地面无人装备环境感知能力评价方法研究
2022-03-23胡媛媛武云鹏宋泉良
胡媛媛,武云鹏,丁 玲,宋泉良
(北方自动控制技术研究所,太原 030006)
0 引言
在信息化武器装备发展趋势下,装备的试验过程已经不再局限于单一功能性能的测试验证,还需要从系统整体出发,全面、系统、科学地评价信息化武器装备的整体效能。地面无人装备是一种典型的集自主感知、路径规划、无线通信、有人无人协同等于一体的适用于高度信息化地面武器装备。涉及到传感器技术、信息融合技术、计算机技术、通讯技术、人工智能技术,以及自动控制技术等多学科多领域的高度信息化集合体。对地面无人装备的试验不仅需要在单一靶场单一环境下进行功能性能指标的检验,更需要考量在逼真于装备应用环境下的水文、气象、电磁等复杂环境下对无人装备的系统效能,同时也要着眼于验证无人装备在集群作战,有人无人战斗等联合作战编组中的体系作战能力,对地面无人装备的互操作性、可靠性、适用性、保障性等进行综合试验研究。
目前,美国国防部已就无人装备能力概念及其相关评价标准等概念围绕(department of defense architecture framework,DoDAF,美国国防部体系结构框架)的不断改进,形成了较完整且统一的基础理论,由于我国目前仍处于地面无人装备发展的初级阶段,还没有就装备能力特别是环境感知相关能力的综合评价方法展开深入研究,本文以美国国防部DoDAF V2.0 多视角框架为基础,借鉴当前有人装备能力评价方法,提出专属于地面无人装备的环境感知能力评价方法。
1 地面无人装备环境感知能力需求分析
地面无人装备由于加入了“智能”、“自主”、“远程操作”的特征,要求装备具备自适应各种复杂战场环境并进行侦查监视的能力。为了有效地完成无人作战任务,提高无人装备自身的生存能力,地面无人装备必须具备全方位的感知能力,构建战场机动地图,方能正确地完成避障自主探索、路径规划等决策,增强态势感知能力,有效减轻士兵认知负担和工作负荷。因此,本文将重点研究地面无人装备中环境感知能力的综合评价方法。
以作战应用为牵引,提炼地面无人装备环境感知相关能力需求,从单体装备性能出发,考虑无人装备在作战编组内的角色需求,结合与有人装备之间的相互配合、相互协调、相互补充的关系,将地面无人环境感知相关能力需求与具体的装备系统/单体功能、性能联系起来,建立合理的环境感知能力试验模型。
1.1 基于DoDAF 视角的环境感知能力需求获取
提炼地面无人装备执行作战任务过程中必须满足的环境感知方面的条件和能力,完成从作战任务到武器装备性能功能指标的映射。借鉴美国国防部DoDAF V2.0 多视角研究方法,通过分析作战任务使命及其实现过程,分别从作战视角、能力视角、系统视角分析地面无人装备的环境感知相关能力需求。
