基于改进ESO的磁悬浮系统模型参考滑模控制
2022-03-10蒋庆楠季晨光
胡 坤,蒋庆楠,季晨光,杨 健,李 飞
(1.安徽理工大学深部煤矿采动响应与灾害防控国家重点实验室,安徽 淮南 232001;2.安徽理工大学机械工程学院,安徽 淮南 232001)
带式输送机是重要的散料运输设备之一,被广泛应用于煤炭、化工、物流等领域的物料运输中。传统的带式输送机依靠托辊支撑输送带和物料。在其运行过程中,托辊与输送带发生挤压接触而造成的能耗约占输送机系统总能耗的70%[1]。为了降低能耗,提高输送机的经济性能,将磁力支撑系统代替原有的承载托辊组形成磁悬浮输送机已经成为一种新的研究方向。在磁悬浮技术的应用研究中,实现输送带和物料的稳定悬浮且具有良好的抗干扰能力是关键所在。因此,磁悬浮控制方法得到了广泛的关注。
悬浮系统具有开环不稳定性、非线性和时变性等,即使其在工作点具有线性化特点,但仍然是一个三阶不稳定系统。因此必须采用适当的控制方法来实现磁悬浮输送机的稳定运行。近几十年,国内外学者提出了一系列磁悬浮系统稳定性控制方法[2-6],常用的有状态反馈控制、PID(proportion-integral-differential,比例-积分-微分)控制、最优控制、鲁棒控制和模型预测控制等。这些控制方法都基于精确的磁悬浮系统模型,然而在实际的磁悬浮系统数学建模时存在着未建模动态和未知扰动的影响,并不能得到精确的磁悬浮系统模型,因此磁悬浮系统稳定控制方法的设计存在着一定的难度。
20世纪50年代发展起来的滑模变结构因结构简单,易于实现,对不确定性干扰具有良好的鲁棒性等特点[7,9],被广泛应用于各种控制对象中。如:Shieh等[10]根据磁悬浮系统的测量气隙,设计了滑模控制方法,减小了系统的不确定性对系统性能的影响,提高了磁悬浮系统的鲁棒性,但未能很好地解决系统抖振现象;刘春芳等[11]采用模糊滑模控制方法,根据电磁悬浮系统的动态非线性数学模型,设计了系统滑模面,通过等效控制和切换控制实现了对参数摄动和外部扰动的完全鲁棒性,但模糊规则的建立需要很丰富的专家经验,这对磁悬浮输送带的控制具有一定的难度。
近年来,观测器理论发展迅速,其在状态与干扰未知的系统中得到了广泛的应用。如:申永鹏等[12]将扩展滑模观测器用于永磁同步电机无位置传感器的控制,比传统滑模观测器更能消除系统的抖振,并且观测精确度受转速变化的影响较小,系统具有更高的观测精确度和更好的动态性能,并经实验证明,通过选择合适的观测器可以有效估计传感器测量带来的误差以及未知的外部干扰。观测器与控制器相结合的控制方法已经得到了越来越多的应用[13-17]。因此,利用基于干扰观测器的滑模控制方法来消除磁悬浮系统的抖振和干扰将成为可能。
笔者基于改进的永磁-电磁混合U型电磁铁模型,提出一种基于非线性扩张状态观测器(extend state observer,ESO)的模型参考改进滑模控制策略。首先,将改进的幂次趋近律应用于滑模控制,对参考模型进行轨迹跟踪设计;其次,针对状态方程的非匹配不确定项和未知外部干扰,利用非线性ESO进行观测,将观测到的干扰对系统进行补偿,以减小系统的抖振,增强系统的鲁棒性能;最后,通过仿真分析来验证该方法的鲁棒性和优越性。
1 磁悬浮输送带的动力学模型
1.1 磁悬浮输送带的工作原理及电磁结构
磁悬浮带式输送机的结构如图1所示。其中磁悬浮系统主要由混合电磁铁、输送带、导磁体悬挂装置、限位滚轮、机架和托辊组组成。该系统由混合电磁铁提供的磁力吸引导磁体悬挂装置从而使输送带悬浮起来,使其脱离托辊组的支撑;限位滚轮防止输送带左右移动引起的跑偏,两端的驱动滚筒提供纵向驱动力使输送带纵向移动;通过调节电磁铁电流的大小和方向来改变电磁力,当电磁力与输送带和物料所受重力相等时,输送带与辅助托辊不再接触,从而消除了摩擦力及摩擦带来的能耗。

