基于EDEM-Fluent 耦合仿真的小麦宽苗带精量电控排种系统设计与试验
2022-02-21赵晓顺赵达卫池丹丹柏文杰冉文静
赵晓顺,赵达卫,池丹丹,霍 倩,柏文杰,冉文静
(1.河北农业大学 机电工程学院,河北 保定 071001;2.唐山科技职业技术学院,河北 唐山 063000)
小麦条播方式是我国目前运用最为广泛的播种方式,省工省时,可改善小麦群体结构,但是种子易扎堆,均匀性较差,会导致个体发育差异化[1-3]。小麦宽苗带播种技术是1 种通过增大苗带宽度,扩大行间距,进而增加小麦个体生长空间的1 项高产栽培技术,与普通条播和撒播相比,小麦宽苗带播种技术可以提高小麦出苗率、促进分蘖,以致于提高成穗率、千粒重和产量[4-5]。但是目前配套宽苗带种植技术的播种机械很难实现真正的精播,基本采用机械槽轮式排种器排种,麦种经过分散器随机落到种沟内,存在伤种率高、苗带内种子分布不均匀等问题[6-7]。随着精量播种技术的发展,气力式排种器逐渐成为研究的主流[8-9]。国外用于大豆、玉米等中耕作物的气吸式精量排种器和气送式条播作物排种器已经非常成熟[10-13]。我国仍然以机械式排种器为主,气力式近些年研究较多,但仍处于试验阶段[14-15]。赵晓顺等研制了气吸式排种器实现了小麦和谷子的精量播种[16-17]。廖庆喜等设计了系列气力式油菜精量排种器并进行了试验[18-20]。程修沛等设计了气吸型孔组合式小麦精量排种器,通过仿真与台架试验进行了参数优化,获得了较好的单粒充种性能[21]。
精准农业的发展必然走向智能化[22-23],但是目前国内的精量排种器还是以机械式为主,由于田间环境较为复杂,驱动排种器运动的地轮会出现打滑现象,导致排种均匀性下降[24-28]。由电机驱动地轮,可以提高排种均匀性,且符合目前农业机械装备轻量化的趋势。张春岭等[29]研究了使用PWM 调速方式和基于遗传算法的PID 参数整定对直流无刷电机的控制实现;程修沛等[30]基于STM32 设计了小麦小区播种电控系统。
本文设计了1 种用于小麦宽苗带精量播种的电控排种系统,以提升播种均匀性、提高作业效率,为大面积推广小麦宽苗带精量种植技术提供硬件保障。
1 系统结构设计
1.1 系统整体设计
系统由排种器机械结构和电控系统组成。排种器为正负压式滚筒结构形式,主要由吸种滚筒、负压室、正压室、麦种盒、中心管轴、端盖、驱动齿轮等组成,结构如图1、图2 所示。
