多关节套索驱动机械臂的自适应滑模鲁棒控制*
2022-03-04张世轩王琬琪徐志刚杜木雄
张世轩 ,王琬琪,徐志刚,杜木雄
(1.中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳 110016;2.中国科学院网络化控制系统重点实验室,沈阳 110016;3.中国科学院机器人与智能制造创新研究院,沈阳 110169;4.中国科学院大学,北京 100049;5.华北计算机系统工程研究所,北京 100083)
0 引言
随着智能机器人的发展,作为机器人的重要组成部分,机械臂的设计与控制是研究的关键。考虑到成本与控制因素,轻型机械臂设计多采用两种方案,一种为传统电机与减速器驱动的方案,如ASIMO[1]和Sophia[2],负载较小,便于控制。另一种为永磁同步电机与谐波减速器驱动的方案,如ABB-YUMI[3]、DLR-Justin[4]、Rethink-Baxter[5]、Saywer[6]以及Kinova-Jaco[7]等,负载较大,但成本较高。柔性套索已在机械臂上有相关应用,如WAM[8]和LIMS2[9]等,但这些机构主要通过滑轮来实现远距离的传动,过于复杂的结构使得系统的制造和控制成本变得较高。为降低成本,本文提出一种通过套索传动使电机后置的方案,参照人手臂的肩、肘、腕关节设计了一种6自由度机械臂。
对于机械臂系统,考虑模型不确定性及外界扰动下的系统鲁棒性是提高控制系统容错性的重要前提。滑模控制(SMC)是一种能够有效处理系统不确定性的鲁棒控制技。SUN等[10]率先基于滑模控制,提出了具有PID滑模面的PID滑模控制器,并应用在双链直接驱动机器人手臂上,得到了让人满意的表现;JAFAROV等[11]提出了一种参数自适应的滑模控制方法,对2-DOF直接驱动机器人手臂的动态模型进行了模拟,得到了较好的鲁棒性能;EFE[12]针对机械臂关节柔性产生的干扰转矩,提出一种无模型鲁棒自适应控制器,利用增益自适应定律设计了滑模控制器,并在柔性关节机器人上进行了实验验证。以上研究均在滑模控制的基础上,对机械臂的转矩参数不确定性做研究,考虑到了一些鲁棒性的研究,然而并未真正地从数值算法上去考虑系统的抗干扰能力。
本文在完成6自由度套锁机械臂的结构设计基础上,首先通过对机械臂的动力学分析,得到了机械臂的运动学模型;进而考虑到其模型中的参数不确定性,基于现有的一种最优控制理论的优化函数法[13],提出了一种改进自适应滑模控制策略;最后通过仿真验证及样机实验的方式,验证了所改进的自适应滑模控制可有效地抑制参数摄动带来的干扰,证明了本文所提算法对多关节套锁驱动机械臂的控制具有较好的鲁棒性。
1 机械臂动力学建模
本文所设计的6自由度机械臂由6个转动关节组成,其结构如图1所示。其中关节1、2与3实现类似人手臂肩关节的运动;关节5、6实现类似腕关节的运动;关节4可实现类似肘关节的运动。关节1采用电机经减速器直接驱动,位于机械臂底部,其余关节通过套索传动实现了驱动电机的后置。对D-H法进行改进,建立机械臂的连杆坐标系如图1所示。其D-H参数表如表1所示。

图1 机械臂整体结构图

表1 机械臂参数表
由连杆变换公式和变换传递公式可以分别得到机械臂肩关节及末端执行器的运动学方程。其中连杆变换公式如式(1)所示,变换传递公式如式(2)所示,由此可以得到机械臂末端执行器位姿的表达式。
(1)
(2)
工作空间是评价机械臂工作能力的重要性能指标,是对末端工作区域的描述,可以用机械臂末端执行器到达位置点的集合来描述工作空间。机械臂末端位置是关于θi的方程,机械臂工作空间的表达方程为:
W={p|θimin≤θi≤θimax(i=1,2,…,6)}
(3)
式中,θimax和θimin分别表示关节转角的最小值和最大值。通过仿真可以得到机械臂末端执行器的工作空间,如图2所示。

