管道机器人清淤装置振动稳定性研究
2022-01-28罗继曼郭松涛刘思远
罗继曼,郭松涛,刘思远
(沈阳建筑大学机械工程学院,辽宁 沈阳 110168)
1 引言
振动与冲击是清淤机械结构在实现其自身功能的条件下无法避免的现象,也是机械发生故障的两个主要因素[1]。扇形盘是管道机器人清淤装置的核心零件,在旋转清淤过程中,扇形盘的滑块、弹簧、滑道与螺塞组成的清淤装置自适应系统,在工作中扇形盘受到重力、变化的弹簧力、惯性力、碰撞力等多重力叠加的作用,所以需要对该清淤装置的自适应系统进行稳定性和可靠性的研究。
清淤装置在清淤时,其旋转预应力使得扇形盘与弹簧的自适应系统产生无规则的振动和冲击,这将直接影响清淤装置的稳定性和可靠性。文献[2]提出了一种冲击载荷下,弹簧质量系统瞬态响应的近似算法,对机械系统的静强度可靠性设计有一定的参考价值;文献[3]探讨复杂结构在离心振动复合环境下的动力学行为,得到了系统复模态运动的表征,明确了系统特征频率与旋转系统的转速有关;旋转时自适应系统存在弹簧斜支撑状态,文献[4]研究了斜支承弹簧非线性减振系统的固有振动,验证了斜支承弹簧系统的固有频率总是小于弹簧垂直支承时线性系统的固有频率,文献[5]进行了两端并圈多股弹簧的冲击响应研究,表明弹簧系统具有冲击载荷时,有必要进行冲击响应分析,以合理选择弹簧刚度。以上研究对清淤装置自适应系统的研究具有理论指导意义。