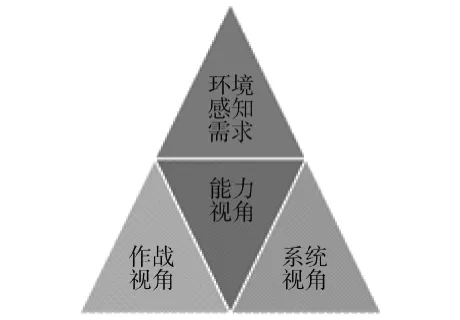
图1 基于DoDAF 的需求分析方法
作战视角是根据无人装备在执行作战任务的过程中,分析其可能接收到的作战使命或任务,结合其在作战编组中的角色,作战目标、以及作战规模等因素,细化其为了完成整体作战要求而需要执行的作战活动。以美军地面无人装备为例,根据重量将地面无人系统分为微型、小型、中型和大型地面无人系统,不同体量的无人装备使用的场合、在联合编组中承担的角色、需要完成的任务自然会有很大的区别,因此,需要从装备特色出发,从编组任务出发进行作战视角的需求分析。
能力视角是将无人装备执行作战活动过程中需要单体具备的能力进行抽象。能力视角下分析的内容主要包括完成任务所需的能力结构、支持资源及能力之间的相互作用等内容。当前我国无人装备的近期目标是利用无人车的耐久力实现长时间工作,在复杂地形或士兵侦察作战能力受限的情况下,进行持续侦察监视,进入人无法进入的地方,提高生存力,预留反应时间,利用人工智能减轻士兵的认知负担。
系统视角从装备内部出发,把作战需求和能力需求落实到实体装备上,从硬件设备、软件功能、系统运行各个方面,分析寻找各种可能影响装备整体效能的内部影响因素。目前无人装备环境感知能力相关的内部因素主要包括不同感知类型的传感器设备,车体姿态感知设备及其相应的感知融合算法等。
基于DoDAF 多视图方法,图2 内容展现了地面无人装备环境感知能力的提取过程:1)从任务视角出发,明确作战任务,利用作战任务分解作战活动过程,提炼与环境感知能力相关的作战任务。在当前地面无人装备的研究背景下,作战任务主要包括侦察监视任务、通信中继任务、毁伤评估任务;2)能力视角关联,建立作战任务/作战活动与能力之间的映射关系,形成初步的环境感知能力需求要素;3)系统视角细化,需要结合当前地面无人装备的装备特色及系统组成,进一步将能力扩展和细化,形成完整的环境感知能力评价层次关系图。这样梳理的环境感知能力需求,具有自上而下的逻辑关系和层次关系,将抽象的军事需求,转化为详细装备作战能力,映射到具体的装备试验指标中。地面无人装备环境感知能力细化结果如图3 所示。
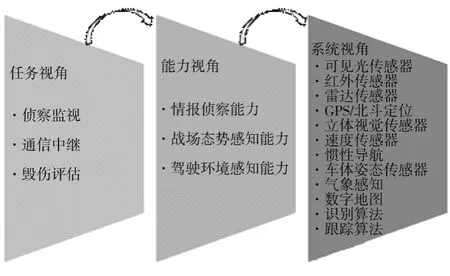
图2 环境感知能力需求获取
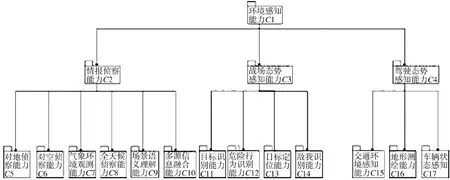
图3 地面无人装备环境感知能力细化
2 基于RIMER 方法的环境感知能力综合评价方法
2.1 RIMER 方法简介
