基于图像识别的波纹补偿器轴向尺寸检测方法
2022-03-10李宝志倪洪启林思雨孟宪春
李宝志,倪洪启,林思雨,孟宪春
(1.沈阳化工大学机械与动力工程学院,辽宁 沈阳 110142;2.秦皇岛北方管业有限公司波纹膨胀节与金属软管技术创新中心,河北 秦皇岛 066004)
目前,工业管道中波纹补偿器的轴向位移检测均是通过位移传感器实现的。随着生产力与科学技术的日益发展,位移传感器在波纹补偿器位移检测应用中的弊端逐渐显露:由于波纹补偿器形状的特殊性以及位移传感器安装位置的局限性,位移传感器仅能测量波纹补偿器因压缩或拉伸而产生的整体轴向位移,而无法测出其相邻波纹之间的位移[1]。若波纹补偿器在服役过程中,其相邻波纹之间轴向位移变化的不均匀程度超过一定限度,但相关工作人员因不知晓具体变化情况而不采取相应的安全措施,则会导致波纹补偿器发生失稳变形,甚至直接损坏。
图像识别检测技术是一种非接触式无损检测技术,具有检测速度快、精度高、成本低和相机标定方便等特点,其广泛应用于零件检测以及故障监测等领域[2-4]。基于此,笔者提出了一种基于图像识别的波纹补偿器轴向尺寸检测方法:首先利用CCD(charge coupled device,电荷耦合器件)工业相机获取波纹补偿器的图像,然后将图像数据传送至PC(personal computer,个人计算机)端的软件平台进行分析处理,最后计算波纹补偿器的整体轴向尺寸以及其相邻波纹之间的轴向尺寸。该方法旨在解决传统检测方法因无法检测到相邻波纹之间轴向位移变化不均匀而造成波纹补偿器损坏的问题。
1 波纹补偿器轴向尺寸检测总体方案
