融合里程计信息的农业机器人定位与地图构建方法
2022-01-27李晨阳张振乾苗艳龙
李晨阳,彭 程,张振乾,苗艳龙,张 漫,李 寒
融合里程计信息的农业机器人定位与地图构建方法
李晨阳1,彭 程2,张振乾1,苗艳龙1,张 漫1,李 寒2※
(1. 中国农业大学现代精细农业系统集成研究教育部重点实验室,北京 100083;2. 中国农业大学农业农村部农业信息获取技术重点实验室,北京 100083)
目前主流的农业机器人以低成本、低帧率的激光雷达作为即时定位与地图构建(Simultaneous Localization and Mapping, SLAM)的主要传感器,存在运动畸变和误匹配的问题。该研究针对这一问题提出了融合里程计信息的Gmapping建图算法,利用高频率里程计信息为每一个激光束匹配到近似的机器人位姿,获取机器人当前位姿下更为精确的激光数据,以减少激光雷达运动畸变对地图构建产生的影响。利用机器人搭载扫描频率为5 Hz的RPLIDAR A1激光雷达在玉米田及香蕉园中进行了SLAM建图精度测试试验。试验结果表明,在长度为12 m左右的玉米田区域,Gmapping建图算法的平均绝对误差为0.06 m,该研究算法建图平均绝对误差为0.01 m,相比于Gmapping建图算法降低了0.05 m,建图精度为99.5%;在长度为24.43 m的香蕉园区域,Gmapping建图算法的平均绝对误差为0.46 m,该研究算法建图平均绝对误差为0.07 m,相比于Gmapping建图算法降低了0.39 m,建图精度为99.1%。该研究算法有效地降低了低帧率激光雷达运动畸变对Gmapping建图的影响,可以基本满足农业环境下的高精度环境建图需求。
机器人;传感器;建图;运动估计;信息融合
0 引 言
近年来,机器人技术快速发展。即时定位与地图构建(Simultaneous Localization and Mapping, SLAM)是机器人导航技术的关键技术之一,也是机器人自动导航的重要基础[1]。传感器技术的发展使得即时定位与地图构建技术在建图精度及鲁棒性上有了一定程度的提升。根据传感器的类型可以将SLAM分为视觉SLAM和激光SLAM两大类[2],其中视觉SLAM借助视觉传感器获取环境信息,成本低、结构简单,但运算量大,易受光照影响,不适用于农田等光照变化明显的环境[3-4];激光SLAM技术相对成熟,测距准确,受光照影响较小,且激光雷达相比于相机、超声波、红外传感器等具有抗干扰能力强、精度高、测量范围广等优势,更适用于农业环境[5-7]。目前主流的农业机器人搭载的激光雷达以低成本、低帧率的激光雷达为主,然而低帧率激光雷达不可避免地存在运动畸变及误匹配等问题[8]。针对运动畸变去除问题,孟蕾等[9]通过点对线迭代最近点(Point-to-Line Iterative Closest Point,PL-ICP)算法对激光雷达相邻2帧数据进行匹配以获得机器人的相对位姿变换,改进粒子滤波器的建议分布函数;Jun等[10]提出了一种异常值剔除方案,在使用最近点迭代算法(Iterative Closest Point,ICP)对点云数据进行匹配时剔除不匹配的部分,提高运算效率及系统鲁棒性;Shi等[11]提出一种基于正态分布变换的迭代最近配准算法,解决了传统ICP算法在点云规模较大时配准速度慢的问题。