增强现实辅助电磁导航下的内镜逆行胰胆管造影胆管插管定位技术模型研究
2022-01-28张大涯令狐恩强李明阳
张大涯,杨 硕,吴 浪,令狐恩强,李明阳
1 解放军总医院研究生院,北京 100853;2 解放军总医院第一医学中心 消化内科,北京 100853;3 北京理工大学 混合现实与新型显示工程技术研究中心,北京 100081
笔者早前研究描述了在3D 打印的胆道模型中,电磁导航系统可以精确地辅助内镜下逆行胰胆管造影术(endoscopic retrograde cholangiopancreatography,ERCP) 胆管插管[1]。但该模型实验中屏幕上的导航信息与手术场景是分离的。为了获取导航信息,术者要在屏幕与手术台投影之间不断地切换视野,这影响了手术的顺利进行。增强现实(augmented reality,AR)技术可以将计算机产生的虚拟物体融合于真实场景中,具有虚实融合、实时交互和辅助增强的特点[2]。当前,AR 已成为肝手术和内窥镜的导航辅助手段[3]。目前尚未见AR 辅助导航技术与ERCP 结合的研究。本研究应用AR 辅助电磁导航系统引导胆道模型ERCP 胆管插管,探讨其应用的可行性,为进一步动物实验和临床研究奠定基础。
资料与方法
1 资料来源 选取解放军总医院第一医学中心2021年6 月1例肝内外胆管扩张患者的影像学资料。患者女性,83 岁,诊断为胆总管结石,行ERCP 取石术,术后恢复顺利。本研究已通过解放军总医院第一医学中心伦理委员会审批(S2021-415-01)。患者及家属均签署相关知情同意书。
2 胆道CT 影像的三维重建 获取患者0.625 mm层厚的腹部CT 医学数字成像和通信标准格式数据。使用三维重建软件(北京精诊医疗科技有限公司,中国)对胆道行三维重建,获取标准三维图形文件(STL)。
3 制作胆道模型“靶目标” 根据STL 文件采用树脂材料打印1∶1.36 的胆道模型,在模型左后肝管分支嵌入一个标记物,即电磁定位精准导航的“靶目标”。
4 体模CT 图像的三维重建 将胆道模型固定在人体腹部体模中,并在体模基底和皮肤表面分别贴上2个配准标志物和10个标记物(图1),对体模进行CT 平扫,得到STL 文件。本实验的配准标志物中含有金属球,标记物为直径5.0 mm 的圆柱形模型,可满足导航定位需求。

图1 体模三维重建 A:胆管模型;B:腹部体模Fig.1 3D reconstruction of the phantom A:bile duct model;B:abdomen phantom
5 安装实验装置 包括电磁导航系统(Aurora,NDI 公司,加拿大)、ERCP 设备、模拟呼吸装置、手术导航系统、腹部体模和具有高性能数据处理能力的计算机(图2)。乳头括约肌切开刀(威尔逊-库克医学公司,美国)通道内置磁探头,磁探头尖端与乳头切开刀头端处于同一位置(图3)。

图2 导航实验设备组成Fig.2 Composition of navigation experiment equipment
6 注册配准 通过术前CT 图像获得体膜标志物的图像坐标,实验中再获取其磁场坐标,基于特征点配准算法完成配准,直到配准误差<1 mm,并记录电磁导航的注册配准误差[4]。
7 构建增强现实平台 通过标志靶版(图4)将虚拟胆管模型投影在腹部模型皮肤表面,然后分别获取真实皮肤靶点与虚拟投影靶点中心的坐标值,并分别记录皮肤表面每个虚拟靶点与真实靶点间的欧式距离,作为AR 融合误差。每组测定10个标记靶点,共测量10 组,记录各靶点平均融合误差,量化分析增强现实的精度。AR 平均融合误差<10 mm,则符合临床要求[5]。