图1 磁悬浮带式输送机的结构Fig.1 Structure of magnetic levitation belt conveyor
混合电磁铁的结构和布置将直接影响输送机电磁力的大小及其控制系统的设计。永磁体在电磁铁中的安装方式有2种:一种是将永磁体安装在铁芯中间,这样永磁体可以得到很好的保护,但是其接触面积受到了限制[18];另一种是将永磁体安装在电磁铁磁极的两端,这样虽然磁路长度可以不受限制,但是永磁体离悬浮物很近而得不到很好的保护[19]。综合输送带的应用环境,设计的永磁-电磁混合电磁铁结构如图2所示。将永磁体安装在铁芯中间,并使永磁体与磁路的接触面积得到扩大,以提供更大的永磁力并且可以得到很好的保护;同时,在电磁铁磁极两端增大气隙接触面积,以提供更大的磁吸力,而且这种T形翼缘可以提高电磁铁极板的刚度[20],也使得电磁铁的线圈不会轻易碰到悬浮物。

图2 永磁-电磁混合电磁铁的结构Fig.2 Structure of permanent magnet-electromagnetic hybrid electromagnet
1.2 永磁-电磁混合电磁铁的数学模型
根据等效磁路法求永磁-电磁混合电磁铁的动力学模型。设电磁铁两极的线圈匝数均为N/2,磁铁与导磁体之间的气隙为z(t),线圈的电压为u(t),线圈的电流为i(t),永磁体的厚度为hpm,永磁体与磁路接触的有效面积为s1,永磁体的矫顽力为Hc,永磁体的导磁率为μ,混合电磁铁的总质量为m,重力加速度为g,电磁铁磁极面积为s2;并作出如下假设:
1)忽略电磁绕组和永磁体的漏磁通;
2)磁力线简化为直线和圆弧线,并忽略磁路饱和;
3)忽略导磁体和铁芯的磁阻。
求解得到磁悬浮结构对导磁体的电磁力F(z,i)为:
式中:μ0为空气磁导率;μr=μ/μ0,为永磁体的相对磁导率。
电磁铁绕组回路的电压方程为:
式中:R为电磁铁电阻;Nn为电磁铁匝数;Φ(z,i)为气隙磁通。
对电磁铁进行受力分析,可得其动态模态方程组为:

式中:f(t)为外界干扰量;(z0,i0)为系统状态平衡点。
将式(1)在系统状态平衡点(z0,i0)处进行泰勒展开,线性化后代入方程组(3),可得:

以电压作为输入变量,磁悬浮气隙为输出变量,选择(Δz,Δz˙,Δi)T作为状态变量,可得到如下状态方程:

1.3 磁悬浮系统开环模型
由式(4)的力学和电压方程可以得到以电压为控制输入、气隙为控制输出的磁悬浮开环系统传递函数:

由劳斯判据可知该开环系统具有不稳定性,且是一个三阶不稳定系统。为了降低系统模型的阶数,引入电流反馈,以电磁铁线圈绕组的电流为控制输入量,气隙为输出量,建立具有电流反馈的磁悬浮开环系统,如图3所示。其中:ka为功率放大器增益系数,ky为传感器增益系数。

图3 具有电流反馈的磁悬浮开环系统Fig.3 Magnetic levitation open-loop system with current feedback
由图3可以得到新的磁悬浮开环系统传递函数:

根据式(7)可知,虽然通过加入电流反馈降低了系统模型的阶数,但系统仍然具有不稳定性。因此,对磁悬浮开环系统进行控制器的设计,以增强其稳定性。
2 磁悬浮系统控制器的设计
2.1 控制器总体设计
磁悬浮系统控制器的设计如图4所示。其中,磁悬浮系统参考模型的输入um是基于滑模控制器(sliding mode control,SMC)设计的,使得参考模型能够输出一个无干扰和不确定因素的参考气隙信号xm。该输出信号更加连续,更容易被磁悬浮系统跟踪,也更加具有稳定性。新型滑模控制器基于参考模型的输出和改进ESO进行设计,其中ESO用于对系统未建模动态和未知干扰进行估计,将估计的状态加入滑模控制器,使滑模控制器具有较好的鲁棒性。同时,将估计的干扰d^补偿到控制律中,以改善控制系统的动态性能。