(a) 三维工作空间

(b) 二维工作空间图2 机械臂工作空间
机械臂的总动能表达式为:
(4)
其中矩阵Ii的表达式如式(5)所示。
(5)

机械臂的总位能表达式为:
(6)
在求得机械臂连杆坐标系的动能和位能表达式之后,即可获得Lagrange函数,其表达式为:

(7)
根据Lagrange动力学定理,即可得到机械臂的动力学方程为:

(8)
将式(8)写成式(9)的形式:
(9)

(10)
2 自适应滑模鲁棒控制策略
2.1 问题描述
考虑如下系统,如式(11)所示。

(11)
式中,d为干扰;s为系统的评价信号。

为了表示系统的抗干扰能力,定义如下性能指标,如式(12)所示。
(12)
式中,J为系统的L2增益,表示系统的鲁棒性能。显然,J值越小,表示系统的鲁棒性能越好。
根据文献[14]中的定理2可知,HJI(hamilton-jacobi inequality)理论描述如下:
对于任意给定正实数γ,如果存在正定且可微的函数L(x)≥0且满足式(13)。
(13)

2.2 控制算法
由问题描述可知,通过设计滑模控制律,设计控制系统的Lyapunov函数L(x)≥0,使其满足式(13),则鲁棒条件J≤γ成立。
考虑柔性多关节机械臂的动力学方程如式(14)所示。

(14)

理想位置指令为qd,跟踪误差为e=q-qd,设计控制律为:
(15)
式中,u为反馈控制律。
将控制律式(15)代入动力学方程式(14),可得式(16)。

(16)


(17)
定义滑模函数s为评价信号,即有式(18)成立。

(18)
式中,c>0。
于是有式(19)成立。

(19)

将式(19)写成HJI条件形式,如式(20)所示。
(20)

那么为了使式(20)满足J≤γ,控制律可设计为式(21)的形式。
(21)
这里为保证控制信号的有效性,设计了自适应映射策略,对u加以限制,自适应律如式(22)所示。
(22)
式中,
自适应滑模控制示意图如图3所示。

图3 自适应滑模控制示意图
2.3 Lyapunov稳定性分析
为证明控制律设计的有效性,定义Lyapunov函数如式(23)所示。
(23)
则有式(24)成立:

(24)
定义式(25)
(25)
则有式(26)成立。
(26)

(27)
根据HJI理论,可得J≤γ,鲁棒条件满足。
3 仿真分析
前文描述的柔性伺服系统为被控对象,仿真参数如表2所示,系统摩擦干扰模型Δ=0.5x2+1.5sign(x2)。位置指令取sint,参数θ∈[0.5 1.5]。关节理想角度信号为:q1d=q2d=q3d=q4d=q5d=q6d=sint。各关节角度及角速度跟踪仿真如图4和图5所示。