基于图像识别的波纹补偿器轴向尺寸检测流程(见图1)具体如下:利用CCD工业相机获取如图2所示的波纹补偿器图像,将图像数据发送至PC端后,采用MATLAB软件调用图像信息,并对图像进行高斯滤波平滑处理、基于Sobel算子的边缘检测、灰度化处理、Otsu算法阈值分割处理以及图像取反和孔洞填充等操作,得到目标灰度值为1、背景灰度值为0的理想二值化图像,最后对二值化图像中灰度值为1的部分进行上下、左右边缘特征点检测,从而计算得到波纹补偿器的整体轴向尺寸以及其相邻波纹之间的轴向尺寸[5]。
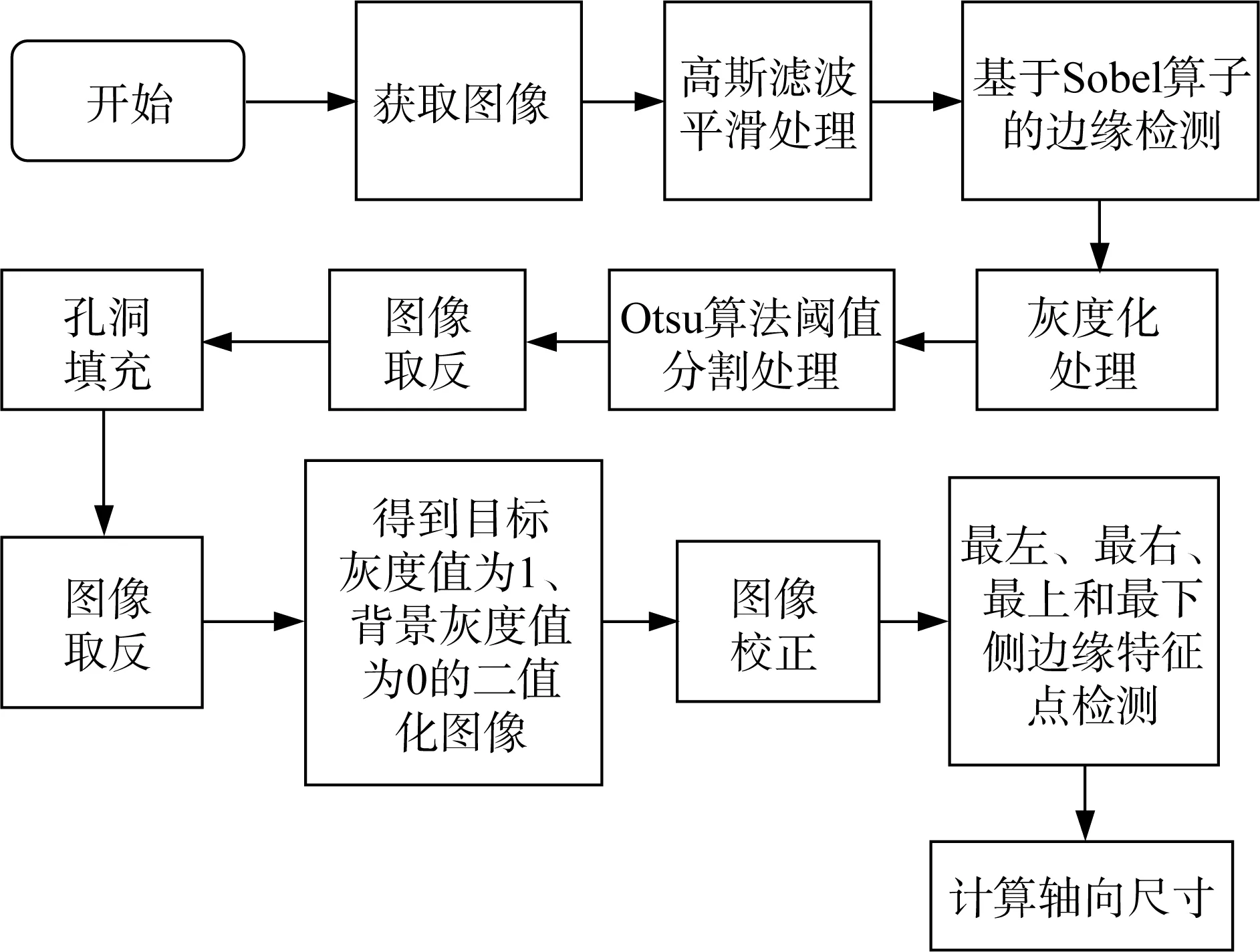
图1 基于图像识别的波纹补偿器轴向尺寸检测流程Fig.1 Axial dimension detection process of corrugated compensator based on image recognition
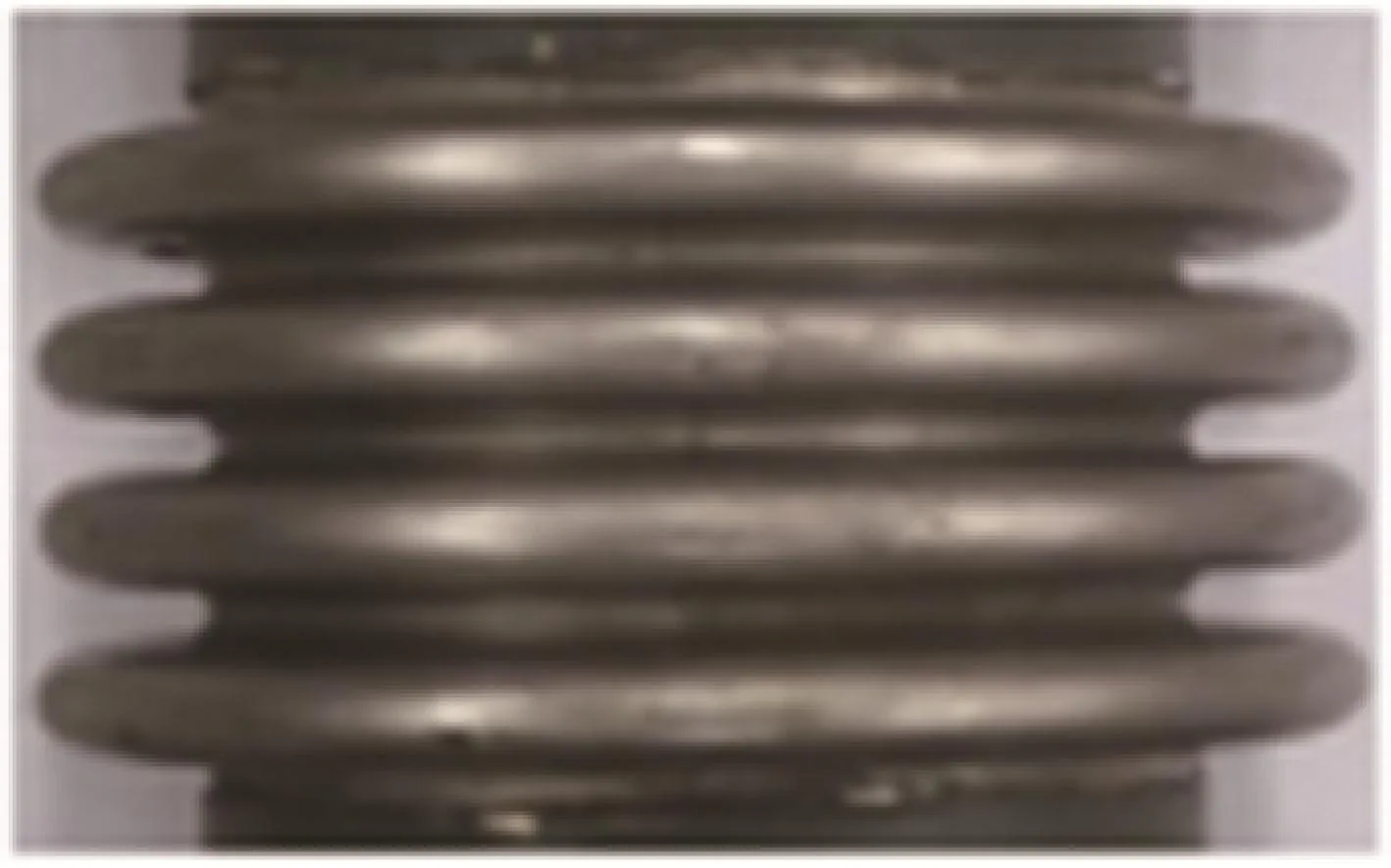
图2 CCD工业相机采集的波纹补偿器图像Fig.2 Corrugated compensator image collected by CCD industrial camera
2 波纹补偿器图像处理
2.1 图像平滑处理
由于照明不良以及波纹补偿器高温工作环境的影响,CCD工业相机采集的图像不可避免地会产生大量的高斯噪声,使得图像的质量降低,从而影响后续的边缘检测。因此,须选择滤波器对CCD工业相机采集的波纹补偿器图像进行平滑处理,以减少或消除噪声的干扰。常用的滤波方式有中值滤波、均值滤波和高斯滤波等。
2.1.1 中值滤波
中值滤波是使用1个围绕当前元素的矩形来查找图像区域内的像素中值,并用该中值替换矩形内的其他像素点。中值滤波公式如下:

