基于DOE方法的射击机器人发射机构测试性能影响因素分析
2022-02-04幸琳乔何俐萍索浩良刘靖
幸琳乔,何俐萍,索浩良,刘靖
基于DOE方法的射击机器人发射机构测试性能影响因素分析
幸琳乔,何俐萍*,索浩良,刘靖
(电子科技大学 机械与电气工程学院,四川 成都 611731)
为克服常见射击机器人存在的弹丸打击准确性不高、发射波动性大等问题,以摩擦轮发射机构为研究对象,提出一种基于试验设计(Design of Experiment,DOE)方法的射击机器人发射机构性能设计和分析方法。首先,通过分析发射机构运动关系,利用赫兹接触理论建立弹丸发射加速度模型,确定摩擦轮的半径、材料属性和单边最大过盈量三个可控因素,筛选出试验影响因子。其次,对三个可控因素进行试验设计并建立因素影响模型,进行发射机构影响因素的参数优化。同时,通过方差分析法验证摩擦轮的材料和单边最大过盈量对弹丸发射影响的显著性;最后,对设计的参数进行可测试性分析,测试不同的试验条件下弹丸发射性能水平。实验结果表明弹丸发射初速度达到28 m/s,命中静止目标的概率为97 %,在满足设定的弹丸发射指标要求前提下,保证了射击机器人的发射准确性和稳定性。
机器人发射机构;可测试性;影响因素;参数筛选;方差分析法
当前,具备自主移动、自主射击等功能的射击机器人,如:发球机器人[1]、灭火弹发射机器人[2]和武装射击机器人[3],广泛应用于各个领域。发射机构是射击机器人完成发射任务的关键机构,常见的有电磁发射、气动发射和离心发射等[4]。气动发射机构发射可靠性较高,但需要设置储气、缓冲等装置,结构较复杂[5-6];电磁发射在发射过程中会受炮口高速、高温、高压拉弧的影响产生扰动,直接影响发射精度[7];离心发射机构装置因体积较大,多用于太空发射[8]。电动源发射通过高速运行的摩擦轮带动弹丸射出(如图1),结构简单、无需火药,具有安全性好、噪音小、弹丸初速可调、适应范围广等优点,可对目标进行非致命打击,是一项在船舶反海盗、油库巡防、安保巡查等领域运用前景突出的新型发射技术[9-10]。

图1 摩擦轮发射机构
通过摩擦轮发射机构的不同类型考察机构性能,双轮驱动比单轮驱动的优势明显[10]。双轮摩擦轮发射机构通过直流无刷电机,可驱动摩擦轮以一定预设速度转动,完成枪管中弹丸的加速。但实际射击过程中,存在弹丸打击不准确、发射有波动性等问题。如何保证弹丸打击准确和发射稳定,成为影响摩擦轮发射机构使用的主要制约问题[10-11]。方弄心等[12]基于对炮弹发射机器人的设计和实现并完成调试,克服了传统炮弹发射机器人只可远距离发射及发射准确率低的缺点;王培源等[13]对电动源发射的摩擦轮材料分析,提高了电动源发射的稳定性。但目前就摩擦轮发射机构的性能设计和影响分析方面的研究仍显不足。
论文以射击机器人电动源发射机构为研究对象,提出一种基于DOE方法的弹丸发射的主要影响因素分析方法,以期在试验设计过程中对影响因素进行优化并指导参数选择,提高机器人弹丸发射的准确性和稳定性。
1 摩擦轮发射机构运动分析
通过对摩擦轮发射机构的弹丸运动过程进行分析,建立弹丸加速度模型,针对弹丸的固有参数,分析摩擦轮发射影响性因素。
1.1 摩擦轮发射机构运动模型
如图2所示,弹丸与摩擦轮开始接触时,弹丸受到拨弹装置和置位装置影响,具有一定的初速度,摩擦轮由电机带动。

v0为弹丸沿运动方向的速度,m/s;M为电机转矩,N·m;v1为摩擦轮线速度,m/s。
根据赫兹接触理论分析[13],如图3所示,弹丸在与摩擦轮接触过程中受到和的作用,两个力共同作用挤压弹丸沿方向运动,弹丸受到的载荷为,和的函数关系为:

