基于测控基带备机的防错锁方法改进
2022-02-20韩雷岳世磊谢承伯李彬李魁杰
韩雷,岳世磊,谢承伯,李彬,李魁杰
(西安卫星测控中心,陕西西安,710043)
0 引言
某型测控站在测控活动过程中,当测控基带主机A机完成双捕后,发现基带备机B机载波错锁。在后续测控活动中对此载波错锁现象进行了重点关注,发现双捕完成后,备机有一定概率出现错锁。纵观多次错锁现象,载波错锁信号有一定随机性,不能单纯界定为外界干扰引起。为保证测控基带在测控活动过程中,能够稳定准确锁定目标信号,确保信号接收质量,遂需研究测控基带备机双捕过程中防错锁的方法。
1 原理及错锁原因分析
1.1 接收机载波锁定原理
标准TT&C接收机原理如图1所示,下行信号经天线、低噪声放大、下变频后,测控和路中频信号送测控基带分机:首先由频率快速捕获(频率引导)单元完成载波频率及载波频率变化率测量,实时将测量结果送主接收机载波锁相环,辅助载波环捕获跟踪,载波锁定后解调出遥测副载波及测距信号,送遥测单元及测距单元。[1]

图1 标准TT&C接收机原理框图
当双捕流程开始时,调制器以预设的扫描速率进行频率扫描,基带监控软件会根据双向光行时进行延时后将频率扫描参数信息发送给接收机和频率捕获模块,作为预报的先验信息辅助频率捕获模块进行快速正确的捕获,从而辅助接收机中的载波环路对载波进行捕获和锁定。
载波环路在频率捕获单元提供的多普勒信息辅助下对载波进行捕获后会进行防错锁判断。锁定后的载波环路除非再次失锁,否则不会再对频率捕获单元的捕获结果进行判定和使用处理。频率捕获单元和载波环路单元的具体工作流程如下所述。
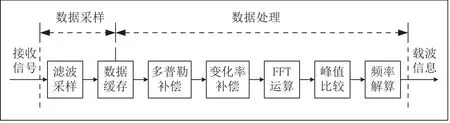
图2 频率捕获单元结构原理流程图
1.1.1 频率捕获单元工作流程
频率捕获单元结构原理流程见图2,首先根据下发的多普勒信息辅助数据对信号进行滤波采样和下变频处理,输出零中频信号写入数据缓存空间;然后进行数据处理,对采样数据进行载波多普勒频率及其变化率的双重补偿,多轮次地复用FFT资源;最后对FFT后的数据进行频谱峰值比较,得出频谱峰值进行频率解算,最终得到当前时刻的载波多普勒频率值[2]。
1.1.2 接收机工作流程
接收机中载波环根据频率捕获模块给的多普勒信息来设置环路中心频率进行跟踪。目前设计状态下,频率捕获模块输出的多普勒信息的取用分两种情况:
(1)若载波环失锁,立即取当前的捕获结果来设置环路中心频率,并对载波环进行复位。
(2)若载波环锁定,则判断环路错锁指示信号是否有效,若有效,则立即取当前的捕获结果来设置环路中心频率,并对载波环进行复位;否则,保持上一次的中心频率值,不做其他操作。
环路错锁判决只在环路从失锁到锁定的过程中判决1次,一直锁定后将不进行判决(不进行判决时错锁指示信号无效)。环路错锁判决过程如下:
(1)计算当前频率捕获模块输出的多普勒和载波环输出的多普勒的差值;
(2)判断两者的差值是否大于设定的门限;
(3)连续统计3次,若有两次差值大于门限,则认为环路错锁,错锁指示信号有效;否则,认为环路正常锁定,错锁指示信号无效。
1.2 错锁原因分析
在测控基带主机进行双捕时,接收机和频率捕获单元会在调制器的扫描信息辅助下对载波频率进行正确的捕获和跟踪,然而由于测控基带备机并不发出上行信号和起扫,因此其接收机和频率捕获单元无法获取扫描信息预报。鉴于系统接收机和频率捕获模块在无扫描信息辅助下所能适应多普勒变化率有限(举例为A)当外界信号多普勒及变化率小于等于A时,捕获单元能捕获到正确的多普勒值及变化率,从而引导接收机正确捕获跟踪,当外界信号多普勒及变化率大于A且无预报信息时,捕获单元将无法捕获到正确的多普勒值以及变化率,不能辅助载波环路对载波频率进行正确的捕获跟踪。
由于扫描过程中信号频率一直变化,当频率捕获单元捕到频谱中的一个信号频率时,并引导载波锁相环进行锁定。当载波环路跟踪到的频率与频率捕获单元的捕获结果恰好满足判错锁条件时,载波环路便锁定在了该错误的频率上。由于一旦锁定只要不再次失锁则捕获将锁定出的频率与捕获单元的捕获结果进行比较判断,因此即便扫描结束后,频率捕获单元捕获到了真实正确的载波信号后,载波环路也会一直锁定在之前的错误频率上。[3]
2 模拟测试试验及软硬件修改验证
2.1 模拟测试试验
针对测控基带备机错锁现象,进行了多次反复测试,主机均未出现错锁。具体模拟测试试验环境如图3所示。其中基带A用于模拟指定场景下的主机,基带B用于模拟指定场景下的备机。基带A机的上行信号经信道模拟器模拟上行链路环境后送入联试应答机,经联试应答机转发后模拟下行链路环境并加入噪声后功分两路分别输入基带A机和基带B机。

图3 模拟测试试验环境框图
进行了50次双捕流程试验,统计双捕完成后基带A机和基带B机的锁定是否正确。50次试验中,基带A机全部正确锁定,基带B机出现18次错锁。
2.2 软硬件修改验证
针对测控基带备机错锁问题,进行如下软硬件修改及验证:
(1)修改备机模式下软件逻辑流程,即当基带处于备机状态时,“判错锁”开关打开。
(2)修改测控接收机DSP程序代码逻辑(见图4),将备机的捕获和载波环路工作方式设置为一直判错锁,这样可以保证即使在扫描过程中有错锁可能,在扫描信号回零后,备机能够正确锁定。

图4 DSP程序代码逻辑修改前后对比
(3)新增基带监控与接收机之间的主备机状态接口,对基带监控软件进行适应性调整。
修改完成后进行了50次双捕流程试验,测控基带B机(备机)在双捕完成后均未出现错锁。
3 结论
本次测控基带软硬件修改,从根本上解决了,当扫描速率超过了频率捕获单元的捕获能力时,频率捕获单元无法捕获到正确的多普勒值以及变化率,也不能辅助载波环路对载波频率进行正确的捕获跟踪,导致测控基带备机错锁的问题。既是对测控基带备机双捕过程中防错锁的方法改进优化的有益尝试,也为复杂电磁环境下测控活动的正常捕获跟踪提供有效保障,对于其他测控装备性能改进也有一定的借鉴意义。