船位数据,即用训练输出值作为最新数据替换滑动窗口中的最旧数据。滑动窗口LSTM网络迭代进行Q-N次训练,不断优化参数获得航迹预测模型。滑动窗口LSTM网络训练结构见图2。
在进行模型训练时,将船位差序列分组,每
组包含从S1到SN+1共N+1个船位差数据;以前N个船位差数据(S1~SN)作为输入,经LSTM网络训练输出第N+1个船位差数据S′N+1,并与第N+1个船位差数据真实值SN+1进行对比;通过输出数据的误差分析迭代调整LSTM网络参数,最终获得LSTM预测模型。在进行LSTM网络训练时,遗忘门f(ti)将ΔTi和ΔPi-1作为输入,计算得到sigmoid激活信息;输入门a(ti)取ΔTi和ΔPi-1来计算c(ti)的值;输出门o(ti)通过sigmoid和tanh函数来调节LSTM单元的输出。
2.2 滑动窗口LSTM网络预测模型
在进行航迹
预测时,利用第Q-N至Q个船位数据预测未来第Q+1个船位数据,再由第Q-N+1至Q+1個船位数据预测第Q+2个船位数据,直至预测到未来第Q+M个船位数据;而在滑动预测过程中,如果真实的船舶数据继续被接收且在时间上覆盖了已预测数据,则使用最新的真实数据替换预测值作为模型输入数据。滑动窗口LSTM网络预测模型见图3。
由船位差序列方程预测未来M个时刻的船舶位置时,用ΔTh,j和ΔPh,j分别表示历史第j个航迹段两端航迹点的时间差和船位差,将所求历史时间差序列ΔTh、船位差序列ΔPh和未来M个时刻对应的时间差序列ΔTp作为输入数据,数据方程如下:
2.3 模型评价标准
为评价滑动窗口LSTM网络模型的航迹预测性能,定义“船位相对误差”(relative error of ship position,ERSP)为船位误差与各船位到基准点距离平均值的比值,用百分比形式表示,其值越小表示预测航迹点偏离实际航迹的程度越小。船位相对误差用于评价模型对单个航迹点预测的准确性。另外,采用基于船位信息的平均绝对百分比误差(mean absolute percentage error,EMAP)、均方误差(mean square error,EMS)和均方根误差(root mean square error,ERMS)等多个指标评估模型对趋势预测的稳定性。EMAP将航迹预测结果偏离程度表示为百分比形式;EMS表示航迹点坐标预测的平均误差;ERMS表示模型预测结果的标准偏差。4个评价指标值越小表明模型预测准确性越高,计算式分别如下
式中:xr,j和yr,j分别为未来第j时刻船舶航迹点沿X方向和Y方向的实际坐标值;xr,1和yr,1分别为未来第1时刻航迹点沿X方向和Y方向的实际坐标值。
3 实例分析
利用AIS设备在辽宁省大连市周边多个海域接收船舶航行数据,编码识别1 000艘次以上船舶的AIS信息。对AIS数据进行清洗,然后利用第1.2节的方法识别并选出处于直航型、转向型和‘S’型航行场景下的船舶各1艘进行航迹预测。选出的3种典型航行场景下的船舶信息见表2。
对3种典型航行场景下的船舶进行航迹预测时,所构建的训练集和测试集数据比例约为4∶1。关于训练和测试过程中的样本分配,以直航型航行场景为例加以说明。训练部分:样本总量Q1为80,以77个时刻的航迹数据(SQ-79,SQ-78,…,SQ-3)为滑动窗口LSTM网络的输入数据,以对应延后3个时段的航迹数据(SQ-76,SQ-75,…,SQ)为滑动窗口LSTM网络的输出数据,训练后保存模型参数。测试部分:样本总量Q2为23,以连续20个时刻的船舶航行动态序列数据(SQ-22,SQ-21,…,SQ-3)为测试