式中:1和2分别为弹丸和摩擦轮的弹性模量,MPa;1和2分别为弹丸和摩擦轮的泊松比;1和2分别为弹丸和摩擦轮的半径,mm。
随着弹丸的运动而变化,运动到与摩擦轮圆心连线中点时,达到最大,即为单边最大过盈量max。
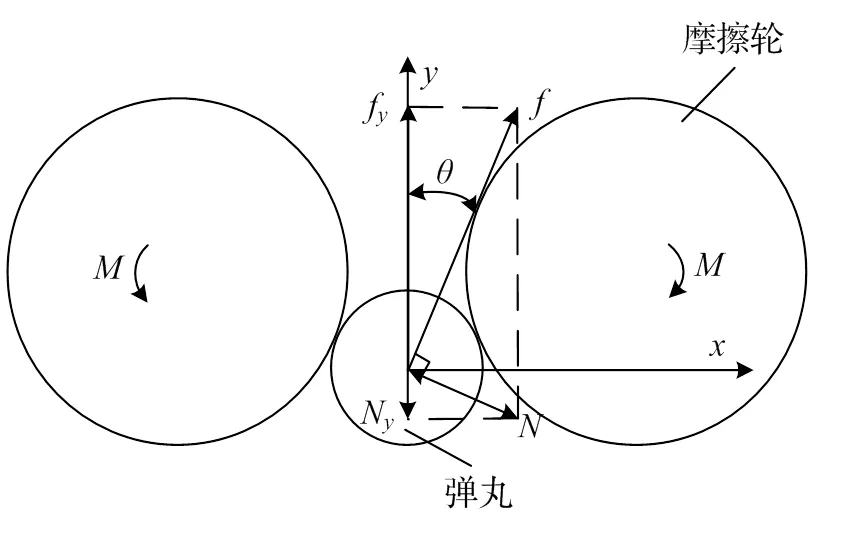
N为摩擦轮的压力,N;f为摩擦力,N;δ为变形量,mm;fy为f在y方向上的分力,N;Ny为N在y方向上的分力,N。
如图4所示,弹丸运动方向为轴方向,弹丸在运动过程中,与N之间的关系为:

式中:;x为弹丸沿运动方向的位移,mm;l1为运动过程中弹丸与摩擦轮之间的球心距,mm;l2为弹丸进入和离开摩擦轮时两个位置之间的球心距,mm。
弹丸在运动过程中,和的关系为:
式中:为摩擦轮与弹丸之间的摩擦系数。
与其在运动方向上的分力f之间的几何关系为:
对弹丸沿运动方向的发射过程进行分析,弹丸受到两个摩擦轮的合力作用:

式中:F为弹丸受到的合力,N。
根据牛顿第二定律可得弹丸加速度与F之间的关系,综合式(5),弹丸加速度的数学模型为:

式中:为弹丸的质量。
1.2 弹丸发射速度影响因素分析
设计试验中使用的发射弹丸型号为17 mm,其固有参数如表1所示,结合式(6)可知,影响弹丸最终发射速度以及最大接触应力主要为弹丸的材料参数、摩擦轮的材料参数和摩擦轮对弹丸的挤压量,主要包括摩擦轮和弹丸的半径、弹性模量以及弹丸和摩擦轮接触过后的挤压量。基于弹丸固有参数已经确定,本文对发射机构中的摩擦轮的半径、摩擦轮的材料和单边最大过盈量三个可控因素进行分析。