图4 体模的AR 融合效果图,其中红色圆球为分割所得虚拟靶点Fig.4 AR fusion rendering of the phantom,in which the red sphere is the virtual target obtained by CT segmentation
8 体模实验 应用AR 辅助电磁导航软件可实时显示电磁追踪下乳头括约肌切开刀在胆道3D 打印模型中的位置。在定位跟踪下,行乳头括约肌切开刀胆管插管探查,并测量切开刀到达胆管模型靶点时图像空间中传感器与靶点之间的距离,即体模电磁导航精度误差。根据De Jong 等[6]的报道,在体模中加入运动装置后,在设定的最大呼吸浮动下进行乳头括约肌切开刀胆管插管。
9 分割ERCP 术中胆道影像 采集并分割ERCP患者在麻醉状态的左侧卧位和平卧位两个呼吸相胆管造影X 线下的动态序列影像。
结 果
1 体模注册配准误差 10 次测试,平均误差为(0.337±0.004) mm。见表1。
2 体模AR 融合误差 10 组实验,总平均值为(2.76±0.16) mm。见表1。
3 增强现实显示 乳头括约肌切开刀在进入肝总管分叉处、左肝管分支和右肝管分支前,可在CT 影像中被实时追踪导航,并精准进入目标胆管,同时增强现实显示效果良好。见图5。
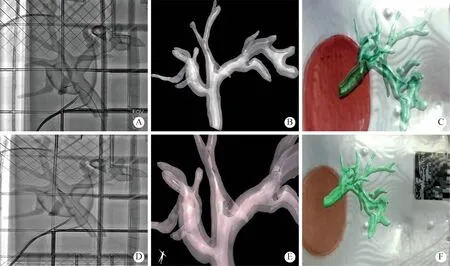
图5 电磁导航追踪下乳头括约肌切开刀在体模的探查图例A:切开刀进入胆道模型的右肝管;B:绿色标记为电磁导航系统显示磁探头位于右肝管;C:AR 界面上的红点显示磁探头位于右肝管;D:切开刀进入胆道模型的左后肝管属支,且到达目标靶点;E:绿色标记为电磁导航系统显示磁探头位于左后肝管属支,黄色标记表示目标靶点在三维图像的位置;F:AR 界面上的红点显示磁探头位于左后肝管属支Fig.5 Detection legend of the sphincterotomy in the phantom under electromagnetic navigation trackingA:Sphincterotomy enters the right hepatic duct of the biliary tract model;B:The green mark means that the electromagnetic navigation system is located in the right hepatic duct;C:The red dot on the AR interface shows that the magnetic probe is located in the right hepatic duct;D:Sphincterotomy enters the branch of the left posterior hepatic duct of the biliary tract model,and reaches the target point;E:The green mark indicates that the magnetic probe is located in the branch of the left