多故障源混合信息的特征分离与精确辨识
2022-03-09张建宇王国峰
张建宇,王国峰,杨 洋
(1.北京工业大学 材料与制造学部 北京市先进制造技术重点实验室,北京 100124;2.北京市精密测控技术与仪器工程技术研究中心,北京 100124;3.北京金风科创风电设备有限公司,北京 100176)
在设备故障诊断领域,多故障并发是一种普遍现象。但是,由于故障源会通过某种方式耦合在一起,能否从中分离出一个或者多个故障源信息,对于机械故障的准确诊断至关重要。因此,需要研究一种有效的多故障源混合信息的分离方法。当多个信号源按照某种方式混合并且无先验知识时,对观测信号的特征辨识即可归为盲分离问题。目前,盲分离问题主要分为线性瞬时混合盲分离和线性卷积混合盲分离。
对机械系统的振动信号而言,卷积混合模型更符合实际情况,因此基于反卷积的盲分离方法逐渐成为国内外学者的研究热点。除了研究反卷积在机械故障诊断中的适应性问题,该技术在应用层面也取得了长足的发展。Mohammed 等[1]在旋转机械故障分离中,将最小互信息准则和最小失真原则用于盲反卷积算法,很好地改善了盲分离的不确定性问题。Zhang等[2]以盲反卷积技术为基础,提出了一种多功能协作系统,成功应用到直升机主变速箱的故障预测中。Randall等[3–5]将AR线性滤波和谱峭度与最小熵反卷积技术结合,很好地消除了传输路径的影响,突出故障脉冲冲击,并成功应用在齿轮和轴承的故障诊断中。王宏超等[6]将最小熵反卷积(Minimum Entropy Deconvolution,MED)与稀疏分解用于轴承微弱故障诊断中,对强噪声背景信号进行MED降噪预处理,然后应用稀疏分解完成故障特征提取。周晓峰等[7]将负熵最大化用于半盲分离,小波分解与盲分离结合成功实现了机械振源信号的分离[8]。袁幸等[9]应用拉普拉斯小波与盲反卷积结合算法,突出轴承故障的冲击成分。
本文以机械传动部件的表面损伤为研究对象,针对复杂结构内部多个未知振源引起的卷积混合效应,建立多通道的反卷积分离与辨识方法,实现多个故障源信息的分离、提取。
1 多通道卷积混合分离原理
卷积混合模型将传输路径等效为一个滤波器,观测信号可以看作经过传输路径效应后的多故障源信号叠加的结果。卷积混合模型的表达式如下:

式中:S代表故障源信号(本文以两个通道为例),A为混合矩阵,X为观测信号。通常情况下,需对分离系统做一定假设:假定A11(z)和A22(z)为1,且滤波器为FIR因果滤波器,系数满足|aij(k)|<1。
反卷积的目的就是找到最优的分离矩阵W,与观测信号进行卷积得到未知的源信号。

在此,引入反馈神经网络分离结构,其估计结果与当前输出及过去输出均有联系,结构原理如图1所示。
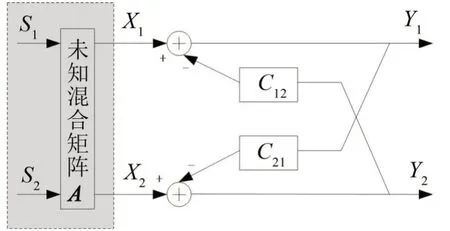
图1 反馈神经网络结构分离原理图
根据原理图,估计信号的时域表达式为