在当前地面无人装备激烈的竞争形势下,为了快速了解不同参研方在同类无人装备竞争中环境感知能力方面的实际水平,急需一种综合性的试验考核方法。通过对环境感知能力的需求获取表明,各项环境感知能力的评价指标类型复杂(包含数值型、布尔型、语言描述型等),且指标的不确定程度也不尽相同。本文提出基于RIMER 方法(Rulebased Inference Methodology using the Evidential Reasoning,基于证据推理算法的信度规则库推理方法)的环境感知能力综合评价方法,能够在具体试验数据的基础上,结合有说服力且合理的主观评价,更加全面地评价装备环境感知性能。
RIMER 方法由曼彻斯特大学杨建波教授提出,该方法在D-S 证据理论的基础上,综合多属性决策理论、模糊理论和If-then 专家系统等理论的优点,具备对模糊数据、主观数据、概率型数据及无知信息等进行建模和分析的能力。尤其在处理不确定性数据上有较大的优势。
RIMER 评估方法通过构建信度规则库、输入数据规则激活度计算、证据推理规则合成3 个步骤实现。
2.2 信度规则库构建
2.2.1 层次化信度规则库构建
RIMER 方法的核心是构造能力对应的信度规则库,建立装备从设备级的技术战术指标到整体作战能力的信度规则约束,将系统视角下的指标性能-单项能力的映射评价-顶层综合能力联系起来,并将装备试验过程涉及到的专家知识、历史经验和试验数据关联起来。
层次化的能力需求应对应层次化的评价过程,本文为地面无人装备环境感知能力评价建立基于RIMER 方法递进式的信度规则库,如图4 所示。

图4 递进式能力信度规则库
由此获得地面无人装备环境感知信度规则库层次对应表,如下页表1 所示。
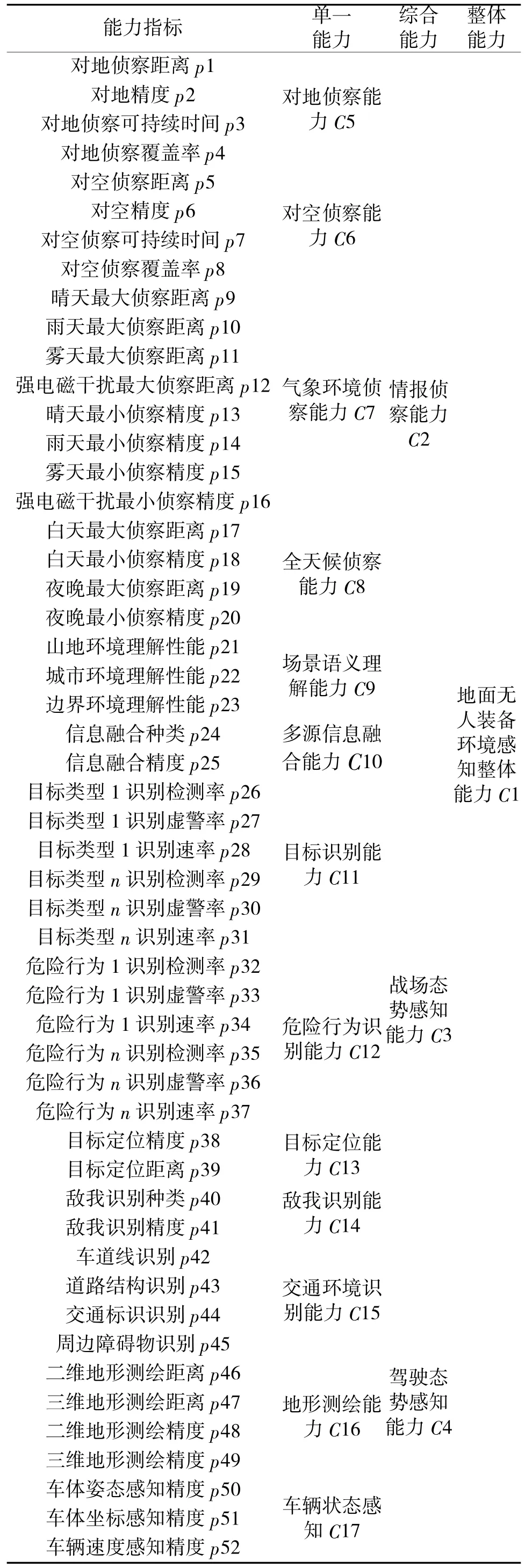
表1 环境感知能力信度规则递进关系
2.2.2 信度规则库结构说明
能力评估信度规则库可以表示为=<,,,>。其中,={,,…,C}表示各项能力的集合,={,,…,A}表示规则库与各项能力对应的取值集合,其中,A={A,A,…,A}表示能力A对应的能力指标的集合。={,,…,R}是所有评价结果的结合,表示前提条件和评价结果的映射函数。
信度规则库中每一条信度规则描述如下:
RIMER 系统本质上也是一个产生式的专家系统,在每条规则中需要通过专家经验等确定每一个前提条件的相对权重为δ,以及每一条规则在规则信度库中的相对权重θ。
对应到环境感知能力中,以对地侦察能力为例,该能力由<对地侦察距离性能1>,<对地侦察精度性能2>,<对地侦察可持续时间3>,<对地侦察覆盖率4>共同决定,其中一条信度规则可表达为:If<对地侦察距离>5 km>Λ<对地侦察精度<10 m>Λ<对地侦察可持续时间>24 h>Λ<对地侦察覆盖率>95%>
Then{(级优,1),(优,0),(中,0),(弱,0)}
2.3 输入指标规则激活度计算
2.3.1 输入能力规则匹配度计算