posterior hepatic duct by electromagnetic navigation system,and the yellow mark indicates the target in the three-dimensional image;F:The red dot on the AR interface shows that the magnetic probe is located in the branch of the left posterior hepatic duct
4 体模电磁导航精度误差 10 次实验,平均值为(0.949±0.033) mm。见表1。
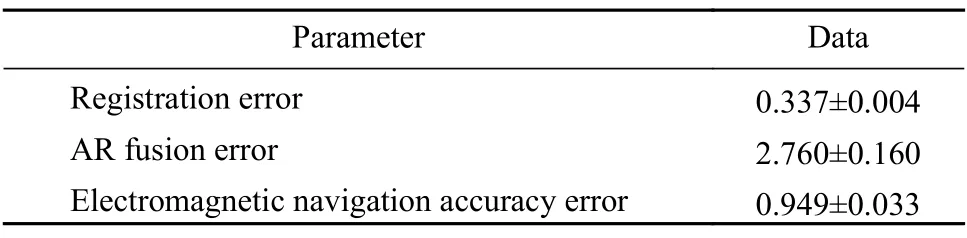
表1 体模电磁导航误差参数(mm)Tab.1 Electromagnetic navigation error parameters of the phantom (mm)
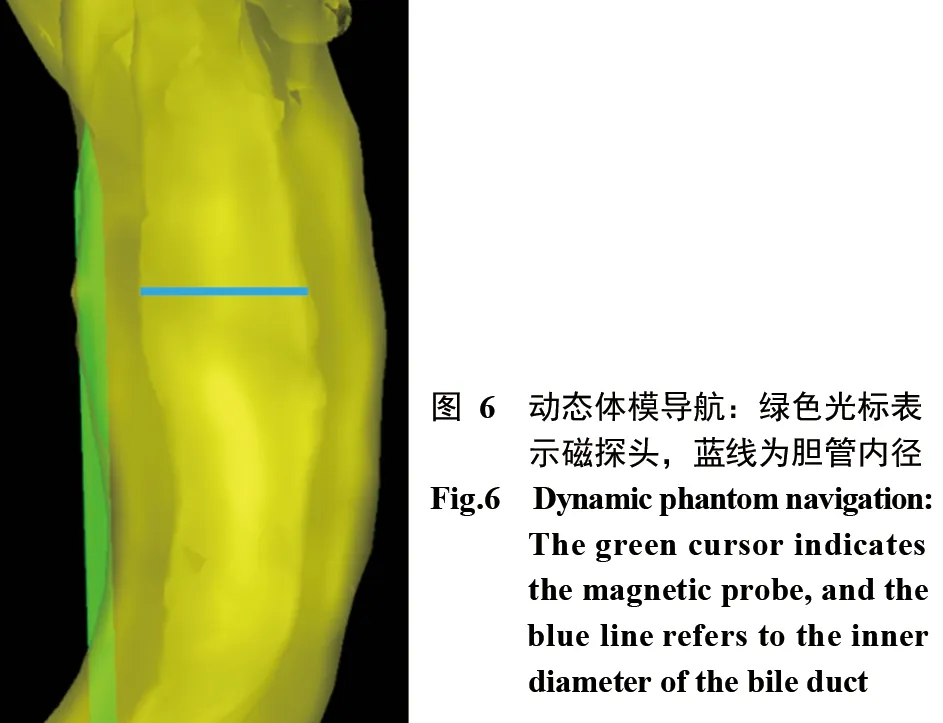
5 动态体模导航 在最大呼吸浮动下,胆管模型内的磁探头在导航显示上已在胆管内径外。见图6。
6 术中动态胆道影像分割 胆道位置和形态随患者呼吸脉搏和体位的变化而变化。
讨 论
在消化系统研究中,Tang 等[7]首次报道了有关AR 导航技术应用于胆道镜的研究,通过在胆道镜内部安装电磁传感器,跟踪其在3D 打印模型中的轨迹,基于AR 导航平台,在3D 打印模型上实现精准导航。我们的研究发现AR 辅助电磁导航系统定位与ERCP 乳头切开刀进入的胆道打印模型中胆道属支基本匹配,其导航精度误差为(0.9490±0.0331) mm。在临床实际应用中,<2 mm 的导航精度是非常理想的[4]。
目前导航技术多用于神经外科和骨科[8-9]。主要是因为这两个科室疾病可以参照手术区域的骨性结构较多,没有呼吸运动干扰、软组织变形等影响,配准手术路线相对容易,可以实现较为精准的导航精度。但腹部区域的AR 手术导航系统易受运动、呼吸的影响,这使导航注册过程变得更困难[10]。我们的模型是静态模型,而真实胆道会受自身呼吸和脉搏影响而相对移动[11]。因此,AR 辅助电磁导航引导ERCP 胆管插管应用于临床,其最大的难度是配准精度。有研究为了减少临床病例呼吸运动和体位变化对导航肾穿刺的影响,采用与术中同一体位拍CT 及麻醉状态下短时间控制呼吸的办法[12-13]。笔者认为此种方法不适合用于ERCP 手术。大量采集ERCP 患者术前CT 和相应的术中胆道显影X 线下1个呼吸相位的动态序列,进一步分割能解决术前和术中真实胆道与呼吸脉搏和体位相关的注册影响的技术方面难题。
ERCP 乳头括约肌切开刀进入人体胆管时可能迷失方向。应用支气管镜电磁导航程序可使真实内镜所见与虚拟内镜画面进行匹配,进而校正内镜位置[14]。有研究发现一种基于单目内窥镜的增强现实复杂先心病畸形病灶定位方法,有精准的增强现实效果[15]。这种通过内窥镜进行虚实配准的方法类似于一种自动图像识别或多点识别技术[16]。未来我们也将尝试选用ERCP 下胆道显影实时画面与虚拟胆道画面进行二次配准。
综上,本研究将AR 辅助电磁导航系统引入ERCP 胆管插管,在基于胆道3D 打印模型的试验中可达到精确的导航效果。虽然应用于临床仍需解决一些技术问题,但笔者认为这些技术难题通过研究终将被解决,该项导航技术一定有临床应用前景。