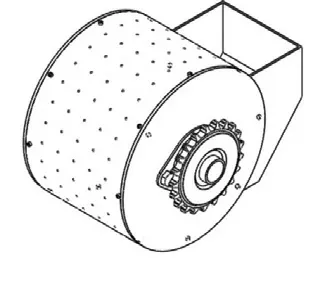
图1 排种器整体结构装配图Fig.1 Overall structure assembly diagram
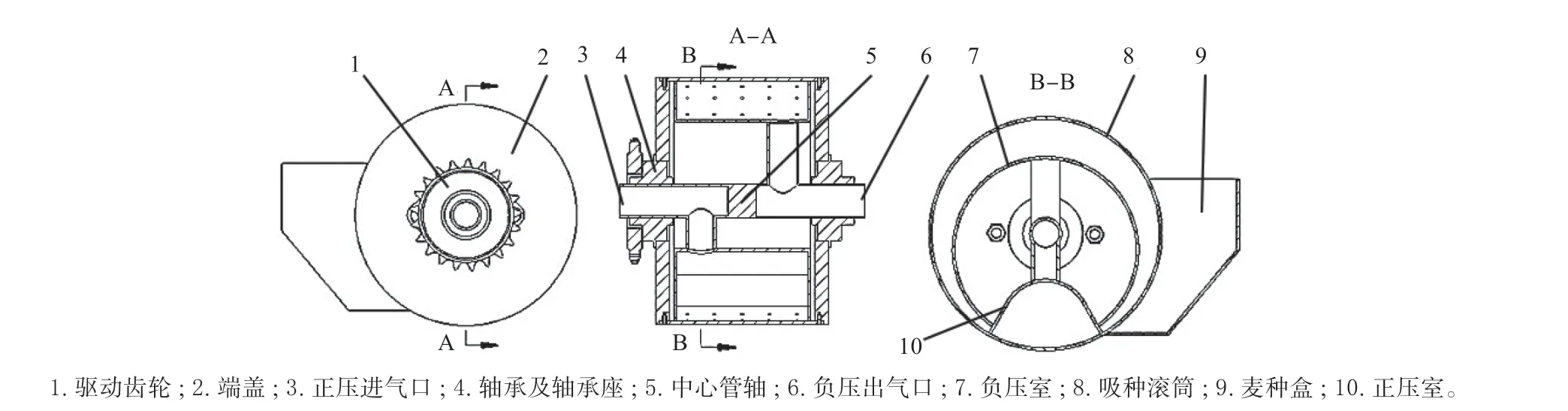
图2 排种器剖视图Fig.2 Sectional view of seed meter
种孔随吸种滚筒转动至麦种盒位置时,通过负压吸力将麦种盒内贴近吸种滚筒的麦种吸住,吸种滚筒转动至正压室下方位置时,麦种在正压力和自身重力的作用下脱落进入种沟,完成排种。整个排种过程中麦种均在气流作用下运动,伤种率大幅降低。
电控系统主要由单片机、直流无刷电机、电机驱动器、旋转编码器等构成,如图3 所示。单片机根据旋转编码器HN3806-AB-400N 获取的播种机作业实时速度得出电机理论转速,采用PWM 驱动电机,利用闭环反馈修正电机转速。
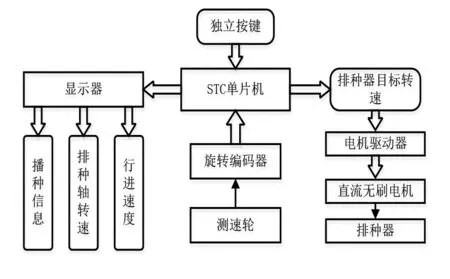
图3 电控系统结构图Fig. 3 Block diagram of electronical control system
1.2 系统电路设计
采用STC89C52RC 作为微处理器,电路图如图4 所示,主要包括复位电路、供电电路、振荡电路。
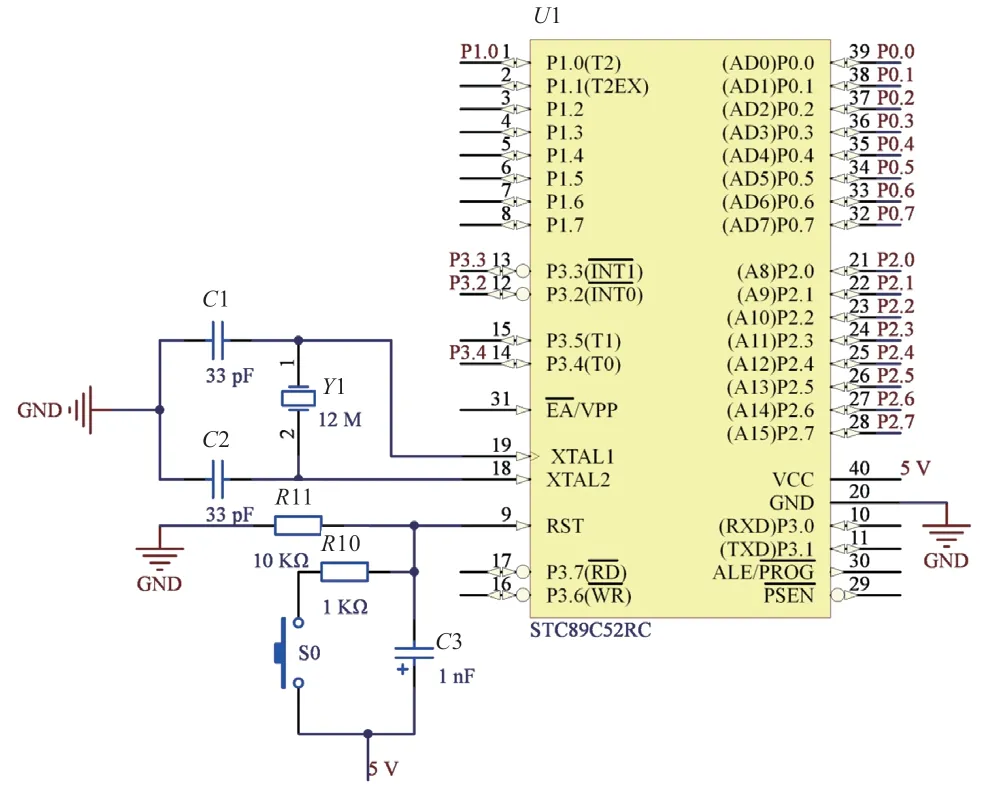
图4 STC89C52 单片机系统基本电路Fig.4 STC89C52 single chip system basic circuit
1.3 电机控制模块设计
根据转速及扭矩要求,选用80BL02 直流无刷电机,电机控制模块电路如图5 所示,U3 为BLD-300B 电机驱动器,其中RBF+与RBF-为电机提供电源,W、V、U、Hw、Hv、Hu为电机实现传感器信号传输;滤波后的电机转速信号SPEED 通过单片机的P3.2 口传输给单片机,实现电机转速的计算;PWM 信号通过与单片机P3.4 口相连的SV 完成传输。
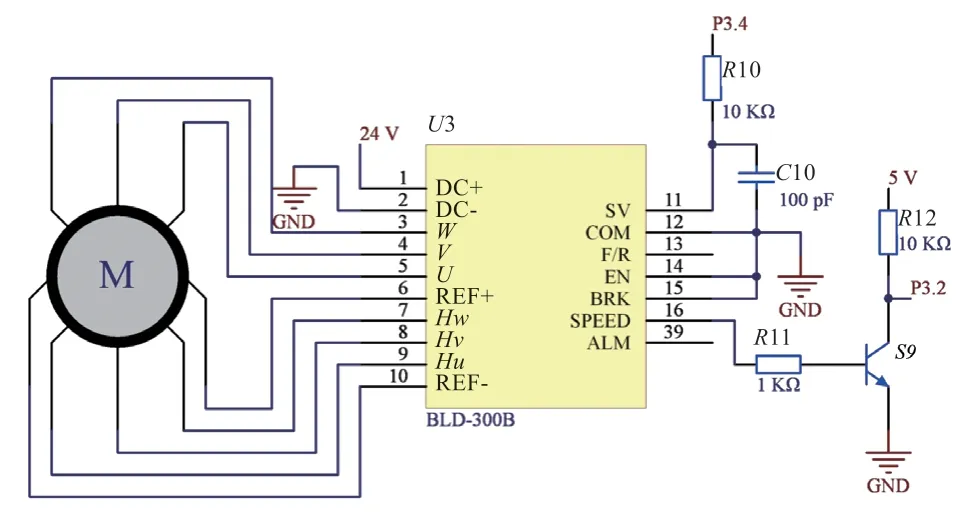
图5 电机控制电路Fig.5 Control circuit of motor
2 基于EDEM-Fluent 耦合的仿真分析
2.1 仿真参数与条件