表1 17 mm弹丸参数表
2 弹丸发射机构指标
2.1 弹丸发射初速度
在弹丸发射中,弹丸发射初速度的大小反映弹丸的打击距离,具有决定性的作用[14]。因此,需要将弹丸初速度作为一个衡量机器人发射机构性能的射击指标。
针对不同型号的弹丸,弹丸的发射初速度有相应的限制,如表2所示,低于最低发射初速度则视为发射无效,试验中使用的是17 mm弹丸,最低发射初速度为12 m/s。
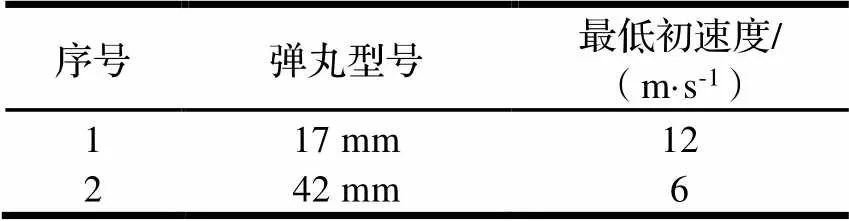
表2 不同型号弹丸的最低初速度
由于弹丸在发射过程中,不可避免地会对车体产生一些扰动,从而影响发射稳定性,通过控制底盘参数可以控制车体扰动,降低其对发射稳定性的影响[15]。
因此,根据机器人的最大底盘功率依次划分性能等级[16],根据性能等级的不同,设置初速度上限值,如表3所示,本试验设计中弹丸最大发射初速度限制为30 m/s。

表3 不同性能等级机器人的弹丸发射初速度上限值
同时,当摩擦轮持续受到较大接触应力时,摩擦轮表面会出现磨损或失效等现象,导致其性能下降,进而影响弹丸发射的稳定性[17]。因此,在弹丸发射过程的参数设计时,不仅要考虑弹丸最终的发射速度,还要考虑摩擦轮受到的最大接触应力,在满足设计标准的发射速度情况下,尽可能的减小最大接触应力,控制摩擦轮的磨损,保证弹丸发射的稳定性。
2.2 弹丸发射频率与射击散步范围
考虑到机器人运动过程中的综合射击性能,即在满足单次射击的准确性的前提下,具有良好的连续射击的稳定性,试验中对弹丸的最大射击频率的性能指标拟定为20 Hz。
在给定控制摩擦轮的电机转速恒定的情况下,弹丸的发射速度将稳定在一个区间内,在理想情况下弹丸会集中击打目标靶心。在实际射击中,弹丸的发射速度受多种因素作用,会产生一定的波动,进而影响弹丸最终的落点,影响弹丸发射的稳定性。当弹丸的发射速度与理想发射速度之间的速度偏差过大时,会出现脱靶现象,即为无效击打[18]。在本文的设计指标中,对于尺寸为100 mm×100 mm的静止目标,弹丸脱靶率为5%~10%时,视为功能下降;脱靶率大于10%时,视为不可工作。
上述为机器人发射系统的设计指标,各项指标参数如表4所示。

表4 发射系统设计指标
3 影响因素试验设计与分析
3.1 摩擦轮半径对弹丸发射的影响及参数筛选
设定单边最大过盈量为2 mm,摩擦轮材料使用弹性模量为10 MPa的聚氨酯TPU材料,假定摩擦轮线速度足够大,弹丸以初速度为0的情况下进入摩擦轮之间,探究摩擦轮半径的大小对弹丸发射过程加速度以及最终发射速度的影响。
分别取摩擦轮半径为15、20、25、30、35、40 mm进行测试,得到不同摩擦轮半径下弹丸位移距离和最大处速度变化模型和摩擦轮最大应力和速度-应力变化模型,分别如图5、图6所示。
图5 不同摩擦轮半径下的弹丸位移距离和最大初速度