这里对清淤装置在旋转条件下对其自适应机构系统进行基于弹簧预压缩量和预压力的振动动力学分析,从滑块对螺塞的冲击、滑块对弹簧的冲击和系统振动两方面进行分析,为选取转速和弹簧型号以及更好的提高系统工作稳定性提供理论支撑。
2 管道机器人及清淤装置
2.1 模型及工作原理
管道机器人模型,如图1所示。由推进系统1和清淤装置2组成,推进系统为整机提供前进动力。
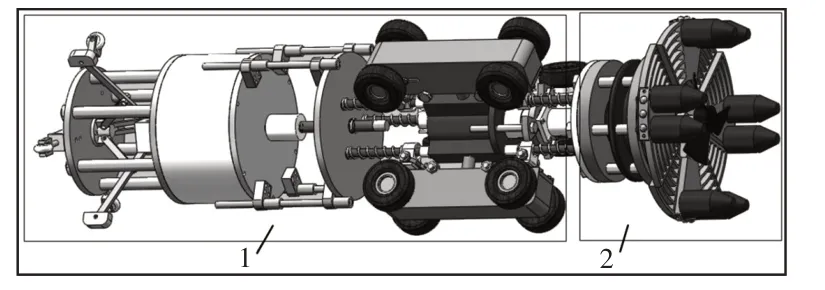
图1 管道机器人模型Fig.1 Pipeline Robot Model
在推进系统和主轴旋转时实现刮削—搅拌—过滤—推进—自流冲刷的五位一体清淤动作。清淤装置剖视图,如图2所示。该自适应清淤装置具有过载保护和越障的能力,在旋转时扇形盘(滑块)、弹簧、基盘(滑道)会产生复杂的振动和冲击现象。
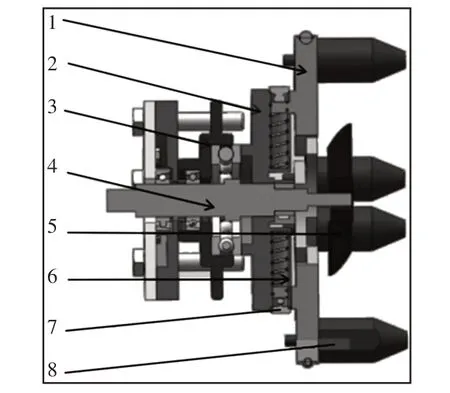
图2 清淤装置剖视图Fig.2 Cutaway View of the Dredging Device
2.2 建立自适应系统振动动力学模型
在清淤装置进行旋转刮削和搅拌工作时,将该装置动力简图简化,如图3所示。刮刀与扇形盘的质量集中在扇形盘的滑块上,其自身受到重力G和弹簧力F1,并在旋转时产生未知的惯性力F2(由于弹簧作用加速度ɑ变化)和滑块对弹簧的未知冲击力F3(因滑块与螺塞的冲击力产生)。忽略滑块和弹簧预滑道内壁的摩擦力,建立自适应系统振动动力学方程。
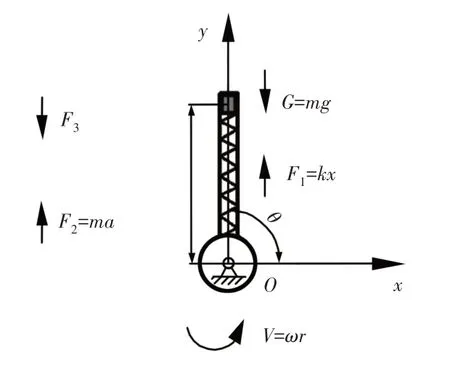