式中:g1(x,y)为中值滤波后的图像;f(x,y)为原始图像;S为模板窗口;i、j分别为模板窗口的水平尺寸和垂直尺寸。
中值滤波对于去除散射噪声干扰的效果非常理想,但是对高斯噪声的处理能力非常差。
2.1.2 均值滤波
均值滤波是先给定图像上目标像素的模板(包含目标像素周围的相邻像素),再利用该模板中所有像素的平均值来代替原来的像素值。均值滤波公式如下:

式中:g2(x,y)为均值滤波后的图像;M为给定模板中像素的总个数。
均值滤波器在工作过程中会使图像边缘信息模糊,从而丢失较多边缘特征,且其通常用于消除椒盐噪声。因此,均值滤波不适用于波纹补偿器图像的平滑处理。
2.1.3 高斯滤波
高斯滤波是利用二维高斯函数的分布方式来对图像进行平滑处理。其中,二维高斯函数是旋转对称的,其在各个方向上的平滑程度相同,不会改变原始图像的边缘走向;此外,高斯函数是单值函数,高斯卷积核的锚点为极值,在所有方向上单调递减,锚点像素不会受距离锚点较远的像素点的影响,保证了特征点和边缘的特性;同时,在频域上,高斯滤波过程中不会被高频信号污染[6-7]。
由于中值滤波和均值滤波等滤波器不能很好地消除高斯噪声,甚至在滤波过程中会使图像边缘模糊,本文选择高斯滤波器对波纹补偿器图像进行平滑处理,其计算公式如下:

式中:g3(x,y)为高斯滤波后的图像;σ为标准差。
在利用二维高斯滤波器对图像进行平滑处理时,最重要的是标准差σ的选取,σ越大,则高斯滤波器的频带越宽,即平滑程度越好。本文取σ2=2,采用[5,5]为模板,经整数化、归一化后得到的高斯模糊值如表1所示。基于得到的高斯模糊值,对采集的波纹补偿器原始图像进行高斯滤波平滑处理,结果如图3所示。