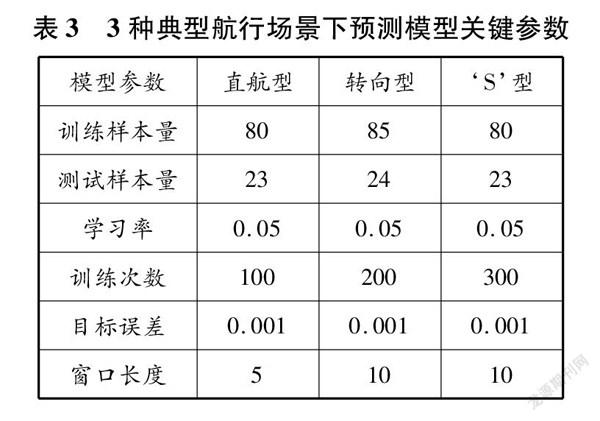
滑动窗口LSTM网络的输入数据,来预测船舶航迹数据(SQ-19,SQ-18,…,SQ)。另外,窗口长度值代表训练序列的输入长度,其值会影响训练迭代时间和预测精度。为避免迭代过程中模型学习时间过长,设置窗口长度阈值上界为15,根据样本量大小设置阈值下界为4。分别对3种典型航行场景,在窗口长度阈值范围[4,15]内搜索最优窗口长度值。根据重复实验结果,当直航型、转向型和‘S’型航行场景下的窗口长度分别为5、10和10时模型达到训练目标误差时的训练时长最短。3种典型航行场景下预测模型关键参数见表3。
表3
模型的损失值会随训练过程变化,因此模型训练的次数会影响具有固定架构的LSTM网络模型的性能。由图4可知:随着训练次数的增加,模型的均方根误差先增大后减小;在训练达到30次后,均方根误差基本趋于稳定,训练效果较好。在转向型和‘S’型两种航行场景下,在表3所示的训练次数范围内模型的均方根误差亦能达到稳定。
用同样的训练集和测试集对基础LSTM网络、一阶灰色模型GM(1,1)和反向传播神经网络(back propagation neural network, BPNN)进行实验,并将各种模型的预测效果进行对比。基础LSTM网络的参数设置同滑动窗口LSTM网络。一阶灰色模型的发展系数取值为0.5。基于文献[16]对BPNN进行参数选优,输入层和输出层神经元个数均取2,隐含层神经元个数取10。3种典型航行场景下不同模型对测试航迹点的预测结果见图5,其中用“SL-LSTM”代表滑动窗口LSTM网络,用“LSTM”代表基础LSTM网络。由图5可知:在直航型航行场景下,各种模型预测的航迹偏离程度均较低;在转向型和‘S’型航行场景下,随着预测航迹点数量的增加,滑动窗口LSTM网络预测结果仍较为接近实际航迹,基础LSTM网络预测结果逐渐偏离实际航迹,而GM(1,1)和BPNN预测结果出现较大偏差。
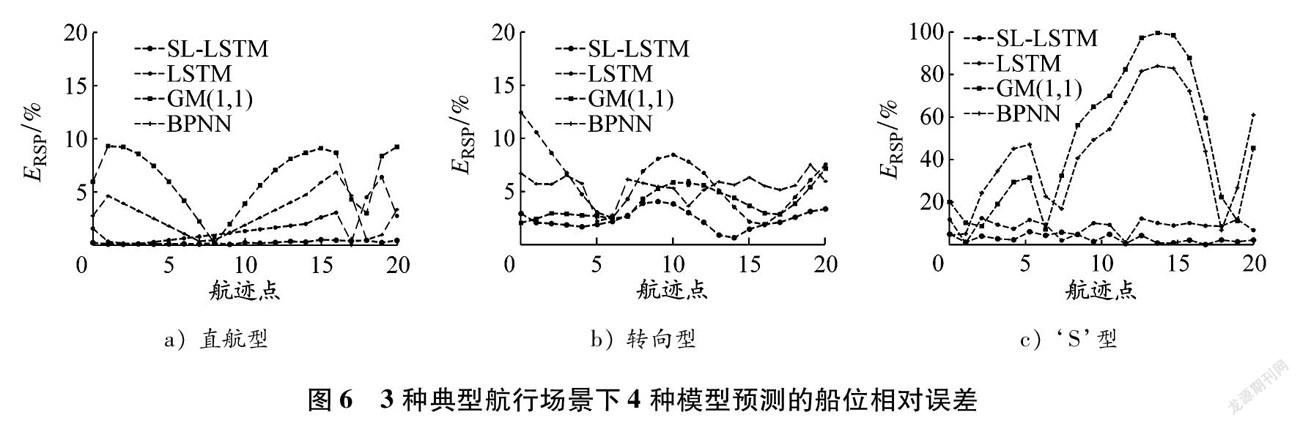
分析对单个航迹点预测的准确性,图6给出了3种典型航行场景下4种模型预测的各个航迹点的船位相对误差(ERSP)。由6可以看出:在直航型航行场景下,4种模型预测的ERSP均在10%以内,滑动窗口LSTM网络预测的ERSP始终保持在1%以下,基础LSTM网络和BPNN预测的ERSP随着航迹点数量
的增加而逐渐增大,GM(1,1)预测的ERSP波动最大;在转向型航行场景下,滑动窗口LSTM网络预测的ERSP在5%以内,GM(1,1)和BPNN预测的ERSP则在3%~10%范围内,基础LSTM网络预测的绝大多数航迹点的ERSP均在10%以内,仅两个航迹点的ERSP超过10%;在‘S’型航行场景下,基础LSTM网络预测的ERSP在10%左右,BPNN和GM(1,1)预测的ERSP已经出现极大波动,对部分航迹点预测的ERSP超过50%,滑动窗口LSTM网络对大部分航迹点预
测的ERSP在0~5%范围内,仅对3个航迹点预测的ERSP超过5%(且低于10%)。
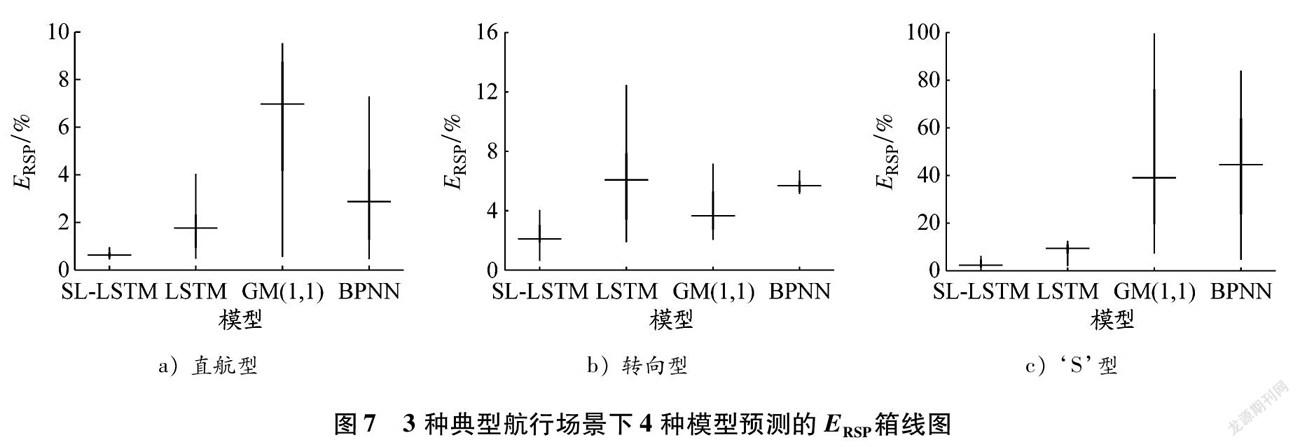
图7展示了3种典型航行场景下4种模型预测的ERSP总体分布。在直航型和‘S’型航行场景下,滑动窗口LSTM网络和基础LSTM网络的预测表现明显优于BPNN和GM(1,1)的;在转向型航行场景下,基础LSTM网络的预测表现同BPNN的,但劣于GM(1,1)的。由图6和7可知,在3种典型航行场景下,滑动窗口LSTM网络均可提供较为准确的单点预测,预测效果均优于其他3种模型的,BPNN和GM(1,1)在直航型和转向型航行场景下的表现尚可,基础LSTM网络在直航型和‘S’型航行场景下的预测表现良好。