表2 仿真模型关节1-6参数
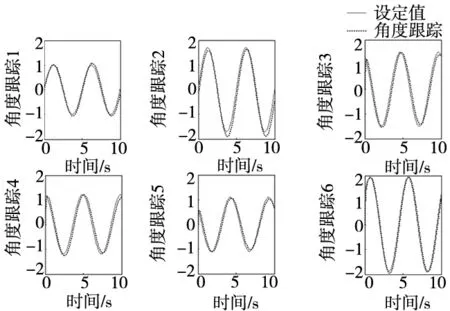
图4 关节1-6的角度跟踪

图5 关节1-6的角速度跟踪
4 样机实验
本文搭建的机器人样机试验平台驱动电机采用自带减速器的舵机ASME-MRB(最大输出扭矩38 Nm),柔索采用直径为1 mm的钢丝绳,套管采用长方形弹簧丝绕成的外径2.2 mm、内径1.2 mm螺旋套管。机械臂的控制系统采用NI-cRIO-9067作为下位机,系统的硬件结构如图6所示。控制程序首先在上位机由Labview软件编写,然后通过Can接口下载到运行实时系统的下位机执行。关节角度反馈信号由编码器测量后输入NI-9205模块,运动控制信号由NI-9264模块输出到电机驱动器。实时反馈与数据监测的频率设置为1 kHz。机械手运动过程如图7所示。
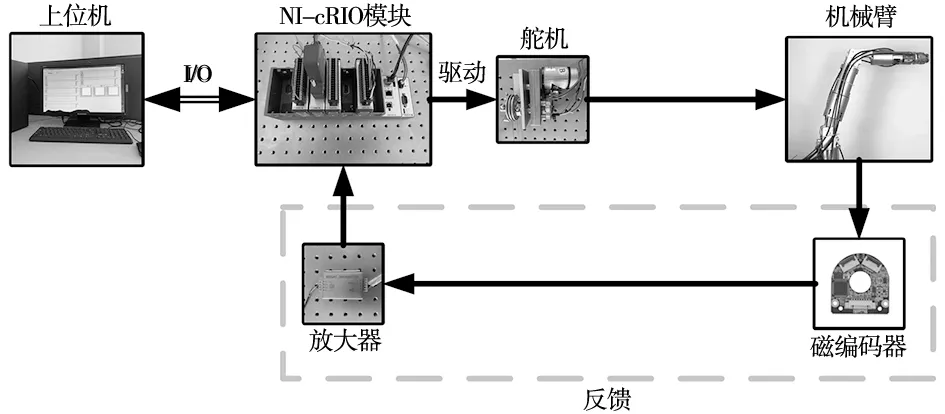
图6 实验样机系统
本文以机械臂的关节2为实验对象,实验分别采用PI控制和自适应滑模控制,实验结果如图8、图9所示。根据图8和图9可知,关节2的实际正弦跟踪实验时表现良好。使用本文所提控制策略时,机器人关节一输出的位移明显好于使用PI控制策略。

图8 关节2位置跟踪实验
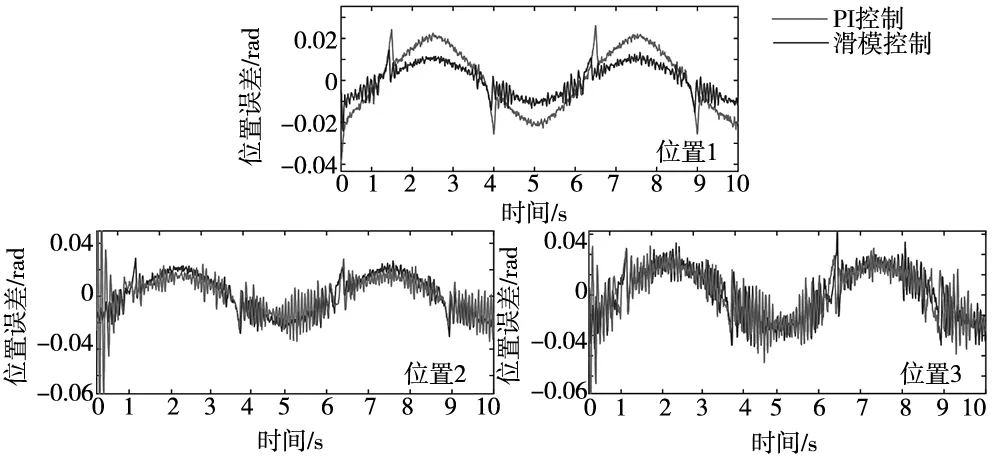
图9 关节2位置跟踪误差
5 结论
本文针对套索驱动机械臂的运动过程中,末端执行器姿态变化会导致关节负载转动惯量收到干扰的问题,设计了一种自适应滑模鲁棒控制算法。主要结论如下:
(1)建立了6自由度套索驱动机械臂的动力学模型。文章基于所设计的柔性套索驱动机械臂,通过D-H法分析了其末端执行器的工作空间,使用拉格朗日法进行运动学分析,建立了其动力学模型。
(2)设计了自适应滑模鲁棒控制策略。基于套索机械臂的动力学模型分析了模型中负载转动惯量的变化特性,基于HJI理论建立了优化性能指标函数,在滑模控制的基础上设计了控制参数的自适应率,并通过Lyapunov函数法证明了所设计控制策略的稳定性。
(3)在6自由度套锁机械臂上验证了本文所提算法的有效性。基于文章所设计的控制策略,通过仿真的方式首先验证了有效性;然后搭建样机进行实验,对比了常用的PI控制器对干扰抑制的作用,效果显著。可以展望,文章提出的自适应滑模鲁棒控制策略可在6自由度套锁机械臂后续更为复杂的运动中,起到良好的控制作用。