表1 不同像素点对应的高斯模糊值Table 1 Gaussian blur values corresponding to different pixels

图3 高斯滤波平滑处理后的波纹补偿器图像Fig.3 Corrugated compensator image smoothed by Gaussian filter
由图3可以看出,高斯滤波器能很好地消除波纹补偿器图像中的高斯噪声,减少了图像中不必要的细节以及孤立的像素点和像素块,较好地保留了边缘特征信息,对下一步获取理想边缘有极大的帮助。
2.2 图像边缘检测
图像边缘检测的目的是剔除不相关的信息,保留图像中重要的结构属性,以大幅减少数据量。常用的边缘检测算子有Canny算子、Sobel算子等。
2.2.1 基于Canny算子的边缘检测
Canny算子是最常用的边缘检测算子之一。基于Canny算子的图像边缘检测步骤具体如下:
1)利用高斯滤波对图像进行平滑处理,以消除噪声的影响。
2)求取图像边界的梯度幅值和方向,初步确定边界。
3)进行非极大值抑制,去除非边界上的点。
4)设置高、低阈值,确定真正边界。
Canny算子自带双阈值分割效果,可直接获得二值化图像。设置高斯滤波器中的σ2=2,高、低阈值分别为100和50,在MATLAB平台中利用Canny算子对波纹补偿器原始图像进行边缘检测,结果如图4所示。
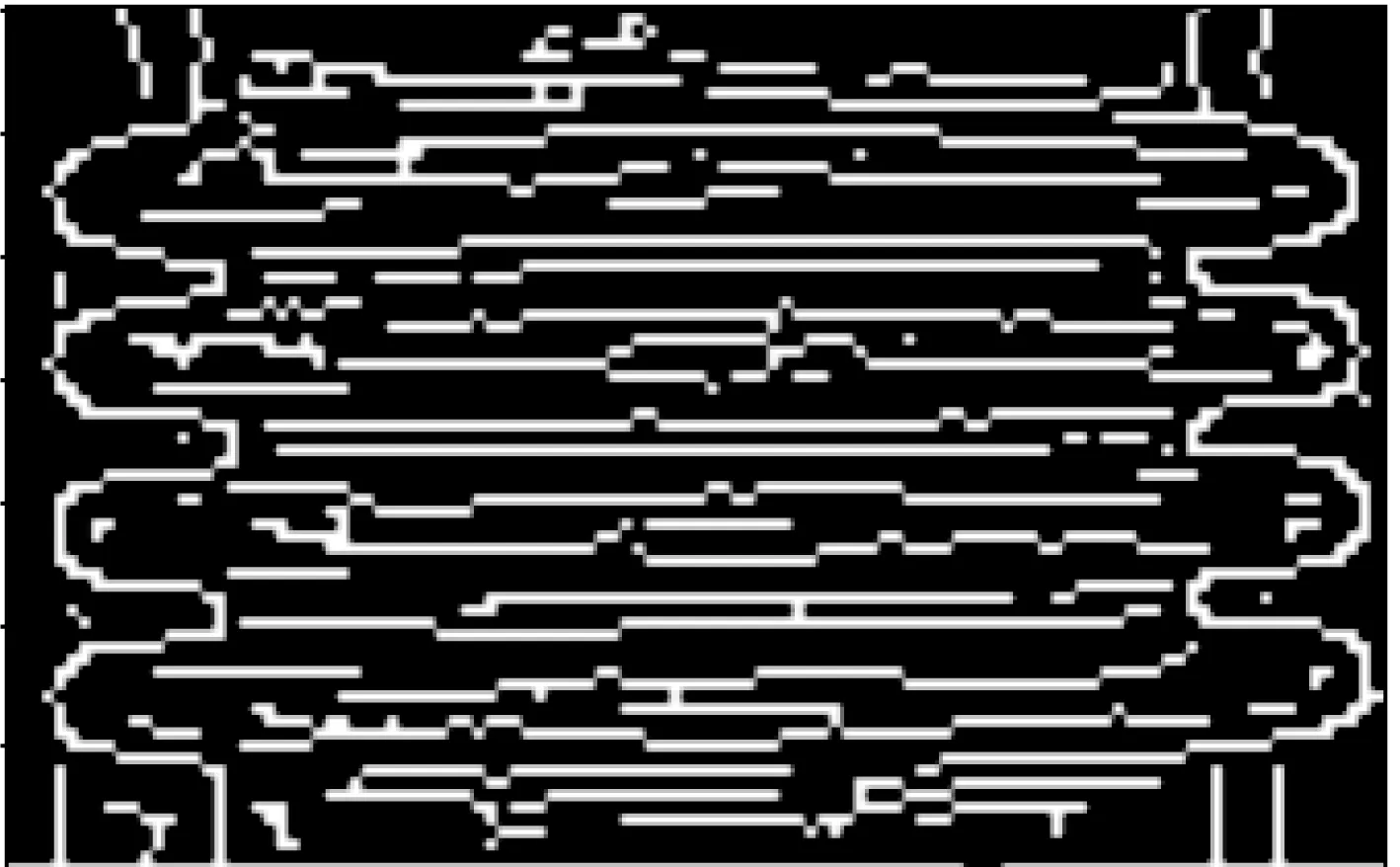
图4 基于Canny算子的波纹补偿器边缘检测效果Fig.4 Edge detection effect of corrugated compensator based on Canny operator
分析图4可知,该图像内部细节保留过多,这会增大后续获取理想二值化图像的难度;此外,原始图像中某些阴影部分也被错认为边缘;所得图像轮廓边缘存在断裂,使得后续边缘特征点难以检测。本文通过多次改变Canny算子的高、低阈值来验证其边缘检测效果,但最终难以获得理想的图像。
2.2.2 基于Sobel算子的边缘检测
在实际应用中,Sobel算子是首选的边缘检测算子,通常情况下其检测效率比Canny算子高很多,且其抗噪能力强,适用于检测效率要求较高且对内部细节不太注重的场合。
Sobel算子是利用一阶偏导的有限差分在横向与纵向上分别与图像作平面卷积,从而得到横向与纵向的亮度差分近似值。Sobel算子并不是简单地先求平均像素再差分,而是加强了中心像素上、下、左、右四个方向上像素的权重[8-10]。
设A为图像的灰度值,利用Sobel算子求解图像中某一像素点的横向、纵向梯度幅值:
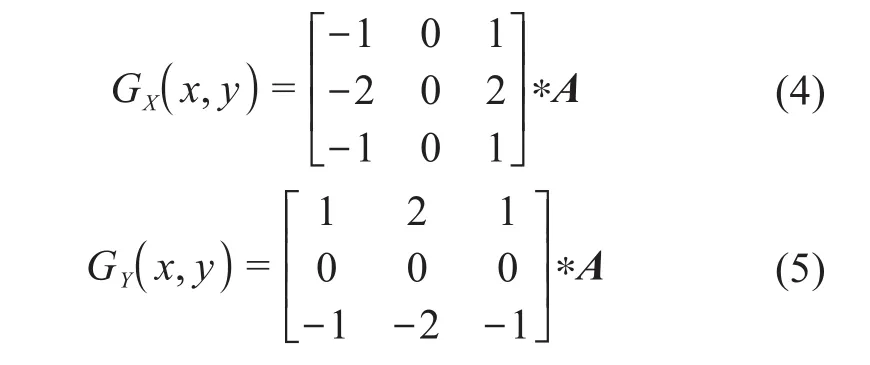
式中:GX(x,y)为横向梯度幅值;GY(x,y)为纵向梯度幅值。
对于图像上的任一像素点,均可获得其横向、纵向梯度幅值,通过式(6)和式(7)分别计算该像素点的梯度幅值G(x,y)和梯度方向θ1(x,y):
鉴于Canny算子因需要人为设定阈值而对图像信息造成较多不确定性,且保留的无用细节较多,甚至出现了虚假边缘以及边缘轮廓断裂等问题,本文选择检测效率高、实用性强的Sobel算子对经高斯滤波平滑处理后的波纹补偿器图像进行边缘检测,结果如图5所示。