为进一步量化模型的预测性能,计算出4种模型对相同测试集进行实验的平均绝对百分比误差(EMAP)、均方误差(EMS)和均方根误差(ERMS),见表4。由表4可知:直航型、转向型和‘S’型航行场景下滑动窗口LSTM网络预测的EMAP分别为0.176%、2.386%和2.927%,均远比其他模型的小,表明该模型预测准确性较高;滑动窗口LSTM网络预测的EMS和ERMS较小,表明该模型比其他3种模型稳定;在直航型和转向型航行场景下,基础LSTM网络与BPNN预测结果的EMAP、EMS和ERMS均较为接近;在‘S’型航行场景下,GM(1,1)和BPNN在各项评价指标上表现都很差。
综上可知,不同航行场景下滑动窗口LSTM网络的各类预测误差值均比其他3种模型的小,这表明本文提出的滑动窗口LSTM网络不仅可以更好地预测船位整体变化趋势,而且在较长时间内对单个航迹点的预测结果偏离实际的程度较低,提高了航迹预测的准确性。而基础LSTM网络,尽管在整体变化趋势的预测上表现尚可,但随着航迹点数量的增加该模型对单个航迹点的预测误差逐渐增大。
4 结束语
为提升目标水域船舶通航情况的监管效率,降低船舶航行风险,提出基于滑动窗口LSTM网络的航迹预测方法。结论如下:(1)针对船舶AIS数据存在异常的问题,基于对船位特征的空间变化阈值分析对离群点进行识别,剔除并补全相应航迹点数据,进而建立船舶航行状态数据库。基于船舶航向变化趋势建立的航行场景识别方法,可以作为表达船舶航迹特征的有效方法。(2)利用LSTM网络对时间序列数据预测性能良好的优势,建立基于滑动窗口LSTM网络的航迹预测模型。
滑动窗口LSTM
网络对直航型、转向型和‘S’型航迹预测的平均绝对百分比误差分别为0.176%、2.386%和2.927%,均遠小于基础LSTM网络、BPNN和GM(1,1)的预测误差。另外,滑动窗口LSTM网络预测的均方误差和均方根误差均较小,表明滑动窗口LSTM网络比其他3种模型稳定。在直航型、转向型和‘S’型3种典型航行场景下,滑动窗口LSTM网络不仅可以准确预测航迹变化趋势,而且对单个航迹点预测的偏离程度也很低,其表现明显优于基础LSTM网络、BPNN和GM(1,1)。
由于滑动窗口LSTM网络的航迹预测对数据量有一定的要求,未来研究中对于数据量较少的情况需要采用插值等方法增大数据量。本文提出的方法仅能对已经安装了AIS设备的船舶进行航迹预测,未来可考虑融合雷达等多源信息,以实现对水域内所有船舶的监管。
参考文献:
[1]ZHANG C K, BIN J C, WANG W, et al. AIS data driven general vessel destination prediction: a random forest based approach[J]. Transportation Research Part C, 2020, 118: 102729. DOI: 10.1016/j.trc.2020.102729.
[2]MURRAY B, PERERA L P. A dual linear autoencoder approach for vessel trajectory prediction using historical AIS data[J]. Ocean Engineering, 2020, 209: 107478. DOI: 10.1016/j.oceaneng.2020.107478.