图3 振动动力学简图Fig.3 Vibration Dynamics Diagram

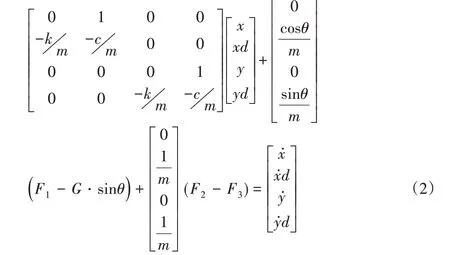
式中:m—扇形盘滑块的质量;c—弹性系统阻尼,c=0;k—弹簧刚度系数;F1—弹簧力(弹簧预压力),始终沿着滑道指向背离圆心方向;G—质点重力矢量,始终指向y轴负方向;F2—质点惯性力,F2=mω2r,始终沿着滑道指向背离圆心方向;F3—滑块对螺塞的冲击力;θ—设质心为A,则θ=∠AOx;200mm≤x≤250mm,200mm≤y≤250mm。取x和xd=为线性系统的状态变量,可将该系统的振动动力学方程转换为线性系统方程:
3 自适应系统冲击分析
通过对污泥的流变特性进行分析,确定清淤搅拌转速范围为(20~100)r/min时污泥的黏度趋向于极限黏度[6]。因此需对清淤盘的极限转速为20r/min和100r/min进行分析。在旋转状态下,自适应系统的冲击分析包括两个方面:(1)滑块对弹簧的冲击,表现为弹簧的受力和变形;(2)滑块对螺塞的冲击,表现为两者的碰撞力。
将简化模型导入到ADAMS中,为研究不同刚度系数下的弹簧产生的冲击,进行相应设置,如表1所示。

表1 振动动力学仿真设置Tab.1 Vibration Dynamics Simulation Settings
3.1 基于弹簧预压缩量的冲击分析
螺塞旋进量为10mm,设定弹簧的预压缩量为10mm,质选取密度小强度高的铝合金材质,扇形盘与刮刀的质量为3.5kg,因此为确保自适应系统的稳定性需满足f=k·Δx≥mg,其中k为弹簧刚度系数;Δx为弹簧预压缩量。
