基于物料搬运三自由度气动机械手设计及夹紧气缸选用
2022-03-24左继红
莫 坚,左继红
(湖南铁道职业技术学院,湖南 株洲 412001)
0 引言
随着社会的发展及技术的高速发展,传统的人工搬运已经不能适应高温、易燃、易爆等恶劣环境,机械手作为一种新兴的技术慢慢应用在一些简单、重复、笨重及危险的操作中。
机械手有电动式机械手、油压机械手和气动式机械手3种。电动式机械手和液压机械手不能适应高温等恶劣环境。气动式机械手主要是用压力空气充入气缸推动活塞动作来完成这些简单、重复、笨重及危险的操作,具有结构简单、稳定可靠、成本较低、控制方便、过载保护等特点,因此还可设计一些动作较复杂的操作。
本文设计了三自由度物料搬运机械手,可以实现机械手的上下、前后、左右三个自由度动作,稳定可靠。
1 三自由度气动机械手结构
三自由度气动机械手主要由命令控制系统、位置检测系统、气压驱动系统、执行机构系统四部分组成,如图1所示。
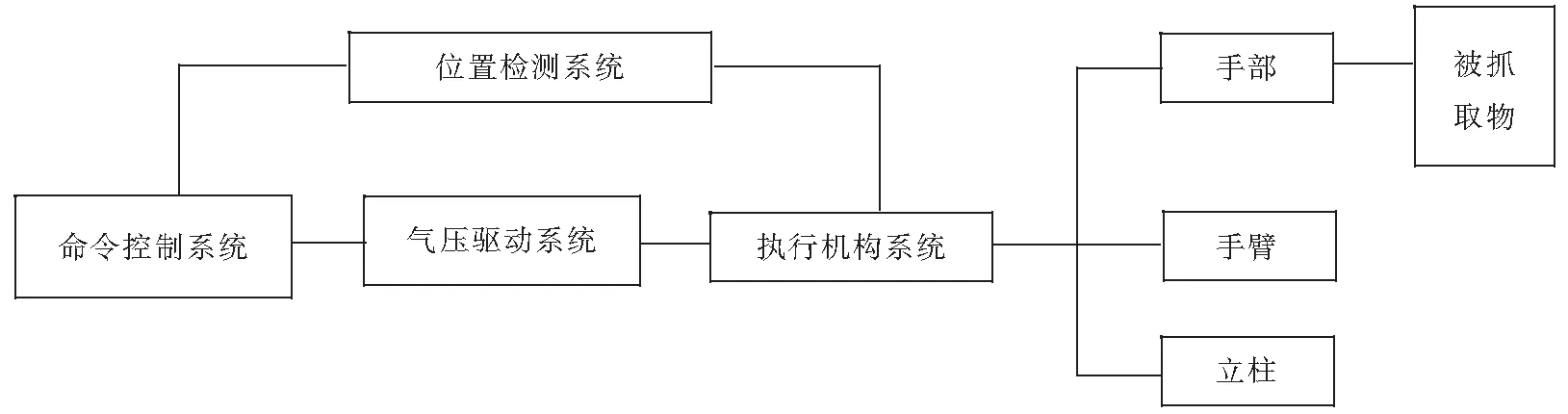
图1 气动机械手控制原理图
1.1 命令控制系统
本设计主要由PLC程序控制系统和定位系统两部分组成,主要操作如下:①LC程序控制系统发出控制指令(作业操作顺序、作业路线、作业时间及速度等)。②压力空气根据指令到达不同气缸(夹紧气缸、伸缩气缸、伸降气缸),从而可以控制上下、前后、左右三个自由度动作,还可以通过节流阀控制速度和时间。③位置检测系统监控过载、动作错误、系统故障等信息反馈到命令控制系统,从而重新调整命令。
1.2 气压驱动系统
本系统需要压力空气作为动力,包括空压机、干燥器、调压阀、夹紧气缸、伸缩气缸、升降气缸及其他部件。
1.3 位置检测装置
主要是位置检测监控过载、动作错误、系统故障等信息反馈到命令控制系统并根据命令不断调整,满足机械手的控制精度。
1.4 执行机构
1.4.1 手部
手部是搬运部件直接接触部位,有夹持式机器手和吸附式机器手2种,吸附式机器手成本较高,一般运用较少,采用的夹持式机器手由手指和传动力机构组成。手指有回转型和平移型2种运动方式,平移型运动方式结构复杂适合圆形部件。所以本文设计的为回转型手指的夹持式机器手,可以应用于不同的场合。传动力机构的主要工作任务是把手指的夹紧力传递到被抓取的部件。
1.4.2 手臂
吸附式机器手一般由气缸、连杆机构、气源等相互协调,控制手部来完成不同的动作,把物件搬运到指定的位置,是执行机构的重要部件。
1.4.3 立柱
立柱是支承手臂的部件,立柱也可以是手臂的一部分,手臂的回转运动和升降(或俯仰)运动均与立柱有密切的联系。机械手的立柱因工作需要,有时也可作横向移动,即称为可移式立柱。
1.4.4 机座
机座是机械手的基础部分,机械手执行机构的各部件和驱动系统均安装于机座上,起到支撑和连接的作用。
2 三自由度气动机械手结构原理
本文设计的三自由度气动机械手可以完成机械手的手臂的伸缩、手臂的上下、机械手的夹紧与旋转(原理见图2)。夹紧气缸由电控式二位五通阀7控制,线圈1Y得电,2Y失电,夹紧气缸排气机械手松开,线圈1Y失电,2Y得电,夹紧气缸充气机械手夹紧,快慢由11、12单向节流阀控制;伸缩气缸由电控式二位五通阀8控制,线圈3Y得电,4Y失电,夹紧气缸排气机械手手臂伸出,线圈3Y失电,4Y得电,伸缩气缸排气机械手手臂回缩,快慢由13、14单向节流阀控制;升降气缸由电控式二位五通阀9控制,线圈5Y得电,6Y失电,升降气缸充气机械手手臂上升,线圈5Y,失电6Y,得电升降气缸排气机械手手臂下降,快慢由15、16单向节流阀控制;电控式二位五通阀9控制回转气缸动作线圈7Y由电缸逆时针旋转,线圈8Y由电缸顺时针旋转。
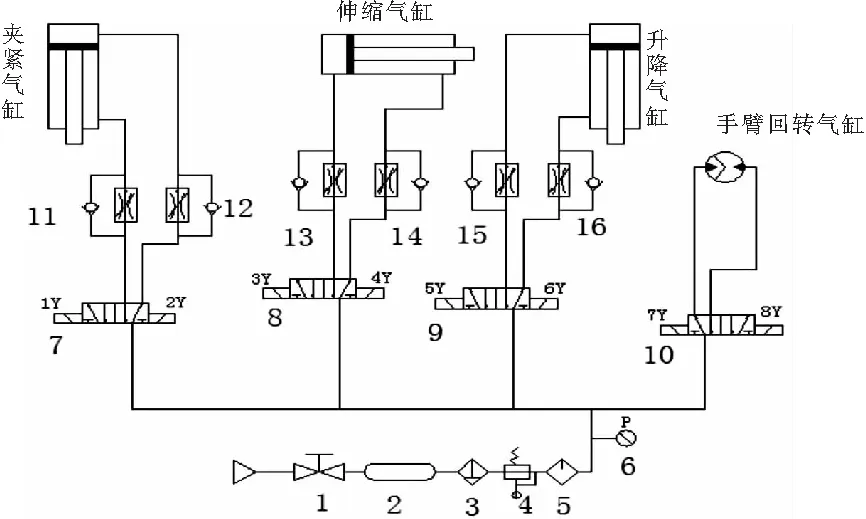
1—手动塞门(通断);2—总气缸;3—空气过滤器;4—调压阀;5—油雾过滤器;6—压力表;7、8、9、10—电控式二位五通阀;11、12、13、14、15、16—单向节流阀。
3 关键部件(夹紧气缸)设计
本设计要求设计的气动机械手满足系统功能要求,并且在恶劣环境条件下能够快速灵活准确地执行命令,在机械设计中尽可能选择标准件,减少非标零件的设计。气动机械手的整体结构如图3所示。本设计主要关键部件式机械手的夹紧力及驱动力计算,夹紧力及驱动力主要考虑夹紧气缸是否能耐受,所以夹紧气缸的选用尤为重要,本设计夹持重量:5 kg(g=9.8 N/kg)。