以上研究均利用ICP算法对点云进行配准,但由于ICP算法需要对2帧点云数据进行匹配,所以机器人位姿变化造成的点云数据误差会对激光点云匹配造成较为严重的影响。针对ICP算法的这一问题,王雅仪等[12]提出全球卫星导航系统(Global Navigation Satellite System, GNSS)数据融合激光SLAM的方案,使用GNSS提供机器人位姿信息辅助构建点云地图,但在农业环境中卫星信号受农作物遮挡严重,无法使用GNSS进行辅助;Hong等[13]提出了速度更新迭代最近点VICP(Velocity Updating Iterative Closest Point)算法,将机器人的运动考虑在内,认为获取激光数据的过程中机器人在做匀速运动,从而解决机器人位姿估计问题,但匀速运动的假设过于理想,不能真实的反应机器人运动的情况;Yan等[14]提出一种分层点云全局优化算法,通过ICP算法对重叠点云进行匹配,构造机器人位姿图对轨迹进行优化,最后通过优化后的轨迹对点云进行细化消除采集点云的不一致性,但机器人位姿图的获取较为复杂,计算量较大。
综上,使用纯估计方法去除激光雷达运动畸变存在无法准确反映机器人运动情况、计算量较大等问题。通常移动机器人会通过编码器的脉冲数计算估计机器人的位置和姿态,即里程计信息,里程计具有较高的更新频率,可以较为准确地反应机器人的运动情况,且具有较高精度的局部位姿估计[15]。为此,本研究拟采用里程计辅助的方法,在传统Gmapping算法的基础上融合里程计信息,为每一帧激光数据匹配一个较为准确的机器人位姿,以去除激光雷达运动畸变。
1 材料与方法
1.1 研究平台
本研究移动机器人平台选择jetson nano开发板作为控制系统平台,搭载Ubuntu 18.04系统,并运行机器人操作系统(Robot Operating System, ROS),实现对传感器信息的处理及导航功能的实现;STM32F103RCT6 主控芯片是底盘驱动的核心,接收来自ROS系统的速度指令并经过转化实现对电机驱动控制,本研究采用GM37-520直流霍尔编码减速电机;激光雷达与jetson nano开发板直接连接;12 V 锂电池同时为激光雷达、电机、STM32、jetson nano kit完成供电。移动机器人平台如图1所示。
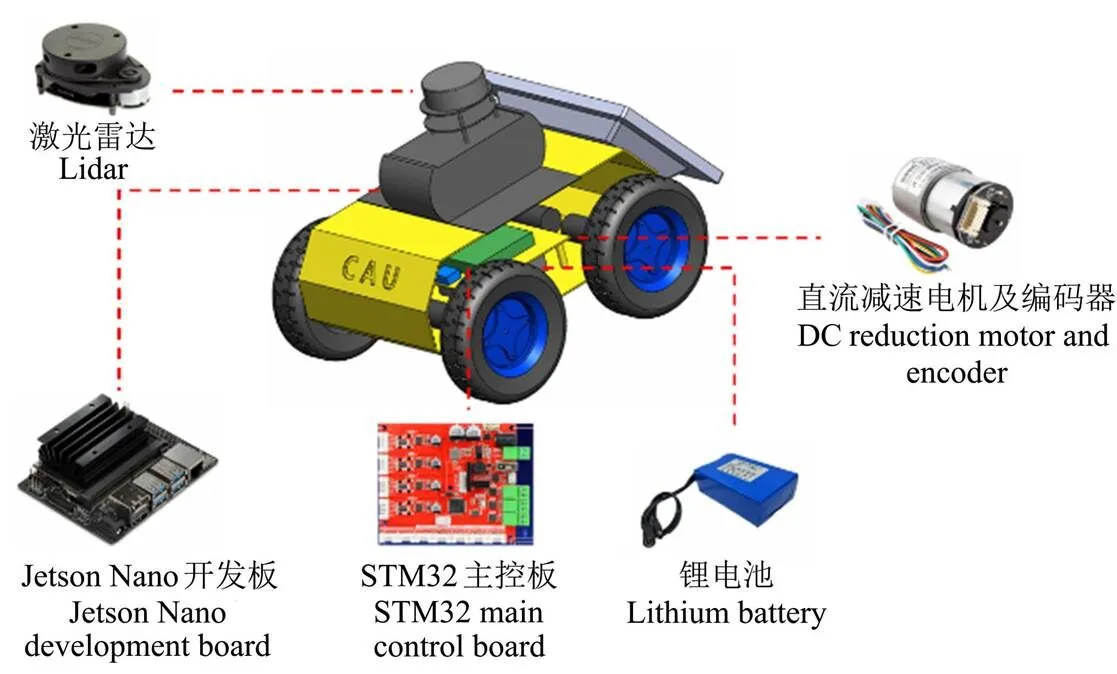
图 1 移动机器人平台
其中,本文机器人搭载的激光雷达为思岚科技有限公司研发的RPLIDAR A1。相比于其他类型的激光雷达,RPLIDAR A1价格低廉、使用时间长且具有较好的稳定性[16]。RPLIDAR A1的扫描频率最大为10 Hz,测距范围最大可达12 m,根据雷达性能参数,本文设置其扫描频率为5 Hz。本研究基于此平台进行SLAM方法的研究并进行分析。
1.2 研究方法
1.2.1 SLAM问题概率描述

其中1:t代表机器人启动到时刻传感器测量数据,本文中主要指激光雷达数据;1:t指机器人启动到时刻一系列的控制数据,即里程计信息;在获取上述两种数据的情况下同时对地图和机器人位姿1:t进行估计。
根据条件联合概率分布可进一步简化为