图6 不同摩擦轮半径下的摩擦轮最大应力和速度-应力比值
由图5可知,弹丸的最终发射速度,即发射最大初速度,随着摩擦轮半径的增大而增加,由图6可知,接触最大应力随着摩擦轮半径的增大而增大,但在实际操作中,摩擦轮的半径大小受到很多因素的限制,包括电机功率、包胶材料等,综上考虑,选用摩擦轮半径为30 mm。
3.2 摩擦轮材料对弹丸发射的影响及参数筛选
设定单边最大过盈量为2 mm,摩擦轮半径为30 mm,假定摩擦轮线速度足够大,弹丸以初速度为零的情况下进入摩擦轮之间,探究不同弹性模量的摩擦轮包胶材料对弹丸发射过程加速度以及最终发射速度的影响。
取摩擦轮包胶材料为弹性模量为7.8 MPa的橡胶以及弹性模量分别为10、20、30、40、50 MPa进行实验测试,分别得到不同弹性模量下的摩擦轮最大压力和最大初速度变化模型和摩擦轮最大应力和速度-应力比值变化模型,分别如图7、图8所示。
图7 不同弹性模量下的摩擦轮最大压力和最大初速度
图8 不同弹性模量下的摩擦轮最大应力和速度-应力比值
由图7可知,弹丸速度随着摩擦轮材料的弹性模量的增大而增加。由图8可知,在单边最大过盈量保持不变的情况下,摩擦轮弹性模量越大,弹丸和摩擦轮在变形量恒定的情况下受到的弹性挤压力也就越大,弹丸所受到的合力以及加速度也会增大。虽然弹丸的运动位移并未发生改变,但弹丸发射的最大速度却因加速度的增大而增大,即弹丸的最终发射速度和摩擦轮的弹性模量大小是正相关。另外,在其他参数不变的情况下,最大接触应力的大小和摩擦轮的弹性模量正相关。同时,在满足设计指标发射速度的前提下,应尽可能的选择小的摩擦轮包胶材料硬度,以保证最大接触应力处于一个较低水平。在最大发射初速度为30 m/s的指标下,选定摩擦轮包胶材料硬度为60±5 A。
3.3 单边最大过盈量对弹丸发射的影响及参数筛选
