基于频域分析的空调温度控制系统的研究及仿真
2022-02-27孙小康
吴 杰,孙小康
(1.江苏省美术馆技术设备保障部,江苏南京 210018;2.扬州高等职业技术学校,江苏扬州 225003)
空调已普遍存在于人们的生产生活中,对改善室内的空气质量起着重要的作用。空调能耗占建筑物总能耗的一半以上。我国是一个资源紧缺的国家,空调的节能可靠运行有着非常重要的意义。计算机系统应用于空调系统可以实现对空调设备进行监督、控制和调节,改善空调系统的调节品质,提高可靠性和稳定性。所以近些年来对空调温度控制系统的研究已成为热点问题,空调温度受外界和内部环境温度、新风系统、季节变化等扰动影响,使室内温度变化波动较明显。空调系统结构复杂,无论是水系统冷量输配或风系统送风输出,通过管道行程长,路径复杂等原因,导致空调系统具有较强的时滞特性[1-2]。空调温度系统的被控对象常被看成具有时滞的一阶、二阶系统。工程上常采用基于响应曲线法的PID 整定、基于临界比例法的PID 整定等传统PID 方法对时滞系统进行控制,能够较好地控制,但是在超调量过大、调节时间过长、外部扰动过大时会对系统产生震荡现象,传统的PID 难以得到满意的控制效果。Smith 预估控制器的提出,有效地解决了时滞的补偿。针对控制系统的模型失配、外部扰动等原因导致控制效果不理想等问题,文中对Smith 控制器进行广义等效[3],等效后的被控对象不含时滞过程,对其选用PID 控制结构,对闭环系统的特征方程进行分析,按工程实际选用合适的调节时间,分析闭环极点,整定控制器的PID 参数。文中方法相对于传统的PID 整定、Smith 预估控制、内模-PID 整定方法具有更快的调节时间,超调量小,对外部干扰具有较好的鲁棒性。
1 Smith预估控制
1.1 预估控制理论
Smith 滞后补偿的方法是在被控对象的支路增加一个补偿器,使增加后的闭环传递函数的特征方程中不含有时滞环节,从而改善控制系统的性能及稳定性。实际上预估模型不是并联在过程上,而是反向并联在控制器上,对Smith 预估控制器进行等效[4],如图1 所示。

图1 Smith预估的控制框图
图2 中,引入Smith 预估补偿后闭环系统的传递函数为:
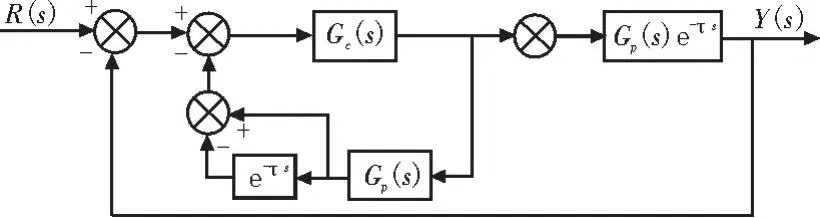
图2 Smith预估控制的等效图

式(1)中,Gc(s) 为控制器的传递函数,为被控制对象的传递函数,e-τs为被控对象的时滞环节。经过Smith 补偿后,系统闭环特征方程中不含有时滞环节,闭环特征方程决定系统的稳定性,由于不含时滞环节,系统的稳定性得到很好的改善。下面对Smith 预估控制进行仿真分析,并研究其性能特点。
1.2 Smith 预估控制器仿真分析
某空调室内温度控制对象一阶时滞环节的数学模型为[5]:

式中,惯性环节T=144,延迟时间为30,增益系数为0.99,输入信号为阶跃信号。系统仿真如图3所示。
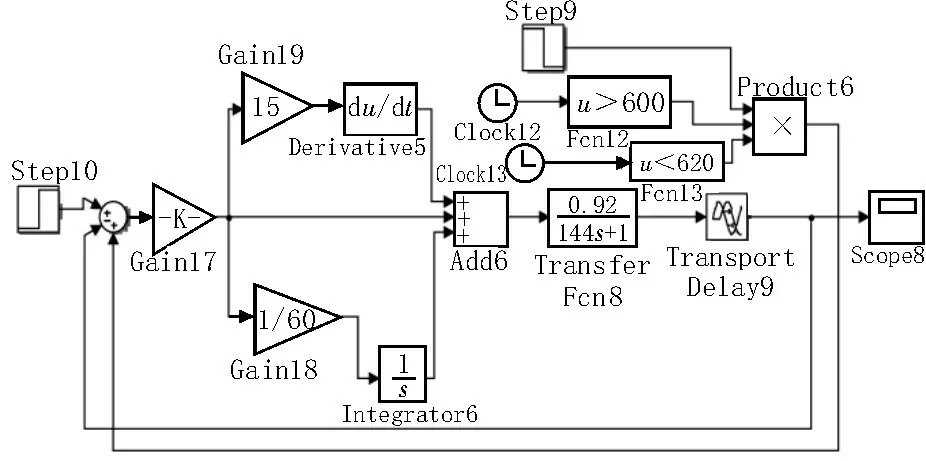
图3 响应曲线法的PID整定在扰动下的仿真
图3~5 的温度控制参考值均为25 ℃,采用响应曲线法PID 控制、Smith-PID 预估控制对被控对象进行仿真[6-8],其中对传统PID 进行工程整定,各控制参数取Ki=0.1,Kp=6.1,Kd=91.5,Smith-PID 预估控制取Kp=10,Ki=0.5,Kd=200,并在稳定时刻加入一个20 s 的外部阶跃扰动信号。从响应曲线可以看出,Smith-PID 预估控制在调节时间,超调量、扰动的恢复时间方面都比响应曲线的PID 控制优越,但同时Smith 预估控制仍有较大的超调量,且调节时间和扰动恢复时间较长、系统稳定性及鲁棒性性能不高。
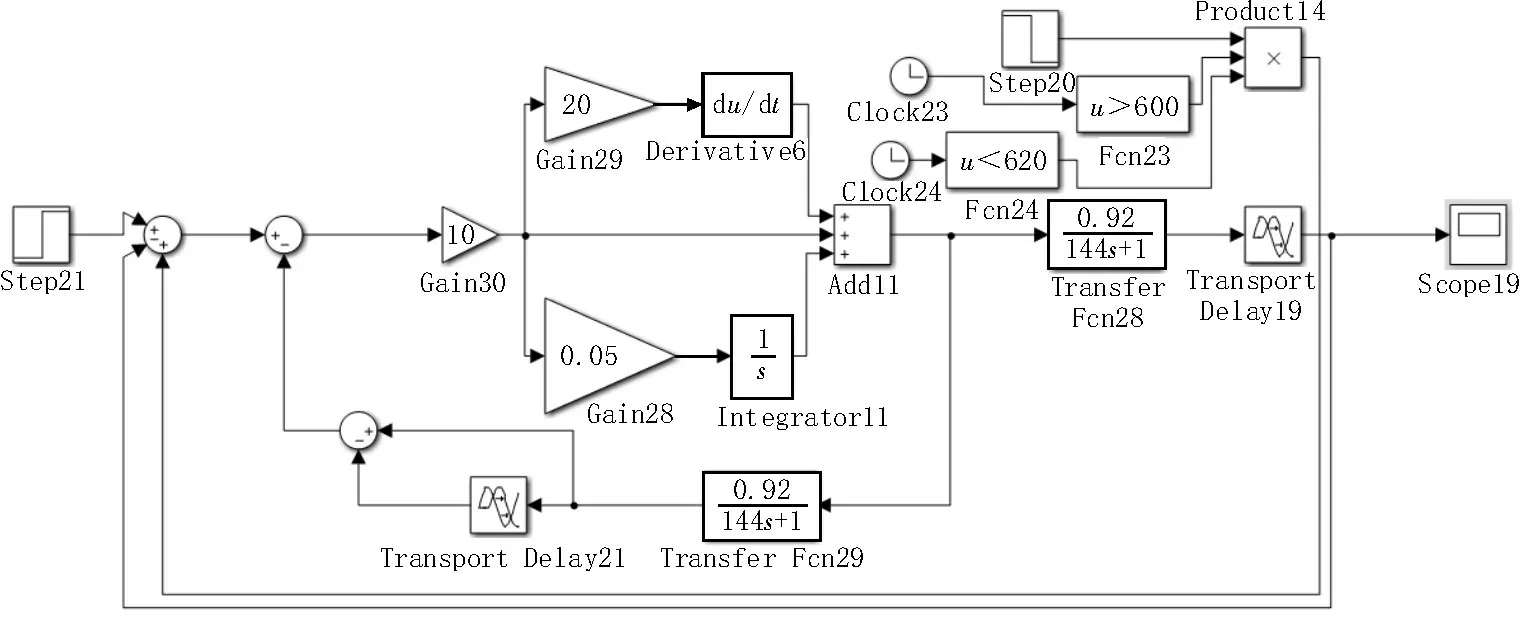
图4 Smith-PID预估补偿在扰动下的仿真