式中(1:t|1:t,1:t)表示机器人的位姿估计问题;(|1:t,1:t)表示在已知机器人位姿和传感器观测数据的情况下进行地图构建。
由此可见,精确的机器人即时定位与地图构建依赖于高精度的激光雷达数据。本研究基于经典的激光SLAM算法——Gmapping算法展开进一步分析。
1.2.2 激光雷达运动畸变分析
激光SLAM建图的过程为控制机器人移动的同时激光雷达对环境持续扫描,进而生成二维栅格地图[19]。激光雷达数据的获取伴随着机器人的运动,而一般激光雷达进行数据封装时默认一帧激光雷达数据是在机器人同一位姿下采集的,这导致了机器人建图过程中的激光数据存在畸变。图2所示为机器人获取一帧激光数据的运动过程,在机器人顶端中心位置搭载扫描频率为5 Hz的激光雷达,即获取一帧激光数据首尾时间差为 200 ms。
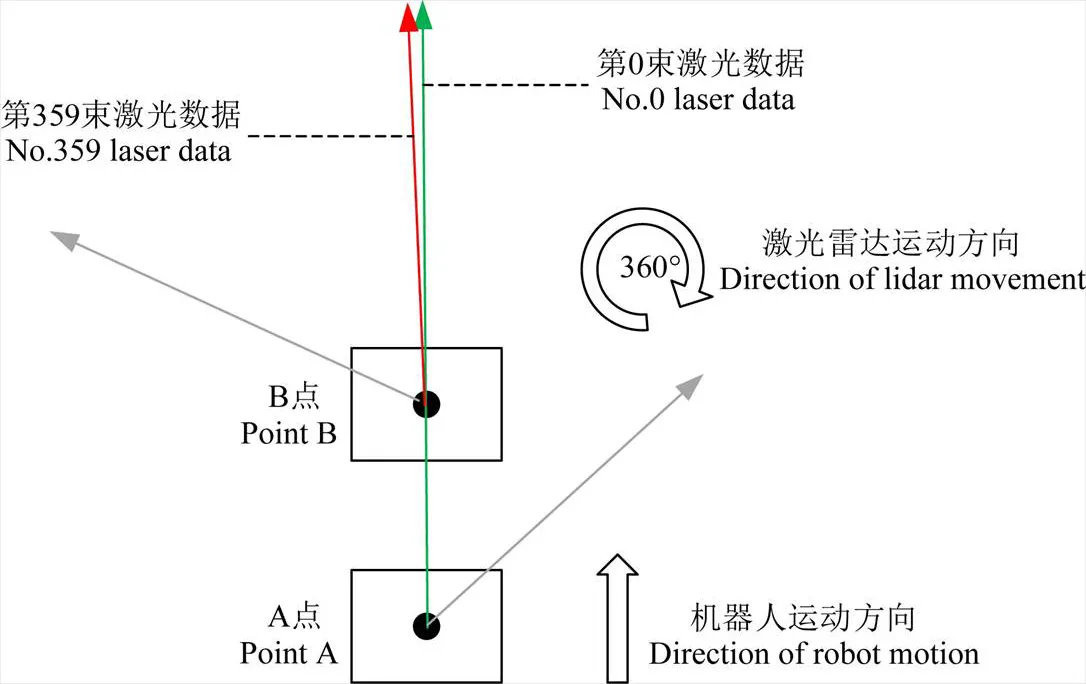
图2 激光雷达运动畸变示意图
假设机器人以0.5 m/s的速度由A点运动至到B点,与此同时,激光雷达沿逆时针方向旋转获取一帧激光数据,即在A点获取第0束激光数据,在B点获取第359束激光数据,该帧激光数据首尾时间差为200 ms。经计算可得出A点至B点之间的距离为 10 cm,即获取该帧激光数据的过程中机器人位置发生了10 cm 的移动,并非在同一位姿下获取到了完整的一帧激光数据。所以当使用低帧率的激光雷达获取环境信息时,激光雷达运动畸变是一个不能忽略的问题。
1.2.3 去除激光雷达运动畸变
为了解决低帧率激光雷达存在的运动畸变问题,本研究使用较高更新频率里程计信息反映激光数据采集过程中机器人的运动状况。设置激光雷达扫描频率为5 Hz,里程计信息更新频率大于激光雷达扫描频率,为20 Hz,确保可以为每一个激光束都匹配到较为精确的机器人位姿,基于传统Gmapping算法,使用轮式里程计辅助解决激光雷达运动畸变的问题。在激光雷达扫描到的一帧数据中,为每一个激光束的原点都匹配一个近似的里程计位姿,并认为该激光束是在该里程计位姿上采集到的,再进行进一步的坐标变换,把所有激光点数据都变换到第一束激光原点的坐标系基准坐标系下,也即基准坐标系,最后重新进行数据封装,从而减小运动畸变,具体流程如图3所示。
具体步骤如下:
1)激光雷达与里程计数据时间同步
在CPU获取激光雷达数据的同时,单片机上传里程计数据,对激光雷达数据和里程计数据进行时间同步及数据对齐。定义当前帧激光数据的起始和结束时间分别为t、t,为了确保可以为该帧激光数据的每个激光点都匹配到里程计信息,将里程计数据按照时间顺序存储在一个队列中,且该队列中最早的里程计数据时间戳小于t,最晚的里程计数据时间戳大于t。
2)线性插值
为了获得每个激光点对应的里程计位姿,对机器人运动的时间段进行线性近似与线性插值。首先求解t时刻的里程计信息p:
式中LinarInterp()表示线性插值方法;t至t时间段为线性近似得到的分段,且t<t<t;p、p分别为机器人在t、t时刻的位姿。同理可求得p。再对p至p的里程计队列中进行线性插值,得到个位姿{p,p+1, …,p+k–2,p},在个位姿之间进行线性插值,得到每一个激光点时间戳对应的里程计信息,记为{1,2, …,p–1,p}[20]。
3)坐标变换
在得到每一个激光点时间戳对应的位姿信息后,将该帧激光数据中每个激光点的坐标进行坐标转换:
式中z为第个激光点去除运动畸变前的坐标;p为对里程计信息进行线性插值得到的第个激光点对应的机器人位姿;′为经过坐标变换后去除运动畸变的第个激光点坐标,记为
(4)
4)数据封装
在得到去除运动畸变后的激光点坐标后,对激光数据重新封装后进行发布:
式中 (e,e)为去除运动畸变后第个激光点的坐标;为第个激光点距离该激光束原点的距离,即该激光束的长度,m;为该激光束的角度,rad。
至此,完成第个激光点的运动畸变去除,同理可去除一帧激光数据中所有激光点的运动畸变。
2 试验设计
为了分析该研究运动畸变去除效果,基于1.1节中介绍的机器人平台,运用Gmapping算法及去除运动畸变后的Gmapping算法进行SLAM建图试验,通过测量建图精度分析运动畸变去除效果。试验于2021年3月在中国农业大学上庄实验站玉米田及广西亚热带农科新城香蕉园中进行,试验场景如图4所示。
为了对比去除运动畸变前后的建图效果,将两种算法的参数设置保持一致,包括设置地图更新频率为5 Hz,传感器探测最大范围为 5 m,最终生成分辨率为0.025 dpi的二维栅格地图[21-23]。建图具体操作流程如下:
1)启动ROS节点管理器;
2)启动底盘驱动节点、里程计节点、激光雷达节点、遥控节点;
3)启动建图程序的可执行文件,订阅传感器数据话题开始构建地图;
4)使用遥控器控制机器人移动,通过可视化工具Rviz实时监测机器人建图情况;
5)地图构建完成后进行保存。
2.1 玉米田试验方案
建图区域为5行玉米作物行,总长约12 m,总宽约6 m,遥控机器人在玉米作物行之间进行移动完成整个作物行区域的环境建图。试验过程中,在农田中放置若干个标记物,首先对标记物之间的距离进行人工测距,获取距离真值,将地图测量的距离值与距离真值进行比较以检验建图精度。为了降低人工测量误差对试验结果的影响,本次试验选取多个采样点,将长度相似的采样点作为一组,选择8个0.6 m左右的距离作为第1组采样点,10个1.5 m左右的距离作为第2组采样点,5个12 m左右的距离作为第3组采样点。分别使用两种算法进行10次建图,获得地图后对每组采样点进行测距,取平均值后与距离真值进行比较。
2.2 香蕉园试验方案
香蕉园中选择的建图区域长约25 m,宽约4 m。选择3个不同长度的距离作为采样点,长度分别为4.23、8.42和24.43 m。使用两种算法在香蕉园中进行10次建图,获取地图后对3个采样点进行测距并与人工测量真值进行对比。
3 结果与分析
3.1 玉米田试验结果与分析
玉米田部分建图效果如图5所示,由于人工种植的玉米田为非结构化环境,所以去除运动畸变前后的Gmapping算法在玉米田的直观建图效果上并无较大差异。本研究通过3组采样点的测量结果分析去除运动畸变前后的Gmapping算法的精度,测量结果如图6所示。
由结果分析可知,在玉米田构建地图试验中,去除运动畸变后的Gmapping算法相较于传统Gmapping算法在0.6和1.5 m左右的距离测量精度上有小幅度的提升,平均绝对误差均由0.02 m降低至0.01 m,在0.6 m左右的距离平均建图精度由97.0%提升至99.1%,在1.5 m左右的距离平均建图精度由98.3%提升至99.2%;在12 m左右的距离地图测量平均绝对误差由 0.06 m降低至0.01 m,平均建图精度由99.1%提升至99.5%。去除运动畸变前后的Gmapping算法3种距离的建图精度差异不大,但是随着建图距离的增加,Gmapping算法的累积误差不断增大,而去除运动畸变后的Gmapping算法的累积误差均为0.01 m。由此可见,去除运动畸变后的Gmapping算法在玉米田中建图累积误差较小,建图精度较高。