图5 基于Sobel算子的波纹补偿器边缘检测效果Fig.5 Edge detection effect of corrugated compensator based on Sobel operator
由图5可以看出,利用Sobel算子对波纹补偿器图像进行边缘检测能够准确地获得波纹补偿器的边缘部分,且未出现伪边缘,比基于Canny算子所获得的效果要好很多。
2.3 图像灰度化处理
灰度化处理是指将含彩色信息的图像转变为灰度图像(只含亮度信息)的过程。通过灰度化处理可将图像从三通道变为单通道,减少了不必要的信息,能够加快后续处理速度以及减少内存。调用MATLAB软件中的相关函数对经边缘检测后的波纹补偿器图像(图5)进行灰度化处理[11],结果如图6所示。
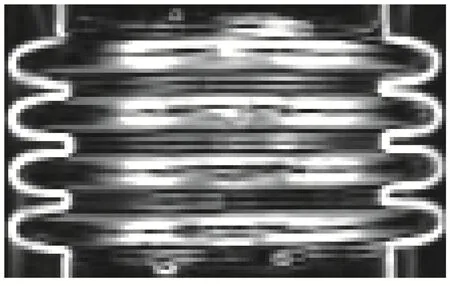
图6 波纹补偿器的灰度化图像Fig.6 Grayscale image of corrugated compensator
2.4 图像阈值分割
图像阈值分割是指将灰度化处理后的图像分成若干个特定的、具有独特性质的区域,并将目标从背景中分割开来,形成一个目标灰度值为1、背景灰度值为0的二值化图像[12]。图像阈值分割方法主要有灰度直方图阈值双峰法、迭代阈值法和自适应Otsu算法。
2.4.1 灰度直方图阈值双峰法
针对灰度图较为简单的情况,可使用灰度直方图阈值双峰法进行图像阈值分割。在灰度直方图中,背景和目标会各自形成一个波峰,由于每2个波峰之间都会形成1个低谷,可通过选择双峰间低谷处所对应的灰度值作为阈值来对图像进行分割[13-14]。调用MATLAB软件中的相关函数,采用灰度直方图阈值双峰法对波纹补偿器的灰度化图像进行分割,所得灰度直方图如图7所示。
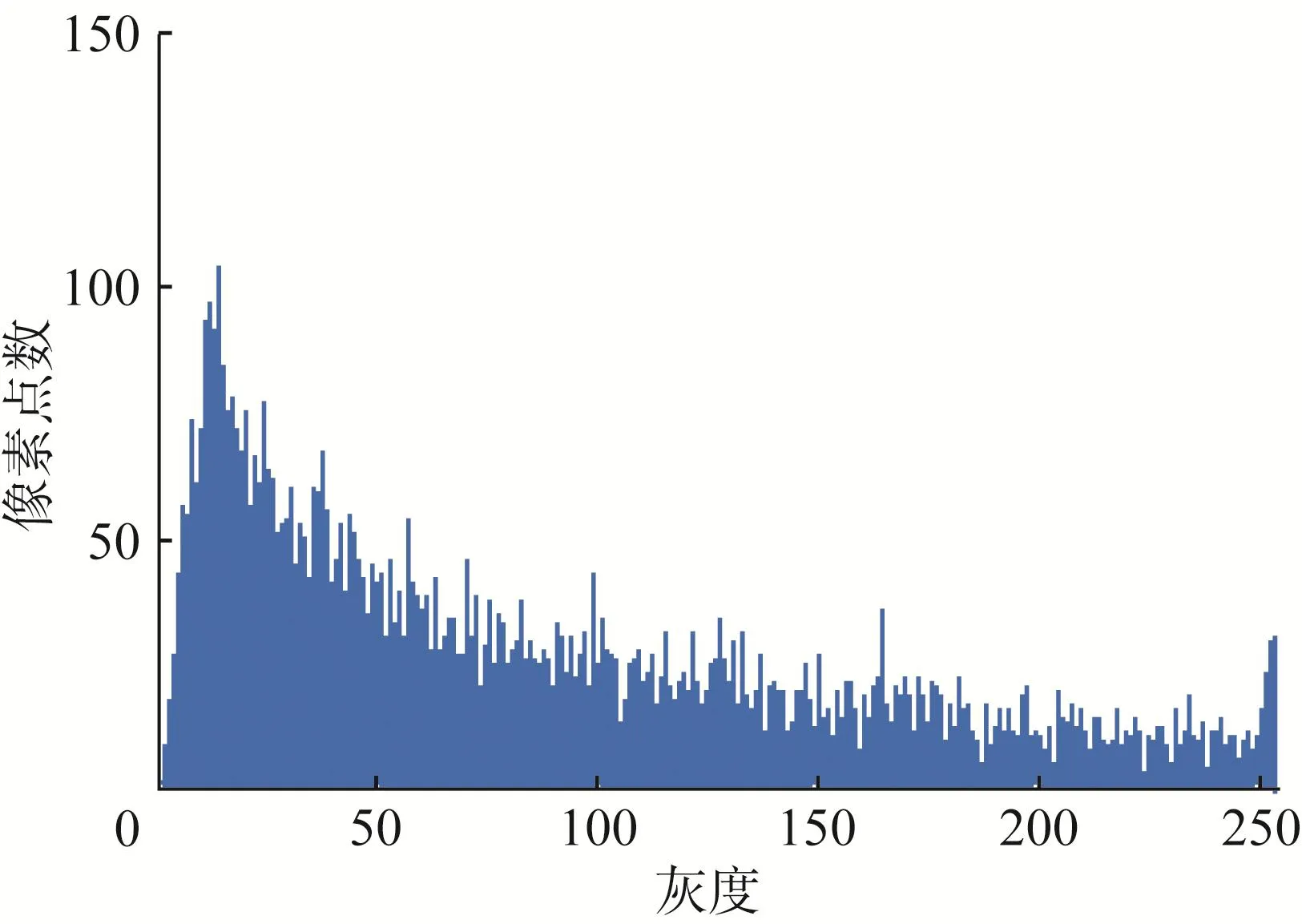
图7 波纹补偿器的灰度直方图Fig.7 Gray histogram of corrugated compensator
从图7中可以看出,由于波纹补偿器灰度化图像中灰度的分布较为杂乱,导致背景和目标对应的波峰之间很难形成比较明显的波谷,从而无法得到合适的阈值,而且通过人工选择阈值来对图像进行分割的方法的局限性太大。
2.4.2 迭代阈值法
迭代阈值法是先通过选取1个估计阈值将图像分为2个子图像,并利用2个子图像的特性重新计算阈值,而后再将每个子图像重新分割成2个子图像,重复迭代,直至阈值不再发生变化,从而确定最终的阈值[15]。
由于迭代阈值法均需人为输入初始阈值,不具有自适应性。对于不同的图像而言,其分割阈值并不相同,而阈值的选取会直接影响分割后二值化图像的质量。因此,应选择具有自适应性的图像阈值分割算法,以避免因人为设定阈值不准确而对二值化图像质量造成不良影响。
2.4.3 Otsu算法
Otsu算法是一种使类间方差最大的自动阈值分割算法,具有自适应性,且无需人为输入参数[16]。假设图像中的像素数为N,灰度范围为[0,L-1],对应灰度级i的像素数为Ni,则灰度为i的概率Pi为:

利用阈值T将图像中的像素按灰度分为2类:C0和C1。其中C0由灰度属于[0,T]的像素组成,C1由灰度属于[T+1,L-1]的像素组成,则图像的平均灰度为:

在[0,L-1]内对阈值T依次取值,当σ2B取得最大值时,所得阈值T即为Otsu算法的最佳阈值。经Otsu算法阈值分割后得到的波纹补偿器二值化图像如图8所示。
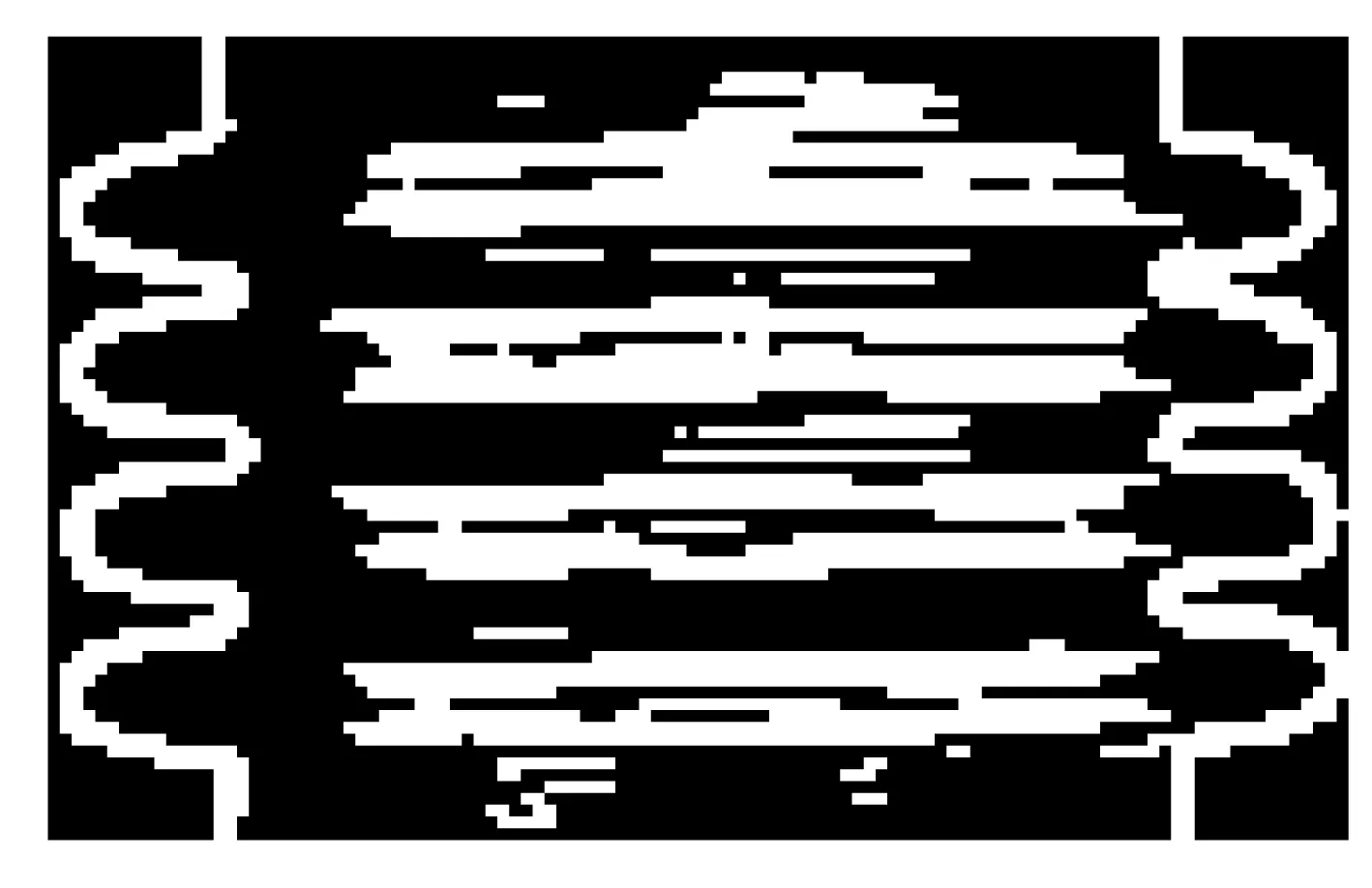
图8 经Otsu算法阈值分割后获得的波纹补偿器二值化图像Fig.8 Binary image of corrugated compensator after threshold segmentation by Otsu algorithm
由图8可以看出,利用Otsu算法进行阈值分割后所得到的波纹补偿器二值化图像的轮廓边缘信息清晰、完整,去除中间多余孔洞部分后即可进行边缘点计算。
2.5 图像取反和孔洞填充
对经阈值分割后的二值化图像进行取反操作,便于进行孔洞填充处理[17-19],从而去除图像中不必要的部分,仅保留边缘信息。对图8进行取反操作,即:将图像中目标部分的灰度值变为0,背景部分的灰度值变为1,结果如9所示。
图9 取反操作后的波纹补偿器二值化图像Fig.9 Binary image of corrugated compensator after inversion operation
然后,对取反操作后的波纹补偿器二值化图像进行孔洞填充操作,即:将图像中的无用线条以及孔洞去除,结果如图10所示。