式中:i≠j,∀i,j∈{1,2},cij(k)为反馈矩阵Cij系数,且Cii=0。
2 多通道信源分离方法研究
多通道信源分离方法通过迭代寻优方法对滤波器系数进行更新,选取最优解。但是,由于缺乏先验知识,信源数量未知,因此多通道分离算法需要首先预判信源数目,从而确定反卷积的通道数量。进而根据信号独立性准则完成滤波器系数的更新,最后实现源信号分离。
2.1 信号源数估计方法
本文采用基于离散小波变换和奇异值分解的源数目估计方法,其优势在于只利用一组观测信号即可完成估计,能很好地解决欠定盲分离条件下的源数估计问题。
其流程如下:
(1)对观测信号x()t去均值后进行多尺度离散小波分解,尺度为r;
(2)分别对每层小波系数的高频成分和低频成分进行单支重构,并组合成一个2r维的复合矩阵xdwt;
(3)求复合矩阵xdwt的协方差矩阵,去均值信号的协方差矩阵等于相关矩阵;
(4)对相关矩阵进行奇异值分解(Singular Value Decomposition,SVD),去除特征值为0 的元素,得到新的特征向量;
(5)最后通过主奇异值数目确定源信号个数。
源数估计的关键在于准确判定主奇异值的数量,本文根据相邻特征值的比值(特征值下降速比)进行确定。比值最大时对应项数即为最小的主特征值,该项数之前的均为主特征值。这样,得到的主特征值数目即为源数。具体如下:
设特征值向量为{}λ1,λ2,…λM,则最小主特征值确定方法为:

Q对应项的分子为最小主特征值。
2.2 分离迭代准则与评价指标
反卷积分离方法的核心在于迭代准则的确定,本文选取基于高阶统计量的独立性度量准则,完成滤波器系数的估计。滤波器系数Cij的迭代公式为:

式中:f(·)= (·)3;μ为迭代步长。
由式(3)可得:

从而可得源信号估计如下:

2.3 分离算法的仿真验证
多源卷积混合特征分离的流程如图2所示,即:根据源数估计结果确定系统的输入通道数量;利用反卷积滤波器实现信源分离。
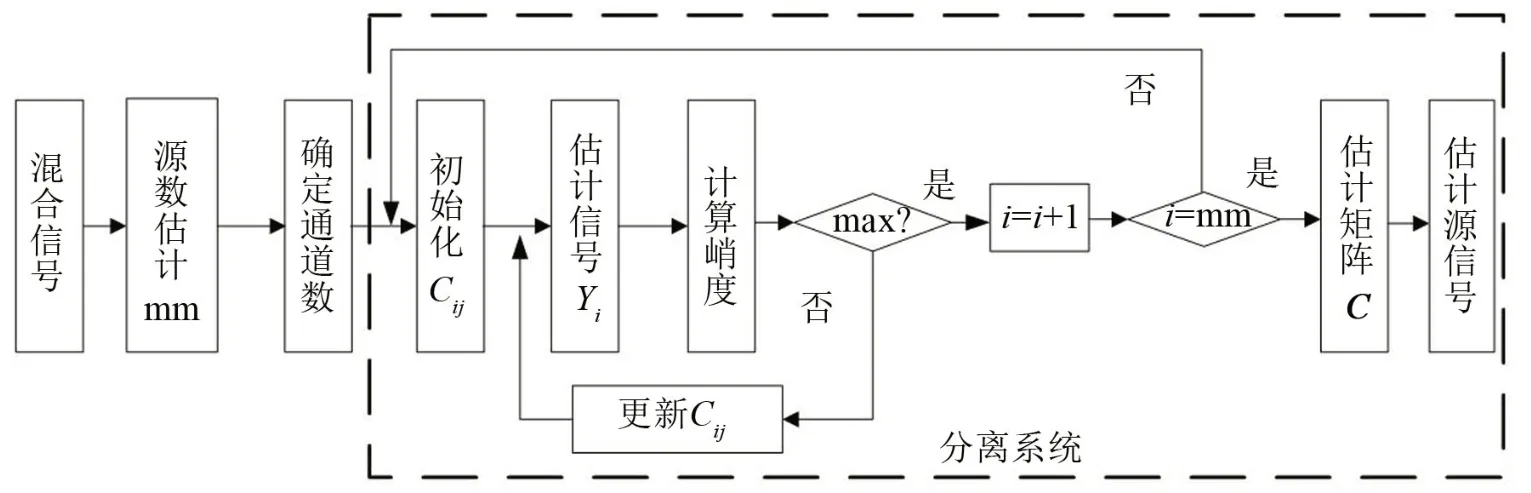
图2 多源混合故障特征分离流程图
本文首先构造卷积混合的仿真信号,验证上述分离方案。由于信源已知,此处采用相关性准则,即源信号与分离信号之间的相关系数,评价分离效果的优劣,即相关系数越接近于1,分离效果越好。
分离信号y与源信号s之间的相关系数为:
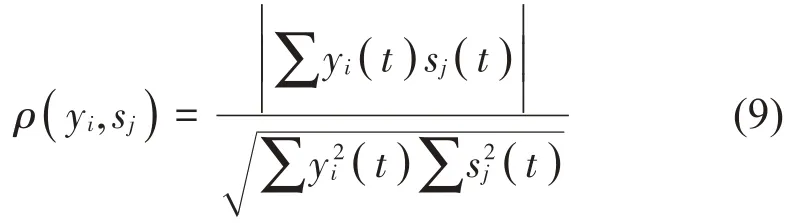
式中:yi为分离系统第i个输出向量;sj为源信号的第j个分量。
构造包含噪声的轴承故障仿真信号与调制信号s(t)=100× (1+0.5×sin(40πt))cos(250πt)进行卷积混合,两组源信号如图3所示。混合矩阵由式(10)给出,图4为混合后的波形。在迭代求解过程中,着重探讨初始滤波器长度对分离结果的影响。
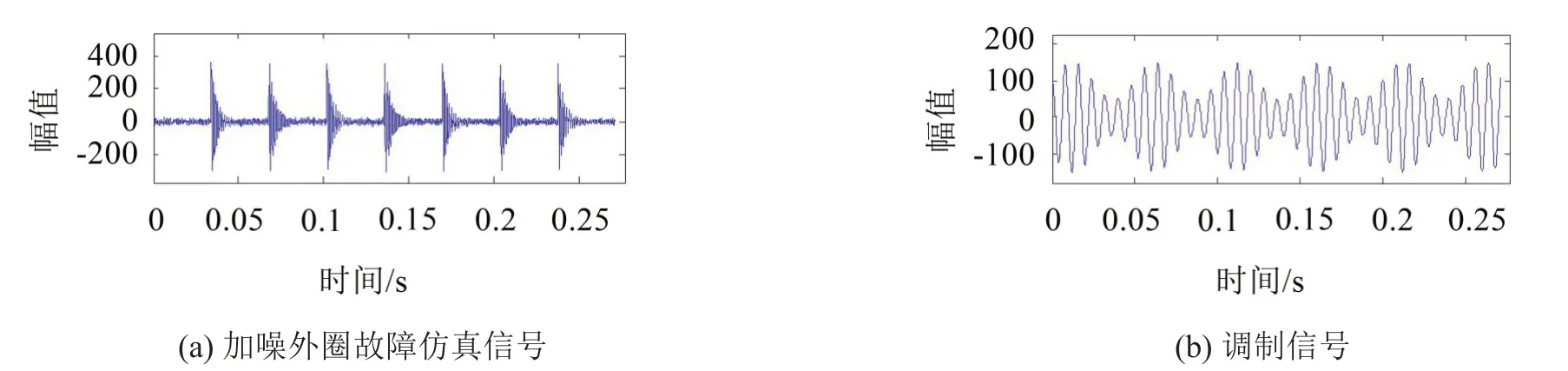
图3 仿真的源信号时域波形

图4 卷积混合后的信号时域波形
混合矩阵为:

选取一组观测信号进行源数估计,混合信号去均值后进行五层离散小波变换,小波函数选为db10;各层小波系数经单支重构后,组合得到10 维矩阵xdwt;计算xdwt的协方差矩阵xcov,对xcov进行SVD 分解。保留其非零特征值,其特征值下降速比曲线如图5所示。
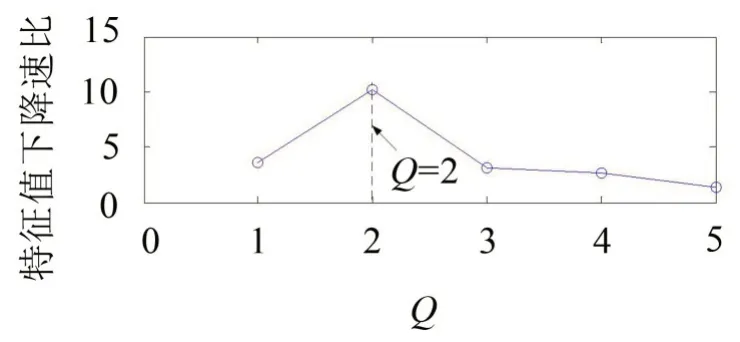
图5 仿真信号的特征向量下降速比
可见,Q=2时下降速比最大,表明主特征值有两个,即信源数量为2,与仿真信号一致。
选取两组信号进行反卷积分离,初始化的滤波器矩阵为随机矩阵,系数的绝对值均小于1。选取不同的滤波器长度L=1~80,计算分离系统输出结果与源信号之间的相关系数,得到的两组相关系数曲线如图6所示。