3.2 香蕉园试验结果与分析
去除运动畸变前后的香蕉园建图效果如图7所示,由于香蕉园中障碍物形态多变且复杂,直观建图效果并无较大差异。3个采样点地图测距与人工测量真值对比分析结果如图8及表1所示。
由试验结果可知,去除运动畸变后的Gmapping算法相比于改进前的Gmapping算法,在4.23 m的香蕉园作物行区域平均绝对误差由0.08 m降低至0.06 m,平均建图精度由98.1%提升至99.0%;在8.42 m的区域平均绝对误差由0.13 m降低至0.06 m,平均建图误差由97.8%提升至98.5%;在24.43 m的区域内平均绝对误差由0.46 m降低至0.07 m,降低了0.39 m,平均建图误差由98.1%提升至99.1%。去除运动畸变后Gmapping算法的建图误差相比于Gmapping算法均有小幅度的提升,且Gmapping算法的累积误差随着建图区域长度的增加不断增大,而去除运动畸变后的Gmapping算法建图累积误差均在0.07 m左右,有较高的建图精度。

图7 部分香蕉园建图结果

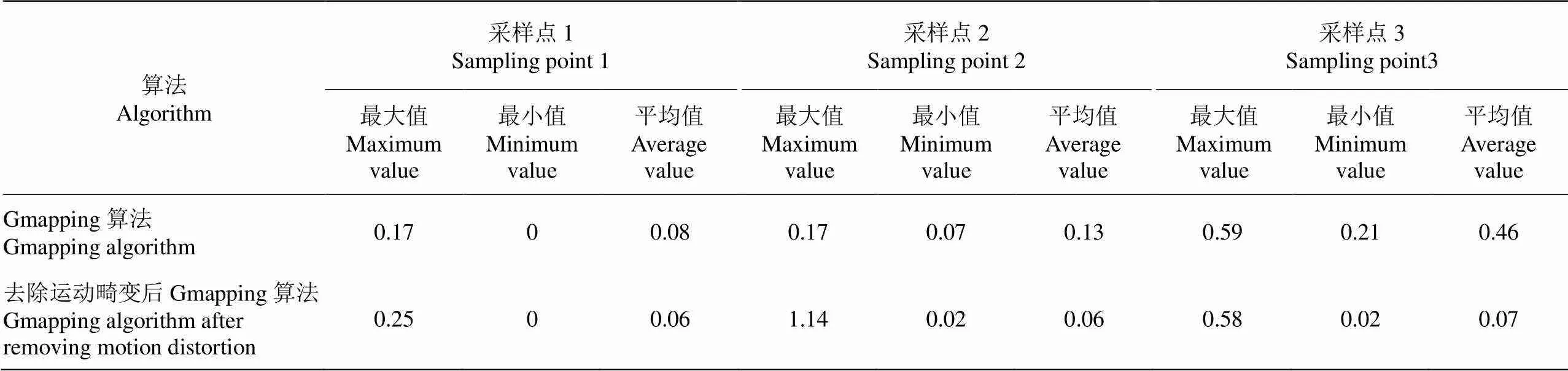
表1 香蕉园建图总体误差情况
综合玉米田间和香蕉园中的建图试验结果可以看出,去除运动畸变Gmapping算法相较于传统Gmapping算法在较长区域内建图效果有明显的提升,累积误差较小,使用低帧率激光雷达可以得到精度较高的环境地图,基本满足机器人在农业环境中的环境地图构建需求。
4 讨 论
1)本文利用轮式移动机器人在玉米田进行了SLAM建图试验,试验结果表明,在玉米田中建图平均绝对误差均为0.01 m;在香蕉园中建图平均绝对误差在0.07 m左右,均有较高的建图精度。李辉[24]在机器人上搭载二维激光雷达使用Hector_slam算法在距离小于3 m的室内环境中建图误差为0.01 m,在距离30 m以内的室内环境中建图误差平均为0.05 m;吴成鼎[25]在机器人上搭载二维激光雷达使用Cartorgrapher算法在长为8.54 m、宽为3.97 m的室内环境中建图误差为0.07 m。由此可见,本研究算法在农业环境中的建图精度不低于Hector_slam及Cartorgrapher算法在室内环境中的建图精度,但Hector_slam算法需要高帧率的激光雷达完成环境建图,Cartorgrapher算法计算量大,对内存资源要求较高。相比之下,本研究算法可基于低成本的机器人平台在农田环境下完成高精度的环境建图。
2)本研究里程计信息发布频率为20 Hz,激光雷达扫描频率为5 Hz,基本可以满足为每一个激光束都匹配到较为精确位姿的需求。里程计信息发布的频率决定着激光束匹配位姿的精确程度,进而也会影响SLAM建图精度,为了验证不同频率的里程计信息发布频率对去除运动畸变效果的影响,下一步将进行多组对照试验进行分析。