图10 孔洞填充操作后的波纹补偿器二值化图像Fig.10 Binary image of corrugated compensator after hole filling operation
最后,对孔洞填充操作后的波纹补偿器二值化图像进行二次取反操作,即:将图像中目标部分的灰度值变为1,背景部分的灰度值变为0,得到理想的二值化图像,结果如图11所示。

图11 二次取反操作后的波纹补偿器二值化图像Fig.11 Binary image of corrugated compensator after double inversion operation
由图11可知,基于该方法获得的波纹补偿器边缘信息较为理想,该图像仅保留了灰度值为1的目标以及灰度值为0的背景,没有任何其他的干扰成分,便于后续的图像校正以及尺寸检测。
3 波纹补偿器图像校正及轴向尺寸检测
3.1 图像校正
由于波纹补偿器并不一定安装在竖直管道中,其有可能安装在倾斜管道中,则采集到的图像可能会出现倾斜(垂直或水平倾斜)的情况,从而导致无法准确计算边缘点。因此,须对图像中波纹补偿器的位置进行校正处理。
本文将图像校正处理放在边缘检测、阈值分割、取反操作和孔洞填充处理之后,即对理想的波纹补偿器二值化图像进行校正处理。鉴于在相机标定过程中,相机镜头所在的径向平面与波纹补偿器的中轴线平行,因此无论波纹补偿器如何倾斜,只须对水平倾斜的波纹补偿器二值化图像进行分析。水平倾斜的波纹补偿器二值化图像如图12所示。
图12 水平倾斜的波纹补偿器二值化图像Fig.12 Horizontally inclined binary image of corrugated compensator
本文利用Radon变换来检测图像倾斜角度θ,以实现波纹补偿器图像的校正,即:沿图像中的某条沿特定方向的直线来求解该图像(看作二维函数)的积分,并将得到的积分值投影到Radon变换平面上,积分值在Radon变换平面上的位置由所选直线与原平面原点的距离以及倾斜角度θ所决定[20]。Radon变换平面与原平面的关系为:

式中:z(x,y)为原平面上像素点(x,y)的灰度值;g(s,θ)为图像f(x,y)在特定直线倾斜角度θ上的一维投影平面。
利用MATLAB软件对水平倾斜的波纹补偿器二值化图像进行校正,结果如图13所示。

图13 校正后的波纹补偿器二值化图像Fig.13 Binary image of corrugated compensator after correction
3.2 轴向尺寸检测
基于波纹补偿器形状的特殊性,对校正后的波纹补偿器二值化图像中灰度值为1的部分进行遍历操作,以获得边缘点,具体操作如下:1)取图像最左侧灰度值为1的点;2)取图像最右侧灰度值为1的点;3)取图像最上侧灰度值为1的点;4)取图像最下侧灰度值为1的点。由此获得的波纹补偿器的边缘点如图14所示。

图14 波纹补偿器边缘点获取结果Fig.14 Acquisition result of edge points of corrugated compensator
从图14中可以看出,由于基于Sobel算子获得的波纹补偿器二值化图像的边缘线较粗,在视觉上看是1个点,但是放大图像后其实质上为由多个点拟合成的1条直线。因此,须分别对所获得的12个边缘点进行求中值运算,得出12个边缘特征点。利用MATLAB软件构建以图像左上角为原点的坐标系,并计算各边缘特征点的坐标。图15所示为中值运算处理后波纹补偿器边缘特征点的标注结果。