图6 反卷积结果与源信号的相关系数曲线
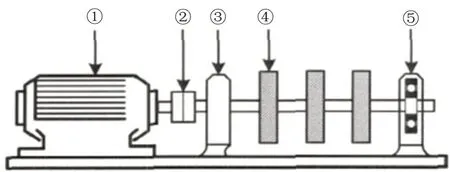
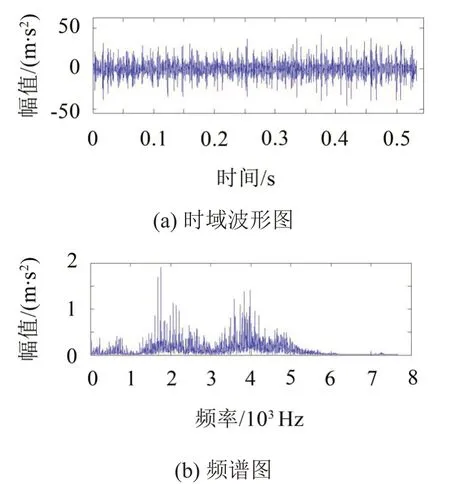
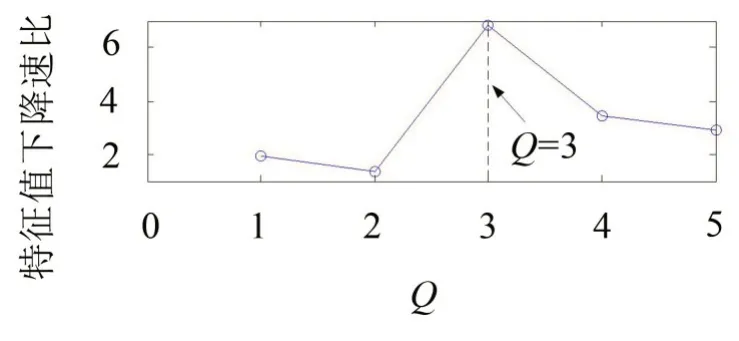
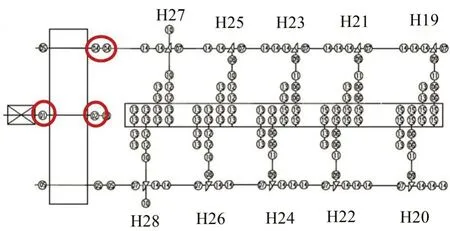
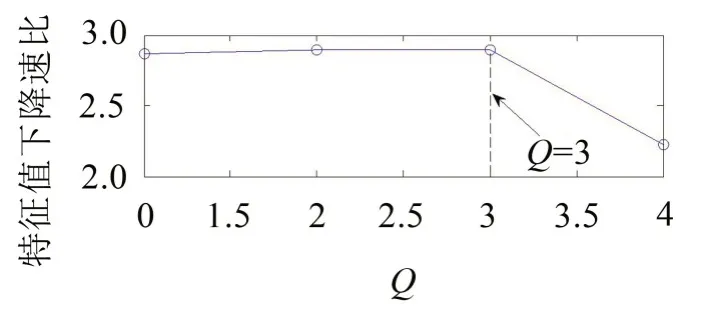
由图可见,滤波器长度对分离结果的影响较大。由反卷积分离前后调制信号相关系数曲线可知,在滤波器长度L<12 时,相关系数较小,即分离出的调制信号与源信号相似性较差;当滤波器长度取值范围在12 基于上述分析,选取滤波器长度L=8 时系统输出的故障信号,以及L=50时系统输出的调制信号作为最终分离结果,其与源信号的相关系数分别为0.819 7和0.960 5,分离后的波形如图7所示。 图7 反卷积系统输出的最终结果 根据仿真信号的分离结果可见,不同的源信号所对应的最佳分离滤波器长度不同,因此,需要在反卷积过程中对滤波器长度进行优化选择。以此为出发点,本文以峭度指标作为优化判据,提出了一种自适应多源信息分离方法。 由于滤波器长度对分离系统的输出结果有显著影响,为了获得最佳的分离效果,建立如下迭代优化算法: (1)对混合信号Xj进行信号源数目估计,得到源数为Q; (2)设定分离矩阵滤波器长度范围L∈[l1,l2],初始循环条件l=l1; (3)利用随机矩阵初始化分离矩阵Cij,i≠j,∀i,j∈[ 1,Q],其中每个滤波器长度为l; (4)将Q个混合信号及分离矩阵Cij输入到反卷积分离系统中,得到Q个输出信号;比较各输出信号的峭度指标K,从中选取一个最优输出; (5)l=l+1,判断l是否达到循环终止条件,l ≤l2时返回步骤(3);l>l2循环结束。针对各个滤波器长度下的输出结果,构造峭度指标矩阵,其维数为Q×(l2-l1+1); (6)每行峭度指标最大值Kbest对应的滤波器长度为该通道最佳长度,并提取相应循环步骤对应的最优输出为最佳分离信号Ybest。 由于实测信号的信源未知,因此,与仿真信号不同,上述算法流程中采用峭度指标评价反卷积系统的分离效果。 本文首先将自适应分离方法用于滚动轴承的复合故障诊断,实验信号采自图8所示实验台,其结构包括:①电机、②联轴器、③无故障轴承、④圆盘转子、⑤故障轴承(可更换)。轴承型号为6307,采用电火花加工内、外圈点蚀故障。信号采样频率为15 360 Hz,采样点数为8 192。根据轴承参数计算外圈和内圈的故障特征频率分别为76.728 Hz、122.738 Hz。信号原始波形及其频谱如图9所示,波形冲击成分复杂,频谱主要集中于2 000 Hz和4 000 Hz左右,共振调制现象明显。 图8 实验台结构简图 图9 轴承内外圈复合故障信号 选取一组观测信号进行源数估计,其特征值下降速比曲线如图10 所示。可见,Q=3 时下降速比最大,占优特征值有3 个,即表明待分离信号中包含3个信号源。本实验方案中只设计了轴承的内圈和外圈点蚀缺陷,另一未知源信号待查。 图10 轴承复合故障信号特征向量下降速比 选取3 组实测信号输入分离系统,设定滤波器长度范围为[5,150]。图11 为第一组信号的反卷分离结果,其中图11(a)为峭度指标随滤波器长度的变化趋势,最大值为6.959,对应的滤波器长度为25(图中红色圆圈)。提取该指标对应的输出信号,结果如图11(b)所示,可见,信号存在明显的周期冲击,冲击间隔0.008 2 s 对应频率为121.9 Hz,即内圈故障特征频率,冲击组间隔0.040 3 s 的频率为24.8 Hz,对应轴的转频,因此可判定该输出信号为内圈故障信号。 