3)在农田等地面不平整的环境中,里程计信息存在一定误差,对建图结果产生影响。在试验前使用电子罗盘或惯性测量单元对里程计信息进行校正,可以得到更加精确的里程计数据及环境地图,进而提升环境建图的精度。
5 结 论
1)本文从概率的角度对SLAM问题进行分析,并对使用低帧率激光雷达进行地图构建存在的运动畸变问题进行了讨论,分析得出使用高频率的里程计信息进行辅助可以有效解决低帧率激光雷达存在的运动畸变问题。
2)针对低帧率激光雷达的运动畸变问题,在Gmapping算法的基础上融合里程计信息,为每一帧激光数据匹配到近似的机器人位姿,进而实现更加精确环境地图构建。
3)试验结果表明,在长度为12 m左右的玉米田区域,本研究算法建图平均误差为0.01 m,相比于Gmapping算法降低了0.05 m,建图精度为99.5%;在长度为24.43 m的香蕉园区域,本研究算法建图平均绝对误差为0.07 m,相比于Gmapping算法降低了0.39 m,建图精度为99.1%,表明本研究算法较为有效地解决了低帧率激光雷达存在的运动畸变问题,可基本满足机器人在农业环境中的环境建图需求。
[1] 季宇寒,李寒,张漫,等. 基于激光雷达的巡检机器人导航系统研究[J]. 农业机械学报,2018,49(2):14-21.
Ji Yuhan, Li Han, Zhang Man, et al. Navigation system for inspection robot based on lidar[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 14-21. (in Chinese with English abstract)
[2] 李道亮,包建华. 水产养殖水下作业机器人关键技术研究进展[J]. 农业工程学报,2018,34(16):1-9.
Li Daoliang, Bao Jianhua. Research progress on key technologies of underwater robot for aquaculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(16): 1-9. (in Chinese with English abstract)
[3] 陈劭,郭宇翔,高天啸,等. 移动机器人RGB-D视觉SLAM算法[J]. 农业机械学报,2018,49(10):38-45.
Chen Shao, Guo Yuxiang, Gao Tianxiao, et al. RGB-D visual SLAM algorithm for mobile robots[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(10): 38-45. (in Chinese with English abstract)
[4] Fang B, Mei G, Yuan X, et al. Visual SLAM for robot navigation in healthcare facility[J]. Pattern Recognition, 2021, 113(12): 107822.