在实际试验过程中,能力评估的输入应为装备通过试验、调研、专家打分等过程获得的装备性能指标及各项能力评价结果。需要将这些数据通过规则匹配度计算获得该输入对当前信度规则库中相关规则的匹配程度。
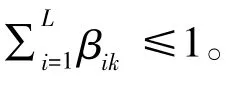
将输入数据表示为{(,),(,),(x,ε)},其中,x表示能力或能力指标的输入值,ε表示该输入的不确定性。其规则匹配度(x,ε)计算如下:
对于某项输入(x,ε),α表示与之相关的信度规则前提条件的第个取值A的综合匹配度。(x,A)为匹配函数,其计算方式规则前提中指标类型的不同而不同,针对环境感知能力评价过程中各项能力指标及子能力的规则前提假设分析,主要涉及到离散序列和定性分析两种类型,分别对其计算方法说明如下:
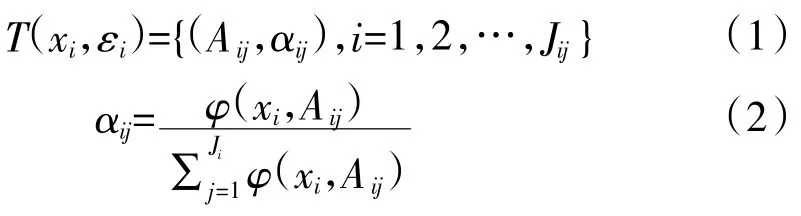
1)规则前提条件为离散序列
信度规则库中能力c的取值A为{A,A,…,A},且序列单调递增,匹配函数为:
例如:对地侦察能力中对空侦察距离1 取值范围为{1 000,3 000,5 000},(单位:m)。实际输入值为(4 000,1),则匹配值(4 000,1 000)=0,(4 000,3 000)=0.5,(4 000,5 000=0.5)。
2)规则前提为定性等级数据

若规则评价等级=输入能力评价等级,则可直接进行一一映射。如果≠,则依照专家经验将输入能力等级H’以信度λ等级等价于H,0≤λ≤1。
例如:场景语义理解能力中对山地环境语义理解能力取值包括{强,中,弱},输入数据为:((好,0.2),(中,0.8),(差,0),(无,0)),设置专家信度为[0.1,0.9,0,0],则通过计算其规则匹配度为((强,0.1),(中,0.9),(弱,0))。
2.3.2 输入能力信度规则综合匹配度计算


转换后的数据对第条规则归一化后的激活程度的算式为:

其中,θ为第条规则的相对权重,α为输入匹配第条规则的综合匹配度。
2.3.3 激活规则合成
在完成输入能力对单一规则的激活度计算后,需要将所有由输入能力激活的规则进行合成,由该层级的规则前提综合获得下一层级的能力评价结果。这一过程通过证据推理方法实现。

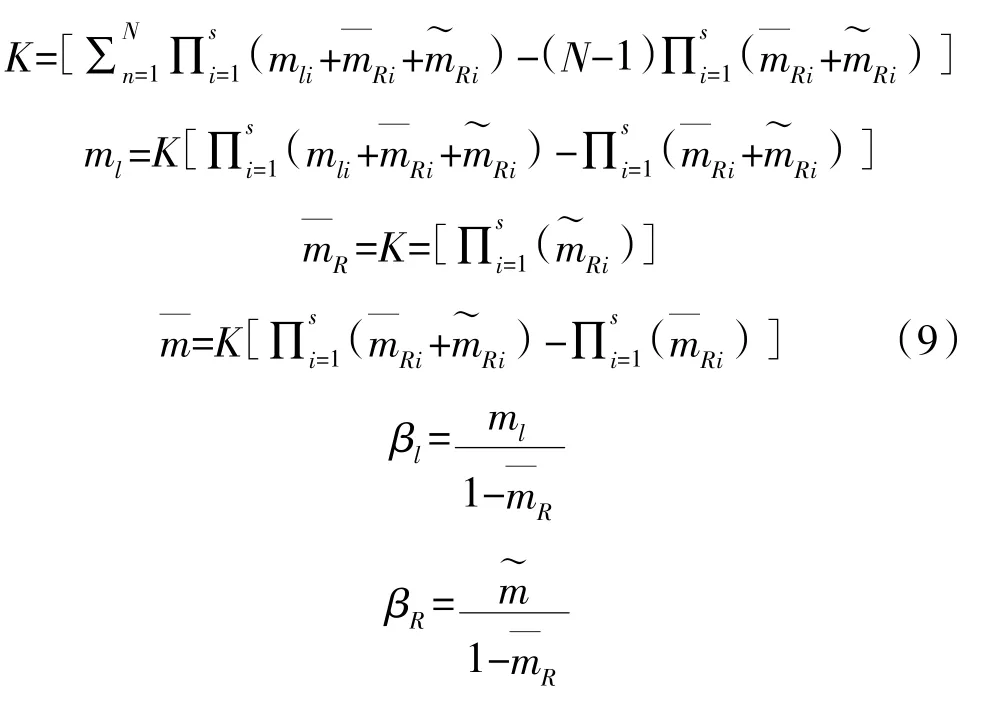
由上述过程即可实现完整的能力评价过程。
3 结论
本文研究的环境感知能力评价方法,从作战需求出发,将地面无人系统环境感知能力进行细化和分解,并映射到具体的装备性能上,然后将试验验证结果、专家经验和评价准则纳入统一的能力评价体系,能够在全面评估的同时,将不确定性数据带来的推理结论的不确定度进行综合考量,是一种全面、合理、有效的能力综合评价方法,能够推广到其他的能力评级或系统整体效能评估过程。