排种器EDEM 模型如图6 所示,材料为不锈钢304。在EDEM 软件中为吸种滚筒添加线性转动。仿真分为2 次进行,第一次需要小麦颗粒先落入种箱内且保持稳定,第二次为滚筒旋转,排种器转速分别设置为15、19、23、27、31 r/min,2 次仿真时长均为5 s。
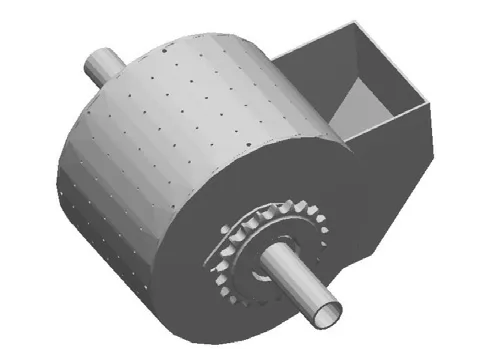
图6 EDEM 模型Fig.6 EDEM model
根据实际测得小麦种子尺寸的平均值,建立小麦种子模型并导入到EDEM 2020 中。图7 为小麦颗粒模型,尺寸设计为正态分布,表1 为EDEM 仿真的模型参数,物理接触模型设为Hertz-Mindlin(No slip)模型,种子下落初始速度设置为2 m/s,方向为重力方向,重力加速度设置为9.81 m/s2,总量为4 000 粒,生 成 速 度 为5 000 粒/s。EDEM 中 的时间步长的大小关系到总体的仿真总时间、能量传递的稳定性,所以仿真步长设置为5×10-5s ,即为Rayleigh 时间步长的28%。

表1 材料力学特性及相互作用参数Table 1 Material mechanical properties and interaction parameters
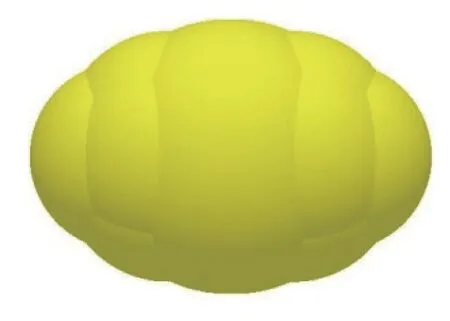
图7 小麦种子模型Fig.7 Wheat seed model
EDEM 第一次仿真完成后导出为Simulation deck, 在导出设置中set simulation time 为0 s,如图8 所示,仿真总时长为5 s。EDEM 打开前面导出的项目文件后,设置第二次仿真总时长为10 s,启动耦合服务,随后在Fluent 中进行设计:

图8 EDEM 导出设置Fig.8 EDEM export settings
(1)导入排种器对应的气流场模型,瞬态求解,重力设置在Y轴的负方向,选择标准k-ε湍流模型。
(2)流场材料为空气,设置在常温条件下,吸种负压为-3.0 kPa、正压为0.3 kPa,湍流强度均设为5%,种孔连通大气压。
(3)采用滑移网格为种孔添加旋转运动,速度与EDEM 中排种器转速保持一致。采用Simplic 算法计算求解,适当调大亚松弛因子,设置耦合的收敛精度为1×10-3,其它参数保持默认。