[5] 李晨曦,张军,靳欣宇,等. 激光雷达SLAM技术及其在无人车中的应用研究进展[J]. 北京联合大学学报,2017,31(4):61-69.
Li Chenxi, Zhang Jun, Jin Xinyu, et al. Research progress of lidar SLAM technology and its application in unmanned vehicles[J]. Journal of Beijing Union University, 2017, 31(4): 61-69. (in Chinese with English abstract)
[6] Shi Y, Wang H, Yang T, et al. Integrated navigation by a greenhouse robot based on an odometer/lidar[J]. Instrumentation Mesure Metrologie, 2020, 19(2): 91-101.
[7] 孙宗涛,朱永强. 2D激光slam算法在室内建图对比研究[J]. 内燃机与配件,2020(1):15-16.
Sun Zongtao, Zhu Yongqiang. Comparison of 2D laser slam algorithms for indoor map construction[J]. Internal Combustion Engine and Accessories, 2020(1): 15-16. (in Chinese with English abstract)
[8] 黄瑞,张轶. 高适应性激光雷达SLAM[J]. 电子科技大学学报,2021,50(1):52-58.
Huang Rui, Zhang Yi. High adaptive lidar SLAM[J]. Journal of University of Electronic Science and Technology, 2021, 50(1): 52-58. (in Chinese with English abstract)
[9] 孟蕾,王臣臣,李康. 基于蛇形机器人的SLAM技术研究[J]. 制造业自动化,2020,42(7):59-61,73.
Meng Lei, Wang Chenchen, Li Kang. Research on SLAM technology based on snake-like robot[J]. Manufacturing Automation, 2020, 42(7): 59-61, 73. (in Chinese with English abstract)
[10] Jun J H, Moon C B. Development of a practical ICP outlier rejection scheme for graph-based SLAM using a laser range finder[J]. International Journal of Precision Engineering and Manufacturing, 2019, 20(10): 1735-1745.
[11] Shi X, Peng J, Li J, et al. The iterative closest point registration algorithm based on the normal distribution transformation[J]. Procedia Computer Science, 2019, 147: 181-190.
[12] 王雅仪,余萌,朱锋. 线面特征结合的三维激光SLAM算法及性能评估[J]. 导航定位学报,2021,9(1):122-129.
Wang Yayi, Yu Meng, Zhu Feng. Three-dimensional laser SLAM algorithm and performance evaluation based on line and surface features[J]. Journal of Navigation and Positioning, 2021, 9(1): 122-129. (in Chinese with English abstract)
[13] Hong S, Ko H, Kim J. VICP: Velocity updating iterative closest point algorithm[C]. IEEE International Conference on Robotics & Automation. IEEE, 2012.
[14] Yan L, Dai J, Tan J, et al. Global fine registration of point cloud in lidar SLAM based on pose graph[J]. Journal of Geodesy and Geoinformation Science, 2019,48(3): 313-321.
[15] 赵新洋. 基于激光雷达的同时定位与室内地图构建算法研究[D]. 哈尔滨:哈尔滨工业大学,2017.
Zhao Xinyang. Research on Simultaneous Localization and Indoor Map Construction Algorithm Based on Lidar[D]. Harbin: Harbin Institute of Technology, 2017. (in Chinese with English abstract)
[16] 李昊. 基于激光雷达的二维即时定位与制图技术研究[D]. 南京:东南大学,2018.
Li Hao. Research on Two-Dimensional Real-time Positioning and Mapping Technology Based on Lidar[D]. Nanjing: Southeast University, 2018. (in Chinese with English abstract)
[17] 陈卫东,张飞.移动机器人的同步自定位与地图创建研究进展[J]. 控制理论与应用,2005,22(3):455-460.
Chen Weidong, Zhang Fei. Research progress on synchronous self-localization and map creation of mobile robots[J]. Control Theory and Application, 2005, 22(3): 455-460. (in Chinese with English abstract)
[18] Guo L, Wang H, Meng Q, et al. FastSLAM and its data association approaches for mobile robots[C]// IEEE International Conference on Automation & Logistics. IEEE, 2007.
[19] Christopher C, Alexander L. FastSLAM using compressed occupancy grids[J]. Journal of Sensors, 2016 (3): 1-23.
[20] Bezet O, Cherfaoui V. Time error correction for laser range scanner data[C]. International Conference on Information Fusion. IEEE, 2007.
