基于预测和量测的多建议分布粒子滤波*
2022-03-01龚佑斌刘金澎
龚佑斌,刘金澎
(中国电子科技集团公司第29研究所,四川 成都 610036)
0 引言
粒子滤波(Partial Filter,PF)算法通过采样点来近似表征状态的统计分布,可以应用于各种非线性和非高斯系统,具有广泛的适用性,因此在近几年获得了越来越多的关注[1-3]。然而标准的PF(Standard PF,SPF)算法会面临不可避免的粒子退化[4]问题,这会造成较为严重的计算资源浪费。为了解决该问题,一种常见的方法是增加重采样步骤[5],但这会导致粒子多样性的丢失,从而造成粒子贫化问题[5]。另一种方法是通过在建议分布中引进量测信息,如扩展粒子滤波(Extended PF,EPF)[6]、无迹粒子滤波(Unscented PF,UPF)[7]等。EPF和UPF等滤波算法可以以较高的计算代价来缓解粒子退化,但它们也面临着在量测噪声较大的系统中估计精度差的问题[8]。
与SPF、EPF和UPF等从单一建议分布中选取粒子的方式不同,文献[9]给出了一种多建议分布算法,其思路为从一系列不同的建议分布中选取样本,并且为了节约计算成本,该算法将权值设为固定值,但这会导致估计精度低的问题。为了获得更精准的估计结果,文献[10]提出了一种多模型采样粒子滤波(Multimode Sampling PF,MMSPF)算法,该算法的核心思想是采取多个基本建议分布混合的形式来表征建议分布。与文献[9]提出的方法相比,MMSPF算法可以获得更为精准的估计结果,但也会导致计算量大的问题,且由于每个基本建议分布的粒子选取是基于建议分布权重的随机选取,因此也会造成估计精度不稳定的问题。
为了在较低计算代价的前提下获得精准且稳定的估计结果,本文基于多建议分布的思路,提出了基于预测和量测的多建议分布粒子滤波(Prediction-and-Measurement-based Multiple Proposal Distributions Particle Filter,MPDPF-PM)算法。该算法首先分别从预测和量测中选取粒子点,并求取每个粒子点的权值;其次依据权值选取粒子点,通过粒子点个数来确定每个基本建议分布的权重;最后通过加权求和的形式获得均值和协方差。仿真结果证明了所提算法在估计精度和计算复杂度方面的优越表现。
本文其余内容安排如下:第1节简略介绍粒子滤波算法;第2节给出所提的MPDPF-PM算法的细节;第3节将所提算法与传统算法进行仿真对比分析;第4节对本文进行总结。
1 标准粒子滤波算法
考虑以下的状态空间,其中状态和量测方程分别表示为:
式中:xk为k时刻的状态向量;zk为量测向量;f(·)和h(·)分别表示非线性状态转移方程和非线性量测方程;wk-1和vk分别为过程和量测噪声,且它们是概率密度函数已知的随机变量。
给出k-1时刻的后验估计,则k时刻状态向量的后验概率密度函数的计算式为:
给出k-1时刻的后验估计,则k时刻的状态向量的后验概率密度函数的计算式为:
式中:z1:k=(z1,…,zk);p(x|xk-1)为状态转移概率函数;g(zk|xk)为似然函数。