图11 分离信号1的峭度指标趋势与输出结果 同理,根据另两路分离信号的峭度指标趋势图,亦可找到最佳的滤波器长度,进而获得相应的最优输出,结果如图12所示。 图12(a)为滤波器长度35对应的分离信号,也存在明显的周期冲击,冲击间隔0.013 s 对应频率为76.92 Hz,即外圈故障特征频率,可判定该输出信号为外圈故障信号;图12(b)为滤波器长度144 对应的分离信号,接近典型的正弦波,频率为24.38 Hz,与轴频一致,该信号即为第三个未知源信号,其特征与不平衡故障相符。经检查,实验台由于频繁拆装,导致质心偏移,形成不平衡故障。 图12 反卷分离系统的其他两组输出结果 2009 年8 月13 日,某钢厂高线精轧机组监测系统报警,检查发现增速箱多个轴承同时损坏。该设备的轴承分布如图13 所示。发生故障的是01、02、04号轴承(图中圆圈标注)。本文选用故障发生前两周,即7 月29 日的监测数据进行分析,采样频率为12 000 Hz,采样点数为2 048,电机即时转速为1 169 r/min。根据零部件参数,计算得到故障轴承特征频率如表1所示。信号原始波形及其解调谱如图14所示,解调谱中可见193.4 Hz及其倍频特征,其中193.4 Hz与01号轴承的外圈特征频率197.831 Hz最为接近。除此以外,无法找到与02和04号轴承相关的故障信息。 图13 精轧机组轴承分布图 图14 工程信号时域波形图和解调谱 表1 轴承故障特征频率表 选取某一测点的观测信号完成源数估计,其下降速比曲线如图15所示。 图15 工程信号特征向量下降速比 可见Q=3时下降速比最大,占优特征值有3个,表明该工程信号包含3个源信号。选择三组信号输入分离系统,设定滤波器长度范围为[5,150],分离系统的3组最优输出信号如图16所示。 图16(a)中,是滤波器长度为15 时分离出的信号;图16(b)是滤波器长度为113时分离出的信号;图16(c)是滤波器长度为109 时分离出的信号。这3 组输出信号中均存在明显冲击。 图16 分离系统输出结果图 图17(a)至图17(c)分别为3 组输出信号的解调谱,从图17(a)中可以看出,其中只存在193.4 Hz 及其倍频成分;图17(b)只存在386.7 Hz的频率成分及其倍频;图17(c)则存在单一频率成分175.8 Hz。 图17 分离系统输出信号的解调谱 与设备的故障特征频率表1对比,可知,输出信号一中的193.4 Hz 对应于01 号轴承外圈故障特征频率197.831 Hz(误差为4.431 Hz);输出信号二中的386.7 Hz 对应于04 号轴承外圈故障特征频率388.821 Hz(误差为2.021 Hz);输出信号三中的175.8 Hz 对应于02 号轴承外圈故障特征频率174.852 Hz(误差为0.948 Hz),上述误差均在频域分辨率范围以内,分离结果与检修结论完全一致。 由此可见,本文建立的自适应反卷积分离方法能够将多故障源混杂的振动信息成功分离。 (1)针对多故障源混合的特征分离问题,依托多通道反卷积理论,能够实现振源信息解耦,从而显著提高故障诊断的准确性。 (2)由于实测信号中的振源信息未知,因此分离系统首先利用小波变换与奇异值分解完成信号的源数估计,从而确定系统的输入通道数量。 (3)仿真分析表明,滤波器长度对分离效果有显著影响。为了优化该系统参数,建立了一种自适应卷积混合分离方法,以峭度指标为判据,通过循环迭代实现了分离信号的最优化选择。 (4)无论是滚动轴承的复合故障数据,还是多故障并存的实测工程信号,采用本方法均能实现故障信息的特征分离与精确辨识。
3 自适应多源信息分离方法
4 轴承复合故障的特征分离


5 复杂工程信号的信源辨识




6 结语