图4 磁悬浮系统控制器的设计Fig.4 Design of magnetic levitation system controller
2.2 参考模型及控制器设计
磁悬浮参考模型的设计直接影响到滑模控制的状态跟踪问题,以x=(Δz,Δz˙)T为状态,电流为输入,气隙变化量为输出,建立磁悬浮系统的参考模型:

式中:Am、Bm均为参考模型的标准值。
针对参考模型(8),设计滑模面s为:

式中:c为大于0的常数;xr和x˙r分别为给定的气隙间距及其导数;xm1-xr为气隙的跟踪误差,记 xm2=x˙m1。
采用削弱抖振的指数趋近律设计参考模型的控制律:

式中:ζ、k均为常数,ζ>0,k>0。
结合式(8)可得参考模型的控制律为:

式中:am3、am4和bm2均为常数,可由磁悬浮系统模型求出。
2.3 基于新型趋近律的滑模控制器设计
为了削弱磁悬浮系统的抖振,根据磁悬浮系统状态距滑模面的距离设计不同的趋近速度,故在幂次趋近律和指数趋近律的基础上采用分段函数的形式设计滑模控制的趋近律。设计的新型滑模趋近律为:

式中:k1,k2,k3,k4,λ均为大于零的常数,∂>1,0<β<1,并且所有参数可调;x2为系统的状态变量。

当系统的运动点进入滑模状态时,采用Lyapunov稳定性理论来求证系统的稳定性。由新型分段趋近律的设计可知,新型趋近律是幂次趋近律与等速趋近律的组合形式,故Lyapunov函数的导数˙恒满足:

可见新设计的趋近律可以满足渐进稳定的要求。
在新型趋近律的基础上,滑模控制器的滑模面设计为:

式中:b2为控制输入系数;a21为磁悬浮系统状态方程x1的系数。
式(16)是在未考虑未建模动态和外部干扰的情况下得出的,会影响滑模控制器输出的准确性,故须对系统状态和干扰进行估计。
3 改进ESO设计及估计误差分析和实时补偿
针对所求的磁悬浮系统模型存在着未建模动态和未知干扰的影响,采用ESO对系统状态和未知干扰进行估计,并将估计的状态加入所设计的新型滑模控制器中,对估计的干扰进行系统补偿,以减小系统不确定性带来的影响,进而提高系统的鲁棒性。
3.1 ESO设计
磁悬浮系统状态方程为:

式中:d(t)为未建模动态和外界扰动。
定义扩张状态x3=d(t),设d(t)的导数存在且有界,记ψ=d˙(t),则可增广为:
令zi(i=1,2,3)为系统中状态变量xi的观测值,定义观测误差e0i=zi-xi,故ESO设计为:
式中:β1、β2、β3均为观测器增益。
通过调节β1、β2、β3使得系统趋于稳定。
3.2 ESO估计误差分析
当系统稳定工作时,x3为一个常数,此时ψ=0,则观测值与真实值之间的误差为:
对式(20)进行拉氏变换,可得:

对式(21)进行整理,可得误差模型的特征多项式为:

通过选择合适的β=[β1β2β3]T,使得特征多项式满足Hurwitz稳定。根据劳斯判据可得:

可以通过调节β1、β2、β3的值使得不等式组(23)成立。
3.3 改进的fal(·)函数
单纯地采用状态误差对状态和干扰进行估计,不能达到一种有效的跟踪效果。使用fal(·)函数代替误差,虽然可以有一个很好的效果,但是该函数在原点周围连续不可导,故本文采用拟合的思路设计一种新的函数代替fal(·)函数,使得非线性函数在原点周围具有良好的连续性、可导性和平滑性。
当|e|≤δ时,对非线性函数fal(·)进行改进,即在反双曲正弦函数的基础上构造拟合函数newfal(e,α,δ),其表达式为:

式中:e为状态误差;α为可调参数;δ为线性段区间长度。
根据拟合函数连续性和可导性的要求,所设计的参数l1,l2,l3须满足:

将求得的参数l1、l2、l3代入newfal(·)函数,则有:

为了验证所设计的newfal(·)函数的性能,对newfal(·)进行仿真。1)当δ=0.01时,分别取α=0,0.25,0.50,对newfal(·)函数进行仿真验证;2)当α=0.25时,分别取δ=0.01,0.05,0.1,对newfal(·)函数进行仿真;3)取δ=0.01,α=0.25,分别对fan(·),fal(·),newfal(·)函数进行仿真对比。仿真结果如图5所示。
由图5(a)可知:α影响newfal(·)的幅值变化大小,α越大,斜率越大,输出值变化越快;由图5(b)可知:δ影响函数的非线性,其值越大,函数的非线性越强;由图5(c)可知,newfal(·)函数在原点附近更加光滑,更符合ESO的要求。

图5 函数性能仿真结果Fig.5 Function performanc simulation results
综上所述,改进后的newfal(·)函数可以满足设计要求。选择δ=0.01,α=0.25进行控制仿真设计。
当观测器收敛时,z3就是未建模动态和扰动的综合估计值,可以对控制输入进行补偿以消除扰动。因此,设计如下的控制律:

式中:u为扰动补偿后新型滑模控制器的输出;z3/b0为ESO测得的总扰动实时补偿,取b0=b2。
4 磁悬浮控制仿真研究
以电磁铁的输出电流i为输入量、输送带的位置经传感器检测后获得的输出电压u为输出量建立磁悬浮控制系统并进行性能仿真。其中位置传感器采用一维PSD(position sensitive detector,位置敏感检测器),其增益为346.8 V/m。仿真中混合电磁铁的结构参数如表1所示。

表1 混合电磁铁结构参数Table 1 Structural parameters of hybrid electromagnet
利用Simulink/R2018a仿真软件对混合磁悬浮控制系统进行仿真。在利用不同方法的控制仿真中,相同参数设为同一数值。设置ESO参数为:β1=1 000,β2=33 000,β3=3 320 000,滑模控制器参数为:k1=150,k2=20,k3=150,k4=80,∂=2,β=0.5,λ=1,c1=900 000,c2=3 200,ke=60 000 000。SMC表示基于指数趋近律的滑模控制器,ISMC表示基于改进趋近律的滑模控制器,ESO-ISMC表示结合了改进ESO的ISMC控制器。
1)比较在3种控制策略下模型参考输入时磁悬浮系统的响应性能。设定xr=33 mm,在3种控制策略下磁悬浮系统气隙和速度的响应曲线分别如图6、图7所示。由图6可知:在SMC控制下,气隙与设定值有4 mm的偏差,说明磁悬浮系统不能很好地跟踪轨迹;在ISMC控制下,虽然系统可以很好地跟踪设定气隙,但是出现了抖振现象;只有在ESOISMC控制下系统才能较好地跟踪设定轨迹且无抖振出现。在图7中,z2ESO-ISMC为观测器估计的速度,可知其比在ESO-ISMC控制下输出的速度更加连续。因此在无干扰状态下,ESO-ISMC的控制效果较好。

图6 模型参考输入下磁悬浮系统气隙响应曲线Fig.6 Air gap response curve of magnetic levitation system under model reference input

图7 模型参考输入下磁悬浮系统的速度响应曲线Fig.7 Speed response curve of magnetic levitation system under model reference input
2)比较在ESO-ISMC控制下恒定气隙输入和模型参考气隙输入时磁悬浮系统的响应性能。为了更好地对比2种不同输入时系统的响应性能,对参考模型作出适当修改,使在2种给定输入下系统具有相同的响应速度。2种不同输入下磁悬浮系统气隙和速度的响应曲线分别如图8、图9所示。从图8可知:系统能在0.04 s后达到平衡,但在恒定气隙输入时系统的气隙响应超调量为33.33%,而在模型参考气隙输入时气隙响应超调量为18.18%,降低了15.15%。其次,由图7、图9可知,不同的参考模型可以使系统具有不同的响应速度,因此,可以通过调节参考模型使系统拥有不同的响应速度,以满足系统不同的控制需要,这比恒定气隙输入更具优良性。