3.1.1V=20r·min-1时仿真分析
为得到准确结果,设置仿真时间为5s,仿真步数为500,进行仿真得到结果,如图4所示。图4(a)~图4(b)中k=3.5,弹簧预压力35N。图4(c)~图4(d)中k=7,弹簧预压力70N。图4(e)~图4(f)中k=35,弹簧预压力350N。
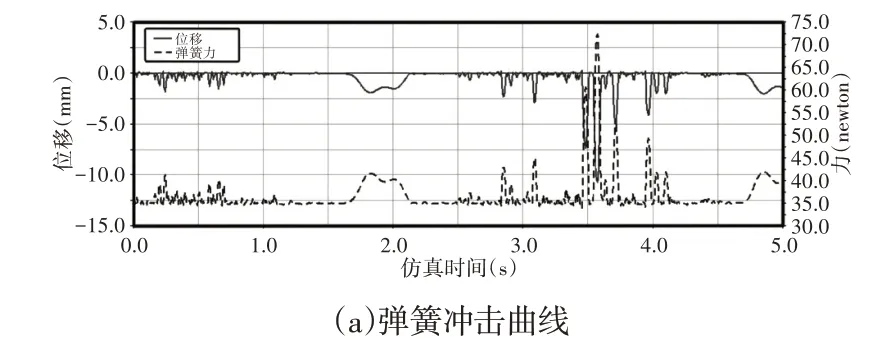
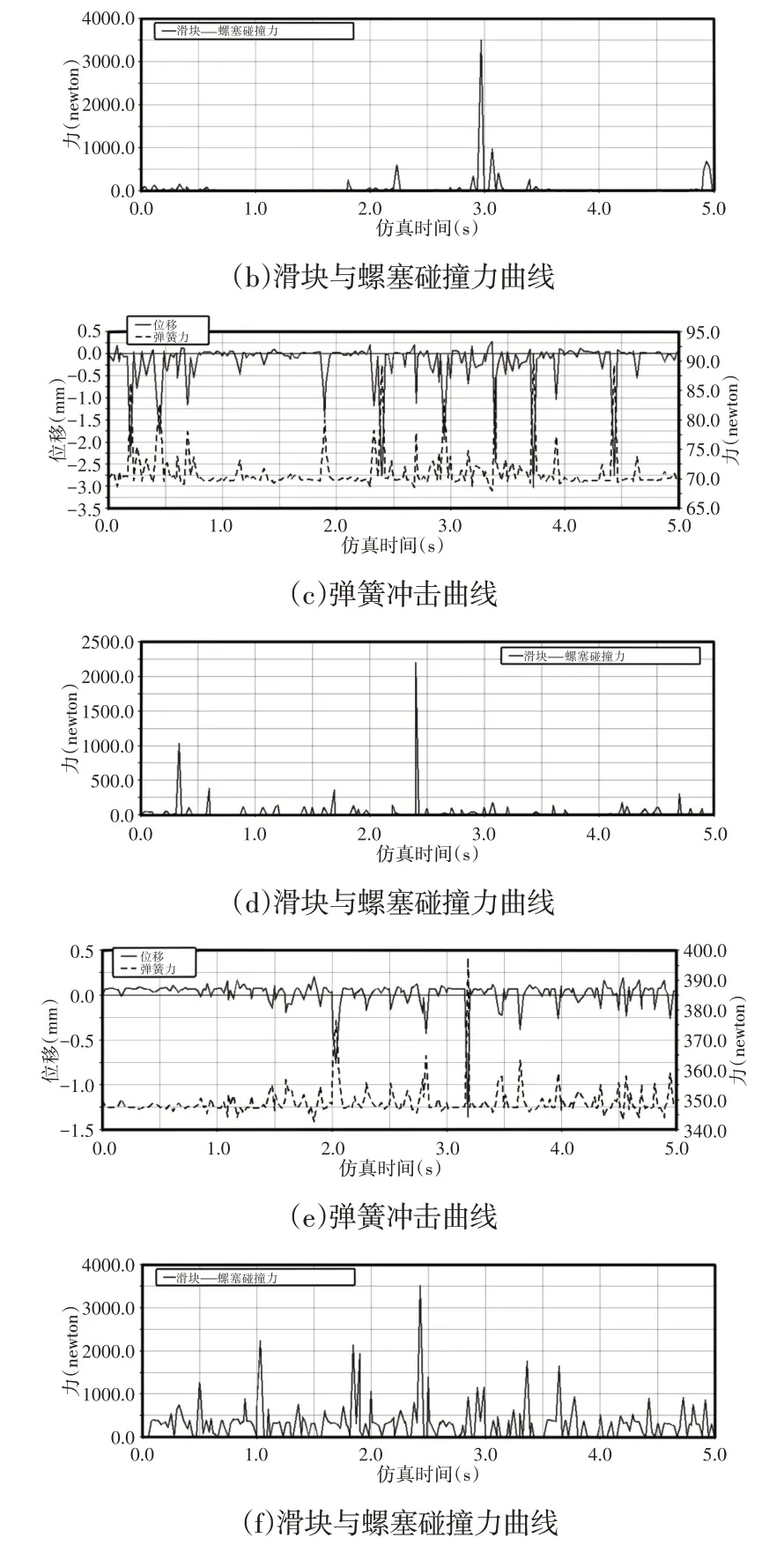
图4 低转速下冲击曲线Fig.4 Impact Curve at Low Speed
3.1.2V=100r/min时仿真分析
仿真设置时间与步数同上,得到最高转速下冲击曲线,如图5所示。图5(a)~图5(b)中k=3.5,弹簧预压力35N。图5(c)~图5(d)中k=7,弹簧预压力70N。图5(e)~图5(f)中k=35,弹簧预压力350N。
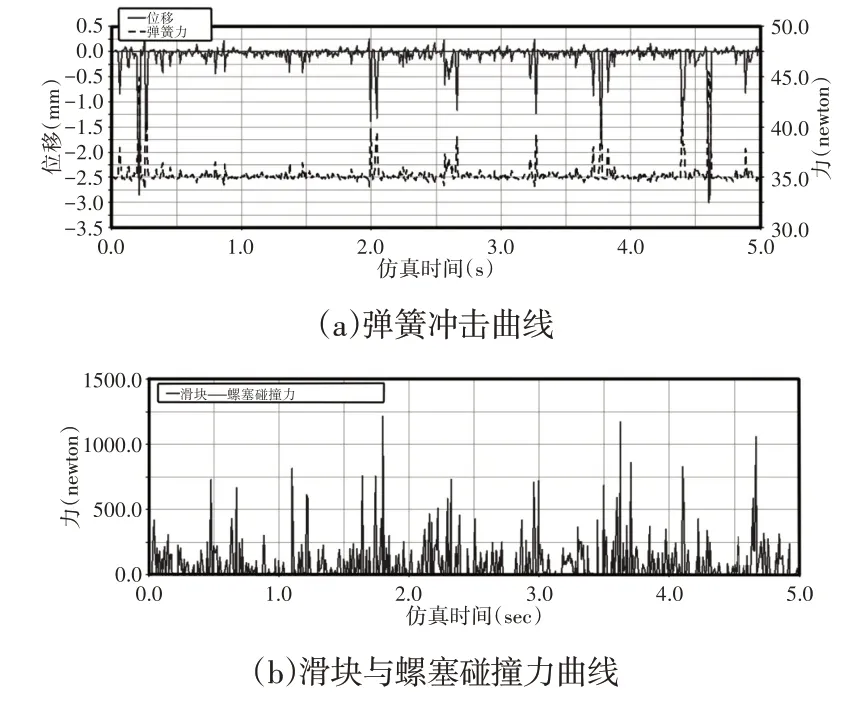

图5 高转速下冲击曲线Fig.5 Impact Curve at High Speed
仿真结果数据分析,如表2所示。数据均为仿真最大值。
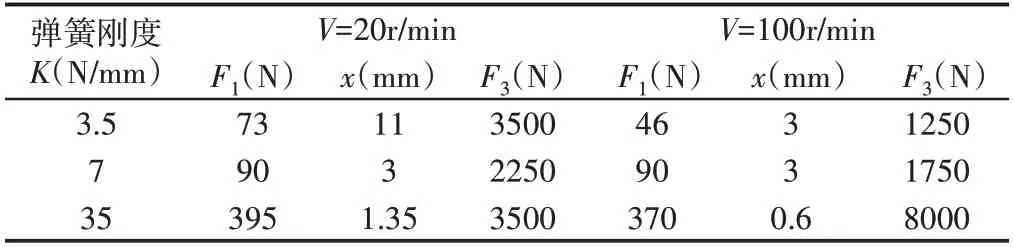
表2 冲击仿真结果Tab.2 Impact Simulation Results
分析结果表明:
(1)低转速时,弹簧刚度越大冲击变形越小,滑块对螺塞冲击力变化不大;
(2)高转速时,弹簧刚度越大冲击变形越小,滑块对螺塞冲击力越大;
(3)刚度系数较低时,转速越高冲击力越小;
(4)刚度系数较大时,转速越低冲击力越小。
3.2 基于弹簧预压力的冲击分析
根据上节分析结果,确定在高转速、低刚度的条件下,引入冲击系数,对自适应系统进行基于弹簧预压力大小的冲击分析,仿真设置,如表3所示。

表3 振动动力学仿真设置Tab.3 Vibration Dynamics Simulation Settings
仿真时间设置为5s,仿真步数为500,得到不同预压力下的冲击曲线,如图6所示。图6(a)~图6(b)中f=10N;图6(c)~图6(d)中f=100N;图6(e)~图6(f)中f=1000N。
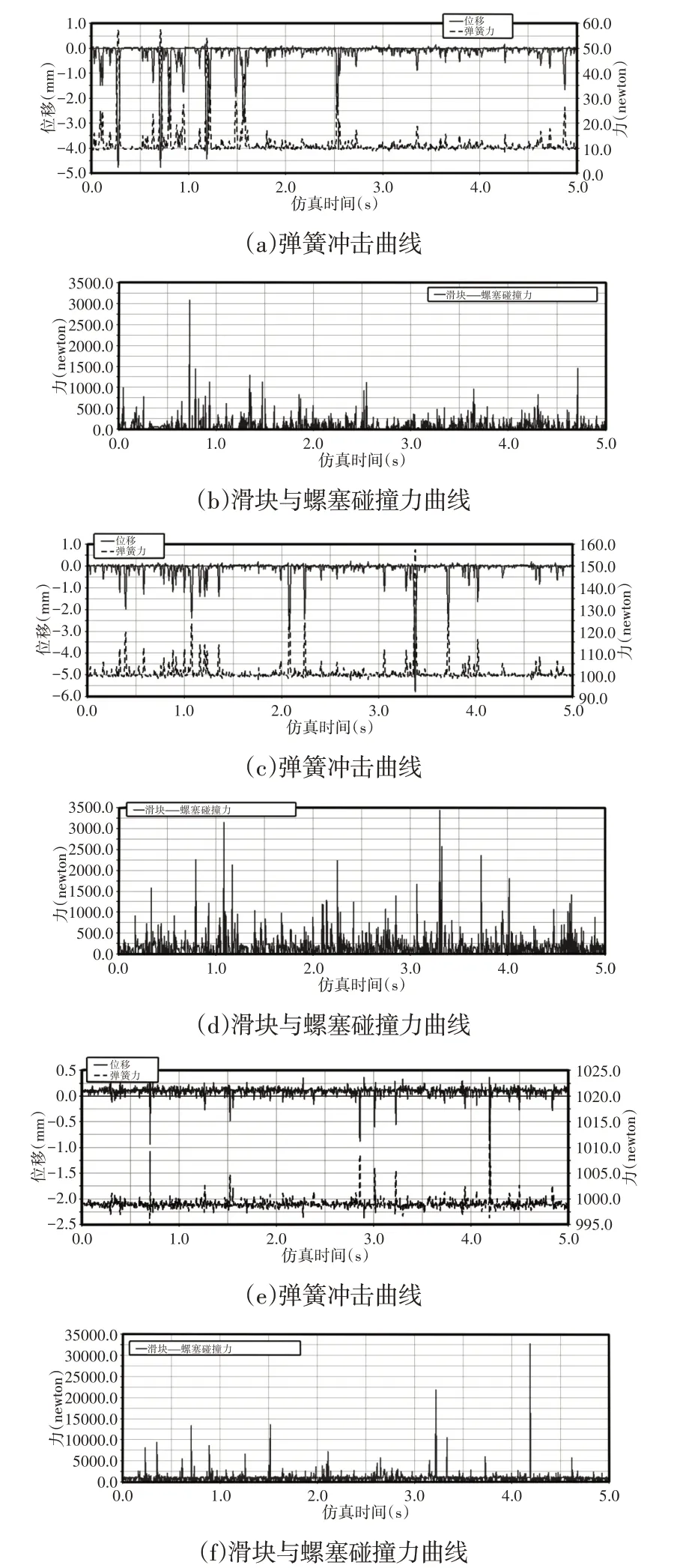
图6 不同预压力的冲击曲线Fig.6 Impact Curves of Different Pre-Pressures
仿真结果数据分析,如表4所示。其中弹性冲击系数k1=(F1-f)/f,刚性冲击系数K2=(F3-f)/f,自适应系统冲击系数k3=F3/F1。
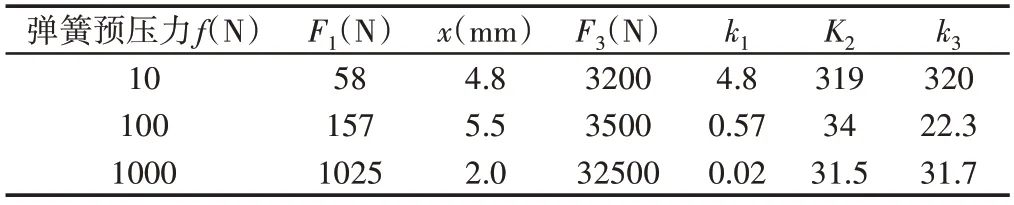
表4 冲击仿真结果Tab.4 Impact Simulation Results
分析结果表明:
(1)在弹簧无预压力与预压力为100N时,滑块对弹簧的弹性冲击、滑块对螺塞的刚性冲击力接近;但是当f=100N时的弹性和刚性冲击系数远小于f=0N时的冲击系数。