图3 气动机械手的整体结构
3.1 夹紧力计算


3.2 驱动力计算



3.3 夹紧气缸内径D计算
内径不低于37 mm,内径D取整40 mm。
3.4 夹紧气缸内径D取40 mm校核
因为:F气缸>F实际,经校核符合要求。
根据经验气缸内活塞杆直径d和气缸内径D比值一般0.2~0.3;气缸内活塞杆直径:d=(0.2~0.3)D=8~12 mm。圆整后,取活塞杆直径d=12 mm。
3.5 夹紧气缸缸筒外径计算
缸筒直接承受压缩空气压力,必须有一定厚度。一般气缸缸筒壁厚与内径之比小于或等于1/10,其壁厚可按薄壁筒公式计算:
δ=DPP/2[σ]
式中:δ为 缸筒壁厚,mm;D为气缸内径,40 mm;PP为实验压力,取PP=1.2 P=6×105Pa,缸筒材料为ZL3,[σ]=3 MPa,代入己知数据,则壁厚为:
δ=DPP/2[σ] =40×6×105/2×3×106=4 mm
取δ=4 mm,则缸筒外径为:D=40+4×2 =48 mm。
根据要求设计尽量选择标准间,经选择SC-40×50型的夹紧气缸满足要求。
4 结语
本文设计的三自由度物料搬运机械手适合在高温、易燃、易爆等恶劣环境下进行一些重复简单及笨重的工作。本文对控制原理及工作原理进行了分析,对关键部件进行了阐述,最后假定了最大抓取重量5 kg。对关键部件夹紧气缸进行了设计、计算、校核,并选用标准SC-40×50型夹紧气缸。