设定摩擦轮的半径为30 mm,弹性模量为 10 MPa,假定摩擦轮线速度足够大,弹丸以初速度为0的情况下进入摩擦轮之间,分别取单边最大过盈量为0.5、1、1.5、2、2.5、3 mm,分别得到不同单边最大过盈量下的弹丸位移距离和最大初速度变化模型和摩擦轮最大应力和速度-应力比值变化模型,分别如图9、图10所示。
由图9可知,在其他条件相同的情况下,单边最大过盈量越大,相同摩擦轮半径情况下摩擦轮间距就越小,弹丸从初始位置到发射位置的位移越大,弹丸受到的最大挤压力越大,也就导致了弹丸所受到的合力以及加速度越大,在加速度和位移同时增大的情况下,弹丸最终的发射速度也随之增大。即弹丸最终发射速度和单边最大过盈量的大小呈正相关。同时,在其他参数不变的情况下,随着弹丸和摩擦轮接触的单边最大过盈量的增大,最大接触应力也随之增大,即最大接触应力与单边最大过盈量正相关,如图10所示。
图9 不同单边最大过盈量下弹丸位移距离和最大初速度
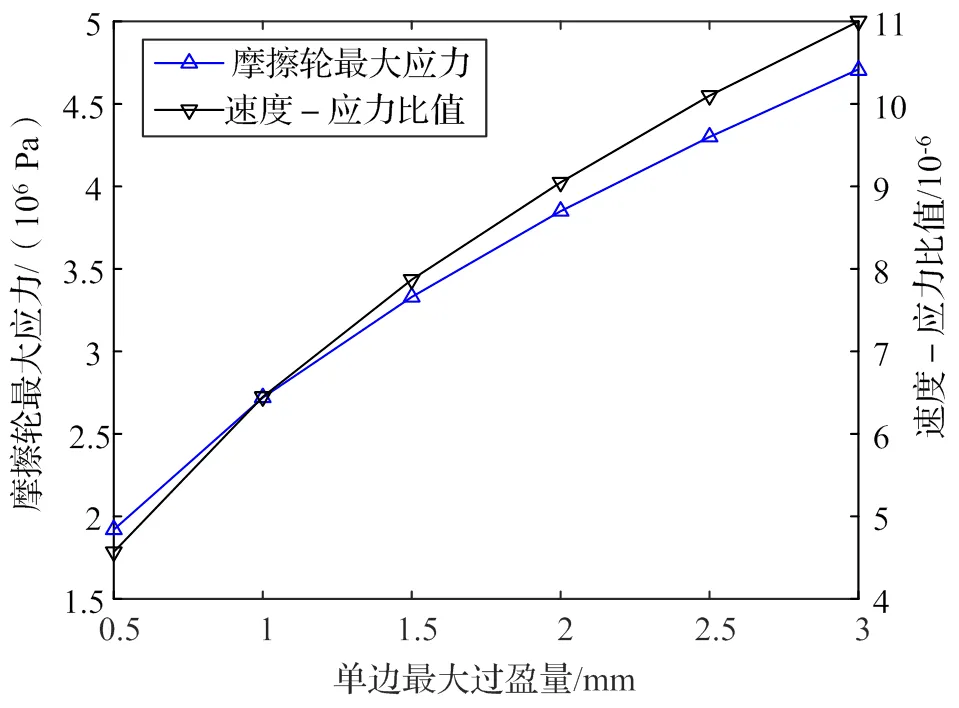
图10 不同单边最大过盈量下摩擦轮最大应力和速度-应力比值
综上,在满足设计指标发射速度的前提下,应尽可能选择较小单边最大过盈量,保证最大接触应力处于一个较低水平。在设计指标发射初速度30 m/s的指标下,选定单边最大过盈量的参数范围为2.1±0.2 mm。
3.4 基于Bayes方差估计的影响因素参数选择
依据所选定的参数组合,设计弹丸发射机构平台试验,调整摩擦轮转速为6900 r/min,控制发射机构以20 Hz频率连续发射200发弹丸,记录弹丸的发射速度,并计算出平均速度和速度方差,分析弹丸发射的准确性和稳定性。
分别选取摩擦轮硬度为55A、60A、65A进行实验,实验数据如表5所示。
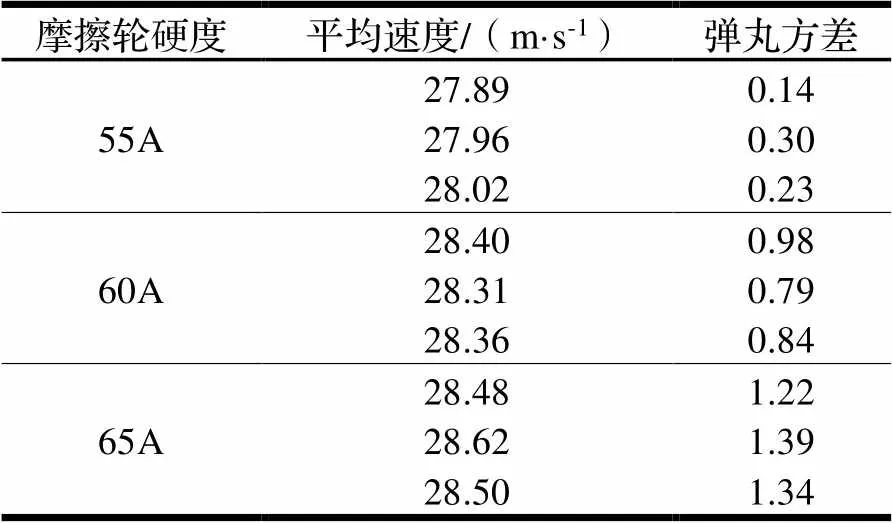
表5 不同摩擦轮硬度的实验数据