(4)打开UDF 加载对话框,加载EDEMFluent 耦合UDF 文件。加载成功后,双击Models-EDEM Coupling 弹出耦合设置对话框,点击Connect按钮连接EDEM,连接成功后同步到EDEM 时间,如图9 所示。
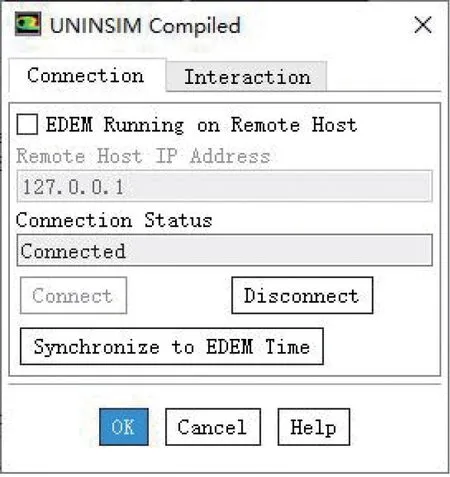
图9 耦合接口设置Fig.9 Coupling interface settings
(5)初始化后将时间步长设置为EDEM 时间步长的整数倍,即1×10-3。考虑到仿真总时长为10 s,设置步数为10 000 步,每个时间步最大迭代数为20步。点击Calculate 运行,耦合仿真开始。
2.2 仿真结果分析
EDEM 第一次仿真中,颗粒工厂不断生成种子,落在种箱中,在重力以及种群之间的摩擦力的作用下,种群逐渐稳定,如图10 所示。
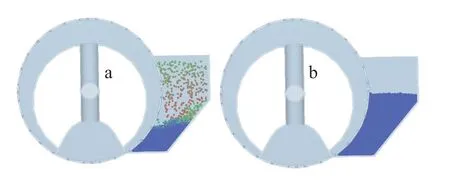
图10 小麦种子在排种器中的分布Fig.10 The distribution of wheat seeds in the seedmetering device
EDEM 第二次仿真结束至排种器稳定后,对处于滚筒最高处的种子进行统计,定义吸附单粒为合格,多粒为重播,未吸附为漏播,每一个参数条件下统计100 个,计算合格指数,重播指数以及漏播指数。
如图11 所示为种子的运动轨迹、速度和角速度变化情况,与实际情况一致,说明了仿真的可靠性。将15、19、23、27、31 r/min 等5 个不同水平下的仿真结果绘制成散点图,如图12 所示。由图可知:合格率随着转速的加快先增加后减少,重播率和漏播率反之,符合台架试验结果,说明仿真效果较好; 15 ~27 r/min 时合格指数≥80%,5 次试验结果中,漏播指数整体比重播指数低,23 ~31 r/min 时漏播指数变化明显,可见转速对漏播指数影响较大。
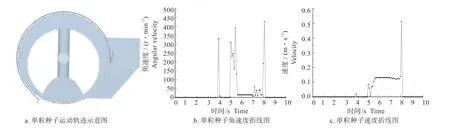
图11 小麦种子的运动轨迹、速度变化情况Fig.11 The trajectory and speed changes of wheat seeds
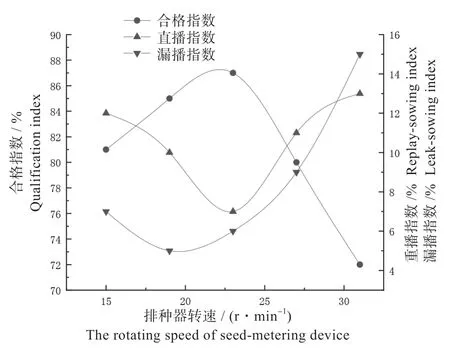
图12 不同排种器转速下的仿真结果Fig.12 Simulation results under different rotating speeds of seed-metering device