(2)在f=100N与f=1000N时,刚性冲击系数接近,弹性冲击系数随弹簧预压力的增大明显减小;但是弹簧预压力为1000N时,产生的滑块对螺塞的冲击力过大,无法保证系统的稳定性。
(3)弹簧预压力不同对弹簧冲击时发生的位移影响并不明显。
(4)自适应系统的冲击系数大小关系为k3/f=10>k3/f=1000>k3/f=100,说明当弹簧预压力f=100N时系统更稳定。
(5)弹性冲击系数均远小于刚性冲击系数。
3.3 自适应系统刚性冲击优化分析
根据表2、表4可知,扇形盘滑块与螺塞的刚性冲击力均过大,根据3.2节的分析结果(5)表明,在系统设计时可将刚性冲击转化为弹性冲击,可极大的降低系统冲击系数,降低冲击力。在扇形盘滑块与螺塞冲击的界面处添加一块橡胶材质的柔性缓冲元件(厚10mm,杨氏模量0.078GPa,泊松比0.49,密度1g/cm3),并进行冲击仿真分析,设置同3.2节,得到滑块与螺塞的冲击力曲线,如图7所示。
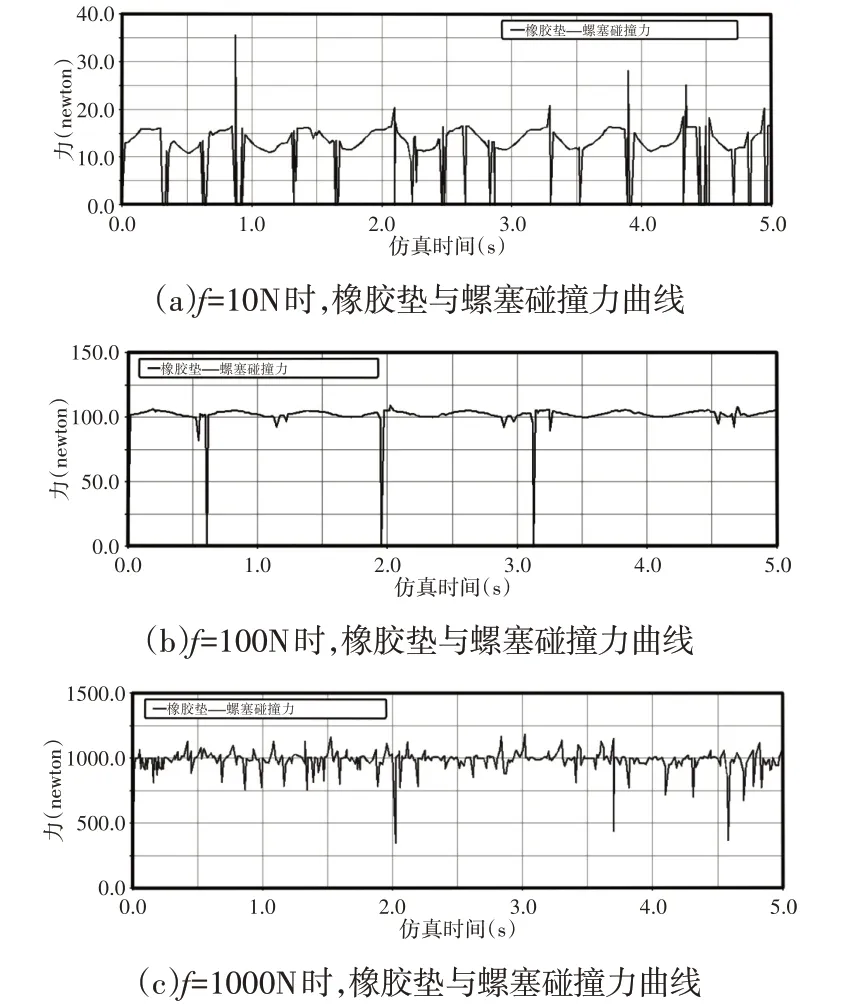
图7 加入橡胶垫后的碰撞曲线Fig.7 Collision Curve after Adding Rubber Mat
仿真结果分析:
(1)f=10N时,螺塞与橡胶的碰撞力大于10N,均在35N内。
(2)f=100N和f=1000N时,碰撞力均围绕f上下波动,并以小于f为主。