图5 扰动下二种控制方法的响应曲线
2 频域分析法的Smith控制器的改进
2.1 Smith 控制器等效分析
文中将预估控制器和被控对象广义等效,将图1的控制框图等效如图6 所示。

图6 Smith预估器的广义等效结构
其中,图6 的系统结构图可将虚线部分广义等效为不含有时滞的被控对象Gp(s),被控对象可以看成不含时滞的一二阶系统,分别对不含有时滞的一二阶系统选择PID 控制结构,针对二阶系统传递函数采用频域法进行分析:

2.2 一阶系统PID控制器参数整定
假设被控对象是一阶系统模型[9],传递函数为:

由式(4)可知,要使系统闭环传递函数化简为二阶系统的标准形式,拟采用PI控制器,用Gc()s表示为:

闭环系统的传递函数为:
被控对象为一阶系统的特征方程为:

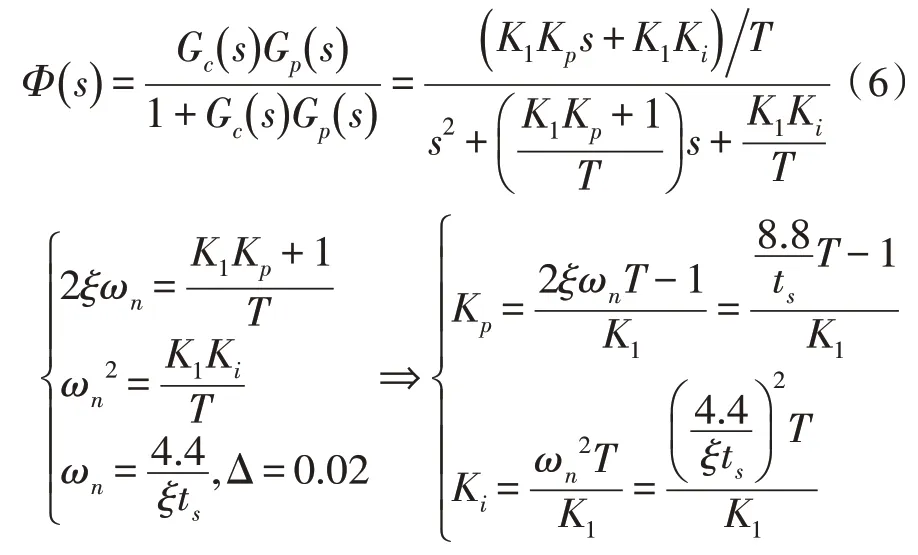
对于二阶系统来说,在系统理想的情况下,系统工作在欠阻尼状态,同时闭环系统的特征方程具有负实部的共轭复根。二阶系统传递函数标准的特征方程形式为[10]:

比较上式,可取:

2.3 二阶系统PID控制器参数整定
假设被控对象是二阶系统模型[11],传递函数为:

要使系统闭环传递函数化简为二阶系统的标准形式,拟采用PD 控制器,用Gc(s) 表示:

闭环系统的传递函数为:


参照式(7)~(10)的推导过程,被控对象为二阶系统的特征方程需满足:

根据工程实际情况选择调节时间ts,在已知被控的一阶、二阶时滞的空调房间温度的数学模型时,根据ξ、T1、T2、a、K1、K2等参数,分别计算一阶、二阶被控对象控制器的Kp、Ki、Kd值,通常取阻尼比ζ=0.4~0.8,文中取ζ=0.707。假设在某时刻加入扰动N(s),根据图6 的广义等效法,系统的输入输出关系可表示为:

其中,

根据系统的稳态误差和终值定理进行一般性推导如下:

同理,二阶系统E(∞)=0,可知一阶、二阶系统在时间趋于无穷时,系统稳态误差均为0,因此系统具有较好的稳定性和跟踪性能[12]。
3 实验仿真
3.1 一阶时滞空调温度模型
文中选取某空调温度模型的被控制对象为一阶时滞环节,其数学模型为:

分别采用Smith-PID 预估控制、内模PID 控制和文中的控制方法分别进行实验仿真。对于空调温度的一阶时滞系统,在某时刻加入20 s 的外界阶跃扰动信号,内模PID 控制[13]采用FOPTD 的方法进行PI参数整定,其中Kp=2.45,Ki=0.017,文中方法采用PI控制器选取调节时间ts=5,ζ=0.707,T=144,K1=0.92,τ=30,计算得到Kp=274.39,Ki=242.49,仿真结果如图7 所示。

图7 外界扰动下的3种控制系统的阶跃响应
3.2 二阶时滞空调温度模型
选取某空调温度模型为二阶时滞系统,根据有关空调房间与末端空调箱模型的文献[14-15]、空调的温度模型的二阶时滞系统,空调房间温度控制的传递函数G0(s)与末端空调箱的传递函数相乘可得:

选取和一阶时滞相同的方法进行仿真,内模PID控制采用SOPTD 的方法[16]进行PI 参数整定,其中Kp=0.1,Ki=0.387,Kd=0.001 6,文中方法选取调节时间ts=5 s,ζ=0.707,T1=60,T2=61,K2=10,τ=30,计算得到Kp=9.19,Kd=4.46,仿真结果如图8 所示。

图8 外界扰动下3种控制系统的阶跃响应
根据图7、图8、表1、表2 的实验仿真结果可知,文中方法的超调量比Smith-PID 预估控制明显减少,且在系统调节时间、过程中扰动恢复时间方面的指标远小于Smith-PID 预估控制和内模PID 控制,同时文中系统具有较好的跟踪性能和鲁棒性。
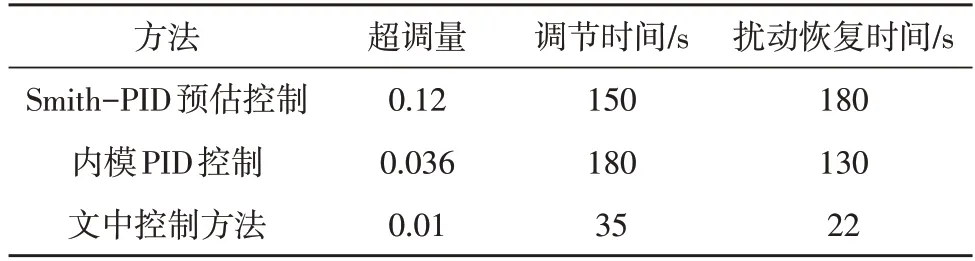
表1 系统性能指标

表2 系统性能指标
4 结论
文中提出了基于频域分析的空调温度控制方法,将Smith 预估器进行广义等效成不含时滞系统,根据二阶频域的标准特征方程进行极点优化配置,选取不同的PID 结构对一、二阶时滞进行控制,有效解决了空调温度控制的时滞问题。仿真结果表明,该方法具有超调量较小、调节时间和扰动恢复时间短的特点,同时具有快速跟踪扰动性能,可以为工程整定提供一定的参考。