3 电控精量排种系统响应面试验
3.1 试验材料和设备
根据前面的结构及仿真分析,确定排种器基本结构参数,以不锈钢304 为材料制作滚筒,其他则为橡胶和碳素结构钢。试验以‘良星99’小麦为例,选用JPS-12 计算机视觉排种器试验台,以合格指数、重播指数以及漏播指数为评价指标,根据GB/T 6973—2005《单粒(精密)播种机试验方法》[32]技术标准展开试验,评价标准计算如公式(1)所示。根据农艺要求粒距为20 mm,对照JB/T 10293—2013《单粒(精密)播种机 技术条件》[33],确定播种作业合格要求为:粒距合格指数≥60%,重播指数≤30%,漏播指数≤15%。
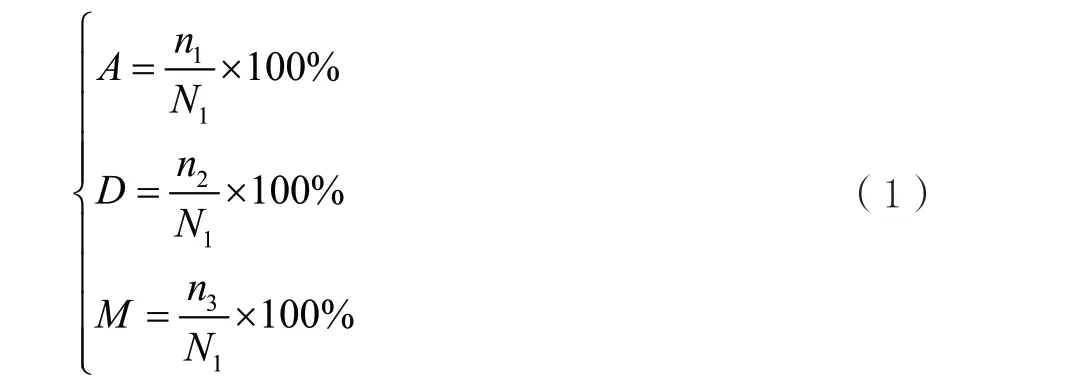
式中:M为漏播指数;A为合格指数;D为重播指数;n1为单穴单粒种子数;n2为单穴多粒种子数;n3为空穴个数;N1为理论排种个数。
3.2 响应面试验
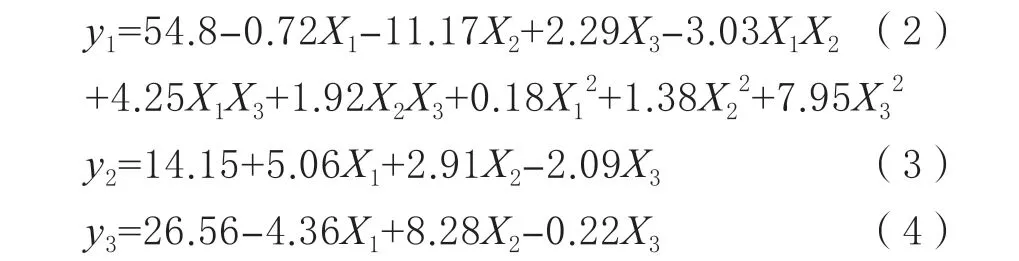
利用响应面试验分析排种性能与工作参数之间的交互作用,优化排种器的设计。通过单因素试验确定了吸种负压、排种器转速、投种高度3 个参数的取值范围。X1、X2、X3表示吸种负压、排种器转速、投种高度的编码值。公式(2)、(3)、(4)为通过多元回归拟合得到的合格指数的二次回归拟合方程以及漏播指数、重播指数的线性回归拟合方程。
根据以上回归模型,将其中1 个因素的编码值置于零水平,利用软件绘制其余两因素交互作用的响应面和等高线图。
(1)两因素对合格指数的交互影响
从图13 中可以看出,投种高度为140 mm 时,合格指数在吸种负压为-3.5 kPa 和排种器转速为19 r/min 处取最佳值69.01%。随着转速的增加,合格指数明显下降。当转速取27 r/min 时,合格指数接近40%。当转速较低时,随着吸种负压变化合格指数升降幅度较小。
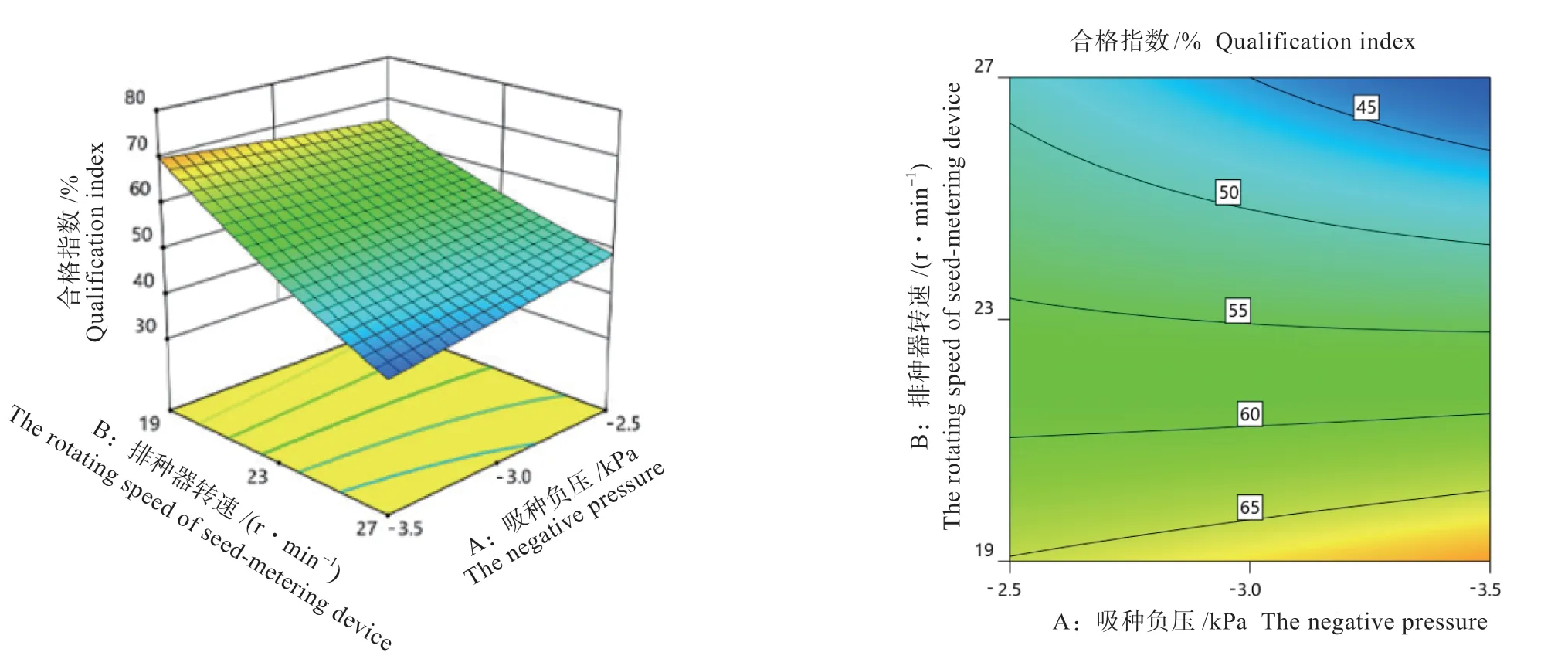
图13 吸种负压X1 和排种器转速X2 的响应面与等高线图Fig.13 Response surface and contour map of the negative pressure X1 and the rotating speed of seed-metering device X2