在粒子算法中,后验估计可以用N个带权值的粒子点表示,所以式(5)可以表示为:
式中:δ(·)为狄利克雷函数;权值且
当式(6)中的粒子数无穷大,即N→+∞时,等式右面可以完全表征后验密度函数。最优的粒子点选取方式为从后验概率密度函数中直接进行选取,然而真实的后验估计通常是无法获取的。因此,需要构建建议分布,并从其中选取粒子点。
SPF算法的建议分布选取简单,可以避免沉重的计算代价;但其同样也会面临着粒子退化问题,即大部分粒子点的权值都过于小,而只有极少数的粒子点的权值大,从而造成了浪费计算资源的问题。重采样步骤虽然可以解决粒子退化,但会导致大部分的子粒子点都来源于同一父粒子点,从而造成粒子贫化的问题。相比于单一建议分布,由多个建议分布组成的混合建议分布可以更好地表征后验概率密度函数,因此在近几年获得了更多的关注。
2 基于预测和量测的多建议分布粒子滤波
假设混合建议分布由M个基本建议分布组成,则混合建议分布可以表示为:
式中:λk,j≥0,为第j个基本建议分布的权重,且有
对于多建议分布粒子滤波,两个关键的问题是如何确定基本建议分布,以及如何确定基本建议分布的权重。现有的基本建议分布通常是状态转移密度函数或者非线性贝叶斯滤波得到的后验估计,这对于历史信息有着较好的应用,却忽视了量测信息对于估计结果的影响。现有的基本建议分布权重设计方法包括固定权值法和计算复杂度高的权值设计方法,但这分别会带来估计精度低或计算量大的缺陷。因此如何设计基本建议分布以及如何确定每个基本建议分布的权重是本节主要研究的两个问题。
首先对于基本建议分布,为了充分利用历史信息和量测信息,拟分别将预测和量测作为基本建议分布,并从中进行粒子选取。给定系统的方程如式(1)和式(2)所示,则两个基于预测和量测的基本建议分布可以表示为:
式中:h-1(·)为量测方程h(·)的反函数。
基于式(9)和式(10),多建议分布可以表示为:
对于式(11)中基本建议分布权重的确定,为了在保证融合精度的前提下尽可能地减少计算时间,拟直接通过每个基本建议分布中有效粒子的数目来确定。
假设在基于预测的基本建议分布中选取了N个粒子点。同样地,在基于量测的基本建议分布中选取了N个粒子点。而后将分别从两个建议分布中选取的粒子点求取其似然,即:
根据每个粒子点的似然大小来确定粒子点是否为有效粒子点。为了维持粒子点数目不变,可以从多建议分布的2N个粒子点中选取似然最大的N个粒子点作为有效粒子点,选取的粒子点定义为假设在选取的粒子点中有N1个粒子点来自基于预测的建议分布,N2个粒子点来自基于量测的建议分布,则每个基本建议分布的权重可以定义为:
对于选取的粒子点,若其来自预测,则其权值可以由上一时刻的权值确定,即对于来自量测的粒子,其权值可以定义为归一化权值,即基于此,粒子点对应的权值更新公式可以表示为:
因此,k时刻状态估计的一阶矩和二阶矩可以分别表示为:
本文所提的粒子滤波算法的算法流程如算法1所示,由于粒子的选取基于最新量测,从而保证了滤波估计的精度。权值的设计采用计算有效的方法,可以避免繁重的计算量,从而具有较好的实际应用效果。