[3]GAO M, SHI G Y. Ship-handling behavior pattern recognition using AIS sub-trajectory clustering analysis based on the T-SNE and spectral clustering algorithms[J]. Ocean Engineering, 2020, 205: 106919. DOI: 10.1016/j.oceaneng.2020.106919.
[4]HAO R, TEIXEIRA A P, SOARES C G. Ship trajectory uncertainty prediction based on a Gaussian process model[J]. Ocean Engineering, 2019, 182: 499-511. DOI: 10.1016/j.oceaneng.2019.04.024.
[5]ZHANG L Y, MENG Q. Probabilistic ship domain with applications to ship collision risk assessment[J]. Ocean Engineering, 2019, 186: 106130. DOI: 10.1016/j.oceaneng.2019.106130.
[6]PALLOTTA G, VESPE M, BRYAN K. Vessel pattern knowledge discovery from AIS data: a framework for anomaly detection and route prediction[J]. Entropy, 2013, 15: 2218-2245. DOI: 10.3390/e15062218.
[7]DE VRIES G K D, VAN SOMEREN M. Machine learning for vessel trajectories using compression, alignments and domain knowledge[J]. Expert Systems with Applications, 2012, 39: 13426-13439. DOI: 10.1016/j.eswa.2012.05.060.
[8]ZHANG S K, SHI G Y, LIU Z J, et al. Data-driven based automatic maritime routing from massive AIS trajectories in the face of disparity[J]. Ocean Engineering, 2018, 155: 240-250. DOI: 10.1016/j.oceaneng.2018.02.060.
[9]ZHOU Y, DAAMEN W, VELLINGA T, et al. Ship classification based on ship behavior clustering from AIS data[J]. Ocean Engineering, 2019, 175: 176-187. DOI: 10.1016/j.oceaneng.2019.02.005.
[10]周世波, 唐基宏, 熊振南. 基于优化模糊C均值算法的锚泊船聚集特性[J]. 交通运输工程学报, 2019, 19(6): 137-148. DOI: 10.19818/j.cnki.1671-1637.2019.06.013.