图15 波纹补偿器边缘特征点标注结果Fig.15 Annotation result of edge feature points of corrugated compensator
得到各边缘特征点的坐标后,先计算图15中最上侧边缘特征点a与m、最下侧边缘特征点f与g的横坐标差值的绝对值,分别设为lam和lfg;再计算最左侧边缘特征点b与c、c与d、d与e、b与e以及最右侧边缘特征点h与j、j与k、k与l、h与l的纵坐标差值的绝对值,分别设为lbc、lcd、lde、lbe、lhj、ljk、lkl和lhl。
波纹补偿器是利用弹性元件的有效伸缩来补偿管线、导管或容器因热胀冷缩等而产生的位移。其中,am段和fg段位于波纹补偿器与管道的连接处,该位置在波纹补偿器工作过程中不会发生变化。由此可知,这2段的尺寸不会发生变化。设波纹补偿器接管处的实际尺寸为L*am、L*fg(根据波纹补偿器接管外径和相机工作距离计算得来),且L*am=L*fg。根据lam与实际尺寸L*am的关系得到相应的比例尺,并计算lbc、lcd、lde、lbe、lhj、ljk、lkl和lhl的实际尺寸,分别设为Lbc、Lcd、Lde、Lbe、Lhj、Ljk、Lkl、Lhl(基于图像识别获取的实际尺寸)。但是,由于L*am并非为波纹补偿器接管的实际外径,其由波纹补偿器接管外径与相机标定距离所决定。波纹补偿器边缘特征点a、m所在位置与相机的关系如图16所示。
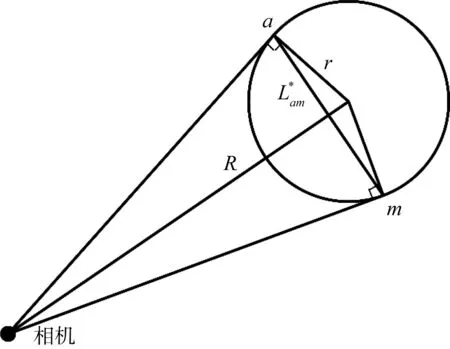
图16 波纹补偿器边缘特征点a、m所在位置与相机的关系Fig.16 Relationship between position of edge feature point a,m of corrugated compensator and camera
由图16可知,L*am的计算式如下:

式中:R为相机与波纹补偿器中轴线之间的距离;r为波纹补偿器接管的半径。
比例尺p的计算式为:

基于所得比例尺,计算波纹补偿器整体及其相邻波纹之间的实际轴向尺寸,计算通式如下:

4 实验验证及结果分析
为了验证所提出的基于图像识别的波纹补偿器轴向尺寸检测方法的准确性,在相机标定距离R=500 mm时,对接管半径r=160 mm的波纹补偿器在轴向尺寸允许范围内进行不同程度的轴向打压实验,实验现场如图17所示。用精确度为0.02 mm的游标卡尺分别测量在轻度、中度和深度打压下波纹补偿器的整体轴向尺寸以及其相邻波纹之间的轴向尺寸;然后与用所提出的检测方法计算得到的不同打压程度下的轴向尺寸进行对比,结果如表2至表5所示(lam=82.000像素,L*am=157.940 mm)。其中:表2为未打压时,表3为轻度打压时,表4为中度打压时,表5为深度打压时。

表2 未打压时波纹补偿器的轴向尺寸对比Table 2 Comparison of axial dimension of corrugated compensator without compression

表3 轻度打压时波纹补偿器的轴向尺寸对比Table 3 Comparison of axial dimension of corrugated compensator with mild compression

表4 中度打压时波纹补偿器的轴向尺寸对比Table 4 Comparison of axial dimension of corrugated compensator with moderate compression

图17 波纹补偿器打压实验现场Fig.17 Compression experiment site of corrugated compensator
通过表2至表5可以直观地看出,所提出的检测方法能够精确地检测出不同打压程度下波纹补偿器的整体轴向尺寸以及其各相邻波纹之间的轴向尺寸;虽然基于所提出检测方法测得的波纹补偿器轴向尺寸与用游标卡尺测量的尺寸间存在误差,但均在允许范围之内。

表5 深度打压时波纹补偿器的轴向尺寸对比Table 5 Comparison of axial dimension of corrugated compensator with deep compression
此外,从上述表中还可以看出,虽然在不同打压程度下波纹补偿器相邻波纹之间的轴向尺寸有所变化,但是在相同打压程度下是相等的,说明每个波纹都在均匀地承受位移载荷,未出现失稳现象。结果表明,所提出的检测方法可以弥补位移传感器在检测波纹补偿器轴向尺寸时的不足。
综上,基于图像识别的波纹补偿器轴向尺寸检测方法能够准确地对不同打压程度下的波纹补偿器的图像信息进行处理,然后精确地计算出波纹补偿器的整体轴向尺寸以及其相邻波纹之间的轴向尺寸。
5 结论
本文以波纹补偿器为研究对象,应用图像识别技术实现了对波纹补偿器整体轴向尺寸以及其相邻波纹之间轴向尺寸的测量,得到的结论如下。
1)使用高斯滤波、边缘检测、阈值分割、取反和孔洞填充等操作处理图像后,能够得到目标灰度值为1、背景灰度值为0的理想二值化图像,满足下一步尺寸检测的要求。
2)通过实验验证可得,先利用波纹补偿器形状的特殊性,对处理后的图像进行边缘特征点检测,然后根据比例尺计算实际尺寸的方法可满足波纹补偿器轴向尺寸检测的精度要求。
综上所述,基于图像识别的波纹补偿器轴向尺寸检测方法不仅能够实现位移传感器的功能(检测波纹补偿器整体轴向尺寸),而且能很好地弥补位移传感器在波纹补偿器轴向尺寸检测应用上的不足(无法检测波纹补偿器相邻波纹之间的轴向尺寸)。对于因无法检测相邻波纹之间轴向位移不均匀程度过大而造成工业管道中波纹补偿器损坏的现状,所提出的检测方法具有重大意义。