[21] Zhang X, Lai J, Xu D, et al. 2D lidar-based SLAM and path planning for indoor rescue using mobile robots[J]. Journal of Advanced Transportation, 2020(3): 1-14.
[22] 罗元,余佳航,汪龙峰,等. 改进RBPF的移动机器人同步定位与地图构建[J]. 智能系统学报,2015(3):460-464.
Luo Yuan, Yu Jiahang, Wang Longfeng, et al. Improved RBPF mobile robot synchronous positioning and map construction[J]. Journal of Intelligent System, 2015(3): 460-464. (in Chinese with English abstract)
[23] Peng W, Chen Z, Zhang Q, et al. A loop closure improvement method of Gmapping for low cost and resolution laser scanner[C]. 8th IFAC Conference on Manufacturing Modelling, Management and Control, 2016.
[24] 李辉. 基于激光雷达的2D-SLAM的研究[D]. 杭州:浙江工业大学,2017.
Li Hui. Research on 2D-SLAM Based on Lidar[D]. Hangzhou: Zhejiang University of Technology, 2017. (in Chinese with English abstract)
[25] 吴成鼎. 基于Cartographer的室内SLAM系统研究与实现[D]. 福州:福州大学,2018.
Wu Chengding. Research and Implementation of Indoor SLAM System Based on Cartographer[D]. Fuzhou: Fuzhou University, 2018. (in Chinese with English abstract)
Positioning and map construction for agricultural robots integrating odometer information
Li Chenyang1, Peng Cheng2, Zhang Zhenqian1, Miao Yanlong1, Zhang Man1, Li Han2※
(1.100083;2.100083)
A relatively low-cost and low frame rate lidar can be very popular to serve as the main sensor of Simultaneous Localization and Mapping (SLAM) in the mainstream agricultural robots at present. The lidar can scan the environment, while the pose of the robot can also change in the SLAM process. However, motion distortion and mismatching can often occur for the environment mapping, because one frame of lidar data can be obtained under the same pose of the robot by default. The resulting errors in the SLAM map can directly determine the accuracy of the automatic navigation of the robot. In this study, a commonly-used classical SLAM Gmapping was utilized to integrate the odometer information, to reduce the motion distortion of lidar with a low frame rate. The displacement and angle of the robot were directly measured with high accuracy of local position using an odometer, one type of important pose sensor in robots. An approximate odometer pose was also matched for each laser point in a frame of data that was scanned by lidar, according to the odometer information of high frequency. Among them, the odometer information was considered to be the collected laser points, thereby obtaining their coordinates after removing the motion distortion. Finally, the data was re-encapsulated to reduce the motion distortion of low frame rate lidar data on the map construction in this frame. A SLAM mapping test was also carried out to verify the improved Gmapping in a maize field and banana garden using a robot equipped with RPLIDAR A1 lidar with a scanning frequency of 5 Hz. The experimental results showed that the average absolute error of the improved Gmapping was 0.01 m in the maize field with a length of about 12 m, 0.05 m lower than that of the original one (0.06 m). In the banana garden area with a length of 24.43 m, the average absolute error of the improved Gmapping was 0.07 m, 0.39 m lower than that of the original one (0.46 m). Consequently, the mapping accuracy of the improved Gmapping was higher than before in the agricultural environment, indicating that the motion distortion of lidar with a low frame rate can be removed effectively.
robots; sensors; mapping; motion estimation; data fusion
10.11975/j.issn.1002-6819.2021.21.003
S24
A
1002-6819(2021)-21-0016-08
李晨阳,彭程,张振乾,等. 融合里程计信息的农业机器人定位与地图构建方法[J]. 农业工程学报,2021,37(21):16-23.doi:10.11975/j.issn.1002-6819.2021.21.003 http://www.tcsae.org
Li Chenyang, Peng Cheng, Zhang Zhenqian, et al. Positioning and map construction for agricultural robots integrating odometer information[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(21): 16-23. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.21.003 http://www.tcsae.org
2021-07-21
2021-10-23
国家自然科学基金项目(32171893);中国农业大学建设世界一流大学(学科)和特色发展引导专项资金(2021AC006);中国农业大学 2115 人才工程资助项目
李晨阳,研究方向为农业机器人导航技术。Email:txlichenyang@163.com
李寒,博士,副教授,博士生导师,研究方向为农业电气化与自动化。Email:cau_lihan@cau.edu.cn