表6 不同单边最大过盈量的实验数据
分别选取摩擦轮不同单边过盈量为1.9 mm、2.1 mm、2.3 mm进行实验,实验数据如表6所示。
设弹丸发射服从正态分布,即~(,2),其中为平均速度,m/s;2为速度方差;参数是一个未知量。根据Bayes方差估计方法,样本数据的条件密度函数为:

选取先验分布为IGamma分布,记为~(,):

分布函数的数学期望为:方差分别为:
分布函数的方差为:

联合式(9)和式(10)可得:
后验分布中,设测得的弹丸发射速度数据分别为1,2, ...,x,由贝叶斯定理可得出:
联合式(11)和式(12)可得:


以测量数据的矩估计作为先验分布,基于上述Bayes小子样方差估计方法[19],通过测量值对矩估计进行测量更新,对表5和表6的不同条件下测试得到的方差进行估计,如表7所示。
针从实验数据可以得出,在摩擦轮硬度为55A时,估计方差相对较小,与硬度为60A和65A的条件相比发射最为稳定;在单边最大过盈量为2.3 mm时,弹丸发射速度估计方差较小,发射相对稳定。故论文中,发射机构优化参数选择摩擦轮硬度为55A,单位最大过盈量为2.3 mm。
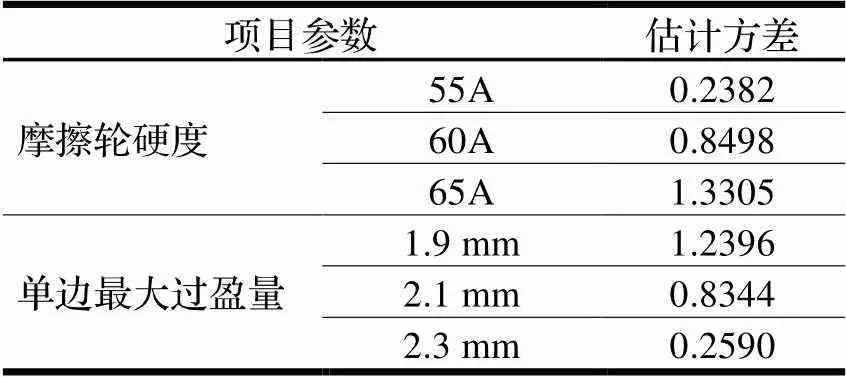
表7 方差估计值
通过上述讨论,关于弹丸发射的三个优化可控因素选择如表8所示。
表8 弹丸发射优化可控因素
4 基于方差分析的影响因素验证
4.1 方差分析法
作为一种实用、有效的数据分析方法,方差分析法能够检测出不同影响因素对实验所得结果的影响显著性,可以节约仿真工作时间并提高实验效率[20]。对因素的个水平进行试验测试,每个水平进行组重复试验,可以得到×组数据结果,假设每组数据结果相互独立,通过计算可以得到样本总均值、离差平方和组内均值以及组内平方和,而不同水平下可以计算出组间平方和,离差平方和的分解为:

式中:T为离差平方和;A为组间平方和;E为组内平方和。
在求出平方和及其自由度之后,对数据进行方差分析,令:
4.2 基于方差分析的弹丸发射影响因素显著性分析
在上述实验数据基础上,以弹丸发射速度和速度方差为指标,对试验结果进行方差分析,分析结果如表9所示,其中,离差平方和的自由度为8,组内平方和的自由度为6。
在检验水平=0.1的情况下,由分布上测分位数表可知的临界值为2.98,即=2.98,因此可判断,摩擦轮的材料和接触单边最大过盈量对弹丸发射的速度及稳定性有显著影响,验证了理论分析结果。

表9 摩擦轮材料和间距的方差分析结果
4.3 不同试验条件下的可测试性分析
试验设计的指标为,弹丸击打在100 mm×100 mm范围内视为有效击打,按照实验要求,假设给定摩擦轮转速,在加入重力补偿之后,理想情况下弹丸可以击打至靶纸中心,如果弹丸速度波动超过一定阈值,将会发生脱靶现象,超出波动阈值的弹丸数量超过5%时视为功能下降,超过10%时视为不可工作。弹丸速度波动对垂直偏移误差的数学模型如下:

式中:为弹丸距离靶纸距离,m;为弹道竖直偏移误差,m;为重力加速度,m/s2;为速度波动,m/s,在本设计指标下的阈值为50。
由此得到不同射击距离下的速度波动阈值,如表10所示。