从图14 中可以看出,转速为23 r/min 时,合格指数在吸种负压为-3.5 kPa 和投种高度为180 mm处取最佳值69.48%。随着投种高度的增加,合格指数先降低后上升。当投种高度取140 mm 时,合格指数接近46.18%。当投种高度取180 mm 时,合格指数随着吸种负压绝对值的增加而升高;取100 mm时,合格指数随吸种负压绝对值的增加而降低。
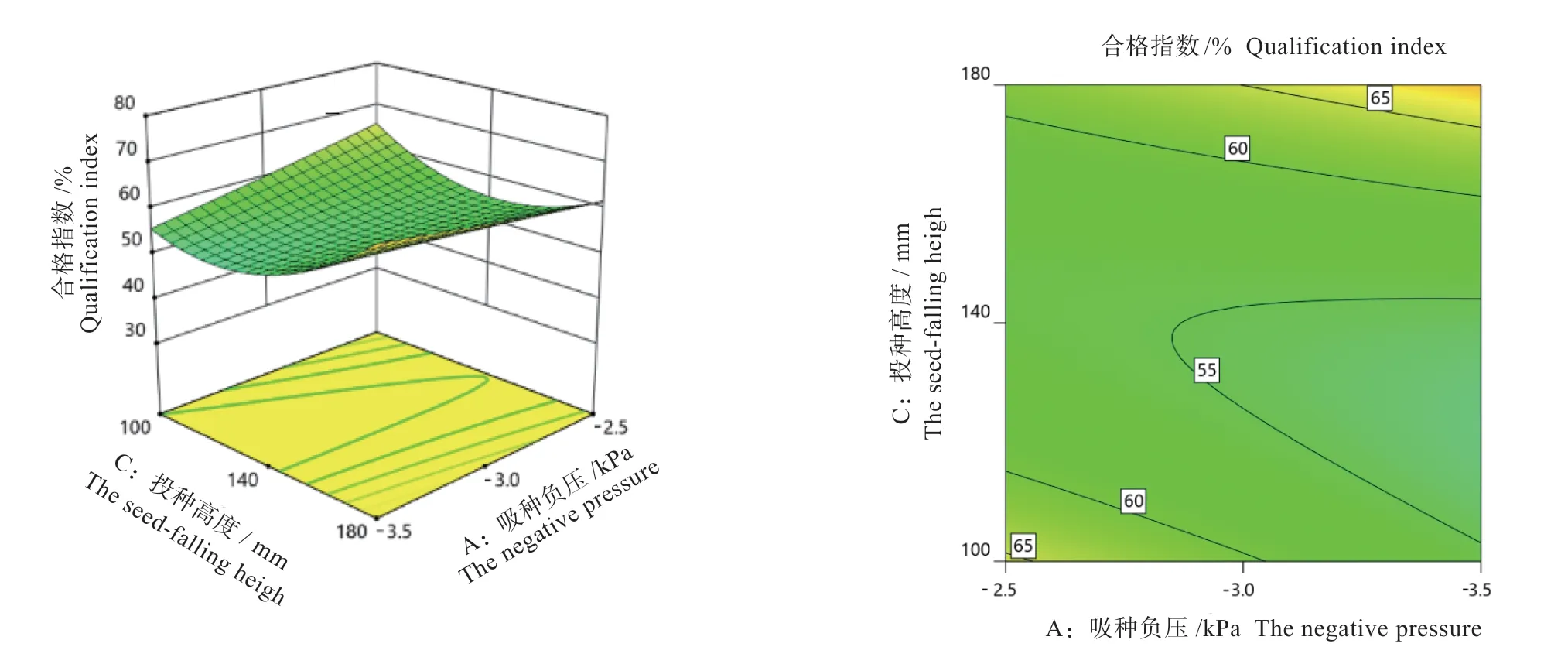
图14 吸种负压X1 和投种高度X3 的响应面与等高线图Fig.14 Response surface and contour map of the negative pressure X1 and the seed-falling height X3
图15 是吸种负压为-3.0 kPa 时,排种器转速和投种高度的交互作用对合格指数影响的响应面和等高线图。从图中可以看出,合格指数在排种器转速为19 r/min 和投种高度为180 mm 处取最佳值75.78%。随着排种器转速的增加,合格指数明显上升;随着投种高度的增加,合格指数先降低后上升,变化幅度不大。
图15 排种器转速X2 和投种高度X3 的响应面与等高线图Fig.15 Response surface and contour map of the rotating speed of seed-metering device X2 and the seed-falling height X3
(2)两因素对重播指数的交互影响
从图16 中可以看出,投种高度为140 mm 时重播指数在吸种负压为-2.5 kPa 和排种器转速为19 r/min处取最小值7.77%。随着排种器转速和吸种负压绝对值的增加,重播指数明显上升。
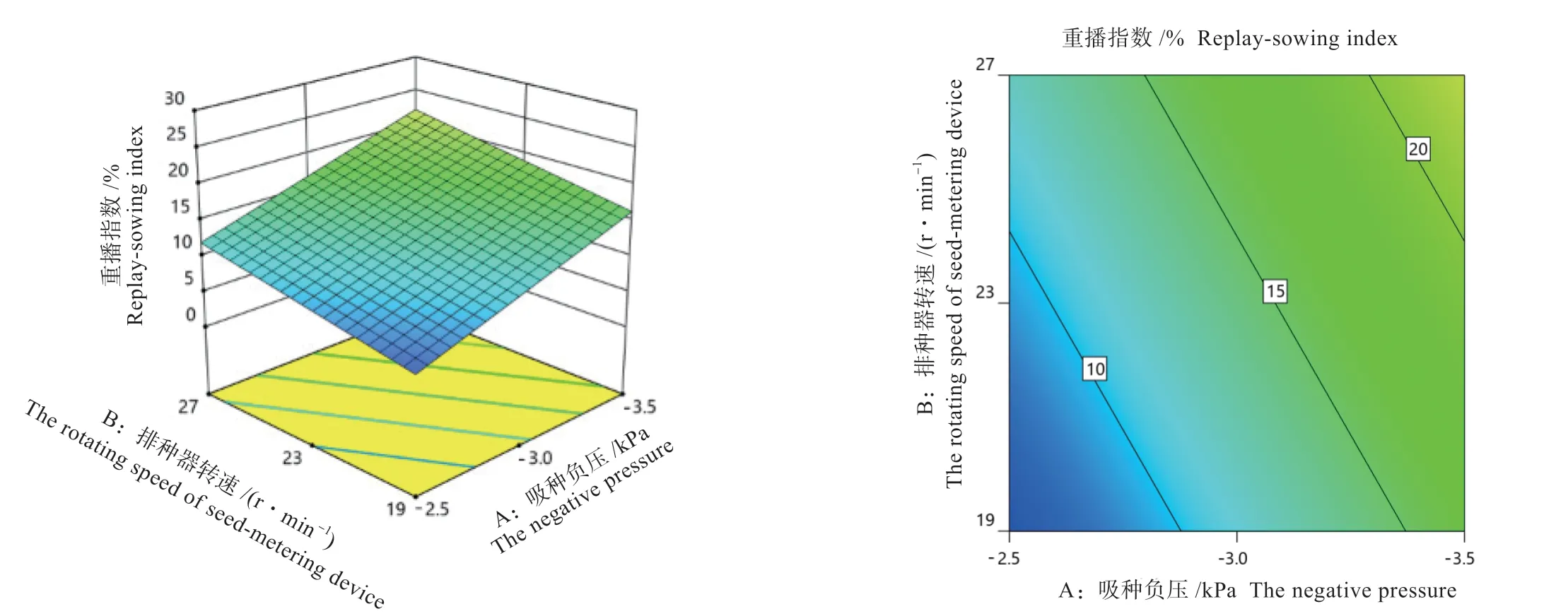
图16 吸种负压X1 和排种器转速X2 的响应面与等高线图Fig.16 Response surface and contour map of the negative pressure X1 and the rotating speed of seed-metering device X2
从图17 中可以看出,转速为23 r/min 时重播指数在吸种负压为-2.5 kPa 和投种高度为180 mm 处取最小值5.22%。随着吸种负压和投种高度的增加,重播指数明显上升。