图8 不同输入下磁悬浮系统的气隙响应曲线Fig.8 Air gap response curve of magnetic levitation system under different inputs

图9 不同输入下磁悬浮系统的速度响应曲线Fig.9 Speed response curve of magnetic levitation system under different inputs
3)比较3种控制器的抗干扰性能。分别用阶跃信号和随机信号模拟磁悬浮系统受到重载变化和物料碰撞的干扰。在阶跃干扰和随机干扰时磁悬浮系统的气隙响应曲线分别如图10、图11所示。由图10可知:在阶跃干扰时,在SMC控制下系统需要更多的时间达到平衡点;在ISMC和ESO-ISMC控制下系统恢复时间更快,且系统具有相同的超调量,当达到平衡时在ISMC控制下系统仍有轻微的抖振出现。由图11可知:在随机干扰时,SMC的控制效果较差,在ISMC控制下系统抖振现象较严重,故ESO-ISMC具有较好的抗扰性能。

图10 阶跃扰动时磁悬浮系统的气隙响应曲线Fig.10 Air gap response curve of magnetic levitation system under step disturbance
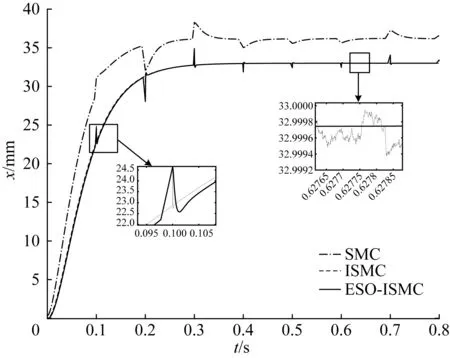
图11 随机扰动时磁悬浮系统的气隙响应曲线Fig.11 Air gap response curve of magnetic levitation system under random disturbance
4)比较3种控制方法在模型失配情况下的控制效果。模型失配时磁悬浮系统的气隙响应曲线分别如图12、图13所示。由图12可知:分别在0.4,0.5和0.6 s时改变对象模型,在ISMC和ESO-ISMC控制下系统均有很好的控制效果,在ISMC控制下系统达到稳定更快,但是系统抖振现象比较严重。由图13可知:在模型失配情况下,在0.4 s时出现气隙异常突变时,在SMC控制下系统达到-7.2×1012mm后虽然后期能够恢复到稳定平衡气隙,但是突变气隙值远远超过实际气隙变化范围,说明在模型失配情况下SMC控制失效。

图12 模型失配时磁悬浮系统的气隙响应曲线Fig.12 Air gap response curve of magnetic levitation system under model mismatch

图13 SMC控制下模型失配时磁悬浮系统的气隙响应曲线Fig.13 Air gap response curve of magnetic levitation system controlled by SMC under model mismatch
5)在ESO-ISMC控制下磁悬浮系统的电流如图14所示。由图可知,电流虽然偏离了设定值,但能够很快达到稳定,输送带比只有电磁铁进行控制时节能。

图14 ESO-ISMC控制下磁悬浮系统的电流变化Fig.14 Current variation of magnetic levitation system controlled by ESO-ISMC
5 结 论
针对磁悬浮系统的开环不稳定性以及滑模控制中的抖振现象,提出了一种模型参考滑模控制与基于改进趋近律的滑模控制相结合的控制策略。设计了永磁-电磁混合结构、新的非线性函数newfal(·)和模型参考改进滑模控制方法。将所设计的控制策略分别与传统磁悬浮滑模控制、基于改进趋近律的磁悬浮滑模控制进行仿真对比,结果表明:加入改进ESO可以有效减弱滑模控制带来的抖振;在模型参考输入的情况下,磁悬浮系统具有较小的超调量和较优的跟踪性能;面对不同情况下的外界干扰,ISMC和ESOISMC使系统恢复时间更快,ESO-ISMC使系统具有极小的系统抖振。所设计的控制策略能极大提高磁悬浮系统的稳定性,对磁悬浮输送机的输送带悬浮控制具有一定的参考价值。