[11]LIU Y C, DUAN W Y, HUANG L M, et al. The input vector space optimization for LSTM deep learning model in real-time prediction of ship motions[J]. Ocean Engineering, 2020, 213: 107681. DOI: 10.1016/j.oceaneng.2020.107681.
[12]任宇翔, 赵建森, 刘卫, 等. 基于AIS数据和LSTM网络的船舶航行动态预测[J]. 上海海事大学学报, 2019, 40(3): 32-37. DOI: 10.13340/j.jsmu.2019.03.006.
[13]胡玉可, 夏维, 胡笑旋, 等. 基于循环神经网络的船舶航迹预测[J]. 系统工程与电子技术, 2020, 42(4): 871-877. DOI: 10.3969/j.issn.1001-506X.2020.04.18.
[14]SUO Y F, CHEN W K, CLARAMUNT C, et al. A ship trajectory prediction framework based on a recurrent neural network[J]. Sensors, 2020, 20: 5133. DOI: 10.3390/s20185133.
[15]ZHOU H, CHEN Y J, ZHANG S M. Ship trajectory prediction based on BP neural network[J]. Journal on Artificial Intelligence, 2019, 1(1): 29-36. DOI: 10.32604/jai.2019.05939.
[16]徐婷婷, 柳晓鸣, 杨鑫. 基于BP神经网络的船舶航迹实时预测[J]. 大连海事大学学报, 2012, 38(1): 9-11. DOI: 10.16411/j.cnki.issn1006-7736.2012.01.028.
[17]游兰, 韩雪薇, 何正伟, 等. 基于改进Seq2Seq的短时AIS轨迹序列预测模型[J]. 计算机科学, 2020, 47(9): 169-174. DOI: 10.11896/jsjkx.190800060.
[18]KIM K I, LEE K M. Context-aware information provisioning for vessel traffic service using rule-based and deep learning techniques[J]. International Journal of Fuzzy Logic and Intelligent Systems, 2018, 18(1): 13-19. DOI: 10.5391/IJFIS.2018.18.1.13.
[19]NIE Z H, SHEN F, XU D J,et al. An EMD-SVR model for short-term prediction of ship motion using mirror symmetry and SVR algorithms to eliminate EMD boundary effect[J]. Ocean Engineering, 2020, 217: 107927. DOI: 10.1016/j.oceaneng.2020.107927.
[20]劉娇, 史国友, 杨学钱, 等. 基于DE-SVM的船舶航迹预测模型[J]. 上海海事大学学报, 2020, 41(1): 34-39, 115. DOI: 10.13340/j.jsmu.2020.01.006.
[21]谢新连, 陈紫薇, 魏照坤, 等. 基于极限学习机的船舶航行行为预测[J]. 重庆交通大学学报(自然科学版), 2019, 38(8): 7-12, 123. DOI: 10.3969/j.issn.1674-0696.2019.08.02.
[22]ZHANG X D, CHENG L, ZHANG F L, et al. Evaluation of multi-source forcing datasets for drift trajectory prediction using Lagrangian models in the South China Sea[J]. Applied Ocean Research, 2020, 104: 102395. DOI: 10.1016/j.apor.2020.102395.
[23]PERERA L P. Navigation vector based ship maneuvering prediction[J]. Ocean Engineering, 2017, 138: 151-160. DOI: 10.1016/j.oceaneng.2017.04.017.
[24]王小凯, 朱小文. 计量检定中3种判别和剔除异常值的统计方法[J]. 中国测试, 2018, 44(增刊1): 47-50.
[25]CAI J X, HU J L, TANG X, et al. Deep historical long short-term memory network for action recognition[J]. Neurocomputing, 2020, 407: 428-438. DOI: 10.1016/j.neucom.2020.03.111.
(編辑 贾裙平)
收稿日期: 2020-12-05
修回日期: 2021-10-14
基金项目:
国家重点研发计划(2017YFC0805309);中央高校基本科研业务费专项资金(3132019303)
作者简介:
王余宽(1995—),男,河南周口人,博士研究生,研究方向为交通信息工程及控制,(E-mail)wangyk_321@163.com;
谢新连(1956—),男,辽宁大连人,教授,博导,博士,研究方向为交通运输规划与管理、船舶工程与经济,
(E-mail)xxlian@dlmu.edu.cn