(3)橡胶垫将冲击能量缓冲消化,对系统运行的稳定性具有重要其意义。
3.4 系统振动分析
由于碰撞的存在,自适应系统的振动现象无法避免,设置转速100r/min,弹簧刚度为10N/mm,预压力为10N,分别在刚性接触和柔性接触情况下,对该系统进行振动动力学仿真计算,得到自适应系统振动曲线,如图8、图9所示。
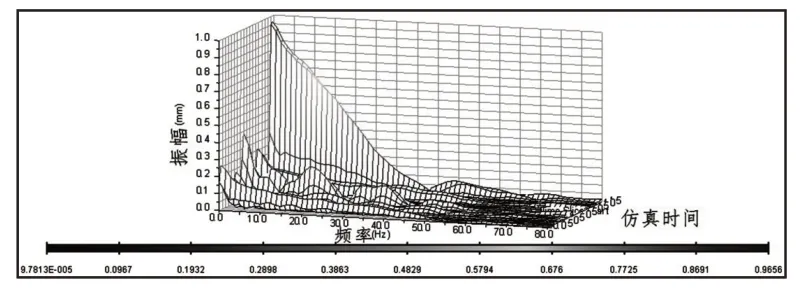
图8 刚性接触时系统振动曲线Fig.8 System Vibration Curve During Rigid Contact
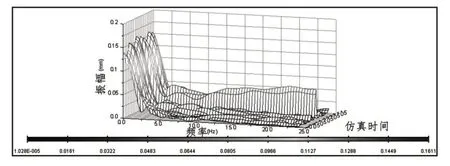
图9 柔性接触时系统振动曲线Fig.9 System Vibration Curve During Flexible Contact
分析结果表明:(1)刚性接触时,最大振幅为0.97mm,振动频率达到80Hz。(2)柔性接触时,最大振幅为0.16mm,振动频率达到25Hz。(3)相对于刚性接触,柔性接触时系统振动稳定性能更优。
4 结论
对清淤装置的自适应系统进行了旋转条件下的振动动力学研究得到如下结论:(1)为提高系统可靠性,比较滑块对弹簧冲击和滑块对螺塞的冲击,在低转速时,弹簧刚度应选取较大者为宜;在高转速时,应选取刚度系数较小者为宜。(2)为提高系统稳定性,应使清淤装置在较高转速下运行,弹簧预压力应选取(35~100)N之间为宜。(3)柔性元件吸收大量冲击能量,对清淤装置系统的冲击和振动均有良好的调节作用。