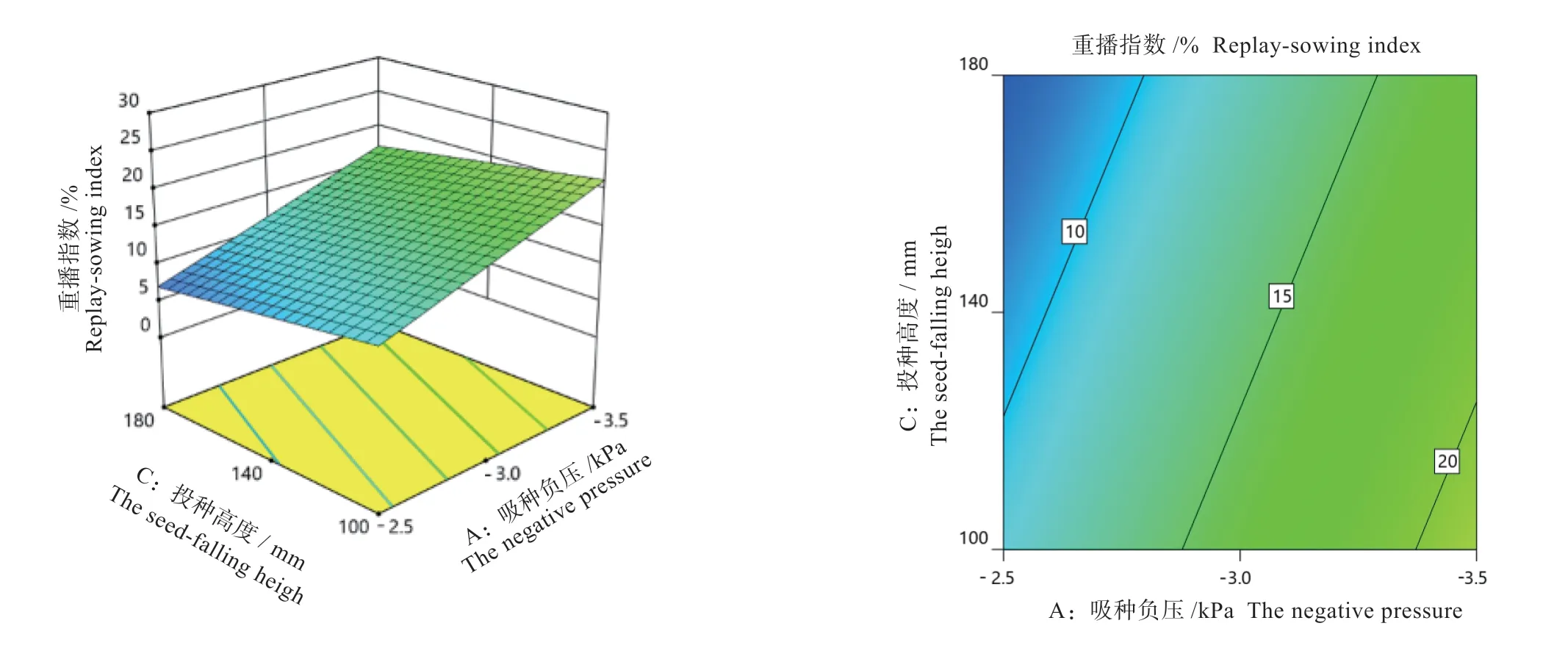
图17 吸种负压X1 和投种高度X3 的响应面与等高线图Fig.17 Response surface and contour map of the negative pressure X1 and the seed-falling height X3
从图18 中可以看出,吸种负压为-3.0 kPa 时重播指数在排种器转速为19 r/min 和投种高度为180 mm处取最小值12.25%。随着排种器转速的增加,重播指数上升;随着投种高度的增加,重播指数降低。
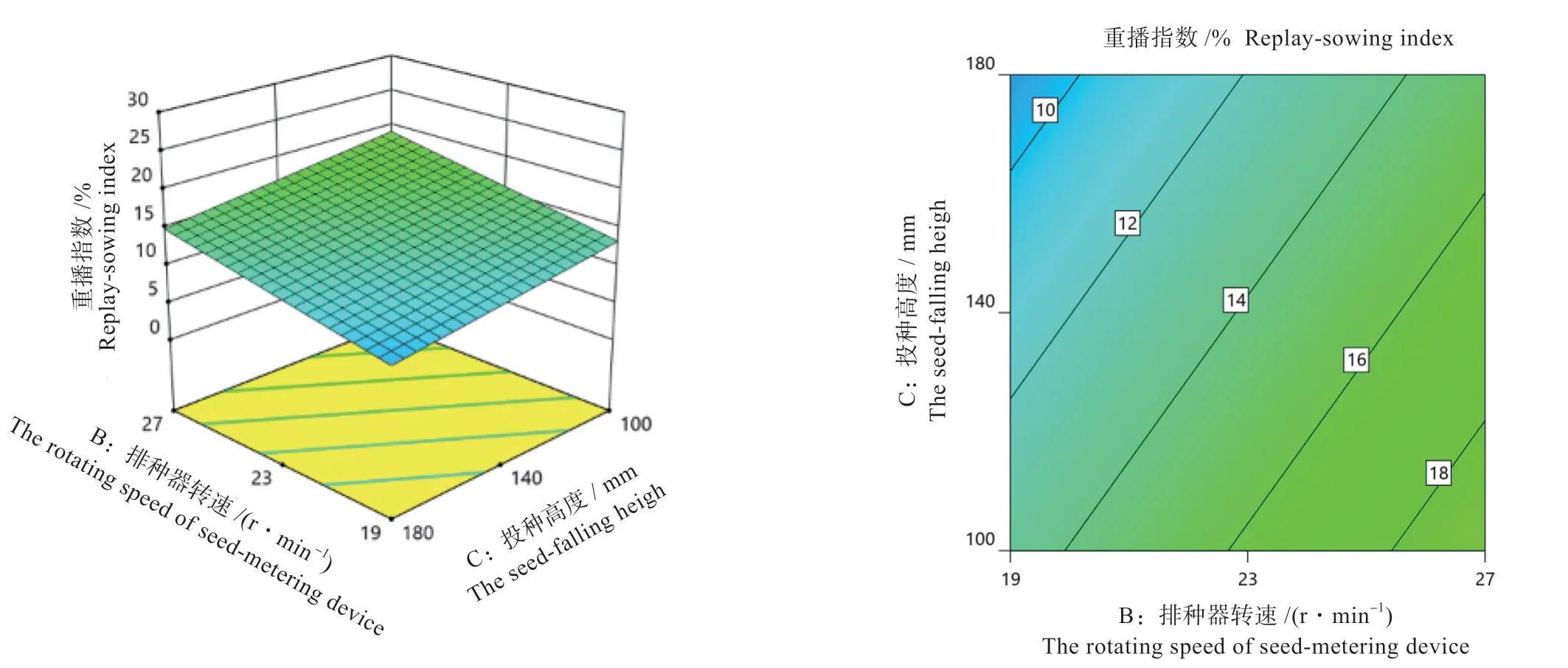
图18 排种器转速X2 和投种高度X3 的响应面与等高线图Fig.18 Response surface and contour map of the rotating speed of seed-metering device X2 and the seed-falling height X3
(3)两因素对漏播指数的交互影响
从图19 中可以看出,投种高度为140 mm 漏播指数在吸种负压为-3.5 kPa 和排种器转速为19 r/min处取最小值14.34%。随着排种器转速的增加,漏播指数明显上升;随着吸种负压绝对值的增加,漏播指数明显降低。
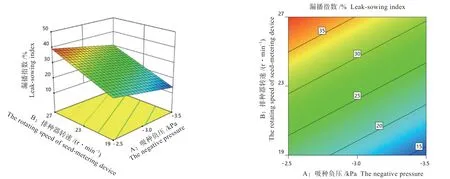
图19 吸种负压X1 和排种器转速X2 的响应面与等高线图Fig.19 Response surface and contour map of the negative pressure X1 and the rotating speed of seed-metering device X2
从图20 中可以看出,转速为23 r/min 时漏播指数在吸种负压为-3.5 kPa 和投种高度为180 mm 处取最小值18.90%。随着吸种负压绝对值的增加,漏播指数降低;随着投种高度的增加,漏播指数变化不明显。
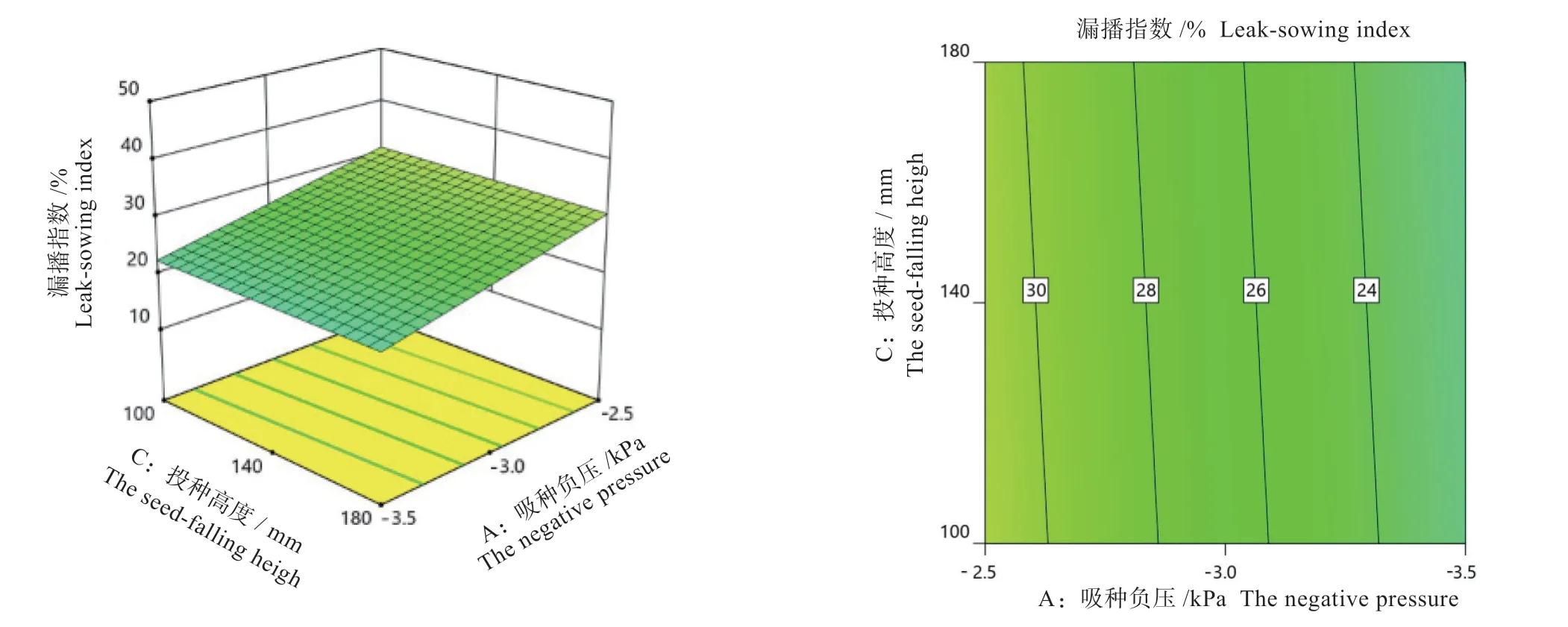