3 仿真验证与分析
3.1 单维仿真
给出以下状态空间模型:
式中:wk-1服从均值为3、协方差为2的伽马分布;vk服从均值为0、协方差为10-4的正态分布。
将本文所提的MPDPF-PM算法与SPF[1]、UPF[7]和MMSPF[10]算法在单维仿真场景中进行对比分析。粒子数设为120,仿真时间为50 s,蒙特卡洛仿真次数为100次。
仿真结果如图1所示。可以看出,相比于单一建议分布算法(SPF和UPF),多建议分布算法(MMSPF和MPDPF-PM)可以获得更好的滤波估计精度,这证明多建议分布在近似后验概率密度方面的有效性。相比于MMSPF算法,本文提出的MPDPF-PM算法可以更好地表征后验估计,因此可以获得更低的均方根误差(Root Mean Square Error,RMSE),这证明了所提算法在单维仿真场景中在滤波估计精度方面的有效性。
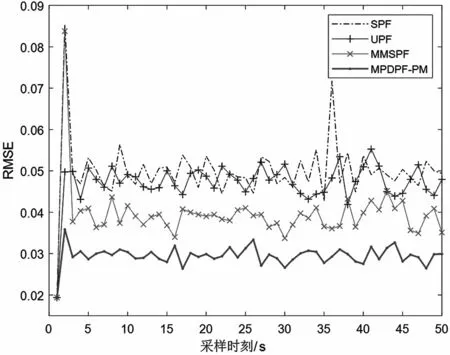
图1 4种算法的RMSE
各个算法的运行时间如表1所示,可以看出SPF算法的计算代价最小,UPF的计算代价最大,这是因为在UPF算法中,每个粒子都需要运行非线性滤波算法。相比于MMSPF算法,MPDPF-PM给出的粒子滤波算法计算复杂度更低,这是由于在MMSPF算法中,每个基本建议分布权重的计算占据了很大的计算内存,而在MPDPF-PM中,权值的计算则基本可以忽略不计,这证明了所提算法在单维仿真场景中具有较高的计算效率。
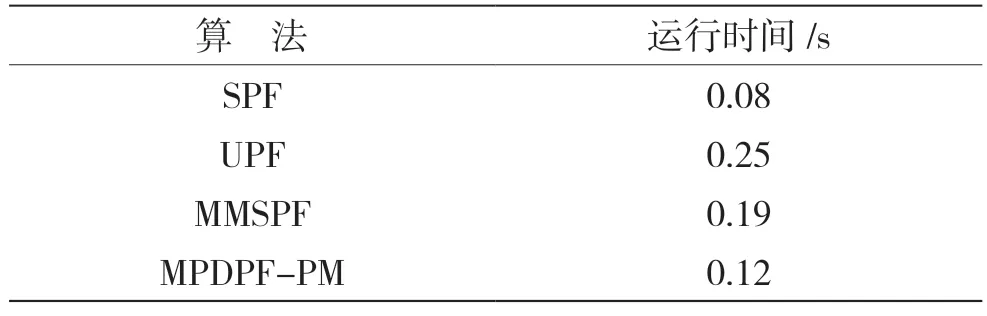
表1 各个算法的运行时间
3.2 多维仿真
考虑以下一个二维空间匀速直线运动的例子,运动方程可以表示为:
式中:采样时间T=1 s。
量测方程表示为:
量测值zk=(rk,θk)T,rk表示目标的径向距,θk表示方位角,量测噪声vk为混合高斯分布,其可以被表示为:
同样地,将本文所提算法分别与SPF[1]、UPF[7]和MMSPF[10]算法在多维仿真场景中进行对比分析。粒子数设为300,仿真时间为30 s,蒙特卡洛仿真次数为100次。
4种算法的仿真结果和仿真时间分别如图2和表2所示。可以看出,本文所提的MPDPF-PM算法可以以较低的计算代价获得最好的滤波估计结果,这与3.1节的结论基本一致,证明了本文算法在多维仿真场景中依然有较好的表现。
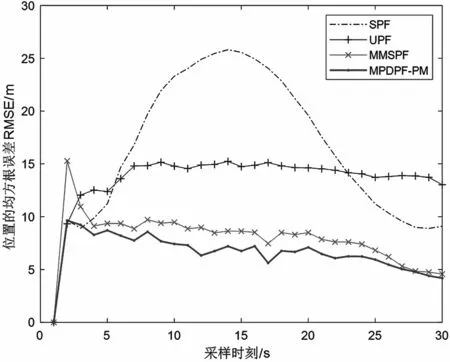
图2 4种算法位置的RMSE
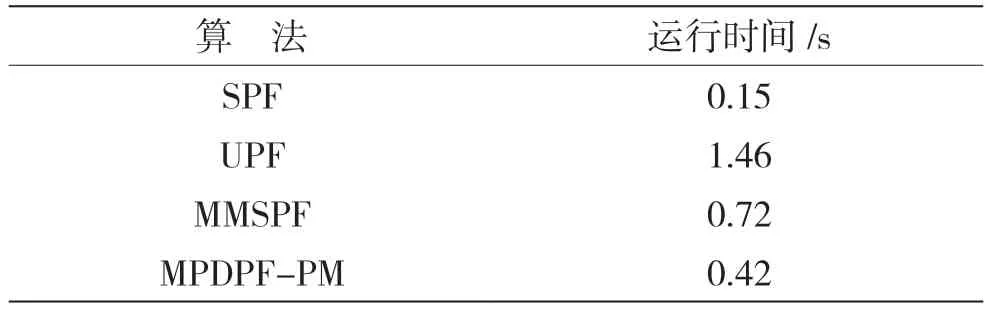
表2 各个算法单次运行时间
4 结语
为了解决粒子滤波算法的粒子退化和贫化问题,本文基于多建议分布,提出了一种新型粒子滤波算法。所提算法分别从基本建议分布选取和基本建议分布权重确定两个角度进行考虑。为了充分利用历史和当前信息,建议分布分别定义为预测和量测。为了减少计算代价,基本建议分布的权重通过粒子点个数来确定。最后通过粒子点加权求和的形式获得对于后验估计的一阶矩和二阶矩。仿真实验验证了所提算法在单维和多维场景中都有很好的表现。