表10 不同发射速度与不同发射距离下的速度波动阈值
由表10可知,弹丸初速度越大,发射距离越短,可接受的速度波动阈值就越大。
通过实验证明弹丸发射服从正态分布~(,2),转换成标准正态分布,即(-)/~(0, 1)为了实现命中静止目标95%以上的标准,由标准正态分布可知[21]:


测试并验证设计参数与设计标准的符合度。设定摩擦轮转速为5700 r/min,将发射机构固定在平台上,使用白纸和复写纸组成靶纸,分别将目标靶纸安置于5 m、6.5 m、8 m处,以20 Hz射频发射200发弹丸,统计弹丸的发射速度及落点,得到实验结果如表11所示。可知,速度波动阈值与测试方差的关系为Δ>2,即满足设计标准,在100 mm×100 mm的靶纸上,有超过95%的弹丸命中靶纸,此时发射机构状态评估为可工作。
进一步考虑不同劣化状态的评估标准,对可能发生的故障进行试验设计,设置的参数对应磨损严重的摩擦轮和老旧的电机。设定该情况下摩擦轮转速为5700 r,将靶纸设置在8 m处,以20 Hz的射频发射200发弹丸,记录弹丸的落点以及发射情况,并将发射速度代入式(19)中得出速度波动阈值,得到实验结果如表12所示。

表11 不同射击距离下弹丸发射数据

表12 不同工况条件下弹丸发射数据
由表12可知,磨损摩擦轮速度波动阈值和方差的关系为Δ<1.65,即超过10%的弹丸无法命中规定的靶纸范围,状态评估为不可工作,老旧电机的速度波动阈值和方差的关系为:1.65<Δ<2,即存在5%~10%的弹丸无法命中规定靶纸范围,状态评估为性能下降。完整试验设计与验证过程如图11所示。
由图11所示路线得到的测试结果与设计指标对比,如表13所示。
由表13可知,本文开展的弹丸发射系统的测试性能均达到了设计指标,其中射击频率这一指标,可以由控制拨弹机构的电机进行稳定输出,满足了最大射频与弹丸发射稳定性指标。
5 结论
(1)通过弹丸加速度模型筛选出影响弹丸发射的三个可控因素是摩擦轮的半径、摩擦轮的材料和单边最大过盈量。
(2)通过方差分析法检验,验证了摩擦轮的材料和单边最大过盈量对弹丸发射具有显著性影响。
(3)对完成参数优化后的发射机构进行可测试性分析结果显示,在100 mm×100 mm的靶纸上,超过95%的弹丸命中率,符合最初试验设计指标,达到了提高射击机器人发射稳定性与准确性的目的。
图11 发射机构测试性能影响因素分析技术路线