图20 吸种负压X1 和投种高度X3 的响应面与等高线图Fig.20 Response surface and contour map of the negative pressure X1 and the seed-falling height X3
从图21 中可以看出,吸种负压为-3.0 kPa 时漏播指数在排种器转速为19 r/min 和投种高度为180 mm处取最小值11.79%。随着转速的增加,漏播指数明显上升;随着投种高度的增加,漏播指数变化不明显。
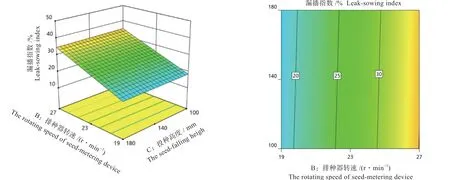
图21 排种器转速X2 和投种高度X3 的响应面与等高线图Fig.21 Response surface and contour map of the rotating speed of seed-metering device X2 and the seed-falling height X3
3.3 参数优化与试验验证
对上述的回归方程进行求解,优化后得到如下函数:
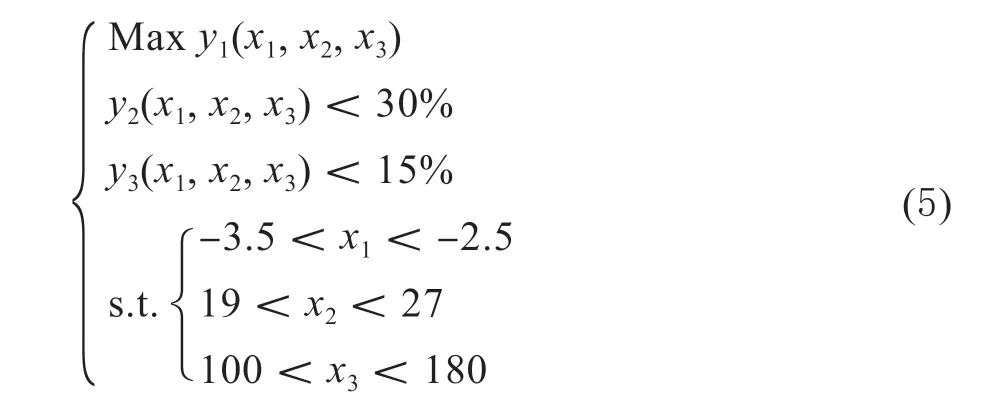
进行数值优化求解后,得到优化后的参数组合:吸种负压-3.5 kPa,排种器转速19 r/min,投种高度180 mm。
根据优化后的参数进行3 次台架试验,最终结果区平均值为:合格指数80.62%,重播指数9.22%,漏播指数10.16%。满足行业标准[33]的指标要求:合格指数≥60%,重播指数≤30%,漏播指数≤15%。
4 结论
(1)针对传统排种器排种均匀性差的问题,设计了1 套用于小麦宽苗带电控排种系统,排种器机械结构采用正负压组合滚筒形式,使用直流无刷电机驱动排种器,伤种指数低,均匀性好。
(2)通过EDEM-Fluent 耦合的仿真分析可知,合格率随着排种器转速的提升,先增加后减少,重播率以及漏播率反之,经过台架试验验证,发现变化趋势一致,说明仿真结果的可靠性;15 ~27 r/min时合格指数≥80%,5 次试验结果中,漏播指数整体比重播指数低,23 ~31 r/min 时漏播指数变化明显,可见转速对漏播指数影响较大。
(3)通过响应面试验得到排种器较优参数组合:吸种负压-3.5 kPa,排种器转速19 r/min,投种高度180 mm,利用试验进行验证,结果为:重播率9.22%,漏播率10.16%,合格率80.62%,满足JB/T10293—2013《单粒(精密)播种机技术条件》中的技术指标要求。