图12 不同试验条件下的可测试性试验结果
[1]肖华,黄河,谢模焱. 全方位移动式网球机器人的研究与设计[J]. 机电工程,2015,32(4):509-515.
[2]周琼,唐火红,骆敏舟,等. 悬吊式机器人消防炮力学建模与稳定性分析[J]. 机械研究与应用,2015,28(2):54-56,62.
[3]黄思姬. 地面武装机器人机械系统设计与实验研究[D]. 南京:南京理工大学,2011.
[4]张相炎. 武器发射系统设计概论[M]. 北京:国防工业出版社,2014.
[5]叶邦松,刘超峰,方彤,等. 一种微型无人机机载气动连续发射装置[J]. 智能计算机与应用,2021,11(6):201-204.
[6]郭伟国,鬲钰焯,苏静. 用于分离式Hopkinson杆装置的一种先进气动发射机构[J]. 机械科学与技术,2010,29(12):1739-1743,1748.
[7]马伟明,鲁军勇,李湘平. 电磁发射超高速一体化弹丸[J]. 国防科技大学学报,2019,41(4):1-10.
[8]A. Bolonkin. Non-rocket space launch and flight[M]. Amsterdam:Elsevier,2010.
[9]徐磊,郭三学. 非致命武器的人机工程学分析[J]. 机械科学与技术,2003,23(S2):3-5.
[10]吴星超. 某电动源发射系统关键问题研究[D]. 南京:南京理工大学,2014.
[11]周克栋,吴星超,赫雷,等. 电动源发射过程弹丸运动状态分析研究[J]. 火炮发射与控制学报,2014,35(2):1-6.
[12]方弄玉,邹心遥,杨娜,等. 炮弹发射游戏机器人设计与实现[J]. 自动化与仪器仪表,2017,37(5):211-213.
[13]王培源,朱嘉程,杨金磊,等. 基于电动摩擦发射源机构的智能安防无人机关键技术研究[J]. 技术与市场,2019,26(11):28-29.
[14]X. Li,J. Lu,J. Feng,et al. Modeling for the Calculation of Interior Ballistic Velocity of Electromagnetic Rail Launch Projectile[J]. IEEE Transactions on Plasma Science,2018,47(1):807-813.
[15]邓辉咏,马吉胜,刘海平. 履带式自行火炮发射动力学建模仿真研究[J]. 机械科学与技术,2012,31(4):543-546.
[16]S. Hao,L. Yongcheng,M. Xiaolin,et al. Development and Application of Multi-functional Intelligent Robot Motion Chassis[J]. Advances in Wireless Communications and Applications,2021,191(7):229-235.
[17]温诗铸,黄平. 摩擦学原理[M]. 北京:清华大学出版社,2002.
[18]程光显,张士峰. 导弹落点精度的鉴定方法——概率圆方法[J]. 国防科技大学学报,2001,23(5):13-16.
[19]马康. 基于Bayes小子样理论的舰炮弹丸落点散布方差估计[J]. 舰船电子工程,2014,34(6):120-124.
[20]吕栋雷,曹志耀,邓宝,等. 利用方差分析法进行模型验证[J]. 计算机仿真,2006,23(8):46-48.
[21]曹晋华,程侃. 可靠性数学引论[M].北京:高等教育出版社,2006.
Factors Influencing Testability of the Launch Mechanism for Shooting Robots Using DOE Method
XING Linqiao,HE Liping,SUO Haoliang,LIU Jing
( School of Mechanical and Electrical Engineering, University of Electronic Science and Technology of China,Chengdu 611731, China)
To overcome the problems of low accuracy of projectiles striking and large fluctuation in the current launching mechanism for shooting robots, a DOE-based method is proposed to study the friction wheel launching mechanism and to design and analyze the performance of the shooting robot’s launching mechanism. Firstly, after analyzing the kinematic relationship of the launching mechanism, the projectile launching acceleration model is established by using the Hertzian contact theory. Three main controllable factors are determined—the radius of the friction wheel, the material properties and the maximum unilateral interference. And then test impact factors are selected. Secondly, a test design is conducted for the three controllable factors and the impact model is provided to optimize the parameters of the influencing factors of the launching mechanism. Meanwhile, variance analysis is adopted to verify the significance of the influence of the friction wheel material and the maximum unilateral interference on the projectile launching. Finally, the testability analysis of the design parameters is carried out, and the performance of the projectile launching mechanism is validated under different test conditions. The experimental results show that the initial launch velocity of the projectile reaches 28 m/s and the probability of hitting a stationary target is 97%. It meets the requirements of projectile launching index and ensures the accuracy and stability of the shooting robot's launching.
robot launching mechanisms;testability;influencing factors;parameter selection;variance analysis
O212.6
A
10.3969/j.issn.1006-0316.2022.11.003
1006-0316 (2022) 11-0018-10
2022-04-21
国家自然科学基金重点项目(61833002);教育部产学合作协同育人项目(202101204003);四川省2018-2020年高等教育人才培养质量和教学改革项目(JG2018-224)
幸琳乔(1997-),男,江西宜春人,硕士研究生,主要研究方向为机器人信息融合与可靠性评估,E-mail:xing_linqiao@std.uestc.edu.cn。*通讯作者:何俐萍(1973-),女,四川德阳人,博士,教授,主要研究方向为智能机器人系统可靠性与安全性分析、寿命预测与健康评估、不确定性人工智能等,E-mail:lipinghe@uestc.edu.cn。
